大学理论力学__空间力系的平衡方程
- 格式:ppt
- 大小:3.65 MB
- 文档页数:25

基础部分——静力学第3 章力系的平衡主要内容:§3-7 重心即:力系平衡的充分必要条件是,力系的主矢和对任一点3-2-1 平衡方程的一般形式∑=iF F R ∑=)(i O O F M M 已知∑=iF F R ∑=)(i O O F M M 投影式:平衡方程i即:力系中所有力在各坐标轴上投影的代数和分别等于零;所有力对各坐标轴之矩的代数和分别等于零。
说明:¾一般¾6个3个投影式,3个力矩式;¾一般形式基本形式3-2-2 平面一般力系的平衡方程xy zOF1F2Fn平面内,¾一般形式¾3个2个投影式,1个力矩式;¾ABAzzCC附加条件:不垂直附加条件:不共线Bx二矩式的证明必要性充分性合力平衡AA 点。
B 点。
过ABBx故必有合力为零,力系平衡证毕平面问题3个3个 解题思路BAMFo45l l[例3-1] 悬臂梁,2解:M A 校核:0)(=∑F MB满足!解题思路?AyF AxF[例3-2] 伸臂梁F AxF AyF BF q 解:0=∑x F 0)(=∑F AM3(F −+0=∑yF3(F −+(F −+0)(=∑F AM=∑yF0=∑x F F AxF AyF BF q 思考:如何用其他形式的平衡方程来求解?0=∑x F 3(F −+0)(=∑F AMF AxF F BF q 0)(=∑F BM(F −+二矩式思考练习][练习FFlll F ACB DlllACB DM=F l[思考][思考]lll F ACB DlllACB DF见书P54例3-1—约束lllACB DF—约束CBADEFM—约束—约束—整体平衡局部平衡CB ADEFM研究对象的选取原则¾仅取整体或某个局部,无法求解;¾一般先分析整体,后考虑局部;¾尽量做到一个方程解一个未知力。
qCBAm2m2m2m2MBCM[例3-3] 多跨梁,求:如何选取研究对象?F CqF CFAxF AyM ABAqF'BxF'ByM A F Ax F AyF Bx F By解:先将分布力用合力来代替。
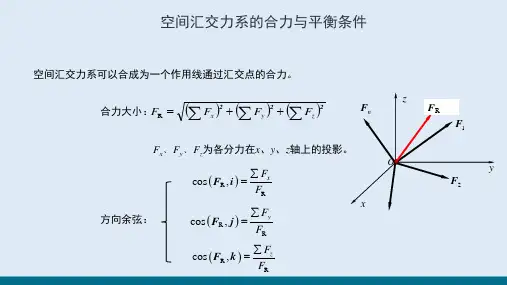
2、空间任意力系的平衡方程及常见的空间约束空间任意力系平衡的充要条件:空间任意力系的平衡方程:00xy z F FF ===ååå00xyzMMM===ååå空间任意力系平衡的充要条件:力系中各力在任一坐标轴上的投影的代数和等于零,以及各力对每一个坐标轴的力矩的代数和也等于零.该力系的主矢、主矩分别为零.(1) 空间任意力系的平衡方程(基本式)常见的空间约束00xy z F FF===ååå00xyzM M M ===ååå空间任意力系的平衡方程(基本式)平衡方程除了基本式之外,还有四矩式、五矩式、六矩式。
有几个力矩平衡方程,称之为几矩式。
各种形式应该根据实际情况灵活运用。
基本式以外的方程形式,通常不再给限定条件,一般的情况下只要列出的方程能求解出未知量即是未违反限制条件。
常见的空间约束00zxyF MM===ååå空间平行力系的平衡方程各种力系的独立平衡方程个数空间任意力系6个空间汇交力系3个空间平行力系3个空间力偶系3个平面任意力系3个平面汇交力系2个平面平行力系2个平面力偶系2(1)个最一般情形:空间、任意一级特殊情形(包含一种特殊情况):空间问题+特殊力系,或者任意力系+平面情形二级特殊情形(包含两种特殊情况):平面问题+特殊力系。
2、空间任意力系的平衡方程及常见的空间约束(2) 空间常见约束类型柔索二力杆2、空间任意力系的平衡方程及常见的空间约束2、空间任意力系的平衡方程及常见的空间约束径向轴承圆柱铰链铁轨蝶铰链球铰链导向轴承带有销子的夹板导轨空间任意力系及重心的计算f. 6个未知约束量空间固定端约束分析实际的约束时,需要忽略一些次要因素,抓住主要因素,做一些合理的简化。
比如导向轴承和径向轴承之间的区别;蝶铰链和止推轴承之间的区别。
如果刚体只受平面力系的作用,则垂直于该平面的约束力和绕平面内两轴转动的约束力偶都应该为零,相应减少了约束量的数目。
1第3章 力系的平衡 3.1 主要内容空间任意力系平衡的必要和充分条件是:力系的主矢和对任一点的主矩等于零,即 0=R F 0=O M 空间力系平衡方程的基本形式 0,0,0=∑=∑=∑z y x F F F 0)(,0)(,0)(=∑=∑=∑F F F z y x M M M空间汇交力系平衡的必要和充分条件是:力系的合力 0=R F空间汇交力系平衡方程的基本形式0,0,0=∑=∑=∑z y x F F F空间力偶系平衡的必要和充分条件是:各分力偶矩矢的矢量和 0=∑i M空间力偶系平衡方程的基本形式 0)(,0)(,0)(=∑=∑=∑F F F z y x M M M平面力系平衡的必要和充分条件:力系的主矢和对于任一点的主矩都等于零,即:0=∑='F F R;0)(=∑=F O O M M 平面力系的平衡方程有三种形式:基本形式: 0)(,0,0=∑=∑=∑F M F F O y x二矩式: 0)(,0)(,0=∑=∑=∑F M F M F B A x (A 、B 连线不能与x 轴垂直)三矩式: 0)(,0)(,0=∑=∑=∑F M F M M C B A (A 、B 、C 三点不共线)平面力系有三个独立的平衡方程,可解三个未知量。
平面汇交力系平衡的必要和充分条件是合力为零,即0=∑=F F R 平衡的解析条件:各分力在两个坐标轴上投影的代数和分别等于零,即0,0=∑=∑y x F F两个独立的平衡方程,可解两个未知量。
平面力偶系平衡的必要和充分条件为:力偶系中各力偶矩的代数和等于零,即∑=0Mi一个独立的平衡方程,可解一个未知量。
3.2 基本要求1.熟练掌握力的投影,分布力系的简化、力对轴之矩等静力学基本运算。
2.能应用各种类型力系的平衡条件和平衡方程求解单个刚体和简单刚体系统的平衡问题。
对平面一般力系的平衡问题,能熟练地选取分离体和应用各种形式的平衡方程求解。
3.正确理解静定和超静定的概念,并会判断具体问题的静定性。
14秋学期《理论力学》在线作业3
一,单选题
1. 4.2 空间平行力系的平衡方程为三个:。
()
A. 对
B. 错
?
正确答案:A
2. 6.2 点作匀速运动,则点的加速度等于零。
()
A. 对
B. 错
?
正确答案:B
3. 8.1 动点的牵连速度是指该瞬时牵连点的速度,它所相对的坐标系是()
A. 动坐标系
B. 定坐标系
C. 不必确定的
D. 定或动坐标系都可以
?
正确答案:B
4. 6.3 点作直线运动,运动方程为x=27t-t3,x的单位为m,t的单位为s。
则点在t=0到t=7s的时间间隔内走过的路程为()
A.
154m
B. 262m
C. 54m
D.
208m
?
正确答案:B
5. 5.2 关于摩擦力,下列哪些说法是正确的()
A. 相互压紧的粗糙物体之间总是有摩擦力的。
B. 一个物体只有在另一个物体表面运动或有相对运动趋势时,才有可能受到摩擦力。
C. 静止的物体一定受到静摩擦力的。
D.
具有相对运动的两个物体,一定存在摩擦力。
?。