康耐视读码器设置手册
- 格式:ppt
- 大小:944.00 KB
- 文档页数:12

COGNEX®DataMan® 100快速参考指南DataMan 100COGNEX产品概览3719.55522.122.743.54222.122.742M3 x 515°1233456DataMan 可以在三种距离范围内操作。
设置焦距:取下螺丝和镜头盖。
设置焦距。
装回镜头盖和螺丝。
设置焦距COGNEX123USB通过会显示为USB 串行注:此连接类型必须安装DataMan PC 软件!USB 键盘注:采用这种连接类型,无法使用RS-232通过标准的 DataMan 100DM100-PATCH-000RS-232 串行有关设置波特率和其他参数的代码,参见第 27 IOIOIO输入接线实例多端口连接使用多端口连接将多个设备)。
由于配置有很多可能性,因此相反,您还必须自己制作符合系统配置要求的电缆。
8-1-偶校验8-1-无115,200波特率9600 波特率COG NEXCOG NEXCOG NEXSensorView 示教盒用户指南介绍了如何将 SensorView 示教盒连至 DataMan 100。
i读码器控制代码将读码器重置为出厂默认值重新启动读码器版权 © 2011 Cognex Corporation 保留所有权利。
未得到 Cognex Corporation 书面许可,任何人不能复制本文档,也不得将其转让给任何其他媒体或翻译为其他语言。
硬件和本文档中描述的部分软件可能受一个或多个美国专利保护,具体内容参与Cognex 网站 /patents.asp。
其他美国和国外专利尚在申请中。
Cognex、Cognex 徽标和 DataMan 是 Cognex Corporation 的商标或注册商标。
康耐视相机操作使用说明书目录_、康耐视相机具体设置1.1软件安装双击康耐视相机软件,按照步骤一步步安装即可。
1.2流程编辑1•设置电脑本地连接IPV4地址为(设置为39段即可)。
2.双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图所示。
◎ In-Sight 浏览器・admin文件担)编辑d)查看辺亲统①)窗口⑪帮助⑩,73.双击图4.在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;> 开始单击“开始”中“已连接”,如下图所示,可以进行连接设备、断开设备、刷新、添加等操作。
图单击“开始”中的“设置图像”,如下图所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节> 设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,如卞图所示,合格阀值:每次拍照之后的得分如果人于阀值,则拍照成功,否则失败;旋转公差:检测部件能够旋转的角度范I韦I,如呆在范围之类则会拍照成功,否则会失败> 配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作,如下图所示。
新时达机器人视觉通信采用的TCP/IP通讯方式,单击“TCP/IP”,如下图所示,在“TCP/IP 设置”对话框中,“服务器主机名”设为(机器人控制器IP地址),“端I I”设置与CodeSys 中相同,本例中设为9876, “超时时间”设为15000, “结束符”设为字符串(CR13)。
单击''格式化输出字符串”,进行输出操作,如下图所示。
勾选“使用分隔符”,表示在输出之间用逗号分隔符进行隔开,方便进行数据处理操作;单击“添加”按钮,可以输出很多数据,这里只需要输出4个数据,“失败”、“定位器.X”、“定位器.Y”、“定位器. 角度”;输出数据说明:均为7个字节宽度,除图案•失败是整形外,其它数据均为浮点型,小数点位数为2位。
康耐视dm260说明书
DataMan150/260系列功能
对于1D线性条形码、高密度2D矩阵代码或直接部分标记(DPM)代码,DataMan150/260系列固定安装基于图像的条形码读卡器提供前所未有的性能、灵活性和易用性。
实现高读取率
DataMan150/260系列固定安装条形码读卡器凭借运行最新Cognex算法的高速双核处理引擎实现了尽可能高的读取速率。
1DMax带有Hotbars和2DMax,带有PowerGrid技术解码损坏或打印不良的1D和2D代码,尽管代码质量、打印方法或表面都标有代码,甚至可以读取没有可见周长或安静区域的2D代码。
简化在狭小空间中的安装
DataMan150/260系列车型提供直角或右角配置,以适应最紧的空间。
内联和九十度配置无需重新设计设备,以及带后视镜的复杂布线或光学路径。
减少安装时间和所有权成本
模块化照明和光学设备可轻松更改DataMan150和260系列阅读器镜头和现场照明。
这不仅减少了安装时间和资源,而且通过简化每个应用程序的性能并适应未来的流程变化,从而保护条形码读卡器的投资。

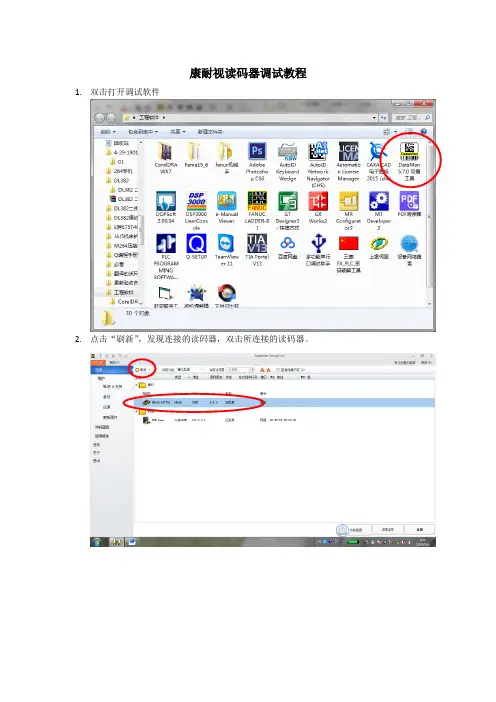
康耐视读码器调试教程1.双击打开调试软件
2.点击“刷新”,发现连接的读码器,双击所连接的读码器。
3.等待连接完成
4.进入调试画面。
5.进入设置---快速设置---实时,出现读码头视野画面,观察读码头的视野,进行调整位置,使二维码尽量在视野正中心。
如果读码效果不好,单击协调,读码器自动调整。
6. 等待自动协调完成。
7.点击测试,查看读取率,在70%以上效果比较理想,否则重复上步骤重新协调。
8.最后点击系统---保存设置到读码器。
注:
读码器的读取效果与二维码的质量、光照强度、视觉范围、视觉角度、焦距、协调参数等有关。
读码器在协调过程和参数写入过程中请不要断开连接和断电,否则会导致读码器损坏!。
康耐视dm8050E说明书一、安装InsightExplorer450复制光盘的软件至PC硬盘,根据安装向导完成安装软件,安装成功,桌面出现Explorer450图标。
二、设置相机和PC在同一网段1、双击软件,在菜单栏选择“系统”--“将传感器、设备添加至网络”。
2、双击相机设备(红色椭圆内设备图标),进入相机编辑界面。
3、在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程。
(1)开始单击“开始”中“已连接”,可以进行连接设备、断开设备、刷新、添加等操作。
(2)单击“开始”中的“设置图像”。
(3)在“采集、加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
(4)在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节。
(5)设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比:单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
(6)在“定位部件”的设置对话框中:合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败。
旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败。
4、配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作。
新时达机器人视觉通信采用的TCPAP通讯方式,单击“TCPIP”,在“TCPAP设置”对话框中,“服务器主机名”设为(机器人控制器IP地址),“端口”设置与Codes vs中相同,本例中设为9876,“超时时间”设为15000,“结束符”设为字符串(CR13)。
5、单击“格式化输出字符串”,进行输出操作,勾选“使用分隔符”,表示在输出之间用逗号分隔符进行隔开,方便进行数据处理操作。
单击“添加”按钮,可以输出很多数据,这里只需要输出4个数据,“失败”“定位器X”“定位器Y”“定位器角度”。
康耐视相机操作使用说明书目录一、康耐视相机具体设置31.1软件安装错误!未定义书签。
1.2流程编辑31.3C ODESYS通信注意事项6二、相机标定72.1相机校准72.2绝对坐标实现92.3相对坐标实现10三、示教器示例程序113.1绝对坐标实现范例113.2相对坐标实现范例11四、CODESYS逻辑开发134.1S OCKET通信开发134.2外部点数据处理14五、细节说明17一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;➢开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节➢设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
在“定位部件”的设置对话框中,如下图1.5所示,合格阀值:每次拍照之后的得分如果大于阀值,则拍照成功,否则失败;旋转公差:检测部件能够旋转的角度范围,如果在范围之类则会拍照成功,否则会失败图1.5➢配置结果单击“配置结果”中“通信”按钮,进行通讯设置操作,如下图1.6所示。
COGNEX®DataMan®8000 系列快速参考指南使用入门关于 DataMan 8000 • DataMan 8000 配件•读码器和基站的物理布局第 4 页1DataMan 8000 软件设置读码器概述•安装 DataMan 8000 软件•启动设置工具•使用设置工具菜单栏第 10 页2连接选项通过以太网连接•排除以太网连接故障•通过 RS-232 连接•键盘仿真•通过 USB 连接3使用 DataMan 8000 系列无线读码器连接至无线 DataMan 8000 •基站路由功能•缓冲数据•充电•更换电池4工业协议、符合性信息、警告和通告工业协议• DataMan 8000 读码器和基站规格•激光信息•机构符合性声明6使用 DataMan 8000 读取代码视野和读码距离•触发类型5第 16 页第 26 页第 41 页第 45 页以太网 RS-232 USBDataMan 8000 读码器使用无线通讯模块时,还提供智能基站。
基站扮演读码器与计算机或网络之间的路由器角色。
激光瞄准器UltraLight(仅限于DataMan 8500挂绳钩指示灯触发器(按住读码)••RS-232以太网(可选配3 级电源插头(最大 13W)备用电池充电器状态指示灯备用电池充电器通信模块插入点以太网 RS-232 USB连接相应的电缆线路。
接通设备的电源。
读码历史记录连接状态/信号强度电池电量指示灯两颗螺钉的位置启用 DHCP将读码器重置为出厂默认值两颗螺钉的位置21. 6VDC 电源 (DM100-PWR-000)毫米 x2.12. VCC = 2.5 米电缆 +6.0VVCC = 5 米电缆RS-232 电缆的供电由 D-SUB 的第使用。
键盘适配器连接至未接通电源PS/2 键盘适配器。
使用无线读码器,扫描基站 PS/2开始菜单找到读码器配置代码文档)。
也可以使用一对 RP 代码切换读码器和基站两者的 USB 模式(CDC 或 HID)。

扫描头设置方法Dataman setup tool软件连接扫描头方法Dataman调试软件通过以太网对扫描头进行参数设置,在对扫描头进行参数设置前必须将扫描头IP与所连接的计算机IP设置到一个网段中,如果不知道扫描头的IP,可以通过康耐视提供的cognex explorer软件直接进行读取,或者通过强制改变扫描头IP的方法给扫描头更改一个已知的IP。
Cognex explorer直接读取:点击可执行文件后可以直接显示目前网络中已经连接的扫描头IP地址,只需将计算机IP 更改为同扫描头一个网段即可通讯。
强制更改扫描头IP:进行此操作需要获取扫描头的MAC地址,MAC地址在扫描头背面的标签上有注明。
添入MAC 地址,设置将要更改的IP地址,子网掩码,点击ok按钮,扫描头自动重启后新的IP地址即生效。
将扫描头和计算机设置为一个网段,点击软件可执行文件setup tool弹出以下画面。
从画面中可以看出已经连接的扫描头已被识别,双击相应的扫描头图标即可进入设定画面。
注:如果dataman 软件没有连接到任何扫描头,是不能进入软件进行任何设置的。
连接扫描头后进入dataman的初始画面工作模式设置快速设置相关参数设定Exposure曝光参数:默认数值200Focus焦距设定:根据实际扫描效果由PLC进行设定Trigger settings触发模式:设定为congtinuous(external)外部触发连续方式。
光源模式可以通过点击扫描头光源图标所示的led灯进行灵活配置。
码制设置点击主菜单中symbology settings,弹出以上窗口,在这里主要进行读取码制的设定,可以进行多重组合,本扫描头可以进行一维码,二维码的读取,解码方式有两种ID MAX和ID QUICK。
ID MAX解码特点:解码能力强,解码过程相对耗时。
ID QUICK解码特点:解码速度快,解码能力稍弱。
通讯设置主页面communication settings选项中设置扫描头IP地址,例子中设置为192.168.1.8,子网掩码255.255.255.0,默认网关可不填communication settings->network setting选项中按照上图进行参数设置,host address中配置的是与之通讯的PLC 系统网络模块的IP地址(192.168.1.6)和端口号(2000),client port代理端口(2000),protocol必须设置为UDP 通讯方式。
扫描头设置方法Dataman setup tool软件连接扫描头方法Dataman调试软件通过以太网对扫描头进行参数设置,在对扫描头进行参数设置前必须将扫描头IP与所连接的计算机IP设置到一个网段中,如果不知道扫描头的IP,可以通过康耐视提供的cognex explorer软件直接进行读取,或者通过强制改变扫描头IP的方法给扫描头更改一个已知的IP。
Cognex explorer直接读取:点击可执行文件后可以直接显示目前网络中已经连接的扫描头IP地址,只需将计算机IP 更改为同扫描头一个网段即可通讯。
强制更改扫描头IP:进行此操作需要获取扫描头的MAC地址,MAC地址在扫描头背面的标签上有注明。
添入MAC 地址,设置将要更改的IP地址,子网掩码,点击ok按钮,扫描头自动重启后新的IP地址即生效。
将扫描头和计算机设置为一个网段,点击软件可执行文件setup tool弹出以下画面。
从画面中可以看出已经连接的扫描头已被识别,双击相应的扫描头图标即可进入设定画面。
注:如果dataman 软件没有连接到任何扫描头,是不能进入软件进行任何设置的。
连接扫描头后进入dataman的初始画面工作模式设置快速设置相关参数设定Exposure曝光参数:默认数值200Focus焦距设定:根据实际扫描效果由PLC进行设定Trigger settings触发模式:设定为congtinuous(external)外部触发连续方式。
光源模式可以通过点击扫描头光源图标所示的led灯进行灵活配置。
码制设置点击主菜单中symbology settings,弹出以上窗口,在这里主要进行读取码制的设定,可以进行多重组合,本扫描头可以进行一维码,二维码的读取,解码方式有两种ID MAX和ID QUICK。
ID MAX解码特点:解码能力强,解码过程相对耗时。
ID QUICK解码特点:解码速度快,解码能力稍弱。
通讯设置主页面communication settings选项中设置扫描头IP地址,例子中设置为192.168.1.8,子网掩码255.255.255.0,默认网关可不填communication settings->network setting选项中按照上图进行参数设置,host address中配置的是与之通讯的PLC 系统网络模块的IP地址(192.168.1.6)和端口号(2000),client port代理端口(2000),protocol必须设置为UDP 通讯方式。
软件环境Insight Firmware Version: 5.6.0(037)Insight Explorer Software Version: 5.6.0Mitsubishi PLC: Q06UDEHCPUGX Works Version: 2 Version 1.77F2.Insight SpreadSheet设置2.1设置相机IP地址,选择SLMP Scanner。
2.2打开设置,选择控制器类型,填写PLC IP地址和协议设置的端口号。
2.3设置寻址页填入需要的控制字/状态字/输入数据/输出数据2.4读取PLC发送的数据,FormatInputBuffer/ReadUserDataBuffer,注意事件和协议的选择。
2.5发送结果数据到PLC,FormatOutputBuffer/WriteResultsBuffer。
2.6 A0中相机触发器设置为工业以太网。
3.PLC设置3.1IP地址设置,通讯代码设置选择二进制,勾上允许Run中写入。
3.2选择协议和端口号,注意十进制和16进制,和Insight设置保持一致。
3.3保存,设备断电重新启动。
4.Insight读取PLC发送的数据在UserDataD102/D104中写入需要传输的数据,SetUserDataM116置On一次,然后OFF。
SoftEvent0M124置On一次,然后OFF,我们看到Insight的数据已经更新了。
5.Insight发送结果到PLCTriggerEnableM100置ON,TriggerM101置ON一次,Insight触发一次,同时数据结果显示在InspectionResultsD205之后的数据区中。
使用PLC梯形图读取数据时,注意时序逻辑。
6.Job切换SetOnlineM107置ON,Insight处于通讯联机状态,D100写入需要更改的JobID编号,ExecuteComand置ON,然后OFF,Job切换,M107置Off,Insight联机模式。
康耐视读码器电源线针角说明
读码器电源线是有针脚的。
虽然针脚弯曲或缺失很容易探测到,但是高度稍微不正确的针脚也会产生同样严重的影响。
短针脚会造成无连接,而高针脚会造成其他针脚无法连接。
轻微的高度差异会造成压降或间歇性的、难以跟踪的故障。
针脚插入并将组件组装到设备中后,故障的探测和诊断会更加困难。
你必须先确定你的接近开关是NPN常开型的,然后棕色线接计数器的4号脚,黑色线接计数器的3号脚,蓝色线接计数器的1号脚。
然后计数器电源接2和7号脚,剩下的5一6一8三个脚是触点。
加一个220V的HH51P或HH52P中间继电器,将近接开关、中间继电器的线圈与220V电源串联接好,将中间继电器的常开触点接入计数器的计数输入端即可。
两线制的近接开关不可以直接进入计数器,因为通电后近接开关有一个自身的220V工作电压会击穿计数器,中间继电器的常开触点两端分别连接到计数器的1、3脚即可。
如果不用中间继电器,但需改用10V~30V的NPN三线制的近接开关也可以,将三线制近接开关的黑色线和蓝色线接到计数器的1、
3脚,棕色线接10V~30V电源正极,蓝色线同时接10V~30V电源负极。