磁悬浮小球的PID控制
- 格式:doc
- 大小:966.50 KB
- 文档页数:50
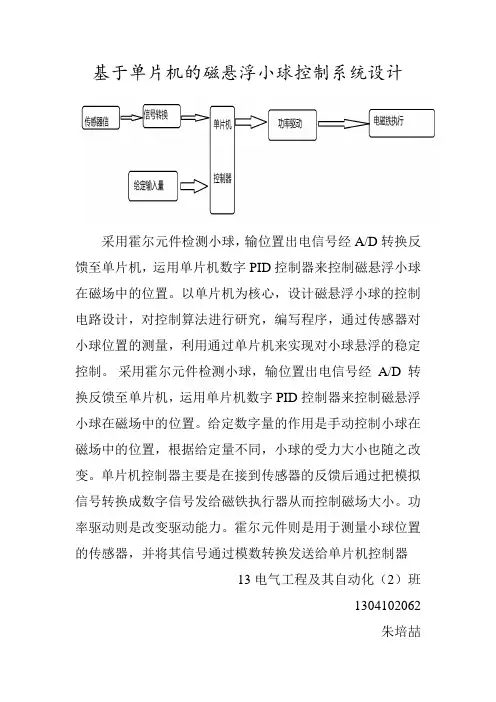
基于单片机的磁悬浮小球控制系统设计
采用霍尔元件检测小球,输位置出电信号经A/D转换反馈至单片机,运用单片机数字PID控制器来控制磁悬浮小球在磁场中的位置。
以单片机为核心,设计磁悬浮小球的控制电路设计,对控制算法进行研究,编写程序,通过传感器对小球位置的测量,利用通过单片机来实现对小球悬浮的稳定控制。
采用霍尔元件检测小球,输位置出电信号经A/D转换反馈至单片机,运用单片机数字PID控制器来控制磁悬浮小球在磁场中的位置。
给定数字量的作用是手动控制小球在磁场中的位置,根据给定量不同,小球的受力大小也随之改变。
单片机控制器主要是在接到传感器的反馈后通过把模拟信号转换成数字信号发给磁铁执行器从而控制磁场大小。
功率驱动则是改变驱动能力。
霍尔元件则是用于测量小球位置的传感器,并将其信号通过模数转换发送给单片机控制器
13电气工程及其自动化(2)班
1304102062
朱培喆。

《Matlab仿真技术》设计报告题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化11**班学号 2学生姓名 **指导教师**学院名称电气信息工程学院完成日期: 2014年 5 月 7 日磁悬浮系统建模及其PID控制器设计Magnetic levitation system base don PID controller simulation摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业与生命科学等高科技领域有着广泛得应用背景。
随着磁悬浮技术得广泛应用,对磁悬浮系统得控制已成为首要问题。
本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理得基础上,建立磁悬浮控制系统得数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好得控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作得重点进行了思考,提出了自己得见解。
PID控制器自产生以来,一直就是工业生产过程中应用最广、也就是最成熟得控制器。
目前大多数工业控制器都就是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还就是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真一、磁悬浮技术简介1、概述:磁悬浮就是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮得平衡状态,磁悬浮瞧起来简单,但就是具体磁悬浮悬浮特性得实现却经历了一个漫长得岁月。
由于磁悬浮技术原理就是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体得典型得机电一体化高新技术。
伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料得发展与转子动力学得进一步得研究,磁悬浮随之解开了其神秘一方面。
1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营得若干猜想--也就就是磁悬浮得早期模型。
磁悬浮系统控制算法及实现磁悬浮技术是近年来发展较快的一种交通方式,其具有速度快、运行平稳、能耗低等优势,而磁悬浮系统的控制算法是保证其运行效率和安全的重要组成部分。
本文将介绍磁悬浮系统的控制算法及其实现。
1.磁悬浮系统的基本原理磁悬浮列车由车体、轨道和控制系统三部分组成,车体利用电磁铁和超导磁体产生反向磁场,与轨道之间形成非接触式磁悬浮,实现列车对轨道的悬浮和牵引。
磁悬浮列车的速度控制和位置控制主要由控制系统实现。
磁悬浮系统的控制算法主要有三种:PID控制算法、模糊控制算法和神经网络控制算法。
(1)PID控制算法:PID控制算法是一种经典的控制算法,可以实现对磁悬浮系统的位置和速度进行精确控制。
PID控制器根据实时反馈的位置和速度信息,计算出控制量,调节电流和磁力,实现对车体的位移和速度控制。
(2)模糊控制算法:模糊控制算法是一种基于模糊逻辑的控制算法,可以对复杂系统进行控制。
磁悬浮系统的控制过程中,受到诸多外部干扰,如风力、地震等,模糊控制算法可通过模糊推理技术实现对干扰信号的有效抑制。
(3)神经网络控制算法:神经网络控制算法是一种基于人工神经网络的控制算法,可以对非线性系统进行较为准确的控制。
磁悬浮系统的非线性特性较为显著,神经网络控制算法可通过训练神经网络模型,实现对磁悬浮系统的精确控制。
磁悬浮系统的实现主要包括硬件和软件两个方面。
(1)硬件实现:磁悬浮系统的硬件主要由电磁铁、超导磁体、传感器和控制器等组成。
其中,电磁铁和超导磁体负责实现磁悬浮和牵引,传感器主要用于测量车体的位置和速度等信息,控制器则根据传感器反馈的信息计算控制器并实现对磁悬浮系统的控制。
(2)软件实现:磁悬浮系统的软件实现主要包括控制程序、监控程序和故障处理程序等。
控制程序编写了磁悬浮系统的控制算法,实现对车体位置和速度的精确控制;监控程序则负责监测磁悬浮系统的运行状态,及时发现故障并进行处理;故障处理程序则在系统运行过程中出现故障时进行自动处理,避免对整个系统造成不利影响。
2011届毕业设计(论文)材料系、部: 电气与信息工程系学生姓名: 单能文指导教师: 易杰职称: 高级工程师专业:自动化班级: 0703班学号:4100703172011年6月材料清单1、毕业设计(论文)课题任务书2、毕业设计(论文)开题报告3、中期检查表4、指导教师评阅表5、评阅评语表6、答辩资格审查表7、答辩及最终成绩评定表8、毕业设计(论文)说明书湖南工学院2011届毕业设计(论文)课题任务书系:电气与信息工程系专业:自动化湖南工学院毕业设计(论文)开题报告湖南工学院毕业设计(论文)工作中期检查表湖南工学院2011届毕业设计(论文)指导教师评阅表系:电气与信息工程系专业:自动化湖南工学院毕业设计(论文)评阅评语表湖南工学院毕业设计(论文)答辩资格审查表湖南工学院2011届毕业设计(论文)答辩及最终成绩评定表系:电气与信息工程系专业:自动化2011届毕业设计说明书基于磁悬浮控制系统的PID控制器设计系、部:电气与信息工程系学生姓名:单能文指导教师:易杰职称高级工程师专业:自动化班级:0703班完成时间:2011年5月磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题.本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解.PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。
目前大多数工业控制器都是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
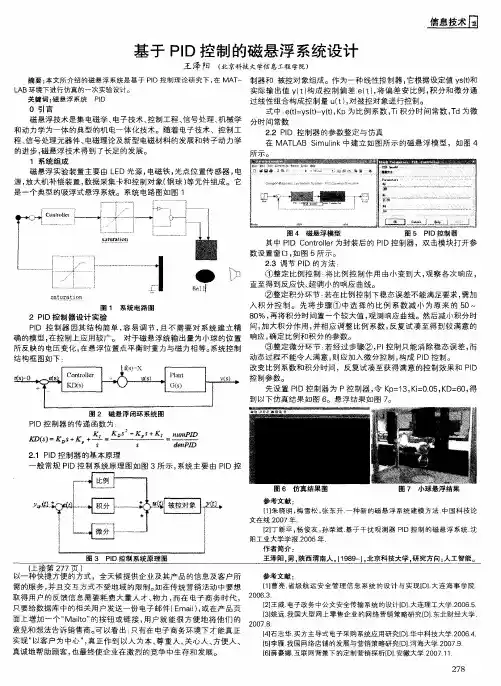
MATLAB课程设计课程名称:采用PID控制器设计磁悬浮小球控制系统学院:电气工程学院学号:P*********姓名:***班级:10级自动化一班指导教师:杨成慧老师目录摘要........................................................11.引言.........................................................22.系统分析与设计..................................... 52.1系统建模及仿真..............................................5 2.2建立磁悬浮小球系统框图....................................72.3 PID控制系统..........................................82.4 仿真结果分析..............................................13 2.5 总结.....................................................132.6 答谢.....................................................133.参考文献.......................................................14摘要:本文通过对一个磁悬浮小球的分析,简单的描述了磁悬浮列车的原理。
控制要求通过调节电流使小球的位置始终保持在平衡位置。
通过对磁悬浮小球系统进行数学建模,求出它的系统传递函数,采用PID算法设计调节器,对小球的稳定性进行了分析和仿真,在MATLAB平台仿真获得适当的PID参数范围,进行频域分析,使得磁悬浮小球系统处在平衡状态,在仿真过程中对PI,PD,及PID三种方式进行了比较和分析,对其加入扰动信号,即正弦扰动信号,观察输出波形,对扰动进行分析。
2011届毕业设计(论文)材料系、部:电气与信息工程系学生姓名:单能文指导教师:易杰职称:高级工程师专业:自动化班级: 0703班学号: 4100703172011年6月材料清单1、毕业设计(论文)课题任务书2、毕业设计(论文)开题报告3、中期检查表4、指导教师评阅表5、评阅评语表6、答辩资格审查表7、答辩及最终成绩评定表8、毕业设计(论文)说明书湖南工学院2011届毕业设计(论文)课题任务书系:电气与信息工程系专业:自动化湖南工学院毕业设计(论文)开题报告湖南工学院毕业设计(论文)工作中期检查表湖南工学院2011届毕业设计(论文)指导教师评阅表系:电气与信息工程系专业:自动化湖南工学院毕业设计(论文)评阅评语表湖南工学院毕业设计(论文)答辩资格审查表湖南工学院2011届毕业设计(论文)答辩及最终成绩评定表系:电气与信息工程系专业:自动化2011届毕业设计说明书基于磁悬浮控制系统的PID控制器设计系、部:电气与信息工程系学生姓名:单能文指导教师:易杰职称高级工程师专业:自动化班级: 0703班完成时间: 2011年5月摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。
本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。
目前大多数工业控制器都是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
毕业设计(论文)题目磁力悬浮系统的PID控制策略设计及仿真学生姓名专业班级电气工程及其自动化学号系(部)指导教师(职称)完成时间目录摘要 (I)ABSTRACT (II)1 绪论 ························································································ - 1 -1.1 磁悬浮技术简介·································································· - 1 -1.2 磁悬浮分类········································································ - 1 -1.3 控制方式分类····································································· - 2 -1.4 磁悬浮技术的应用与展望 ······················································ - 2 -1.5本论文的工作任务及主要内容················································· - 4 -2 磁悬浮球系统数学建模及稳定性分析 ·············································· - 5 -2.1 磁悬浮球系统的基本结构及工作原理 ······································· - 5 -2.2 系统运动方程的推导···························································· - 5 -2.3 磁悬浮球系统稳的定性分析 ··················································· - 7 -2.4 磁悬浮球系统建模······························································· - 8 -3 传统PID控制器设计 ··································································- 11 -3.1 控制方案··········································································- 11 -3.1.1 电流控制器···································································- 11 -3.1.2 电压控制器···································································- 11 -3.2 PID控制器系统的模型建立·················································· - 12 -3.3 PID控制器K、I T、D T这三个参数的选取······························· - 14 -P3.4 PID控制器对磁悬浮球系统控制性能的分析····························· - 15 -3.5 利用MATLAB软件对PID参数进行系统仿真 ····························· - 16 -3.5.1 开环系统仿真 ······························································· - 17 -3.5.2 闭环系统仿真 ······························································· - 17 -3.6 PID参数整定···································································· - 18 - 4模糊PID控制器磁悬浮球控制系统 ················································ - 21 -4.1 模糊控制的基本原理·························································· - 21 -4.2 模糊PID控制器结构·························································· - 21 -4.3 模糊PID的实现································································ - 22 -4.4 PID参数模糊调整规则························································ - 22 -5 MATLAB仿真············································································· - 24 -5.1 模糊PID在MATLAB下的实现 ··············································· - 24 -5.2 磁悬浮系统即时控制及分析 ················································· - 24 - 结束语 ······················································································ - 27 - 致谢 ······················································································ - 28 - 参考文献 ··················································································· - 29 -磁力悬浮系统的PID控制策略设计及仿真摘要磁悬浮技术具有以下优点:无摩擦、无磨损、无需润滑以及寿命较长等。
《Matlab仿真技术》令狐采学设计报告题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化11**班学号201110710247学生姓名**指导教师**学院名称电气信息工程学院完成日期:2014 年 5 月7 日令狐采学创作磁悬浮系统建模及其PID控制器设计Magnetic levitation system based on PID controller simulation摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。
本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。
目前大多数工业控制器都是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真一、磁悬浮技术简介1.概述:磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。
由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。
伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。