智能控制导论大作业3
- 格式:docx
- 大小:116.33 KB
- 文档页数:6
智能控制导论论文(简述智能控制的发展与应用)智能控制导论论文●系别:●班级:●姓名:●学号:●日期:简述智能控制的发展与应用摘要:本文主要介绍了智能控制技术的主要方法,并介绍了智能控制在各行各业中的应用。
关键字:发展智能控制应用一、简述:应用随着人们生活水平的提高,人们对智能控制的需求与日俱增。
智能控制五花八门,从工业控制到日常生活的边边角角都有智能控制的身影。
中国智能控制发展非常迅速,业内竞争也异常激烈。
同时随着计算机应用的普及和软应用的发展,室内灯光控制技术已经不含太多的技术机密。
已经有很多公司可以根据客户需求定制控制系统。
同时智能控制还会进一步深入发展,并且和互联网及通讯技术相结合,形成一种双向互动控制,智能水平就更高了!随着信息技术的发展,许多新方法和技术进入工程化、产品化阶段,这对自动控制技术提出犷新的挑战,促进了智能理论在控制技术中的应用,以解决用传统的方法难以解决的复杂系统的控制问题。
智能控制的核心是如何设计和开发能够模拟人类职能的机器,是控制系统达到更高的目标。
二、智能控制的概念智能控制(intelligent controls),在无人干预的情况下能自主地驱动智能器实现控制目标的自动控制技术。
对许多复杂的系统,难以建立有效的数学模型和用常规的控制理论去进行定量计算和分析,而必须采用定量方法与定性方法相结合的控制方式。
定量方法与定性方法相结合的目的是,要由机器用类似于人的智慧和经验来引导求解过程。
因此,在研究和设计智能系统时,主要注意力不放在数学公式的表达、计算和处理方面,而是放在对任务和现实模型的描述、符号和环境的识别以及知识库和推理机的开发上,即智能控制的关键问题不是设计常规控制器,而是研制智能机器的模型。
此外,智能控制的核心在高层控制,即组织控制。
高层控制是对实际环境或过程进行组织、决策和规划,以实现问题求解。
为了完成这些任务,需要采用符号信息处理、启发式程序设计、知识表示、自动推理和决策等有关技术。
1、模糊控制是一种模拟人类语言系统的控制策略。
A.对B.错正确答案:对2、模糊化是实现将模糊推理结果转换为执行机构能够接受的定值定量信号的过程。
A.对B.错正确答案:错3、模糊控制器在实际设计过程中常常将推理这一步转换为离线查询表,用于提高控制输出的速度。
A.对B.错正确答案:对4、模糊集合中的隶属度范围为[0 ~ 10]。
A.对B.错正确答案:错5、模糊推理中存在多个已知模糊关系时,需要将多个模糊关系矩阵进行合并运算后再参与推理。
A.对B.错正确答案:对1、专家系统的本质是一段计算机程序。
A.对B.错正确答案:对2、间接性专家控制器完全取代了原有控制器的作用。
A.对B.错正确答案:错3、专家PID控制器的作用在于实时调整比例系数、积分时间和微分时间的参数,以使控制器能够适应控制现场的需要。
A.对B.错正确答案:对4、推理机的作用在于存储专家知识等数据。
A.对B.错正确答案:错5、专家系统支持专家用户界面实现对知识库的内容更新、删除等操作。
A.对B.错正确答案:对见面课:神经网络数据预测应用实例1、人工神经网络的本质是一个函数。
A.对B.错正确答案:对2、神经网络拓扑结构中的一个圆圈结点表示一个细胞核。
A.对B.错正确答案:错3、神经网络权值可以随着训练而被改变。
A.对B.错正确答案:对4、神经网络训练分为批量训练和在线训练。
A.对B.错正确答案:对5、神经网络的训练样本量没有明确规定,和神经网络内部的网络参数个数无关。
A.对B.错正确答案:错见面课:遗传算法解决旅行商问题1、遗传算法是迭代优化算法的一种。
A.对B.错正确答案:对2、遗传算法在迭代过程中不能实现寻优加速。
A.对B.错正确答案:错3、遗传算法操作包括选择、交叉和变异。
A.对B.错正确答案:对4、交叉概率和变异概率在0~1之间,且取值尽量大。
A.对B.错正确答案:错5、遗传算法优化PID参数是在控制理论中的典型应用之一。
A.对B.错。
智能控制导论⼤作业3智能控制导论姓名*****学号******学院⾃动化与电⽓⼯程学院专业控制科学与⼯程班级*****指导⽼师******粒⼦群算法的⼩波神经⽹络在变压器故障诊断中的应⽤与改进摘要:针对变压器故障征兆和故障类型的⾮线性特性,结合油中⽓体分析法,设计了⼀种改进粒⼦群算法的⼩波神经⽹络故障诊断模型。
模型采⽤3层⼩波神经⽹络,并⽤⼀种改进粒⼦群算法对其进⾏训练。
该算法在标准粒⼦群算法的基础上,通过引⼊遗传算法中的变异算⼦、惯性权重因⼦和⾼斯加权的全局极值,加快了⼩波神经⽹络训练速度,提⾼了其训练的精度。
仿真实验证明这种改进粒⼦群算法的⼩波神经⽹络可以有效地运⽤到变压器故障诊断中,为变压器故障诊断提供了⼀条新途径。
引⾔:本⽂在变压器故障诊断智能⽅法的基础上,⾸先构造了3层⼩波神经⽹络模型,然后通过在标准粒⼦群算法中加⼊变异算⼦、惯性权重因⼦和⾼斯加权的全局极值,构成⼀种改进的粒⼦群优化算法,并将其运⽤于⼩波神经⽹络参数优化,通过变压器故障诊断结果表明这种改进的粒⼦群算法⽐相同条件下的BP 算法和标准粒⼦群算法具有更好的收敛性。
1 ⼩波神经⽹络构建⼩波神经⽹络是⼀种基于⼩波变换理论⽽构造的前馈神经⽹络,其充分利⽤了⼩波变换的局部化性质和神经⽹络的⼤规模数据并⾏处理、⾃学习能⼒,因⽽具有较强的逼近能⼒和较快的收敛速度,其主要可分为松散型和紧密型两种类型。
本⽂采⽤紧密型结构来构造⼩波神经⽹络,构造出来的3层⼩波神经⽹络如图1 所⽰。
设输⼊层节点个数为m,隐含层⼩波元个数为n,输出层节点个数为N,输⼊层的第k 个输⼊样本为x k,输出层的第i 个节点实际输出值为y i,输出层的第i 个节点期望输出值为y?i,输⼊层节点k 与隐含层节点j 之间的连接权值为kj ,输出层节点i 与隐含层节点j 之间的连接权值为ji ,第j 个隐层节点的伸缩平移系数分别为j a 和j b ,隐层⼩波神经元采⽤Mexican Hat⼩波函数,输出层节点采⽤Sigmoid 函数。
第1篇一、实验目的1. 理解智能控制的基本概念和原理;2. 掌握智能控制系统的组成和结构;3. 熟悉MATLAB编程技术及SIMULINK仿真平台的使用;4. 通过实验验证智能控制算法在解决实际问题中的应用效果。
二、实验原理智能控制是自动控制理论的最新研究阶段,它结合了人工智能、专家系统、模糊逻辑、神经网络等技术,实现对复杂系统的有效控制。
智能控制的特点是无需建立被控对象的精确数学模型,具有自适应、自学习、自组织等能力。
三、实验内容1. 智能控制系统组成及结构分析;2. 专家控制系统设计;3. 模糊控制系统设计;4. 神经网络控制系统设计;5. 智能控制算法在SIMULINK仿真平台上的实现;6. 实验结果分析。
四、实验步骤1. 熟悉智能控制系统的基本概念和原理;2. 设计专家控制系统,包括知识库、推理机、解释器等模块;3. 设计模糊控制系统,包括模糊化、模糊推理、解模糊等模块;4. 设计神经网络控制系统,包括网络结构、学习算法、权值调整等模块;5. 在SIMULINK仿真平台上搭建智能控制系统,并进行仿真实验;6. 分析实验结果,验证智能控制算法的有效性。
五、实验结果与分析1. 专家控制系统:通过设计知识库、推理机、解释器等模块,实现了对特定问题的智能决策。
实验结果表明,专家控制系统具有较高的准确性和可靠性。
2. 模糊控制系统:通过模糊化、模糊推理、解模糊等模块,实现了对被控对象的模糊控制。
实验结果表明,模糊控制系统具有较好的鲁棒性和适应性。
3. 神经网络控制系统:通过设计网络结构、学习算法、权值调整等模块,实现了对被控对象的神经网络控制。
实验结果表明,神经网络控制系统具有较高的学习能力和泛化能力。
4. 智能控制算法在SIMULINK仿真平台上的实现:通过在SIMULINK仿真平台上搭建智能控制系统,验证了智能控制算法在解决实际问题中的应用效果。
实验结果表明,智能控制系统具有较高的控制性能。
六、实验总结通过本次实验,我们对智能控制的基本概念、原理、技术与应用有了更深入的了解。
智能控制导论(dǎo lùn)大作业摘要(zhāiyào):智能(zhì nénɡ)控制(intelligent controls)是一项基于(jīyú)人工智能(artificial intelligence)而发展成熟的学科。
伴随(bàn suí)着人工智能的发展,人们得以将自动控制发展为智能控制。
智能控制的思潮起源于20世纪60年代的自动控制专家和人工智能专家们的研究。
在半个世纪的岁月中,智能控制已经得到长足的发展。
1985年IEEE在纽约召开了第一届智能控制学术讨论会,随后成立的IEEE智能控制专业委员会更是标志着智能控制这一新学科的形成。
近30年,科学界和工程界对智能控制的研究也越发的活跃起来。
智能控制作为一门新兴学科正式登上了国际科学的舞台,并对各界有者十分重要的意义和影响。
现在的通常指的智能控制主要包括但不限于:神经网络控制贝叶斯控制模糊(逻辑)控制神经模糊控制专家系统遗传控制智能代理(认知/意识控制)关键词:智能(zhì nénɡ)控制发展(fāzhǎn) 理论(lǐlùn) 方法(fāngfǎ) 应用前景前言:智能控制是一类新的控制技术,利用各种智能计算方法如神经网络,贝叶斯概率,模糊逻辑,机器学习,进化计算和遗传算法来实现功能。
智能控制正渐渐取代自动控制并成为人类自动控制科学技术的未来。
智能控制发展简史:早在中古时代,人们就有了对智能机器及对其进行控制的的幻想,比如传说中鲁班制造的机械鸟。
到了启蒙时期,文艺复兴带来的思想解放也使人们更加大胆的去幻想各种智能机器。
意大利人达芬奇流传下来的图纸中就有了不少关于智能机械的设想。
到了工业时代,差分机的设想被认为是现代计算机的起源,奥左斯特. 艾达.洛夫莱斯伯爵夫人(Ada语言即使以她为名)甚至开始研究算法,编写程序,希望差分机能智能地解决数学问题。
南京工程学院自动化学院《智能控制技术》大作业课程名称:智能控制技术院(系、部、中心):康尼学院专业:自动化班级: K自动化121 姓名:刘爽学号: 240120902课程论文成绩评定:指导教师签字:2015 年 6 月 24 日摘要模糊控制是以模糊集合论作为它的数学基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景.本文简要回顾了模糊控制理论的发展,详细介绍了模糊控制理论的原理和模糊控制器的设计步骤,分析了模糊控制理论的优缺点以及模糊控制需要完善或继续研究的内容,根据各种模糊控制器的不同特点,对模糊控制的应用进行了分类,并分析了各类模糊控制器的应用效能.最后,展望了模糊控制的发展趋势与动态。
关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展第一节引言1。
1 模糊控制系统简介模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术.自从美国加利福尼亚大学控制论专家L.A.Zadeh教授在1965年提出的《Fuzzy Set》开创了模糊数学的历史,吸引了众多的学者对其进行研究,使其理论和方法日益完善,并且广泛的应用于自然科学和社会科学的各个领域,尤其是第五代计算机的研制和知识工程开发等领域占有特殊重要的地位.把模糊逻辑应用于控制领域则始于1973年.1974年英国的E.H.Mamdani成功地将模糊控制应用于锅炉和蒸汽机的控制.此后20年来,模糊控制不断发展并在许多领域中得到成功应用。
由于模糊逻辑本身提供了由专家构造语言信息并将其转化为控制策略的一种体系理论方法,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题,所以它是处理推理系统和控制系统中不精确和不确定性的一种有效方法。
智能控制导论智慧树知到课后章节答案2023年下昆明理工大学昆明理工大学第一章测试1.智能控制最大的优点在于不需要精确的数学模型。
A:对 B:错答案:对2.傅京孙提出了智能控制的二元论,包括了人工智能和自动控制。
A:错 B:对答案:对3.智能控制在任何场合下的控制效果都一定比经典控制理论中的要好。
A:错 B:对答案:错4.智能控制主要用于解决传统控制难以解决的复杂系统的控制问题。
A:对 B:错答案:对5.智能控制理论的学习属于自动控制任务中解决信号难以检测的问题。
A:对 B:错答案:错6.以下特点不属于智能控制的是()A:优化能力 B:适应能力 C:学习功能 D:实时性高答案:实时性高7.智能控制的重要分支不包括()A:专家控制 B:自适应控制 C:模糊控制 D:神经网络控制答案:自适应控制8.智能控制的任务在于设计一个控制器,使之具有学习、抽象、推理和决策等功能。
A:对 B:错答案:对9.智能控制研究对象的特点不包括()A:快速计算 B:不确定性模型 C:复杂的控制要求 D:高度非线性的模型答案:快速计算10.1987年1月,在美国举行了第一届国际智能控制大会,标志着智能控制领域的形成。
A:对 B:错答案:对第二章测试1.专家系统其实就是一段计算机程序,该程序具备某领域内专家水平的知识和经验,具有解决专门问题的能力。
A:错 B:对答案:对2.专家控制分为直接型专家控制器和间接型专家控制器,专家PID控制器属于间接型。
A:对 B:错答案:错3.以下不属于专家控制的特点的是()A:鲁棒性B:适应性C:灵活性D:网络结构答案:网络结构4.专家系统结构中的关键部分为知识库和推理机。
A:错 B:对答案:对5.常用的知识表达方法为:产生式规则、框架、语义网络、过程。
A:对 B:错答案:对6.推理机中的正向推理是从结果中得到原始数据和已知条件。
A:错 B:对答案:错7.专家控制的规则库一般采用产生式规则表示,IF 控制局势THEN 操作结论。
《智能控制》大作业姓名:王阵伟班级:自动化学号:310210510621011、简答题:1.1.根据目前智能控制系统的研究和发展,智能控制系统主要有哪些方面的工作可做进一步的探索和开展?目前研究方向内容: 1 智控的基础理论和方法研究 2 智控的系统结构研究 3 基于知识系统及专家控制 4 基于模糊系统的智能控制 5 基于学习及适应性的智控 6 基于神经网络的智控7 基于信息论和进化论的学习控制器研究8 其他,如计算机智能集成制造系统,智能计算系统,智能并行系统,智能容错控制,智能机器人等。
需要探索的方面: 1 开展智控理论与应用的研究2 充分运用神经生理学心理学认知科学和人工智能等学科的基本理论,深入研究人类解决问题时表现出来的经验技巧策略,建立切实可行的智控体系结构; 3 把现有的知识工程模糊系统信息论进化论神经网络理论和技术与传统的控制理论相结合,充分利用现有的控制理论,研究适合于当前计算机资源条件的智控策略和系统;4 研究人-机交互式的智控系统和学习系统以不断提高智控系统的智能水平; 5 研究适合智控系统的并行处理机信号处理器智能传感器和智能开发工具软件,以解决智控系统在实际应用中存在的问题,使智控得道更广泛应用。
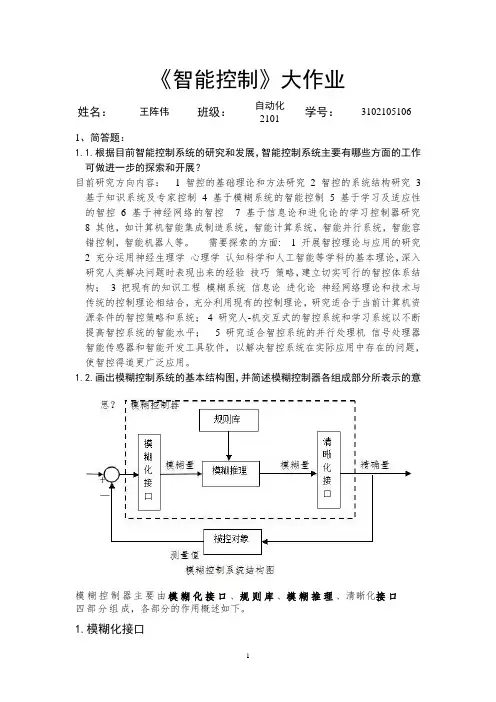
1.2.画出模糊控制系统的基本结构图,并简述模糊控制器各组成部分所表示的意模糊控制器主要由模糊化接口、规则库、模糊推理、清晰化接口四部分组成,各部分的作用概述如下。
1.模糊化接口模糊化是通过在控制器的输入、输出论域上定义语言变量,来将精确的输入、输出值转换为模糊的语言值。
它的作用是将真实的确定量输入转换为一个模糊量。
把物理量的清晰制转换成模糊语言变量的过程叫做清晰量的模糊化2.规则库模糊控制器的规则是基于专家知识活手动操作人员长期积累的经验,他是按人的直觉推理的一种语言表达形式。
模糊规则通常有一系列的关键词连接而成,如if-then、else、also、end等,关系词必须经过“翻译”才能将模糊规则数值化。
智能控制导论作业之智能控制的应用实例|自动化专业实习报告|毕业实习报告|暑假实习报告|暑期实习报告|实习报告范文|大学生实习报告|大学实习报告|实习总结若图片无法显示请联系站长智能控制的应用实例1、引言智能控制是近年来控制界新兴的研究领域, 自1985年召开第一届智能控制学术会至今,智能控制已经被广泛应用于社会众多领域。
为解决那些基于精确数学模型的传统控制方法难以解决的复杂系统的控制问题提供了有效的理论和方法。
它是对传统控制理论的发展,是自动控制发展的高级阶段,代表着自动控制科学发展的最新进程。
随着人们生活水平的不断提高,家居环境或是休闲娱乐场所都安装各种各样的观赏型鱼缸,而保持一个适宜水族生活的环境是一件非常耗费精力的工作。
针对水族生活环境的净化和改善的设备有很多,目前市场上常用的鱼缸控制系统有:过滤器、加热器、加氧泵等改善水质的设备,但是它们大多是非智能化的、单独工作的器件。
如果仅仅把多个单独的设备组成一套多功能的鱼缸控制系统,需要投入的费用较大,同时多个单一器件机械化的组装之后,也存在一定的资源浪费,该系统则是从系统集成开发的角度进行设计和开发,根据当前市场上的需求,形成了一套集恒温控制、自动充氧、自动水位控制进排水,自动照明和自动喂食等功能为一体的控制系统。
系统以AT89S52单片机为核心,实现对鱼缸的集中控制和管理。
下面从系统设计的功能组成、系统控制参数,系统控制核心部分的硬件设计电路和程序控制流程图等方面加以描述。
2、系统的功能组成与系统控制参数2.1系统功能组成该系统的设计是在充分了解并分析目前各类鱼缸控制器的前提下进行的,整个系统共分为以下几个功能子系统:即自动加热/制冷恒温控制,自动/定时充氧系统, 自动水位控制系统, 自动水循环系统, 自动照明系统, 自动喂食控制系统等。
这些子系统都有各自的信号检测输入以及控制输出功能,并结合系统的时钟电路,数据存储电路/看门狗/复位电路以及各子系统的功能参数的设置与LED显示电路,共同集成为一套功能完善的智能控制系统。
⾃动化智能控制⼤作业《智能控制》⼤作业1、简答题:1.1.根据⽬前智能控制系统的研究和发展,智能控制系统有哪些类型以及智能控制系统主要有哪些⽅⾯的⼯作可做进⼀步的探索和开展?答: 智能控制系统的类型:①基于信息论的分级递阶智能控制②以模糊系统理论为基础的模糊逻辑控制③基于脑模型的神经⽹络控制④基于知识⼯程的专家控制⑤基于规则的仿⼈智能控制⑥各种⽅法的综合集成智能控制系统的探索和开展:①离散事件和连续时间混杂系统的分析与设计;②基于故障诊断的系统组态理论和容错控制⽅法;③基于实时信息学习的规则⾃动⽣成与修改⽅法;④基于模糊逻辑和神经⽹络以及软计算的智能控制⽅法;⑤基于推理的系统优化⽅法;⑥在⼀定结构模式条件下,系统有关性质(如稳定性等)的分析⽅法等。
1.2.⽐较智能控制与传统控制的特点?答:智能控制与传统控制的特点。
传统控制:经典反馈控制和现代理论控制。
它们的主要特征是基于精确的系统数学模型的控制。
适于解决线性、时不变等相对简单的控制问题。
智能控制:以上问题⽤智能的⽅法同样可以解决。
智能控制是对传统控制理论的发展,传统控制是智能控制的⼀个组成部分,在这个意义下,两者可以统⼀在智能控制的框架下。
1.3.简述模糊集合的基本定义以及与⾪属函数之间的相互关系。
答:模糊集合:模糊集合是⽤从0 到1 之间连续变化的值描述某元素属于特定集合的程度,是描述和处理概念模糊或界限不清事物的数学⼯具。
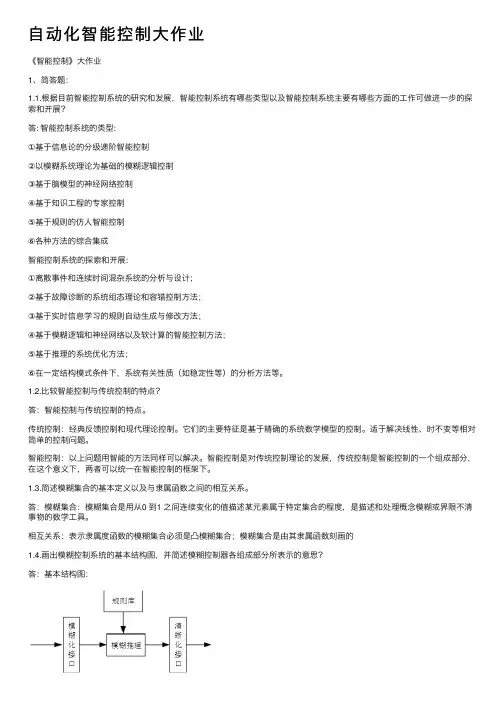
相互关系:表⽰⾪属度函数的模糊集合必须是凸模糊集合;模糊集合是由其⾪属函数刻画的1.4.画出模糊控制系统的基本结构图,并简述模糊控制器各组成部分所表⽰的意思?答:基本结构图:(1) 模糊化接⼝:模糊化接⼝就是通过在控制器的输⼊、输出论域上定义语⾔变量,来将精确的输⼊、输出值转换为模糊的语⾔值。
(2) 规则库:由数据库和语⾔(模糊)控制规则库组成。
数据库为语⾔控制规则的论域离散化和⾪属函数提供必要的定义。
语⾔控制规则标记控制⽬标和领域专家的控制策略。
智能控制导论大作业学号:021151**姓名:**任课教师:吴**目录一、说明…………………………………………………………………I.文章出处…………………………………………………………二、论文翻译……………………………………………………………I.摘要……………………………………………………………… II.引言……………………………………………………………… III.背景信息…………………………………………………………… IV.神经网络整体结构……………………………………………… V.神经网络的整体的标定中的应用……………………………… VI.总结………………………………………………………………三、课程与论文关系……………………………………………………四、智能导论课程总结…………………………………………………一、说明本次大作业针对“Improved Calibration of Near-Infrared Spectra by Using Ensembles of Neural Network Models”文章进行翻译。
这篇文章摘自IEEE SENSORS JOURNAL, VOL. 10, NO. 3, MARCH 2010。
作者是Abhisek Ukil, Member, IEEE, Jakob Bernasconi, Hubert Braendle, Henry Buijs, and Sacha Bonenfant。
二、论文翻译利用神经网络模型整体对近红外光谱校正改进摘要:红外(IR)或近红外(NIR)光谱技术是用来识别一种混合物或来分析材料的组成的方法。
NIR光谱的校准是指利用光谱的多变量描述来预测各组分的浓度。
建立一个校正模型,最先进的软件主要使用线性回归技术。
对于非线性校正问题,基于神经网络的模型已经被证明是一个有意义的选择。
在本文中,我们提出了一个新的基于神经网络的扩展传统的方法,利用神经网络模型整体。
题目:浅谈智能控制班级:姓名:学号:目录摘要 (3)Abstract (3)1.前言 (4)2.智能控制的定义 (4)3.传统控制系统的特点 (5)4.传统智能控制面临的难题 (5)5.智能控制系统的特点 (6)6.智能控制的研究内容 (6)6.1 分层递阶控制系统 (7)6.2学习控制系统 (8)6.3专家控制系统 (9)6.4人工神经网络控制系统 (10)6.5模糊控制系统 (11)7.智能控制的发展与前景 (11)参考文献 (12)浅谈智能控制摘要本文是对智能控制的一个综述,结合这学期学习智能控制原理与应用的感悟,介绍了智能控制产生的定义,特点,应用,研究内容,对智能控制所面临的问题与挑战进行了叙述,还具体阐述了未来发展的趋势和前景,说明了智能控制象征着自动化的未来。
智能控制正是在各行各业应用中的一个缩影,它的作用以及影响力将会关系到国民生计。
又因为在当今社会各行各业中,智能控制技术对实现生产过程自动化有着更为积极的作用。
所以智能控制技术的研究和发展也越来越成为当代科学的一门重要课程。
AbstractThis paperis an overview of theintelligent control,it introduces the definition, the characteristic ,the application and the research contents of intelligent control.It describes the problems and challenges faced by intelligent control,the future development trends and prospects.So intelligent control symbolizes the future of automation.Intelligent control is so important that it relates to national life.Because in today's society in all walks of life, intelligent control technology has play a more active role to achieve automation of the production process.Therefore, the research and development of intelligent control technology is increasingly becoming an important course of contemporary science.关键词:智能控制定义人工智能传统控制研究内容发展与前景1.前言人类的进化归根结底是智能的进化,而智能反过来又为人类的进步服务。
智能控制导论姓名*****学号******学院自动化与电气工程学院专业控制科学与工程班级*****指导老师******粒子群算法的小波神经网络在变压器故障诊断中的应用与改进摘要:针对变压器故障征兆和故障类型的非线性特性,结合油中气体分析法,设计了一种改进粒子群算法的小波神经网络故障诊断模型。
模型采用3层小波神经网络,并用一种改进粒子群算法对其进行训练。
该算法在标准粒子群算法的基础上,通过引入遗传算法中的变异算子、惯性权重因子和高斯加权的全局极值,加快了小波神经网络训练速度,提高了其训练的精度。
仿真实验证明这种改进粒子群算法的小波神经网络可以有效地运用到变压器故障诊断中,为变压器故障诊断提供了一条新途径。
引言:本文在变压器故障诊断智能方法的基础上,首先构造了3层小波神经网络模型,然后通过在标准粒子群算法中加入变异算子、惯性权重因子和高斯加权的全局极值,构成一种改进的粒子群优化算法,并将其运用于小波神经网络参数优化,通过变压器故障诊断结果表明这种改进的粒子群算法比相同条件下的BP 算法和标准粒子群算法具有更好的收敛性。
1 小波神经网络构建小波神经网络是一种基于小波变换理论而构造的前馈神经网络,其充分利用了小波变换的局部化性质和神经网络的大规模数据并行处理、自学习能力,因而具有较强的逼近能力和较快的收敛速度,其主要可分为松散型和紧密型两种类型。
本文采用紧密型结构来构造小波神经网络,构造出来的3层小波神经网络如图1 所示。
设输入层节点个数为m,隐含层小波元个数为n,输出层节点个数为N,输入层的第k 个输入样本为x k,输出层的第i 个节点实际输出值为y i,输出层的第i 个节点期望输出值为yˆi,输入层节点k 与隐含层节点j 之间的连接权值为kj ,输出层节点i 与隐含层节点j 之间的连接权值为ji ,第j 个隐层节点的伸缩平移系数分别为j a 和j b ,隐层小波神经元采用Mexican Hat小波函数,输出层节点采用Sigmoid 函数。
通过前向计算得到隐含层第j 个小波元的输入为:通过小波基伸缩平移系作用,隐含层第j 个小波元的输出为:则网络输出层第i 个节点输出为:网络输出误差能量函数为:2 改进粒子群算法优化小波神经网络传统小波神经网络多以BP算法进行网络训练,但BP 算法存在收敛速度慢、易陷入局部极小值等缺点,难以满足网络高精度训练的要求。
本文提出一种改进粒子群算法,即在标准粒子群算法的基础上加入遗传算法中的变异算子、惯性权重因子和高斯加权的全局极值,并将其运用于优化小波神经网络各个参数。
标准粒子群算法的思想为:先初始化一群随机粒子,然后根据对个体和群体的飞行经验的综合分析来动态调整粒子群的速度,在解空间中进行搜索,通过迭代找到最优解。
在每一次迭代中,粒子通过跟踪两个“极值”来更新自己,一个是个体极值pbest,即粒子自身目前所找到的最优解;另一个是全局极值gbest,即整个种群目前找到的最优解。
假设在一个D 维的目标搜索空间中,有m 个粒子组成一个群体。
当第i 个粒子被迭代到到目前为止最好的位置(即具有最佳适应度)时,此时该粒子被称为个体最好粒子,记为pbest i,而当全部粒子迭代到截止当前为止最好位置时被称为全局最好粒子,记为gbest。
各粒子可根据以下公式来更新自己的速度和位置。
对上述标准粒子群算法进行三个方面的修改,构成本文的改进粒子群算法,具体表现在:①为了避免粒子群算法搜索精度低、后期迭代效率不高的现象,借鉴遗传算法中的变异思想,在粒子群算法中加入变异算子,即粒子每次更新之后都以一定的概率重新初始化粒子,变异操作拓宽了迭代中不断缩小的种群搜索空间,使粒子能够跳出先前搜索到的最优位置,保持了种群的多样性。
其相应的伪代码如下所示:if 随机数概率大于0.9则随机初始化种群else 保持种群数值大小不变②标准粒子群算法中一般设置惯性权重因子(k)为1,由于惯性权重因子是影响当前粒子速度的变量,较大的值有利于全局搜索,较小的值有利于局部搜索,为了更好地平衡算法的搜索能力,提出了一种线性递减的惯性权重因子,如式(6)所示。
③为解决迭代后期全局极值不易向最优解方向收敛的问题,引入高斯加权的全局极值[15]。
首先把所有粒子的适应度函数的平均值作为高斯加权的均值,其方差作为高斯加权的方差,即再将当前粒子群的最小适应度值fitness_min 作为高斯加权的中心,即可得到高斯加权的全局因子为:最后将所有粒子的个体极值pbest i 和上述高斯加权的全局因子进行加权平均,并将此值作为所有粒子的全局极值,即通过高斯函数加权,在算法迭代后期,越靠近最优解的个体极值其权重越大,它们的乘积有利于全局极值向最优解方向收敛。
改进粒子群算法训练图1 所示的三层小波神经网络步骤如下。
步骤1:初始化粒子群。
确定粒子的维数D(即网络中的各个参数个粒子的位置、速度;设定学习因子、惯性权重的最大及最小值,最大迭代次数及目标误差值,并置此时的迭代次数为1。
步骤2:计算目标适应度值。
对于每个粒子,利用小波神经网络的前向计算公式计算网络的实际输出,再利用式(4)计算其适应度值,排序取出最小的适应度值fitness_min。
步骤3:评价每一个粒子。
个体极值更新:如果粒子适应度优于当前个体极值pbest i,则将pbest i 设置为新位置,否则pbest i 不变;全局极值更新:将由式(10)计算出的高斯加权的全局极值确定为粒子群的全局极值gbest。
步骤4:粒子位置和速度更新。
利用式(5)更新每一个粒子的速度和位置,并以一定概率重新初始化粒子。
其中速度的更新引入了由式(6)计算的惯性权重因子k。
步骤5:检验是否符合结束条件。
若当前的迭代次数达到了预先设定的最大次数(或达到最小误差要求),则停止迭代,输出最优解,否则转到步骤2。
3 小波神经网络的变压器故障诊断3.1 输入量的确定将上述改进粒子群算法优化的小波神经网络应用于变压器故障诊断中,在DGA 的基础上,选择H2、CH4、C2H6、C2H2、C2H4 及总烃(CH4+C2H6+C2H2+C2H4)的体积分数作为小波神经网络的输入变量,故输入节点的个数为6。
为了充分采集数据的有效信息,首先对原始输入值进行粗大误差处理,去除明显影响网络收敛精度的输入量,再求出剩下输入数据相对于其注意值的隶属度,最后将此隶属度作为小波神经网络的输入,即其中:i x 表示第i 种气体的实际值;i X 表示第i 种气体的注意值;i input 表示处理后的输入值;H2 的注意值为150 L/L,CH4的注意值为45 L/L,C2H6的注意值为35 L/L,C2H2的注意值为5 L/L,C2H4的注意值为65 L/L,总烃的注意值为150 L/L。
3.2 输出量的确定选择低温过热O1(T<300℃)、中温过热O2(300℃<T<700℃)、高温过热O3(T > 700℃)、局部放电或受潮O4、低能放电O5、高能放电O6 这6种典型单一故障类型作为小波神经网络的输出变量output ;实际故障时的输出有可能是单一故障的复合形式,故也选择高能放电兼高温过热O3O6、低能放电兼低温过热O1O5 和高温过热兼中温过热O2O3 这3 种典型复合故障。
输出节点的个数也为6,输出故障包含了所有单一故障类型和多故障类型[16]。
3.3 隐层节点数的确定网络的隐层节点个数有文献指出根据经验公式而来,即对6 输入6 输出小波神经网络而言,隐层节点数在12 左右最佳。
本文通过改变隐层节点个数来对比网络收敛性能,从而确定最为合适的隐层节点个数。
选取相关参考文献公布的84组故障类型数据(其中55 组单一故障类型数据、29组多故障类型数据)进行网络训练,10 组故障数据(其中6 组单一故障类型数据、4 组多故障类型数据)进行网络测试,训练次数设置为700 次,对比不同隐层节点个数情况下网络的均方误差(MeanSquare Error,MSE),如表1 所示。
从中可以看出当隐层节点数为12 时,训练样本和测试样本的MSE 最小,故本文的小波神经网络的隐层节点数选为12。
3.4 变压器故障诊断结果及分析在确定小波神经网络输入、输出及隐层节点之后,输入同样的变压器故障训练样本,且网络最大训练次数设置都设为1 500 次,最小误差都设置为10-3,分别用BP 算法优化的小波神经网络(BP-WNN)、标准粒子群算法优化的小波神经网络(PSO-WNN)和本文提出的改进粒子群算法优化的小波神经网络(改进PSO-WNN)对其进行训练,取最好的一次训练结果,由Matlab 编程可得训练误差曲线如图2 所示。
由图2 可知,BP-WNN、PSO-WNN 及改进PSO-WNN 在变压器故障诊断中的平均误差、收敛时间及收敛精度等方面有显著差异。
BP-WNN 经过1455 次达到预设精度,收敛时间长,主要原因为BP-WNN 仅仅具有复杂的非线性映射能力,没有反馈,易陷入局部极小值,故不能较好地满足变压器故障诊断实时性的要求;PSO-WNN 经过1119 次达到预设精度,在迭代前期收敛速度快,迭代后期速度变慢,主要原因为在迭代后期粒子向自身历史最佳位置和群体历史最佳位置聚集,形成粒子种群的快速趋同效应,陷入了“停滞现象”,故也不能较好满足变压器故障诊断的要求;改进的PSO-WNN 经过738次达到预设精度,收敛速度较前两者快,能够较好地满足故障诊断的要求。
4 结论本文针对变压器故障诊断实时性和高精度的要求,提出了利用小波神经网络对故障进行诊断,针对传统小波神经网络算法收敛速度慢、易陷入局部极小值等缺点,提出了一种改进的粒子群优化算法,并将其运用于小波神经网络参数优化中。
仿真结果表明,本文所采用的改进粒子群算法比传统BP 算法及PSO 算法的训练精度高、收敛速度快,提高了变压器诊断的准确性。
但是网络测试表明,复合故障的诊断误差比单一故障的诊断误差要大,因此,如何减小复合故障的诊断误差,提高对其诊断的精度是下一步研究的重点。