元胞自动机模型
- 格式:ppt
- 大小:12.88 MB
- 文档页数:40
元胞自动机模型的原理
元胞自动机(Cellular Automaton,CA)是一种离散化的动态系统,由一组相同的元胞组成,每个元胞都有自己的状态,它们可以根据一
定的规则进行状态转换。
元胞自动机模型的原理是基于这些元胞之间
的相互作用和状态转换,模拟出复杂的现象和行为。
元胞自动机模型的基本结构包括元胞、邻居、状态和规则。
元胞是模
型的基本单元,通常是一个正方形或立方体,每个元胞都有一个状态,可以是二进制、整数、浮点数等。
邻居是指与当前元胞相邻的其他元胞,通常是以当前元胞为中心的周围几个元胞。
规则是指元胞之间的
相互作用和状态转换规则,通常是一个函数,根据当前元胞和邻居的
状态,计算出下一个时刻的状态。
元胞自动机模型的演化过程是离散的,每个时刻都是一个状态,通过
规则计算出下一个时刻的状态,依次演化下去。
模型的演化可以是同
步的,即所有元胞同时进行状态转换,也可以是异步的,即每个元胞
按照一定的顺序进行状态转换。
模型的演化可以是确定性的,即规则
确定了下一个状态,也可以是随机的,即规则只是给出了下一个状态
的概率分布。
元胞自动机模型的应用非常广泛,可以用来模拟自然界中的现象和行
为,如生物群落的演化、物理系统的行为、社会网络的演化等。
元胞自动机模型还可以用来解决一些实际问题,如交通流量的优化、城市规划的设计等。
总之,元胞自动机模型是一种非常有用的数学工具,可以用来模拟复杂的现象和行为,具有很强的可视化和直观性,是研究自然界和社会现象的重要手段之一。
生物计算中的元胞自动机模型生物计算是一种广泛应用于生物医学、生态学、环境科学等领域的计算科学技术,在生命科学领域具有重要的应用价值。
其中,元胞自动机(CAC)模型是一种重要的生物计算模型,它利用计算机进行模拟,可以模拟复杂生物系统中的自组织现象、动态行为和时间演化等。
一、元胞自动机模型的基本理论元胞自动机是一种基于格点的离散动力学系统,又称为离散动力学系统。
其基本理论是将时间和空间坐标离散化,并将空间上的每个点分为一个小的正方形或立方体,称为元胞。
元胞自动机在空间上排列成一个网格状结构,称为元胞阵列。
元胞内有若干个状态,每个元胞根据其自身状态和周围元胞的状态,按照一定的规则进行演化。
这种演化是基于更高级别的规则,通过这些规则,元胞可以表现出一定的自组织特性,从而模拟生物系统中的某些现象。
二、元胞自动机模型的应用1. 生态系统模拟元胞自动机模型也可用于模拟生态系统的行为,例如森林通量和生态系统中种群的分布。
实际上,1986年,Thomas和,Peterman的研究中,模拟了一个湖泊生态系统,通过模拟 algal (微藻)的数量,在不同时间的分布,研究了外部进入的营养元素对湖泊生态系统的影响。
2. 疾病传播元胞自动机模型也可以用于模拟疾病传播,例如感染病毒或细菌。
利用元胞自动机模拟疾病的传播,可以研究不同人群之间传染病的传播机制,并预测疾病传播的趋势。
2020年初的 COVID-19 疫情中,元胞自动机模型被用于模拟病毒传播,并预测疫情趋势,为政府决策者提供了科学有效的决策依据。
3. 细胞模拟元胞自动机模型可以用来模拟细胞的行为,例如细胞的组织结构、生长、分裂和死亡。
最近的一项研究使用元胞自动机模拟了肠道细胞的发育,向我们展示了细胞在肠道中的组织结构、形态变化和生长模式。
三、元胞自动机模型的优缺点1. 优点元胞自动机模型的主要优点是简单易行,易于理解和应用。
它能够模拟自然系统的复杂行为,例如非线性现象、自组织等,而不需要进行复杂的统计或计算。
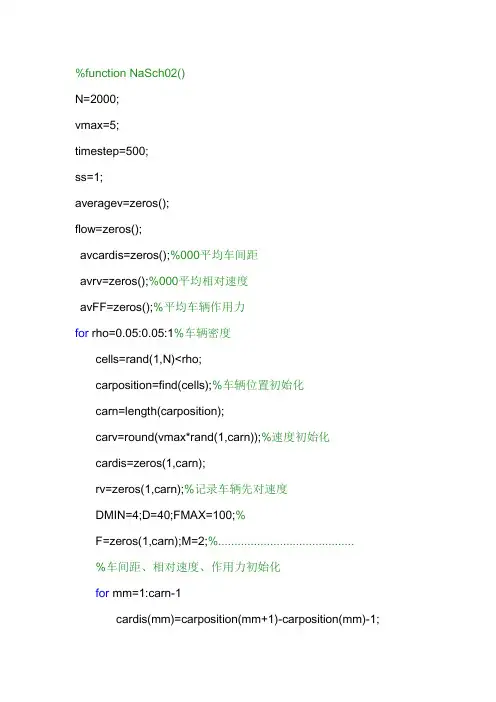
%function NaSch02()N=2000;vmax=5;timestep=500;ss=1;averagev=zeros();flow=zeros();avcardis=zeros();%000平均车间距avrv=zeros();%000平均相对速度avFF=zeros();%平均车辆作用力for rho=0.05:0.05:1%车辆密度cells=rand(1,N)<rho;carposition=find(cells);%车辆位置初始化carn=length(carposition);carv=round(vmax*rand(1,carn));%速度初始化cardis=zeros(1,carn);rv=zeros(1,carn);%记录车辆先对速度DMIN=4;D=40;FMAX=100;%F=zeros(1,carn);M=2;%..........................................%车间距、相对速度、作用力初始化for mm=1:carn-1cardis(mm)=carposition(mm+1)-carposition(mm)-1;rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr if DMIN<cardis(mm)<DF(mm)=M*rv(mm)^2/cardis(mm);%..........................elseif cardis(mm)>Drv(mm)=0;F(mm)=0;elserv(mm)=0;F(mm)=FMAX;endend%..........................endmm=mm+1;cardis(mm)=N+carposition(1)-carposition(mm)-1;rv(mm)=carv(1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrif DMIN<cardis(mm)<DF(mm)=M*rv(mm)^2/cardis(mm);%..........................elseif cardis(mm)>Drv(mm)=0;F(mm)=0;elserv(mm)=0;F(mm)=FMAX;endend%................................%车间距、相对速度、作用力初始化完成memor_cells=zeros(timestep,N);memor_cellv=zeros(timestep,N);memor_F=zeros(timestep,N);%............................memor_cardis=zeros(timestep,N);%000memor_rv=zeros(timestep,N);%000sumv=0;pmin=0.1;pmax=0.3; flag=0;%sumcardis=0;%00000000sumrv=0;%000for jj=1:timestep%开始更新for ii=1:carnif rv(ii)>=0flag=1;elseflag=0;endcarv(ii)=min(carv(ii)+1,vmax);%加速更新carv(ii)=min(carv(ii),cardis(ii));%减速if flag==1;pslow=pmin;elsepslow=pmax;endif rand(1)<pslowcarv(ii)=max(carv(ii)-1,0);%随机慢化endif (jj>100)sumv=sumv+carv(ii);%vvvvvvvvvvvvvvvvvvvvvvvvvvvv速度求和end%carpositon变化newposition=carposition(ii)+carv(ii);if newposition<=Ncarposition(ii)=newposition;elsecarposition(ii)=newposition-N;endmemor_cells(jj,carposition(ii))=1;end%速度位置更新完,进行车间距、相对速度的更新for mm=1:carn-1if carposition(mm)<carposition(mm+1)cardis(mm)=carposition(mm+1)-carposition(mm)-1;if cardis(mm)<vmax%rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrrrrrrrelse%rv(mm)=0;end%if cardis(mm)>D||cardis(mm)<DMINrv(mm)=0;end%F(mm)=M*rv(mm)^2/cardis(mm);%。

元胞自动机模型是一种模拟系统行为的离散模型,其中每个元素被称为元胞,它们遵循一组规则进行状态转移。
以下是构建元胞自动机模型的步骤:1.确定元胞空间首先,确定元胞的空间布局。
元胞空间通常是一个网格,元胞在网格中的位置可以用行和列的坐标表示。
根据问题的具体需求,可以选择不同大小的网格和元胞数量。
2.定义状态转移规则接下来,需要定义元胞的状态转移规则。
每个元胞的状态在一定时间步会根据一组规则进行更新。
这些规则通常包括相邻元胞的状态以及当前元胞的状态,它们共同决定了下一个状态。
例如,在“康威生命游戏”中,每个元胞的存活、死亡或繁殖取决于相邻元胞的状态。
3.初始化元胞状态在开始模拟之前,需要初始化元胞的状态。
这通常是一个随机过程,但也可以根据特定的问题背景进行初始化。
每个元胞都被赋予一个初始状态,这些状态在后续的迭代中会发生变化。
4.迭代更新状态迭代更新状态是模型的核心步骤,它涉及根据定义的规则将每个元胞从当前状态转移到下一个状态。
通常使用循环或递归实现这个步骤,每次迭代都根据当前状态计算下一个状态。
迭代过程中,可以记录下每个元胞的历史状态,以便后续分析。
5.分析结果最后,根据模型的实际应用,可以对结果进行分析。
例如,如果模型用于模拟生物群体的演化,可以观察不同时间步的群体结构变化;如果用于模拟交通流,可以分析交通拥堵的形成和传播。
此外,还可以通过可视化工具展示元胞自动机模型的状态演化过程。
总之,元胞自动机模型是一种强大的工具,可用于模拟各种复杂系统的行为。
通过以上步骤,可以构建出具有不同应用背景的元胞自动机模型,并通过迭代更新状态和分析结果来揭示系统的内在规律。
元胞自动机NaSch模型及其MATLAB代码作业要求根据前面的介绍,对NaSch模型编程并进行数值模拟:模型参数取值:Lroad=1000,p=0.3,Vmax=5。
边界条件:周期性边界。
数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。
基本图(流量-密度关系):需整个密度范围内的。
时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。
指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。
流量计算方法:密度=车辆数/路长;流量flux=density×V_ave。
在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N;流量flux=N/T。
在计算过程中可都使用无量纲的变量。
1、NaSch模型的介绍作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。
时间、空间和车辆速度都被整数离散化。
道路被划分为等距离的离散的格子,即元胞。
每个元胞或者是空的,或者被一辆车所占据。
车辆的速度可以在(0~Vmax)之间取值。
2、NaSch模型运行规则在时刻t到时刻t+1的过程中按照下面的规则进行更新:(1)加速:vnmin(vn1,vmax)规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。
(2)减速:vnmin(vn,dn)规则(2)确保车辆不会与前车发生碰撞。
(3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0)规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。
这一规则也是堵塞自发产生的至关重要因素。
(4)位置更新:,车辆按照更新后的速度向前运动。
其中vn,xn 分别表示第n辆车位置和速度;l(l≥1)为车辆长度;p表示随机慢化概率;表示n车和前车n+1之间空的元胞数;vmax为最大速度。


简述元胞自动机模型的组成元胞自动机模型是一种由离散时间、空间和状态组成的计算模型,它由一系列相同的元胞组成,每个元胞都有自己的状态,并且随着时间的推移,这些状态会根据一组规则进行更新和演化。
这一模型的构成主要包括元胞、邻居关系、状态和规则。
元胞是元胞自动机模型的基本单元,可以看作是一个离散的空间点。
每个元胞都有自己的状态,可以是离散的有限值,也可以是连续的变量。
元胞的状态可以代表不同的现象或属性,比如生命状态、颜色等。
元胞之间的邻居关系是元胞自动机模型中的重要概念。
邻居关系定义了每个元胞的相邻元胞,通常是通过确定元胞之间的空间位置关系来确定的。
常见的邻居关系有四邻域和八邻域,分别表示元胞上下左右和斜对角方向的相邻元胞。
元胞自动机模型中的状态是指每个元胞在某一时刻的属性或状态。
状态可以是离散的有限值,也可以是连续的变量。
在元胞自动机模型中,状态的演化是模型的核心,它描述了元胞状态如何根据一定的规则进行更新和变化。
状态更新的规则通常是基于元胞本身的状态以及其邻居元胞的状态,可以是确定性的或者是随机的。
规则是元胞自动机模型中状态更新的基础。
规则定义了元胞状态的变化方式,通常是通过一系列的判断条件和逻辑操作来实现的。
元胞自动机模型中的规则可以是简单的,也可以是复杂的。
简单的规则可能只涉及元胞本身的状态,而复杂的规则可能需要考虑元胞的邻居元胞的状态以及其他相关因素。
元胞自动机模型的组成可以总结为:元胞、邻居关系、状态和规则。
这一模型可以用来描述和模拟各种复杂的自然和社会现象,比如生物群体的演化、城市交通流量的变化等。
通过调整元胞自动机模型中的参数和规则,可以探索和研究系统的演化规律和特性,进而提供对现实世界的理解和预测。