康耐视机器视觉演讲文稿
- 格式:pdf
- 大小:895.79 KB
- 文档页数:28

第五卷一.填空题(每空1分,共30分)1.机器视觉可以做、、、。
2.PATMAX训练模板特征中的黄线表示粗糙特征,绿线表示精细特征。
D即感光元器件是由一组矩阵式的元素组成,它的功能是将光信号转换成数字信号。
4.相机所能看到的最小特征即为一个像素。
5.名词解释FOV 相机所能看到的现实世界的物理尺寸。
曝光照相机底片或感光纸感光。
景深图像清晰时在对焦范围内前后的前后距离。
对比度图像中明暗区域最亮的白和最暗的黑之间不同亮度层级测量。
6.标定结果中RMS的定义是有效值 .7.8704E卡采用4-Pin电源连接器连接12V电源。
8.物距(WD)的定义是指物体到透镜光心的距离或被测物到相机镜头的距离。
9.CogPMAlignTool是基于的模板而不是基于像素灰度值的模板匹配工具,支持图像的与自由度。
10.CogCaliperTool的边缘模式有和。
11.黑白相机成像原理为有光线进入相机区域表现为__________色,无光线进入相机的区域表现为_________色。
12.远心镜头可以消除透视畸变。
13.机器视觉由哪些部分组成通信、图像采集卡、照明、视觉工具、视野。
14.镜头的畸变分为径向畸变,切向畸变两类。
二.不定项选择题(每空2分,共10分)1. 在进行视觉对位引导项目中,需建立视觉坐标系与机械手坐标系之间的对应关系,而( C )就是来完成该作用。
A 检测B 标定C 定位D 曝光2. 焦距不变的情况下影响视野的因素有( AB )A. 物距 B.像距 C. 成像面大小 D.被拍物体大小3. 以下哪些行为是严令禁止的( ABC )A. 调试或触动与康耐视无关的设备或治具B.携带U盘进入生产车间C. 私自修改程序、数据帮助通过机器测试、验证D.受到他人辱骂、殴打保持克制,离开事发地点4. 白色的塑料药瓶中有红蓝两种颜色字体,现在仅需检测蓝色字符,请问使用什么光源?( A )A.红光B.绿光C.蓝光D.红外光5.什么样的光源带有漫射和均匀光线,是弧面、反光和不平整表面的最佳选择( A )A.CDI/DomeB.亮场C.暗场D.背景光三.问答题(30分)1.请根据题目所提供的信息,写一封培训邮件。



C h i n as t o r a g e&t r a n s p o r t m a g a z i n e 2020.0278今天,机器视觉设备已经成为了物流分拣系统和工业制造系统的“眼睛”,为整个仓库提升运作效率,降低运营成本提供重要保障。
有人说在不久的将来,机器视觉设备将迎来爆炸式的发展。
让我们来听一听康耐视中国大中华物流行业集成商销售总监梁荣对此有何高见。
机器视觉,潜力巨大梁总介绍,随着中国市场对于机器视觉技术的需求不断增加,康耐视也在中国市场推出了越来越多不同种类的设备,可以应用于多种工况。
“高速分拣机中使用的D a t a Ma n 470系列图像式扫码器,中低速解决方案中使用的D a t a -Ma n 374系列,用于体积测量的3D -A 1000智能相机,以及火炬光源、液态镜头等新产品、新技术,都是康耐视在中国市场备受欢迎的产品解决方案。
”梁总表示,中国物流设备市场正在经历着一场由自动化向智能化过渡的革命。
在这一发展变化时期,客户对于机器视觉技术也正在经历着由不了解到了解,由未采用到采用的转变过程。
“可以说,康耐视优秀的产品解决方案,为中国客户提供了更多选择。
当客户了解到我们的产品可以帮助他们实现更大价值后,我们也加快了研发脚步,试图为中国市场带来更加贴合客户使用需求的产品。
这些新产品的推出,大大提升了运行效率,不管是准确度还是速康耐视:机器视觉技术为物流仓储保驾护航度,都能够更上一层楼,这也为我们在中国市场的继续发展铺平了道路,也为机器视觉技术在中国的进一步推广打造了良好的环境。
”对于物流行业的迅猛发展,梁总表示,物流行业正在成为中国最具发展潜力的行业之一。
“我们能看到,物流吞吐量正在以极快的速度增长,特别是随着中国移动互联技术的高速发展,电商、快递开始成为人们生活中不可或缺的部分。
极大的物流压力倒逼设备商不断提升自己的产品效率和柔性,在这一过程中,机器视觉无疑是新技术的代表。

康耐视工业机器视觉基础及应用模块五电子表格基础编程任务一电子表格简介【学习目标】1.了解电子表格的简介与功能。
2.创建一个电子表格作业。
【相关知识】除了Easy Builder,In-Sight Explorer还提供了一个更强大的类似于Microsoft Excel 的环境,以便配置更多高级应用。
In-Sight Explorer电子表格视图是配置视觉工具和处理视觉应用数据的强大、灵活而高效的工具。
In-Sight 电子表格包含专用功能、选项和操作,用户不需编写任何代码即可解决复杂的应用问题。
In-Sight Explorer软件界面的电子表格视图能让用户拥有满意的体验。
拖放式视觉工具和图形调色板加上基于菜单的工具属性表格使任务配置更加简单。
打开In-Sight Explorer软件,默认打开的是Easy Builder编程环境。
可以打开菜单栏的“查看”,点击“电子表格”,切换至“电子表格”编程环境。
电子表格编程环境总览图创建、打开、保存作业“电子表格”下的作业创建、打开与保持与“Easy Builder”基本一致,可以通过“菜单栏”上的“文件”实现,或者通过“工具栏”的新建作业、打开作业、保存作业。
实训清除所有EasyBuilder作业,创建一个新的电子表格作业,保存命名为“test_1”。
任务二电子表格编程基础【学习目标】1.熟练掌握电子表格基本函数的功能、功能与操作步骤。
2.独立完成相关操作任务与实训。
【相关知识】一、AcquireImage函数AcquireImage函数指定了捕获数字图像并将其传输到In-Sigh视觉系统处理内存中。
In-Sight视觉系统捕获所有图像使用异步复位和渐进扫描。
灰度视觉系统产生8位图像,而彩色视觉系统产生24位图像。
在图像采集过程开始在大约250µs视觉系统,其步骤如下: •图像传感器在曝光参数指定的时间内集成光线。
•图像传感器中积累的图像逐行传输到串行移位寄存器。
第四卷一、填空题。
(1’X16=16)1、使用Gige Cogfiguration Tool工具对连接相机的每个网卡进行防火墙、巨型帧、 ebus 等参数进行配置;2、CogPMAlign图像训练正确顺序为获取训练图像、设置训练区域和原点、设置训练参数、训练图案、查看结果。
3、Caliper 编辑控件有两种模式,分别为____边缘模式_____,_______________________.4、PatMax的精度可以达到 1 像素。
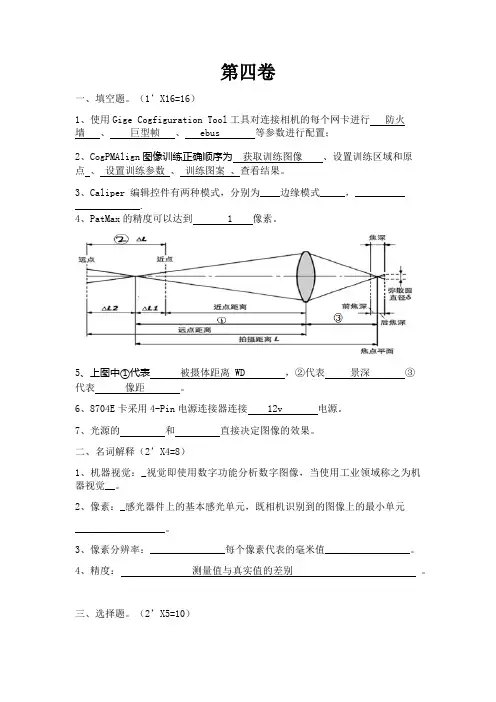
5、上图中①代表被摄体距离 WD ,②代表景深③代表像距。
6、8704E卡采用4-Pin电源连接器连接 12v 电源。
7、光源的和直接决定图像的效果。
二、名词解释(2’X4=8)1、机器视觉:_视觉即使用数字功能分析数字图像,当使用工业领域称之为机器视觉__。
2、像素:_感光器件上的基本感光单元,既相机识别到的图像上的最小单元__________________。
3、像素分辨率:_______________每个像素代表的毫米值_________________。
4、精度:测量值与真实值的差别。
三、选择题。
(2’X5=10)1、按照明方式分类,常见的光源类型有哪些?( ABCEF )A.背景光、B.线形光、C.环形光、D.低角度光、E.同轴光、F.Dome光2、下图, 白色表示光圈大小,请问哪个能得到最大的景深( F )A B C D E F3、下列哪些方法可以减少PMAlign工具运行时间( A )A. 增大接受阀值B. 减小粗糙粒度数值C.降低对比度阈值D.增加缩放比例4、可以读取ID代码的产品有:( C )A、CheckerB、In-SightC、DataManD、Vision Pro5、PMAlign工具输出结果数据(X,Y,Angle等)是在哪个空间下(C )A.像素空间B.输入图像空间C.训练区域选取空间D.搜索区域选取空间四、简答题。
(36分)1、机器视觉有那四个方面的作用,英文是什么?(8分)引导Guide检验Inspect测量Gauge识别Identify2、已知ProjectionValues为{10,9,9,8,7,9,11,15,12,10},FilterHalfSizeInPixels=2,求FilterValues。
机器视觉(1)——从业人员细分摘自中国机器视觉网论坛到底如何学习机器视觉?为了说明这个问题,我觉得应该先要简单地说明另一个问题:国内外机器视觉发展的不同。
我本人认为,只有先搞清了两边的不一样,才便于说清如何下手学习。
国外机器视觉发展到今天,已经从“一包到底”式的工作程序,发展到了细致分工的阶段了。
由于篇幅问题。
就不细讲这一行当如何从“一包到底”发展到细致分工过程。
一句话,国外机器视觉发展到今天,已经可以清清楚楚分为三个部分:1,底层开发部分。
2,二次开发部分。
3,最终使用部分。
于是在国外,从事这一行业的人现在也就可以简单而清楚地分成三种人:1,底层开发的人(从事底层开发工作的人)。
2,二次开发的人(从事二次开工作的人)。
3,使用及操作机器视觉系统的人(从事最终使用工作的人)。
第一类人。
就是我们常说的,开发通用视觉系统(如:DVT,西门子,欧姆龙,EVISION,COGNEX等等)的开发人员,也就是DVT,COGNEX这些公司开发部的技术职工。
第二类。
就是大家所说的OEM用户。
是专门用第一类人所开发出的系统,给第三类人搞二次开发,开发各种专为第三类人所用的系统。
第三类人,就是用户(enduser)。
这类人是真正将机器视觉系统应用到各个领域中的人,他们不仅在各自的行业中使用种种已经开发成型的机器视觉系统。
而且负责对各类系统进行测试及评估。
举个实际例子,这里有不少朋友问过这类问题:如何检测某一工件;检测光盘表面的系统该如何配置CCD相机、镜头及灯源等。
问这些问题的朋友应该算是第三类人。
他们公司要他们寻找一个系统可以用来检测本公司的产品。
但由于第一类人所开发的,只是通用的系统以及视觉系统开发工具的软件包。
并没有哪家公司专门开发一套系统来检测光盘或是某种特定的工件。
所以,这些朋友就应该来找我,因为我是第二类人。
我的工作就是,专门用DVT,EVISION,COGNEX等的视觉卡,以及视觉系统开发工具软件包为他们专门开发一套他们所需要的光盘检测系统或是工件检测系统。
第三卷一、填空题。
(1’X30=30)1、机器视觉是________________。
2、解释名词:Trigger:触发模式、 Live 实时显示、Exposure: 曝光方式、 Focus: 焦距。
3、基本码制包括一维线性条码、 DataMatrix、 QR-Code、 PDF417四种。
4、CCD即感光元器件是由一组矩阵式的__元素________组成,它的功能是将光信号转换成_________数字信号_______。
5、光源的视场分为____亮视物____________和______暗视物_______两种。
6、放大倍率主要是指__镜头将物体投射到胶片上的大小_与物体实际尺寸__之间的比值。
7、名词解释FOV_________相机所能看到的现实世界的物理尺寸_____________________________________________________。
WD_________镜头下地面到检测面的距离_______________________________________________________。
景深固定焦距,被检测物体清晰成像的最上面和最下面之间的距离。
8、训练图案特征中的黄线表示特征,绿线表示特征。
9、 Caliper工具中(实心箭头)代表卡尺的扫描方向(空心箭头)代表卡尺的投影方向,在抓边过程中,投影方向要与查找的边缘平行。
10、焦距是透镜中心到焦点的距离,焦距越小,景深大,光圈越大,景深小。
11、镜头的基本功能就是实现光束变换(调制)。
12、普通的定焦镜头有两个调节旋钮,作用分别是_____________________________和。
13、8位黑白相机的灰度等级为________________级。
二、不定项选择题。
(2X5=10)1、下面说法正确的是( A )A、同一物距、像距的情况下,CCD尺寸越大,FOV越大B、同一物距、像距的情况下,CCD尺寸越大,FOV越小C、同一物距、CCD尺寸不变的情况下,像距越大,FOV越大D、同一物距、CCD尺寸不变的情况下,像距越大,FOV越小2、机器视觉的四大功能中Guide(定位)功能能够提供给机械手哪些信息?( A )A、位置坐标B、长度C、解码信息D、有无信息3、什么样的光源带有漫射和均匀光线,是弧面、反光和不平整表面的最佳选择( A )A、Dome/CDIB、亮场C、暗场D、背景光4、下面哪些光源照射可以使胶水、墨水发出荧光( D )A、红光B、蓝光C、红外光D、紫外光5、下面哪些方法可以减少PMAlign工具的运行时间( A )A.增大接受阈值B.减小对比度阈值C.增大缩放范围D.减小搜索区域范围三、简答题。
Science and Technology &Innovation ┃科技与创新2023年第24期·29·文章编号:2095-6835(2023)24-0029-03基于机器视觉的工业机器人智能抓取系统设计杨再恩1,李文骥2(1.台州科技职业学院,浙江台州318020;2.台州市英创智能科技有限公司,浙江台州318010)摘要:随着智能制造的发展,工业机器人在现代生产中的应用越来越广泛,尤其在产线零件的抓取上极大地提高了自动化程度,但是传统工业机器人基于固定点示教的方式,无法实时精准抓取复杂形状的零件。
提出将机器视觉与工业机器人技术相结合,基于康耐视智能视觉相机,赋能工业机器人,提高产线零件的抓取精度,提升工业生产效率。
结果表明,该系统具有良好的抓取稳定性,可以实现对零件颜色、形状、位置的精准识别与抓取,在工业生产中具有广阔的应用前景。
关键词:机器视觉;工业机器人;PLC ;智能抓取中图分类号:TP242.2文献标志码:ADOI :10.15913/ki.kjycx.2023.24.008在工业4.0与中国制造2025的双重时代背景下,工业机器人作为一种工业自动化设备,已被广泛应用于工业生产中,尤其在产线零件的抓取上发挥着越来越重要的作用。
传统的工业机器人抓取系统都是针对已知零件固定点位的示教方式,然而实际生产中的零件经常存在不同类型、颜色、形状等情况,导致难以实现对复杂形状物体的智能抓取[1]。
因此,如何实现工业机器人的智能抓取,成为了目前研究的一个重要方向。
当前机器视觉作为一种高级的检测技术,即机器代替人眼的感知能力,甚至超越人眼[2],可实现对物体的识别、检测、跟踪等操作,在智能制造中的作用越来越突出。
本文基于机器视觉与工业机器人技术,设计一种智能抓取系统,能够自动完成对多种形状和大小零件的识别,引导控制机械臂的运动,实现对零件的精准抓取与放置,具有一定的应用前景和研究意义。
康耐视工业机器视觉基础及应用模块六视觉引导机器人操作与应用任务一视觉引导机器人简介【学习目标】1.了解视觉引导机器人的作业、功能与优势。
2.了解视觉引导机器人的调试步骤。
【相关知识】视觉引导与定位是工业机器人应用领域中广泛存在的问题。
对于工作在自动化生产线上的工业机器人来说,其完成最多的一类操作是“抓取-放置”动作。
为了完成这类操作,对被操作物体定位信息的获取是必要的,首先机器人必须知道物体被操作前的位姿,以保证机器人准确地抓取;其次是必须知道物体被操作后的目标位姿,以保证机器人准确地完成任务。
在大部分的工业机器人应用场合,机器人只是按照固定的程序进行操作,物体的初始位姿和终止位姿是事先规定的,作业任务完成的质量由生产线的定位精度来保证。
为了高质量作业,就要求生产线相对固定,定位精度高,这样的结果是生产柔性下降,成本却大大增加,此时生产线的柔性和产品质量是矛盾的。
视觉引导与定位是解决上述矛盾的理想工具。
工业机器人可以通过视觉系统实时地了解工作环境的变化,相应调整动作,保证任务的正确完成。
这种情况下,即使生产线的调整或定位有较大的误差也不会对机器人准确作业造成多大影响,视觉系统实际上提供了外部闭环控制机制,保证机器人自动补偿由于环境变化而产生的误差。
理想的视觉引导与定位应当是基于视觉伺服的。
首先观察物体的大致方位,然后机械手一边运动一边观察机械手和物体之间的偏差,根据这个偏差调整机械手的运动方向,直到机械手和物体准确接触为止。
但是这种定位方式在实现上存在诸多困难。
直接视觉引导与定位是一次性地对在机器人环境中物体的空间位姿进行详细描述,引导机器人直接地完成动作。
与基于视觉伺服的方法相比,直接视觉引导的运算量大大减少,为实际应用创造了条件,但这必须基于一个前提:视觉系统能够在机器人空间中(基坐标系中)精确测定物体的三维位姿信息。
视觉引导机器人(VGR) 优势:1、减少昂贵的高精度固定设备。
2、无需工具转换即能处理多种类型的工件。
一、连接相机1、根据康耐视接线说明书接好相机,通过网线连接上电脑。
在PC端打开in-sight浏览器。
2、打开“系统”菜单栏下的菜单项,或者右键点击In-Sight网络栏弹出“将网络、设备添加到网络”:查找出7402相机,如上图,其IP地址与PC不在同一个网段。
3、统一ip网段点击“复制PC网络设置”,输入125,点击“应用”,则把相机的ip地址设置为“192.168.0.125”,让相机、pc都处于192.168.0.xxx网段上。
4、打开相机双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载的作业(如pinwen.job)也打开。
“传感器”-》“启动”,设置相机上电后是否自动联机,设置自动加载的作业。
二、新建作业(电子表格下)1、转到电子表格视图2、“文件”-》“新作业”,或者点击左上角相应工具三、设置拍照参数双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为“手动”触发,即点击工具栏的触发图标或者按快捷键F5时,相机拍照。
四、校准1、calibrateGrid将坐标变换下的CalibrateGrid函数拖到一空白的电子表格B2:点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按enter键):点击“触发器”,则右上角现实找出的特征点数(276)。
点击下方“校准”按钮:点击“确定”按钮,则校准完成。
2、CalibrateImage经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射。
五、训练模版1、拿走标定板,把要查找的物品放到视野范围,按F5拍照2、函数栏里,“视觉工具”-》“图案匹配”-》TrainPatMaxPattern图像框选A0或B4,默认是A0。
3、双击“图案区域”栏:调整紫色区,双击鼠标(或者点击“确定”图标,或者按“enter”键)。
模版训练完成。
六、查找模版FindPatMaxPatterns,另外的FindPatterns类似。
机器视觉赢得竞争未来的钥匙精编W O R D版 IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】机器视觉:赢得竞争未来的钥匙2006中国国际机器视觉展览会暨中国国际机器视觉发展论坛招商函尊敬的先生/女士:您好!随着德国斯图加特机器视觉展览会vision 2006的胜利闭幕,世界机器视觉产业走过从20世纪80年代末期至今的艰苦历程,终于至臻完美,不但因作为各行业的重量保护神而受到尊重,而且更因成为企业竞争力的重要组成部分而引起广泛关注。
中国正在成为世界制造大国,制造水平已经接近世界发达国家水平,现代自动化技术及IT技术已经在制造生产线上得到广泛应用,中国制造对于制造效率及质量的要求也日益提高。
经过近十年的推广与发展,目前中国机器视觉市场已经走过寒冬,机器视觉技术越来越广为人们所认知,中国机器视觉产业将进入持续快速增长的阶段。
为了展示世界范围内机器视觉市场的发展概貌,同时也为世界机器视觉产业界与中国同行的交流平台,更为中国及亚洲地区广大机器视觉用户群体提供采购平台,由中国最大的工业学会即中国机械工程学会主办,由上海泰沣展览有限公司及中国视觉网共同承办的、以“机器视觉:赢得竞争未来的钥匙”为主题的中国国际机器视觉展览会暨中国国际机器视觉发展论坛将于2006年3月22-24日在上海展览中心隆重举行。
现针对本届论坛正式进行隆重招商。
一、会议内容1、中国国际机器视觉展览会暨中国国际机器视觉发展论坛开幕式拟邀请中国机械工程学会、中国机械工业联合会等有关领导出席开幕式,同时邀请中国视觉网等40多家媒体参与报道。
时间:2006年3月22日上午9:30地点:上海国际展览中心2、2006中国国际机器视觉发展论坛3、中国机器视觉俱乐部成立大会时间:2006年3月24日9:30-10:30地点:上海展览中心4、中国国际机器视觉展览会暨中国国际机器视觉发展论坛闭幕式及酒会时间:2006年3月23日17:30-22:00地点:上海香格里拉饭店二)主办、承办、支持单位主办单位:中国机械工程学会承办单位:中国机械工程学会上海办事处上海泰沣展览服务有限公司北京美视博文信息技术有限公司协办单位:中国机械工业联合会中国机械工程学会机械工业自动化分会中国机械工程学会无损检测分会中国机械工程学会中国机械工程学会中国机械工程学会中国机械工程学会流体传动与控制分会媒体支持:三、会议时间:2006年3月22日—24日四、会议地点:上海展览中心五、您选择本届论坛的理由:一)与会议经验丰富、专业听众资源丰富、了解机器视觉产业的专业的主办及承办单位合作;二)主办方将邀请近四十家大众及专业媒体前来报道,您的企业品牌与您的产品及技术优势,将跟随众多媒体进入各机器视觉应用的行业领域,享受效果最佳的品牌传播机会;三)主办方将通过学会及中国视觉网以及各合作伙伴媒体的优势资源,分三轮邀请展览会专业观众及论坛专业听众,他们无疑将是您的潜在客户群体;四)面对面直接与中国机器视觉用户直接交流与沟通,您不但可以直接拿到第一手市场信息,同时您更拥有获得商业机会的无限可能;五)结识更多业界同行,竖立贵单位在行业中的企业影响力;六)演讲时间长达50分钟,您完全有机会向台下潜在用户代表进行充分的表达;七)您拥有在本届展览会网站上主页广告的机会,广告时间为半年;八)所有本届论坛合作单位,均可获得参加本届展览会暨论坛闭幕酒宴入场券的机会;九)听众来自中国机器视觉全行业及中国半导体、电子制造、汽车制造、包装印刷、医药制造、塑料机械、食品饮料、烟草制造等机器视觉优质潜在客户群体的采购决策层与技术专业人士,预期听众超过200人次/场。