汽车网络测试系统
- 格式:docx
- 大小:193.77 KB
- 文档页数:6
汽车CAN网络测试开发方法
一、前言
随着汽车电子技术的发展和对汽车性能要求的提高,汽车上电控单元(ECU, Electronic Control Unit)数量越来越多,各个电控单元之间的交互信息通过CAN、LIN、MOST 总线组成的网络来实现。
因而对整车网络的开发显得尤为必要。
当前整车网络的开发流程一般都是基于国际上通用的V 模式开发流程。
整车网络开发V 模式流程包括以下几个主要方面:网络需求定义、网络规
范制定、网络测试验证。
当前期的网络需求定义以及网络规范制定完成后,就进入后期的网络设计与测试验证阶段,网络测试验证阶段主要是对已经设计出来的样品或产品进行网络测试验证,以确保样品或产品的功能与前期的需求一致。
网络测试验证阶段主要从事网络测试需求分析、网络测试规范制定、网络
测试系统的开发以及网络测试实施、对测试过程中出现问题进行分析等。
二、CAN 网络测试开发流程
整车CAN 网络测试开发流程主要包括以下几个方面:测试计划制订、规范制定、自动化测试系统开发、测试实施以及测试报告总结。
测试计划制订主要考虑网络测试工作所需要的资源需求(工具需求以及人
力需求等)、任务划分、时间需求等,以确保后续的工作能顺利地、有效地开展。
测试规范的制定主要是确定网络需测试内容。
在整个网络开发过程当中,
网络测试规范应在网络需求规范完成后开展。
网络测试的目的是确认供应商提供的ECU 产品是否符合网络需求规范的要求。
正因为如此,CAN 网络测试规。

智能网联汽车无线测试解决方案智能汽车电子系统检测系统的总体构思核心部件测试实验室整车测试实验室外场实验室无线工作环境模型库测试场景和测试标准自主知识产权汽车无线专用测试设备解决方案1:无线传感器综合测评估系统测试计算机及测试软件转台控制器水平转台被测毫米波雷达V2X 无线通信设备屏蔽暗室AU T扫描架及导轨干扰信号天线接收天线RTS 天线USB 功率计UXA 毫米波信号分析仪海量信号记录仪E8707A 雷达目标模拟器UXG/PXG 信号源网络HUB测试对象智能网联汽车的无线传输设备,包含V2X 通信模块,雷达模块,ecall, 导航模块,无线通信模块等测试目的和内容对无线传输设备的性能参数进行完整测试,作为对无线传感器性能评估的基础技术依据。
测试内容基于传感器行业规范或标准进行,主要包含发射参数,频谱参数,接收参数等。
无线传感器典型案例:毫米波雷达测试测试系统功能典型指标测量◆EIRP功率测量◆载波频率◆信号带宽◆带外功率◆波束宽度◆信号录制与分析目标模拟◆静止目标◆运动目标◆BSD场景◆ACC场景主要功能:•毫米波雷达典型技术指标测试,频率、功率等;•雷达目标模拟测试验证,距离、速度、角度、RCS模拟典型场景模拟,如ACC,BSD、雷达干扰测试等;•信号录制与回放;接收性能测试:1)接收机频率范围2)接收频率精度3)接收机灵敏度4)接收机压缩电平5)接收多普勒频率范围6)接收机噪声系数发射性能测试:1)发射信号输出频率2)频率精度3)功率精度4)调制信号周期5)调制信号带宽6)调制线性度系统工作性能:1)雷达作用距离2)雷达响应时间3)雷达抗干扰性能测试点频抗干扰验证同类型信号抗干扰验证气候环境变化验证毫米波雷达综合测试系统测试对象:毫米波雷达测试能力:主要测试参数:测试参考标准:接收性能测试:1)接收机频率范围2)接收频率精度3)接收机灵敏度4)接收机压缩电平5)接收多普勒频率范围6)接收机噪声系数发射性能测试:1)发射信号输出频率2)频率精度3)功率精度4)调制信号周期5)调制信号带宽6)调制线性度7)发射信号频谱杂散系统工作性能:1)雷达作用距离2)雷达响应时间3)雷达抗干扰性能测试点频抗干扰验证同类型信号抗干扰验证气候环境变化验证ETSI StandardsDescriptionReferenceTitleGeneral description ETSI TS 126 267 eCall data transfer; Inband modem solution; General description ANSI-C reference code ETSI TS 126 268 eCall data transfer; In-band modem solution; ANSI-C reference code Conformance testing ETSI TS 126 269 eCall Data Transfer; In-band modem solution; Conformance testing Characterization reportETSI TS 126 969Digital cellular telecommunications system (Phase 2+); Universal Mobile Telecommunications System (UMTS); eCall data transfer; In-band modem solution; Characterization reportHLAP Conformance Testing; Abstract Test Suite (ATS)ETSI TS 103 321Mobile Standards Group (MSG); eCall HLAP Conformance Testing; Abstract Test Suite (ATS) and Protocol Implementation eXtra Information for Testing (PIXIT)Network Access Device Protocol test specification ETSI TS 102 936-1 eCall Network Access Device (NAD) conformance specification; Part 1: Protocol test specificationNetwork Access Device Test SuitesETSI TS 102 936-2eCall Network Access Device (NAD) conformance specification; Part 2: Test SuiteseCall Communication equipmentETSI TR 102 937eCall communications equipment; Conformance to EU vehicle regulations, R&TTE, EMC & LV Directives, and EU regulations for eCall implementation USIMETSI TS 131 102Characteristics of the Universal Subscriber Identity Module (USIM) applicationUMTS abstract test suiteETSI TS 134 123 -3Universal Mobile Telecommunications System (UMTS); User Equipment (UE) N5172B EXG GNSS EmulatorE7515A UXM or 8960(E5515C) Cellular Base Station Emulator with PSAP, Signal Studio and TAP internal to UXMIVS ModuleGNSSModem无线传感器典型案例:ecall 测试无线环境的典型场景UMi Outdoor-to-Indoor Car-to-car 2.3/ 5.25 GHzHighway TunnelMountains Dense Urban无线环境对设备性能的影响MIMOMSDiversityBS解决方案2:外场性能验证和采集系统Trial field area无线设备PALNA发射天线接收天线海量信号采集记录仪UXA 分析仪无线通信综测仪无线信道衰落模拟器测试对象在车载无线设备工作状态下,对设备的工作性能进行动态测试,记录和评估。
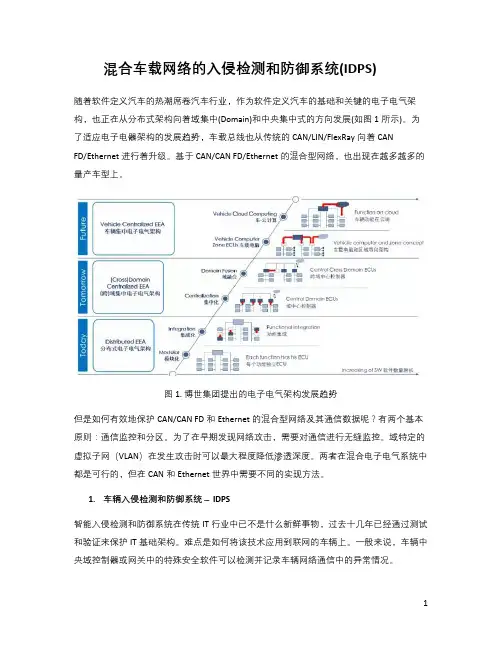
混合车载网络的入侵检测和防御系统(IDPS)随着软件定义汽车的热潮席卷汽车行业,作为软件定义汽车的基础和关键的电子电气架构,也正在从分布式架构向着域集中(Domain)和中央集中式的方向发展(如图1所示)。
为了适应电子电器架构的发展趋势,车载总线也从传统的CAN/LIN/FlexRay向着CANFD/Ethernet进行着升级。
基于CAN/CAN FD/Ethernet的混合型网络,也出现在越多越多的量产车型上。
图1. 博世集团提出的电子电气架构发展趋势但是如何有效地保护CAN/CAN FD和Ethernet的混合型网络及其通信数据呢?有两个基本原则:通信监控和分区。
为了在早期发现网络攻击,需要对通信进行无缝监控。
域特定的虚拟子网(VLAN)在发生攻击时可以最大程度降低渗透深度。
两者在混合电子电气系统中都是可行的,但在CAN和Ethernet世界中需要不同的实现方法。
1.车辆入侵检测和防御系统– IDPS智能入侵检测和防御系统在传统IT行业中已不是什么新鲜事物,过去十几年已经通过测试和验证来保护IT基础架构。
难点是如何将该技术应用到联网的车辆上。
一般来说,车辆中央域控制器或网关中的特殊安全软件可以检测并记录车辆网络通信中的异常情况。
图2. CAN/CAN FD IDS可以检测周期性和事件性消息中的异常以及诊断要求的滥用如图2所示,发生攻击时,IDPS会发起五步防御。
如果攻击遵循已知模式,则嵌入式防火墙CycurGATE将立即阻止对ECU的访问。
但是,为了阻止未来的攻击,已建立的规则集(黑名单和白名单)也必须不断更新 - 这正是IDPS的本质。
第二步,通过基于CAN/CAN FD总线的入侵检测软件CycurIDS识别以前未知攻击类型的异常和迹象,包括监视数据流量。
第三步存储记录在车辆中的任何异常,可手动或自动将它们传输到基于云的事件数据库中,以加快响应速度。
在该数据库中,可以汇总所有制造商连接的车辆的报告,并将报告的异常与已知攻击的指纹进行比较。
车辆平台化CAN网络测试方案简介CAN(Controller Area Network)是一种面向实时应用通信的串行通信协议。
汽车电子控制单元(ECU)之间的通信使用CAN标准,以便在车辆上进行数据传输。
随着汽车电子技术的发展,车辆变得更加智能化和数字化。
车辆中的ECU数量也越来越多,需要进行网络测试以保证车辆的安全和可靠性。
本文介绍了车辆平台化CAN网络测试方案,以帮助车辆制造商和测试人员更好地进行车辆的网络测试。
CAN网络测试的意义在车辆中,不同的ECU之间需要进行通信以协调车辆的运行。
例如,发动机控制单元可以监测发动机的性能,并根据需要调整发动机的运行状态。
其中的通信使用CAN标准进行。
CAN网络测试可以确保ECU之间的通信正常,以确保车辆的正常运行。
此外,由于车辆的复杂性和多样性,进行网络测试可以检测潜在的问题,避免在发生故障时需要进行昂贵的维修工作。
CAN网络测试方案车辆平台化CAN网络测试方案包括以下步骤:步骤一:需求分析在进行CAN网络测试之前,需要明确测试的目标和需求。
例如,测试人员需要测试CAN总线上的数据传输性能、消息传递时间、错误处理等。
在这个阶段,也需要确定测试的工具和方法。
步骤二:测试用例设计测试用例设计是对需求的具体化过程。
测试用例必须覆盖所有的要求,包括正常情况和异常情况。
测试用例应该根据功能和性能分析进行设计,以保证测试的完整性和准确性。
步骤三:测试环境搭建测试环境需要包括CAN总线和测试工具。
CAN总线是连接ECU的物理介质,测试工具包括CAN信号发生器、CAN分析器和数据记录器等。
步骤四:测试执行测试执行是测试用例应用到测试环境中的过程。
测试人员需要按照测试用例进行测试,并记录测试结果。
对于测试失败的用例,需要对问题进行分析和排除。
步骤五:测试报告测试报告是对测试结果的一份总结。
测试报告应该包含测试目的、测试方法、测试结果和结论。
测试报告还应该提供测试过程中的问题和建议。
车载测试中的车辆网络通信测试解析在当今社会,车载通信技术已成为汽车行业的重要发展方向。
车辆网络通信测试作为车载测试的重要环节,对于保证车辆通信系统的可靠性和安全性具有不可忽视的作用。
本文将从测试目的、测试内容、测试方法和测试技术四个方面对车辆网络通信测试进行深入解析。
一、测试目的车辆网络通信测试的主要目的是保证车辆通信系统的性能稳定、数据传输可靠以及网络安全。
通过测试评估,能够发现和解决网络通信中的问题,提高车辆网络系统的质量和可用性。
二、测试内容车辆网络通信测试内容包括数据传输速率测试、网络延时测试、数据可靠性测试以及网络安全测试。
1.数据传输速率测试数据传输速率测试主要针对车辆通信系统的传输速率进行评估。
通过发送不同大小的数据包,测试数据的传输时间,进而评估车辆通信系统的传输速率是否符合设计要求。
2.网络延时测试网络延时测试旨在评估车辆通信系统的数据传输延时。
通过发送和接收时间戳数据,测试数据的传输延时,以确定车辆通信系统的网络延时是否满足实时通信的需求。
3.数据可靠性测试数据可靠性测试主要检验车辆通信系统在数据传输过程中是否存在丢包、错包等问题。
通过发送大量测试数据,观察数据的传输是否完整,以评估车辆通信系统的数据可靠性。
4.网络安全测试网络安全测试是为了保证车辆通信系统的信息安全。
通过模拟黑客攻击、数据篡改等情况,测试车辆通信系统的安全性能,确保车辆网络通信不受恶意攻击和数据泄露的威胁。
三、测试方法车辆网络通信测试主要采用实验室测试和实地测试相结合的方法。
1.实验室测试通过构建车辆网络通信系统的实验环境,在实验室中进行相关测试。
该测试方法具有灵活性和可控性,能够模拟多种场景并快速获取测试结果。
2.实地测试将车辆网络通信系统安装在实际的车辆上进行测试,以模拟真实环境下的网络通信情况。
该测试方法能够真实反映车辆通信系统在实际使用中的性能和稳定性。
四、测试技术车辆网络通信测试中常用的技术包括CAN总线测试、Ethernet测试、无线通信测试和网络安全测试。

CAN网络系统测试应用CAN(Controller Area Network)网络是一种常见的实时控制总线系统,广泛应用于汽车、航空、军事等领域。
CAN网络系统测试是确保CAN网络计算机网络的可靠性和稳定性的关键环节,本文主要介绍CAN网络系统测试的应用。
CAN网络系统测试可以检测和诊断CAN总线上的错误和故障,如位值错误、传输错误、总线冲突等问题,确保CAN总线的稳定性和可靠性。
CAN测试被广泛应用于汽车和工业控制领域,可以通过测试保证系统在各种 environmental conditions 下的稳定性,同时也可以提高系统的可控性和可管理性。
CAN系统测试技术的应用包括硬件测试和软件测试两个方面。
硬件测试主要涉及CAN控制器、CAN终端、CAN节点等设备,可以通过各种测试方法测试它们的性能和可靠性,包括电气特性测试、工作温度测试、抗干扰能力测试等。
对于软件测试来说,主要涉及CAN总线协议栈、应用程序或驱动程序等,可以通过对系统进行各种测试,比如环境测试、负载测试、安全性测试等,以确保系统在实际应用中的可靠性和稳定性。
在CAN网络系统测试中,需要使用各种测试工具和软件来进行测试。
一些流行的测试工具和软件包括CANoe和CANalyzer。
CANoe 是一种用于测试和仿真 CAN 系统的多功能测试工具,可用于开发和测试各种 CAN 系统,包括 EB 汽车电子系统、工业自动化、航空航天等领域。
CANalyzer 是一种全面的 CAN 总线分析解决方案,可用于捕获、存储、分析和显示 CAN 信息,以帮助用户更好地了解车辆和工控系统的运行情况,从而确保其性能和可靠性。
除此之外,还有一些开源的CAN工具引擎,例如can-utils,这个工具可以支持CAN工具的大量操作,并提供一些实用的平台设备接口和样例代码。
此外,还有一些支持性测试工具,包括 CAN stress testing 工具和 CAN sniffing 工具,都可以在测试CAN网络系统时发挥重要作用。
汽车ids设计原理概述汽车IDS(Intrusion Detection System,入侵检测系统)是一种主动安全技术,旨在检测和防止汽车网络系统中的攻击。
随着汽车系统的智能化和互联化程度的不断提高,汽车IDS已成为汽车安全领域中的热门研究方向之一。
本文将介绍汽车IDS的设计原理和实现方法。
设计原理汽车IDS的基本设计原理是通过对汽车网络中不同层次的流量进行监测和分析,识别出异常流量并进行处理,从而实现对汽车网络安全的保护。
汽车网络可以分为控制区域网络(CAN)和实时操作系统(RTOS)网络。
基于不同类型的汽车IDS也可以分为基于CAN的IDS和基于RTOS的IDS。
基于CAN的IDS基于CAN的IDS主要关注针对CAN总线的攻击。
在汽车CAN总线中,所有的电子控制单元(ECU)都连接到总线上,通过传递消息进行通信。
CAN总线基本上是一个开放的总线,任何ECU都可以发送消息到总线上。
这样的结构使得总线容易被攻击。
基于CAN的IDS的设计过程中,可以采用如下步骤:1. 监控CAN总线上的数据流,并收集CAN帧信息。
2. 根据CAN通信数据的规律,确定正常的通信模式,并设置相应的安全策略。
3. 对CAN总线上的所有数据进行分析,并识别出可能的攻击。
4. 一旦发现攻击,IDS会发出警告信息,同时启动相应的应对措施。
基于RTOS的IDS基于RTOS的IDS主要用于检测攻击对汽车RTOS网络的影响。
汽车RTOS网络包括多个ECU之间的通信,其中每个ECU都运行一个RTOS操作系统。
攻击者可以利用优先级反演(Priority Inversion,PI)等漏洞,影响系统的通信过程。
基于RTOS的IDS的设计过程分如下步骤:1. 监控RTOS网络流量,收集RTOS消息及其属性信息。
2. 根据消息反馈回来的时间延迟和其他信息,确定正常的通信模式,并设置相应的安全策略。
3. 对RTOS网络中的消息进行分析,以便检测不安全的消息和恶意代码。
汽车CAN/LIN总线测试流程和测试工具解析汽车CAN/LIN总线系统测试的关键是测试流程、测试标准和测试工具,掌握专业的总线分析和测试工具的使用技术,开发测试软件并将它们应用到测试过程是对中国汽车厂家和汽车工程师的重大挑战,本文介绍CAN/LIN总线设计、仿真、分析和测试工具.恒润提供CAN/LIN总线测试方案和在这些工具平台之上的测试软件开发咨询服务,帮助客户进行CAN/LIN总线方面的测试.这些工具包括用于CAN/LIN网络系统和电控单元仿真和测试的工具CANoe;记录、评价CAN总线信号电平的工具CANscope;CAN总线干扰生成工具CANstress;CAN总线数据记录器CANlog。
汽车总线测试流程概括的讲,汽车总线的测试流程主要包括四个阶段:1。
制订测试计划。
制订测试计划是测试开始前必须的工作,包括了测试需要达到的目标,使用的资源、遵从的标准以及工具等方方面面,是测试顺利实施的指导性文件.主要内容有:目标;总体测试策略;测试的完整性需求;具体规则(如何时停止测试);资源需求;职责(如测试用例设计,执行,检查);测试用例库;测试标准;工具(CANoe,CANscope,CANstress, CANlog);测试软/硬件配置;系统集成计划。
2。
测试用例。
测试用例的设计是一项复杂的工作,既需要直觉又需要专门技术。
3. 测试向量。
包括测试向量和分解每一个测试用例。
4. 测试过程。
经过授权的专业人员系统地执行测试。
测试步骤如下:1).单元测试(White Box,Glass Box, check code correctness;2).集成测试(Bottom Up,Top Down,Big Bang,Sandwich;3).功能测(BlackBox,perspecification,component。
测试工具主要包括软件测试环境和和辅助的硬件测试工具两部分.软件测试环境在汽车总线网络开发和测试过程中,主要应用的软件测试环境是CANoe。
TSN(时间敏感网络)测试、仿真、分析平台应用攻略前言在汽车领域,近几年车内网络通讯方式的变革诉求,期望能够有更高的数据传输速率,以及保证实时性的通讯方式引入。
例如对于ADAS而言,传统的CAN 总线已经远远不能满足其对通讯的要求,而基于车载以太网的TSN网络是一个更好的解决方案,它在保证传输带宽的同时,也保证了数据的时序、极低延时和可靠性。
TSN 验证及测试环境概述德国TSN Systems公司提供了用于TSN 测量和分析的软件工具TSN tools 以及硬件工具TSN Box,利用TSN Tools以及TSN Box,可以快速构建一个支持TSN 的验证及测试网络环境,这个环境具有高度的灵活性,可以被用来匹配多种TSN 应用的场景,用于开发、分析、测试TSN 技术相关的内容。
图1 TSN 验证及测试环境应用场景示意图TSN Systems 提供的TSN 验证及测试环境主要侧重于以下内容:•802.1AS gPTP•802.1 Qav•IEEE 1722•IEEE 1733/RTP•802.1 Qbv•802.1 Q/Best Effort Traffic•CAN总线/车载以太网网关•交换机性能及队列大小分析•多种信号共存的网络行为分析•网络抖动(Jitter)及负载分析TSN应用场景Talker/Listener 模拟仿真在AVB/TSN 开发过程中,为了构建开发环境,为产品的开发人员提供一个可以按照条件设定的TSN/AVB 的发送和接收节点,需要模拟TSN Talker/Listener节点,这时可以使用TSN Box 完成这个任务。
•可直接加载影视频文件,将音视频实时转换为IEEE 1722/IEEE 1733 数据流•可直接接受音源输入,并将音源转换为IEEE 1722/IEEE 1733 数据流•可在数据文件中对需要传输的信号进行预定义,上传至TSN Box 并设定整形算法,TSN Box 可以按照预先设定的方式生成对应的数据流•可作为Listener接收IEEE 1722/IEEE 1733 音频数据流,解析并将其转换至音频模拟信号,直接输出至播放设备•可接收数据,增加时间戳,并将其转发至上位机进行时间特性分析TSN Box支持以下协议和整形方式:•IEEE 802.1AS (gPTP)o PPS signal•IEEE 802.1Qavo IEEE 1722 Audio file player with live adapted PTP time stampingo IEEE 1733/RTP/RTCP File player with live adaptedPTP time stamping •802.1Qbvo 1ms cycle timeo100 µs cycle time•IEEE 802.1Q/Best Effort Traffico UDP trafficTAP设备由于车载以太网通讯机制属于包转发网络,无法按照传统CAN 总线的监控方式来观测网络,如果我们在开发过程中或者分析测试过程中需要监控车载以太网的通讯过程和相关数据,则需要采用TAP 的模式在通讯链路上插入观测点。
汽车CAN网络测试开发方法随着汽车电子化水平的不断提高,汽车网络系统的开发和测试变得越来越复杂。
汽车CAN(Controller Area Network)网络是一种用于车辆内部通信的网络协议,用于传输各个电子控制单元(ECU)之间的信息。
在汽车CAN网络测试开发中,我们需要采用一些方法来保证系统的可靠性和稳定性。
本文将介绍一种汽车CAN网络测试开发的方法。
首先,我们需要建立一个完整的测试环境。
这包括搭建车辆仿真平台和CAN网络测试工具。
车辆仿真平台包括车辆硬件和软件模拟器,用于模拟真实的汽车环境。
CAN网络测试工具用于监控和分析CAN总线上的数据通信。
在这个测试环境中,我们可以进行各种测试活动,包括功能验证、性能测试和可靠性测试等。
接下来,我们需要制定测试用例。
测试用例是一组针对不同功能和性能方面的测试步骤。
我们可以根据汽车的功能需求和设计规范,设计相应的测试用例。
例如,对于车辆的制动系统,我们可以设计测试用例来验证制动灯的检测和响应时间等。
通过制定测试用例,可以有效地测试和验证汽车CAN网络的功能和性能。
然后,我们需要进行测试执行。
测试执行是指按照测试用例进行测试的过程。
在测试执行时,我们需要使用CAN网络测试工具来监控CAN总线上的数据通信,并进行相应的测试记录和分析。
通过测试执行,可以发现各种潜在的问题和缺陷,并及时进行修复和改进,以保证汽车CAN网络系统的可靠性和稳定性。
测试执行后,我们需要进行测试评估。
测试评估是对测试结果进行综合评估和分析的过程。
通过测试评估,我们可以了解各个功能和性能方面的测试结果,并针对测试结果进行相应的优化和改进。
同时,我们还可以对测试结果进行定量分析,以评估系统的可靠性和稳定性。
最后,我们需要进行测试报告和文档编写。
测试报告和文档编写是对测试过程和结果进行总结和记录的过程。
测试报告包括测试目的、测试方法、测试结果和测试建议等。
通过测试报告和文档编写,可以为汽车CAN 网络的后续开发和测试提供参考和指导。
汽车网络测试系统
如果说车载以太网代表了汽车电子科技的 “新兴力量 “,那么 CAN/LIN 网络无疑是属于 “传 统”的那一方。
虽然近两年车载以太网正以雨后春笋般的速度发展, 可久经考验的传统网络 技术也在展现着它独有的魅力。
为了充分发挥它们的光和热, 针对网络协议的测试技术也依 旧任重而道远。
Rain Sensor
LIN
15765-x 、ISO 14229 等。
Diag Tool
L N
BCM C A
N Comfort Infotainment
传统网络技术的国际标准协议, 也伴随着实际应用需求不断的迭代更新, 目前协议体系较为 成熟的有 ISO 11898-x x :子协议编号)
、SAEJ1939-x 、ISO LIN 2.x 、 SAE J2602-x 、ISO Diagnostic s
CAN
网络自动化测试系统核心功能为 CAN/LIN 网络基本通信测试、 OSEK/AUTOSAR 网络管理测试、 UDS on X ( X:网络类型)诊断协议测试、网关路由功能测试、BootLoader on X 在线刷写测试。
系统采用了 Vector 工具链,自动化测试软件为 Vector CANoe ,可根据测试需求选择不同的网络协议选项包,例如 option LIN 、option J1939 等; CANoe 的 Test Module 提供了测试用例 Script 的开发环境,应用 CAPL 语言编辑 Script 相关内容,系统内所有的测试设
备均可通过 CANoe 进行远程访问及控制。
测试不同协议时都需要添加不同CMX(通信矩阵 Communication Matrix )的数据库文
件。
自动化执行硬件采用了 Vector VT System ,从而实现系统中各测试设备的协同工作,以及
真实 CAN 信号线的短路故障注入。
网络干扰仪已从传统的 CANstress DR 升级为支持 CANFD 网络干扰的 VH6501 ,对 CAN/CANFD Message 进行 Bit field disturbance 干扰和 Analog disturbance ,ECU 供电电源 KL30 、KL15 的信号模拟和网络物理层信号采用Keysight 可编程电源及高精度网络
示波器进行仿真和采集。
测试系统的规格有两种:部件级和系统级。
同样配置的机柜可以根据需求作为部件级测试系统使用,当然也可以结合测试台架执行系统级测试。
Test Tools Drawer 测试工具抽屉
Touchscreen Panel 触摸屏面
板
Programmable Power Supply 程控电源
Power Distribution and Fusion Unit 供电分配及保护
单元
Bus
Oscilloscope
总线示波器
Automatic Control
Boards
自动化控制板卡
网络自动化测试系统可覆盖测试类型及内容ECU Test Interfaces 控制器测试接口
Device Under Test
Drawer
被测控制器抽屉
Host
Computer
控制主机
CAN Network COM LIN Network COM 物理层测试 数据链路层测试 交互层测试 容错性测试 物理层测试 数据链
路层测试 调度表测试 睡眠唤醒测试
定时参数测试 状态转换测试
睡眠唤醒测试
无论是新型车载网络 Ethernet ,还是传统车载网络 CAN/LIN ,都包含网络设计 EE (电子 电气架构)和网络测试 VV (测试与验证)两个方面。
车载网络设计和网络测试技术,就像 一对欢喜冤家,既要相互陪伴成长,又要相互包容,纠正各自所犯的错误,并且,它们作为 智能互联、 无人驾驶、新型信息娱乐系统等未来汽车功能实现的依托, 只有默契配合, 才能 适应汽车工业的进程,而一直走下去。
通信相关诊断测
试
传输层测试
网关路由一致性测试
网络层测试
网关路由功能测试
应用层测试
OSEK/AUTOASR NM。