数控机床DDA数字积分法插补第一象限直线,逐点比较法插补二三象限顺圆弧
- 格式:doc
- 大小:664.14 KB
- 文档页数:13

数控技术课程设计说明书设计题目:数字积分法圆弧插补计软件设计指导老师:专业:机械设计制造及其自动化班级:机姓名:学号:目录一、课程设计题目 (1)二、课程设计的目的 (1)三、课程设计使用的主要仪器设备 (1)四、课程设计的任务题目描述和要求 (1)五、数字积分法插补原理 (2)5.1从几何角度来看积分运算 (2)5.2数字积分圆弧插补 (3)5.3数字积分法圆弧插补程序流程图 (5)5.4插补实例 (6)六、程序清单 (7)七、软件运行效果仿真 (18)八、课程小节 (21)九、参考文献 (22)一、课程设计题目数字积分法第一、二、三、四象限顺、逆圆插补计算二、课程设计的目的《数控原理与系统》是自动化(数控)专业的一门主要专业课程,安排课程设计的目的是通过课程设计方式使学生进一步掌握和消化数控原理基本内容,了解数控系统的组成,掌握系统控制原理和方法,通过设计与调试,掌握各种功能实的现方法,为今后从事数控领域的工作打下扎实的基础。
1)了解连续轨迹控制数控系统的组成原理。
2) 掌握数字积分法(DDA)插补的基本原理。
3)掌握数字积分法(DDA)插补的软件实现方法。
三、课程设计使用的主要仪器设备1、PC计算机一台2、数控机床实验装置一台3、支持软件若干(选用VB环境)四、课程设计的任务题目描述和要求数字积分法又称数字微分分析法DDA(Digital Differential Analyzer)。
数字积分法具有运算速度快、脉冲分配均匀、易于实现多坐标联动及描绘平面各种函数曲线的特点,应用比较广泛。
其缺点是速度调节不便,插补精度需要采取一定措施才能满足要求。
由于计算机有较强的计算功能和灵活性,采用软件插补时,上述缺点易于克服。
本次课程设计具体要求如下:(1)掌握数字积分插补法基本原理(2)设计出数字积分(DDA)插补法插补软件流程图(3)编写出算法程序清单算法描述(数字积分法算法在VB中的具体实现)(4)要求软件能够实现第一、二、三、四象限顺、逆圆插补计算(5)软件运行仿真效果插补结果要求能够以图形模式进行输出五、数字积分法插补原理数字积分法又称数字积分分析法DDA(Digital differential Analyzer),简称积分器,是在数字积分器的基础上建立起来的一种插补算法。


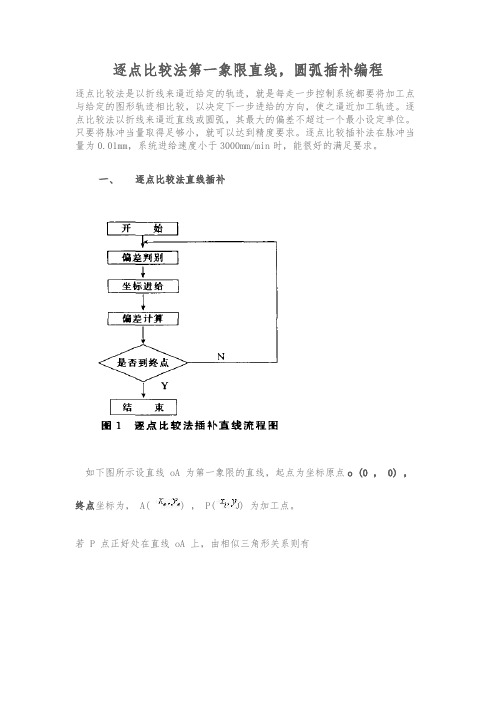
逐点比较法第一象限直线,圆弧插补编程逐点比较法是以折线来逼近给定的轨迹,就是每走一步控制系统都要将加工点与给定的图形轨迹相比较,以决定下一步进给的方向,使之逼近加工轨迹。
逐点比较法以折线来逼近直线或圆弧,其最大的偏差不超过一个最小设定单位。
只要将脉冲当量取得足够小,就可以达到精度要求。
逐点比较插补法在脉冲当量为0.01mm,系统进给速度小于3000mm/min时,能很好的满足要求。
一、逐点比较法直线插补如下图所示设直线 oA 为第一象限的直线,起点为坐标原点o (0 , 0) ,终点坐标为, A( ) , P() 为加工点。
若 P 点正好处在直线 oA 上,由相似三角形关系则有即点在直线 oA 上方 ( 严格为直线 oA 与 y 轴正向所包围的区域 ) ,则有即若 P 点在直线 oA 下方 ( 严格为直线 oA 与 x 轴正向所包围的区域 ) ,则有图 3 — 1 逐点比较法第一象限直线插补即令则有:①如,则点 P 在直线 oA 上,既可向 +x 方向进给一步,也可向 +y 方向进给一步;②如,则点 P 在直线 oA 上方,应向 +x 方向进给一步,以逼近oA 直线;③如,则点 P 在直线 oA 下方,应向 +y 方向进给一步,以逼近 oA 直线一般将及视为一类情况,即时,都向 +x 方向进给一步。
当两方向所走的步数与终点坐标相等时,停止插补。
这即逐点比较法直线插补的原理。
对第一象限直线 oA 从起点 ( 即坐标原点 ) 出发,当 F 时, +x 向走一步;当 F<0 时,y 向走一步。
特点:每一步都需计算偏差,这样的计算比较麻烦。
递推的方法计算偏差:每走一步后新的加工点的偏差用前一点的加工偏差递推出来。
采用递推方法,必须知道开始加工点的偏差,而开始加工点正是直线的起点,故。
下面推导其递推公式。
设在加工点 P( ) 处,,则应沿 +x 方向进给一步,此时新加工点的坐标值为新加工点的偏差为即若在加工点 P( ) 处,,则应沿 +y 方向进给一步,此时新加工点的坐标值为,新加工点的偏差为即综上所述,逐点比较法直线插补每走一步都要完成四个步骤 ( 节拍 ) ,即:(1) 位置判别根据偏差值大于零、等于零、小于零确定当前加工点的位置。
数控技术课程设计说明书设计题目:数字积分法圆弧插补计软件设计指导老师:专业:机械设计制造及其自动化班级:机姓名:学号:目录一、课程设计题目 (1)二、课程设计的目的 (1)三、课程设计使用的主要仪器设备 (1)四、课程设计的任务题目描述和要求 (1)五、数字积分法插补原理 (2)5.1从几何角度来看积分运算 (2)5.2数字积分圆弧插补 (3)5.3数字积分法圆弧插补程序流程图 (5)5.4插补实例 (6)六、程序清单 (7)七、软件运行效果仿真 (18)八、课程小节 (21)九、参考文献 (22)一、课程设计题目数字积分法第一、二、三、四象限顺、逆圆插补计算二、课程设计的目的《数控原理与系统》是自动化(数控)专业的一门主要专业课程,安排课程设计的目的是通过课程设计方式使学生进一步掌握和消化数控原理基本内容,了解数控系统的组成,掌握系统控制原理和方法,通过设计与调试,掌握各种功能实的现方法,为今后从事数控领域的工作打下扎实的基础。
1)了解连续轨迹控制数控系统的组成原理。
2) 掌握数字积分法(DDA)插补的基本原理。
3)掌握数字积分法(DDA)插补的软件实现方法。
三、课程设计使用的主要仪器设备1、PC计算机一台2、数控机床实验装置一台3、支持软件若干(选用VB环境)四、课程设计的任务题目描述和要求数字积分法又称数字微分分析法DDA(Digital Differential Analyzer)。
数字积分法具有运算速度快、脉冲分配均匀、易于实现多坐标联动及描绘平面各种函数曲线的特点,应用比较广泛。
其缺点是速度调节不便,插补精度需要采取一定措施才能满足要求。
由于计算机有较强的计算功能和灵活性,采用软件插补时,上述缺点易于克服。
本次课程设计具体要求如下:(1)掌握数字积分插补法基本原理(2)设计出数字积分(DDA)插补法插补软件流程图(3)编写出算法程序清单算法描述(数字积分法算法在VB中的具体实现)(4)要求软件能够实现第一、二、三、四象限顺、逆圆插补计算(5)软件运行仿真效果插补结果要求能够以图形模式进行输出五、数字积分法插补原理数字积分法又称数字积分分析法DDA(Digital differential Analyzer),简称积分器,是在数字积分器的基础上建立起来的一种插补算法。

3数控机床逐点比较法圆弧插补:与直线初步相似,圆弧插补加工是将加工点到圆心距离与被加工圆弧的名 义半径相比较,并根据偏差大小确定坐标进给方向,以 逼近被加工圆弧。
下面 以 第一象限逆圆弧为例,讨论圆弧的插补方法。
如图8-4所示,设要加工圆弧为第一象限逆圆弧 AB ,原点为圆心0,起点 y o ),终点为B (X e , y e )半径R ,瞬时加工点为P (X i ,y i ),点P 到圆<0 -<0‘—开始—若点P 正好在圆弧上,则有2 2 2 2X i +y j =R p =R即X i 2+y j 2-R 2=0若点P 在圆弧外则,则有2 2 2 2X i +y j =R p >R即X i 2+y j 2-R 2 > 0若点 P 在圆弧内则,则有2 2 2 2x i +y j =R p <R心距离为Rp------ X >0]+△*为 A (xo , <0* <7 F>0 ?*+X 走 一步 |] -y 走一y f1 FT -Ye ||FJF -Xe图8-2第一象限一象限直线插补轨迹图图8-3第一象限直线插补程序框图图初始化Xe , Ye ,JJ J J-1J =0 ?结束即x i2+y j2-R2 < 0显然,若令F i,j = x i2+y j2-R2( 8-4) 图8-4 逆圆弧插补则有:(1)F i,j= F i,j=0,则点P在圆弧上( 2 )F i,j >0 则点P 在圆弧外则( 3 )F i,j<0 则点P 在圆弧不则常将8-4称为圆弧插补偏差判别式。
当F i,j>时,为逼近圆弧,应向-x方向进给一步;当F i,j<0时,应向+y方向走一步。
这样就可以获得逼近圆弧的折线图。
与直线插补偏差计算相似,圆弧插补的偏差的计算也采用递推的方法以简化计算。
若加工点P (X i, y i)在圆弧外或者圆弧上,则有:F i,j=x i2+y j2-R2> 0为逼近该圆沿-X方向进给一步,移动到新加工点P( X i=1,y i),此时新加工点的坐标值为x i+1=x i-1 ,y i=y i新加工点的偏差为:F i+1,j= (x i-1) 2+y i2-R2=x i2-2x i+1+ y i2-R22 2 2= x i + y i -R +1F i+I,j= F i,j-2x i+1(8-5)若加工P (X i, y i)在圆弧内,则有F i,j=x i2+y j2-R2<0若逼近该圆需沿+y方向进给一步,移到新加工点P (X i, y i),此时新加工点的坐标值图8-5第一象限圆弧插补程序框图为新加工点的偏为:F i,j+i =X i2+(y i+1)2-R2=X i2+ y i2+1 -R22 2 2=X i + y i -R +1+2y iF i,j+i = F i,j -2y i+1 (8-6)从(8-5)和式(8-6)两式可知,递推偏差计算仅为加法(或者减法)运算,大大降低了计算的复杂程度。
菜鸟学四轴控制器之3:数字积分法DDA实现直线插补上⼀篇的逐点⽐较法显然是⽆法画⼀条有倾⾓的直线的。
因为X轴和Y轴永远都不同步,也就是像打台球⼀样,你打⼀个,我打⼀个,如果我进了球,我再接着打⼀个。
也就是说,如果直线为45度,也是没有办法画出来的,只能是锯齿形状。
如何实现X和Y同时动?也就是说,如果要画⼀条45度的线,X和Y同时动不就⾏了么?⽐如起点为0,0,终点为5,5,如果采⽤逐点⽐较法,则需要运动10次,如果两轴同时运动,则5步就可以实现了。
实现的途径如下:初始值为0,0,然后下⼀步,我们每个坐标增加5,则结果为5,5,这样会溢出,也就是说,溢出来出发运动⼀步。
溢出以后清零,下⼀步再加5,⼜溢出,继续同时运动⼀步。
⼀共5步就可以实现了。
等等,当然可以设置寄存器的溢出值为5,这样的寄存器使⽤3位就⾏了,但是如果要移动到(3,7)的坐标呢?显然,我们⽤的寄存器则可以选⽤溢出值为7.这样的话,我们要⽤的寄存器其实需要3个,⼀个是存(3,7)的初始值,⼀个存7这个阀值,⼀个则是累加器。
我们可以直接省掉⼀个阀值的寄存器。
也就是说,直接⽤3位的寄存器,阀值为8.步数X累加X余数X是否溢出Y累加Y余数Y是否溢出000000013007002600146139111351440012415700113161021102175009118801801也就是说,当X轴和Y轴同时溢出的时候,X和Y轴是在同步运动的。
问题来了,⽐如我们要运动从(0,0)运动到(2554,47)这个点,实际需要多少步?也就是说,只要能装的下2554这个的寄存器位数就可以了,也就是说,⽤4096来作为累加器。
移动的速度则是4096*脉冲当量的周期。
实际上,这个时间⽐2554+47慢了很多了。
但是这样做的好处显⽽易见,我们不是每⼀个图形,都是锯齿形了。
我们可以轻松的实现直接的实际⼑路如上⾯的图形从⽽实现了多座标联动,多坐标曲线插补,在轮廓控制⽅⾯得到了⼴泛的应⽤。