磁悬浮球的数学模型
- 格式:doc
- 大小:926.99 KB
- 文档页数:44


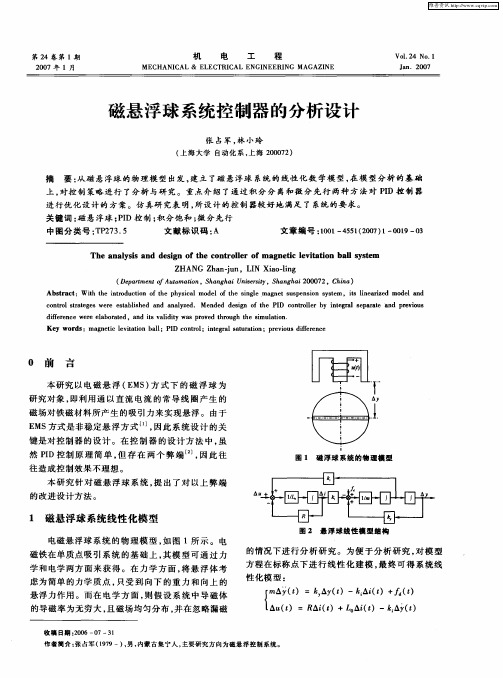

题9:磁悬浮实验磁悬浮实验装置由铁芯、线圈、光电源、传感器、控制器、功率放大器和被控对象钢球等元器件组成。
电磁铁绕组中通以一定的电流会产生电磁力,控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重量相平衡,钢球就可以悬浮在空中而处于平衡状态。
但是这种平衡状态是一种不稳定的平衡,这是由于电磁铁与钢球之间的电磁力大小与它们之间的距离成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的震动等),就会导致钢球掉下来或被电磁铁吸住,因此必须对系统实现闭环控制。
由光电源和传感器组成的测量装置检测钢球与电磁铁之间的距离变化,当钢球受到扰动下降,钢球与电磁铁之间的距离增大,传感器所敏感的光强增强,其输出电压增大,经控制器调节、功率放大器放大处理候,使电磁铁控制绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置。
(具体参数的数值可以自行给定)。
解:数学模型的建立:忽略其他干扰力的影响,钢球受到电磁力F 和重力mg 的作用。
钢球在竖直方向上的动力学方程为:()()22,d x t m m g F i x dt=-(1)式中:x 为磁极到钢球的气隙,即位移;m 为钢球的质量;F (i ,x )为电磁力。
由麦克斯韦公式得: ()2,i F i x K x ⎛⎫=⎪⎝⎭(2) 其中2/4o K AN μ=;o μ为空气磁导率;A 为铁芯的磁极面积;N 为线圈匝数。
忽略平衡点的电感作用,则电磁铁芯线圈中控制电压与电流的关系为:()()()1=di t U T Ri t L dt+ (3)式中:L1为线圈自身的电感;R 为电磁铁的等效电阻;i 为通过线圈的瞬时电流。
当球处于平衡状态时,其加速度为0,即钢球所受和外力为0.则由平衡条件可得:()200,00i m g F i x K x ⎛⎫== ⎪⎝⎭(4)对(2)式线性化,设系统的状态变量为1x =x , .2x x =, 3x i =,以线圈控制电压为输入,钢球位移为输出的系统状态方程如下:.11..21022.33110100=00100xx X x k i k x U R x x L L ⎡⎤⎛⎫⎡⎤ ⎪⎢⎥⎢⎥⎛⎫⎪⎢⎥⎢⎥ ⎪=-+ ⎪⎢⎥⎢⎥ ⎪ ⎪⎢⎥ ⎪⎢⎥⎝⎭⎪⎢⎥-⎢⎥ ⎪⎢⎥⎣⎦⎣⎦⎝⎭(5)式中: 200123222;ki ki k k m x m x ==将(5)式转化为传递函数的形式:()21231111k L G s Rk Rss k s L L =+--(6)用matlab 进行仿真分析:设系统的参数如下:m 为28g ,R 为14欧,1L 为118mH ,0x 为15mm ,0i 为1.2A ,K 为-5224.587*10/Nm A 。

八个有趣模型——研究电子设备的外接球
与内切球(学生版)
八个有趣模型——研究电子设备的外接球与内切球(学生版)
模型1:理想球模型
理想球模型是指在没有限制条件下,电子设备的外接球模型和内切球模型。
模型2:球装饰模型
球装饰模型是指在圣诞树装饰等场合下,采用球的形状装饰电子设备。
模型3:球几何模型
球几何模型是指将球体几何形体应用于电子设备外观设计中。
模型4:光学球模型
光学球模型是指将球体应用于电子设备内部灯光设计,通过球体折射效果营造奇妙效果。
模型5:实心球装饰模型
实心球装饰模型是指通过将多个小球组装在一起,形成实心球进行电子设备装饰和附加功能。
模型6:匀质球模型
匀质球模型是指根据电子设备的形状和质量进行设定,保证重心稳定,实现匀净旋转。
模型7:磁悬浮球模型
磁悬浮球模型是指通过磁悬浮技术构建电子设备的球形结构,实现悬浮和旋转的效果。
模型8:球形快充模型
球形快充模型是指将快充技术应用于球体结构的电子设备,通过球形结构实现快充电池的组装和排列。
以上是八种有趣的球体模型,它们在电子设备的外观设计和功能实现中都有着不同的应用。
学生们可以通过这些模型了解电子设备的设计理念和实际应用,为以后的创意设计打下基础。
声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
学生签名:年月日新疆大学毕业论文(设计)任务书班级:自动化081 姓名:论文(设计)题目:磁悬浮球系统的建模与仿真设计专题:要求完成的内容: 1. 学习系统建模方法和熟练MATLAB语言。
2. 熟悉磁悬浮球控制系统的工作原理。
3. 建立磁悬浮球控制系统的数学模型。
4. 分析磁悬浮球控制系统的稳定性。
5. 磁悬浮球控制系统的控制器(PID,模糊)的设计。
6. 用SIMULINK建模进行仿真实验进行分析。
7. 编写毕业设计说明书。
发题日期:年月日完成日期:年月日实习实训单位:地点:论文页数:页;图纸张数:指导教师:教研室主任:院长:摘要磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。
随着电子技术、控制工程、处理信号元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。
本实验平台可以使用多种控制器和控制方法,适用于相关人员的研究和实验工作。
研究和设计磁悬浮球控制系统实验平台是本文的主要工作,本文在分析磁悬浮球控制系统工作原理的基础上,设计了一套磁悬浮球控制系统实验平台。
本文着重介绍控制器的设计过程。
在此基础上,本文利用了MATLAB设计了基于计算机的磁悬浮PID传统控制和模糊PID控制器。
所研制的控制器软件设计方法简单、性能稳定、实时调试方便。
关键词:磁悬浮球控制系统;稳定性;传统PID控制器;模糊PID控制器ABSTRACTMagnetic Suspension is one of typical mechanics and electronics technology,which includes the electromagnetics, electron technology, control engineering, signaldisposal, mechanics and dynamics.As the electronic technology, control engineering, processing signal components, electromagnetic theory and the development of new electromagnetic material and the progress of the rotor dynamics, maglev technology got rapid progress. This experiment platform can use a variety of controller and the control method, apply to relevant personnel of research and experimental work.This thesis focuses on the research and design of Magnetic Suspension ball Control System testing platform. Based on analyzing of Magnetic Suspension ball Control system's working principle, the thesis designs a Magnetic Suspension ball Control System testing platform.The paper emphasizes the design process.On this basis, this paper use based on MATLAB design of magnetic levitation PID traditional computer control and fuzzy PID controller. The developed controller software design method is simple, stable performance, real-time debugging is convenient.Keywords: maglev ball control system;stability;the traditional PID controller;the fuzzy PID controller目录1 绪论 (5)1.1 磁悬浮技术综述 (5)1.1.1 前言 (5)1.1.2 磁悬浮方式的分类 (5)1.1.3 磁悬浮控制方法的现状与发展趋势 (5)1.2 课题的提出及意义 (6)1.3 本论文的工作及主要内容 (6)2 磁悬浮球系统组成及系统模型 (8)2.1 磁悬浮球系统组成 (8)2.2 磁悬浮球系统工作原理 (8)2.3 磁悬浮球系统的数学模型 (8)2.4 磁悬浮球系统闭环控制 (12)3 传统控制器的研究与设计 (13)3.1 引言 (13)3.2 控制器设计 (13)3.2.1 PID控制器基本控制规律 (13)3.2.1.1 比例控制器(P调节器) (13)3.2.1.2 积分控制器(I调节器) (14)3.2.1.3 微分控制器(D调节器) (15)3.2.1.4 比例-微分控制器(PD调节器) (15)3.2.1.5 比例-积分控制器(PI调节器) (16)3.2.1.6 比例-积分-微分控制器(PID调节器) (17)3.2.2 PID控制器的参数整定 (19)3.2.3 PID调节器参数的工程整定 (21)3.2.3.1工程实验法整定 (21)3.2.3.2 Ziegler-Nichols参数整定法 (22)3.3 磁悬浮球系统PID参数整定及系统仿真 (24)3.3.1 不加控制器时磁悬浮球系统及其系统仿真 (24)3.3.2 PID参数整定的步骤及系统仿真 (28)4 模糊PID控制器的设计 (32)4.1引言 (32)4.2模糊控制器简介 (32)4.2.1模糊控制的基本原理 (32)4.2.2 模糊控制器的结构 (32)4.3 模糊控制系统的设计 (34)4.3.1 模糊控制器的结构设计 (34)4.3.2 模糊控制器的基本设计 (35)4.3.3 模糊PID控制器结构及参数自整定原则 (36)4.3.4 模糊PID控制器的设计 (37)4.3.5 基于MATLAB的模糊PID控制系统的仿真研究 (39)5 总结与展望 (42)5.1总结 (42)5.2 今后的研究方向 (42)致谢 (43)1 绪论1.1 磁悬浮技术综述1.1.1 前言磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
磁悬浮球系统的指数趋近律滑模控制摘要:磁悬浮球系统具有非线性、不稳定特性,本文将其模型在平衡点附近进行线性化处理,根据系统状态方程设计了指数趋近律滑模控制器,利用Lyapunov稳定理论对系统进行稳定性分析,并在磁悬浮球系统装置上进行实验研究。
结果表明:采用指数趋近律滑模控制能使磁悬浮球以较小偏差平稳地悬浮在给定位置附近,且系统具有较好的跟踪特性。
关键词:磁悬浮球系统;指数趋近律;滑模控制1 引言磁浮球系统是一个单自由度、开环不稳定的非线性系统,系统中参数摄动和外界不确定干扰因素都会影响系统的性能。
采用传统的PID控制时,虽然具有较好的稳定性,但由于固定的控制器参数,会使系统的控制性能受到限制。
为了解决这个问题,人们引入了许多新的控制策略,如模糊控制[1]、模糊PID[2]、鲁棒控制[3,4]、预测控制[5]、滑模控制[6-9]等,将其应用于磁悬浮球系统中。
滑模控制(SMC)无需精确的对象模型,具有响应速度快、对参数及外加干扰不灵敏、控制器实现简单等优点[10,11]。
目前已经在电机与电力系统控制、机器人控制、飞行器控制及卫星姿态控制等领域得到了实际应用。
滑模控制最显著的特性就是存在滑动模态,系统一旦进入滑动模态,其运动状态将保持在切换面或切换面的一个邻域上,同时对外界干扰具有较强的鲁棒性。
本文将指数趋近律滑模控制用于磁悬浮球系统中,利用Lyapunov稳定理论对系统进行稳定性分析,并在磁悬浮球系统装置上进行实验研究。
结果表明:采用指数趋近律滑模控制不仅能使磁悬浮球达到稳定悬浮状态,且系统有较好的跟踪特性。
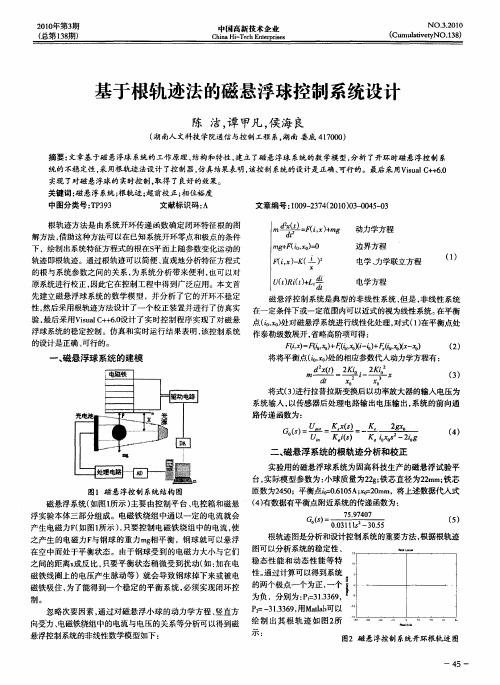
2 系统的数学模型磁悬浮球系统的控制结构如图1所示。
图1 磁悬浮球系统控制结构图中,m为钢球质量,g为重力加速度,x为钢球质心和电磁铁磁极之间的距离,f为电磁力,u 为外部电路提供的控制电压,u x 为钢球位置对应的传感器输出电压。
忽略其他外界干扰因素的影响,在竖直方向上,小球受到电磁吸引力(),F i x 和自身重力mg 的影响。
磁悬浮系统模型理论分析项目名称物体悬浮演示仪的研制项目负责人联系电挂靠单位学号专业班级指导教师职称E-mail申请日期______2013年04月04日 ____起止年月 2013.4~2014.4中国石油大学(北京)磁悬浮系统模型理论分析1.课题背景利用磁力使物体处于无接触悬浮状态的设想是人类一个古老的梦。
但实现起来并不容易。
因为磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术(高新技术)。
随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。
目前国内外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。
它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国内外学者和企业界人士都对其倾注了极大的兴趣和研究热情。
2.研究目的①磁悬浮的工作原理和演示仪的演示②熟悉磁悬浮球控制系统的工作原理。
③分析磁悬浮球控制系统的稳定性。
3.模型建立与理论分析磁悬浮系统的基本结构磁悬浮控制系统主要由铁心、线圈、传感器、控制器、功率放大器及其控制对象刚体等元件组成。
系统结构如图3-1所示。
图3-1 磁悬浮系统结构图Figure3-1 Structure diagram of magnetic levitation system磁悬浮系统的工作原理磁悬浮系统是利用电磁力来控制刚体悬浮的空间位置。
其工作原理是控制电磁铁绕组的电流,产生与刚体重量等价的电磁力,使得刚体稳定悬浮在平衡位置。
由于电磁力与悬浮气隙间存在非线性反比关系,这种平衡并不稳定,一旦受到外界干扰(如电压脉动或者风),刚体就会掉下来或被吸上去,因此必须实行闭环控制。
采用位置传感器在线获取刚体位置信号,控制器对位移信号进行处理产生控制信号,功率放大器根据控制信号产生所需电流并送往电磁铁,电磁铁产生相应磁力克服重力使得刚体稳定在平衡点附近。
声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
学生签名:年月日新疆大学毕业论文(设计)任务书班级:自动化081 姓名:论文(设计)题目:磁悬浮球系统的建模与仿真设计专题:要求完成的内容: 1. 学习系统建模方法和熟练MATLAB语言。
2. 熟悉磁悬浮球控制系统的工作原理。
3. 建立磁悬浮球控制系统的数学模型。
4. 分析磁悬浮球控制系统的稳定性。
5. 磁悬浮球控制系统的控制器(PID,模糊)的设计。
6. 用SIMULINK建模进行仿真实验进行分析。
7. 编写毕业设计说明书。
发题日期:年月日完成日期:年月日实习实训单位:地点:论文页数:页;图纸张数:指导教师:教研室主任:院长:摘要磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。
随着电子技术、控制工程、处理信号元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。
本实验平台可以使用多种控制器和控制方法,适用于相关人员的研究和实验工作。
研究和设计磁悬浮球控制系统实验平台是本文的主要工作,本文在分析磁悬浮球控制系统工作原理的基础上,设计了一套磁悬浮球控制系统实验平台。
本文着重介绍控制器的设计过程。
在此基础上,本文利用了MATLAB设计了基于计算机的磁悬浮PID传统控制和模糊PID控制器。
所研制的控制器软件设计方法简单、性能稳定、实时调试方便。
关键词:磁悬浮球控制系统;稳定性;传统PID控制器;模糊PID控制器ABSTRACTMagnetic Suspension is one of typical mechanics and electronics technology,which includes the electromagnetics, electron technology, control engineering, signaldisposal, mechanics and dynamics.As the electronic technology, control engineering, processing signal components, electromagnetic theory and the development of new electromagnetic material and the progress of the rotor dynamics, maglev technology got rapid progress. This experiment platform can use a variety of controller and the control method, apply to relevant personnel of research and experimental work.This thesis focuses on the research and design of Magnetic Suspension ball Control System testing platform. Based on analyzing of Magnetic Suspension ball Control system's working principle, the thesis designs a Magnetic Suspension ball Control System testing platform.The paper emphasizes the design process.On this basis, this paper use based on MATLAB design of magnetic levitation PID traditional computer control and fuzzy PID controller. The developed controller software design method is simple, stable performance, real-time debugging is convenient.Keywords: maglev ball control system;stability;the traditional PID controller;the fuzzy PID controller目录1 绪论 (5)1.1 磁悬浮技术综述 (5)1.1.1 前言 (5)1.1.2 磁悬浮方式的分类 (5)1.1.3 磁悬浮控制方法的现状与发展趋势 (5)1.2 课题的提出及意义 (6)1.3 本论文的工作及主要内容 (6)2 磁悬浮球系统组成及系统模型 (8)2.1 磁悬浮球系统组成 (8)2.2 磁悬浮球系统工作原理 (8)2.3 磁悬浮球系统的数学模型 (8)2.4 磁悬浮球系统闭环控制 (12)3 传统控制器的研究与设计 (13)3.1 引言 (13)3.2 控制器设计 (13)3.2.1 PID控制器基本控制规律 (13)3.2.1.1 比例控制器(P调节器) (13)3.2.1.2 积分控制器(I调节器) (14)3.2.1.3 微分控制器(D调节器) (15)3.2.1.4 比例-微分控制器(PD调节器) (15)3.2.1.5 比例-积分控制器(PI调节器) (16)3.2.1.6 比例-积分-微分控制器(PID调节器) (17)3.2.2 PID控制器的参数整定 (19)3.2.3 PID调节器参数的工程整定 (21)3.2.3.1工程实验法整定 (21)3.2.3.2 Ziegler-Nichols参数整定法 (22)3.3 磁悬浮球系统PID参数整定及系统仿真 (24)3.3.1 不加控制器时磁悬浮球系统及其系统仿真 (24)3.3.2 PID参数整定的步骤及系统仿真 (28)4 模糊PID控制器的设计 (32)4.1引言 (32)4.2模糊控制器简介 (32)4.2.1模糊控制的基本原理 (32)4.2.2 模糊控制器的结构 (32)4.3 模糊控制系统的设计 (34)4.3.1 模糊控制器的结构设计 (34)4.3.2 模糊控制器的基本设计 (35)4.3.3 模糊PID控制器结构及参数自整定原则 (36)4.3.4 模糊PID控制器的设计 (37)4.3.5 基于MATLAB的模糊PID控制系统的仿真研究 (39)5 总结与展望 (42)5.1总结 (42)5.2 今后的研究方向 (42)致谢 (43)1 绪论1.1 磁悬浮技术综述1.1.1 前言磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
磁悬浮的作用是利用磁场力使一物体沿着或绕着某一基准框架的一轴或几轴保持固定位置。
由于悬浮体和支撑之间没有任何接触,克服了由摩擦带来的能量消耗和速度限制,具有寿命长、能耗低、无污染、无噪声、不受任何速度限制、安全可靠等优点,因此目前世界各国己广泛开展磁悬浮控制系统的研究。
随着控制理论的不断完善和发展,采用先进的控制方法对磁悬浮系统进行的控制和设计,使系统具有更好的鲁棒性。
随着电子技术的发展,特别是电子计算机的发展,带来了磁悬浮控制系统向智能化方向的快速发展。
目前,关于磁悬浮技术的研究与开发在国内外都处于快速发展之中。
磁悬浮技术从原理上来说不难以理解,但是真正将其产业化却是近几年才开始的。
1.1.2 磁悬浮方式的分类一般而言,磁悬浮可分为以下3种主要的应用方式:(1)电磁吸引控制悬浮方式。
这种控制方式利用了导磁材料与电磁铁之间的吸力,几乎绝大部分磁悬浮技术采用该技术。
虽然原理上这种吸引力是一种不稳定的力,但通过控制电磁铁电流的大小,可以将悬浮气隙保持在一定数值上。
随着现代控制理论的发展和驱动元器件高性能、低价格化,该方式得到了广泛应用。
在此基础上也有研究人员提出了把需要大电流励磁的电磁铁部分替换成可控型永久磁铁的方案,并深入的进行了研究和开发工作。
该方案可以大幅度的降低励磁损耗,甚至在额定悬浮高度时不需要能量,是一种非常值得注目的新技术。
(2)永久磁铁斥力悬浮方式。
这种控制方式利用永久磁体间的斥力,一般产生斥力为肚g/cm2,所以被称为永久磁体斥力悬浮方式。
当然,根据所用的磁材料的不同,其产生的斥力相应变化。
但是,由于横向位移的不稳定因素,需要从力学角度来安排磁铁的位置。
近年来出现了一些该方式的产品,例如日本1994年4月公布的专利中,就有关于陔方式配置方案的内容。
随着稀土材料的普及,该方式将会被更多的应用到各个领域。
(3)感应斥力方式。
这种控制方式利用了磁铁或励磁线圈和短路线圈之间的斥力,简称感应斥力方式。
为了得到斥力,励磁线圈和短路线圈之间必须有相对的运动。
这种方式主要应用于超导磁悬浮列车的悬浮装置上。
‘但是,在低速时由于得不到足够的悬浮力,在低速或停止时需要有车轮来支撑车身。
从原理上而言,该方式很少被应用于低速传动机构。
1.1.3 磁悬浮控制方法的现状与发展趋势就目前工业应用角度而言,在各种磁悬浮实现方法中,电磁吸引控制悬浮方式占主体地位。
电磁吸引控制悬浮方式的控制方法是其技术的核心,控制器的性能直接决定了悬浮体的性能指标,例如精度、刚度、阻尼特性、抗干扰能力等。
所以在这类磁悬浮产品的设计中,高性能控制器的研究与设计成为生产高品质磁悬浮产品的关键。
以上问题都对磁悬浮的控制器提出了很高的要求,要提高控制器的性能,就需要对控制方法做大量的研究。
近年来,一些先进的现代控制理论方法在磁悬浮轴承上应用的研究也逐渐开展起来,但因为磁悬浮系统的参数不确定性和非线性使得一些现代控制算法如最优控制无法达到预期的控制精度。
同时,由于磁悬浮系统对控制的实时性要求很高,相对复杂的控制算法就无法在工程上实现。
传统的工业控制较多采用应用成熟的PID 控制器,通过对参数的选取,还可构成PI、PD 控制器,PID 控制器结构简单,调节方便,应用成熟,但是在高精度的磁悬浮技术中,由于系统的复杂性和磁场本身的非线性使得传统的PID控制器不能完全满足工程需要。
近年来,随着工业水平的提高,很多先进控制方法如非线性控制、智能控制、最优控制及系统辨识等方法开始应用到自动化领域。
1.2 课题的提出及意义随着控制理论的发展以及对磁悬浮系统性能要求的不断提高,磁悬浮系统控制器需要实现的控制算法的复杂程度日渐加大。