6 从传递函数求离散状态方程
- 格式:pdf
- 大小:22.70 KB
- 文档页数:2
第一章概论,讲述计算机控制系统的发展过程;计算机控制系统在日常生活和科学研究中的意义;计算机控制系统的组成及工作原理;计算机控制的特点、优点和问题;与模拟控制系统的不同之处;计算机控制系统的设计与实现问题以及计算机控制系统的性能指标。
1.计算机控制系统与连续模拟系统类似,主要的差别是用计算机系统取代了模拟控制器。
2.计算机系统主要包括:.A/D转换器,将连续模拟信号转换为断续的数字二进制信号,送入计算机;.D/A转换器,将计算机产生的数字指令信号转换为连续模拟信号(直流电压)并送给直流电机的放大部件;.数字计算机(包括硬件及相应软件),实现信号的转换处理以及工作状态的逻辑管理,按给定的算法程序产生相应的控制指令。
3.计算机控制系统的控制过程可以归结为:.实时数据采集,即A/D变换器对反馈信号及指令信号的瞬时值进行检测和输入;.实时决策,即计算机按给定算法,依采集的信息进行控制行为的决策,生成控制指令;.实时控制,即D/A变换器根据决策结果,适时地向被控对象输出控制信号。
4.计算机控制系统就是利用计算机来实现生产过程自动控制的系统。
5.自动控制,是在没有人直接参与的情况下,通过控制器使生产过程自动地按照预定的规律运行。
6.计算机控制系统的特性系统规模有大有小系统类型多种多样系统造价有高有低计算机控制系统不断推陈出新7.按功能分类1)数据处理系统2)直接数字控制(DDC)3)监督控制(SCC)4)分散型控制5)现场总线控制系统按控制规律分类1)程序和顺序控制2)比例积分微分控制(PID)3)有限拍控制4)复杂控制5)智能控制按控制方式分类1)开环控制2)闭环控制9.计算机控制系统的结构和组成控制算法软件网络硬件11.硬件平台运算处理与存储部分:CPU,存储器(RAM,ROM,EPROM,FLASH-ROM,EEPROM以及磁盘等),时钟,中断,译码,总线驱动等。
输入输出接口部分:各种信号(模拟量,开关量,脉冲量等)的锁存、转换、滤波,调理和接线,以及串行通讯等。
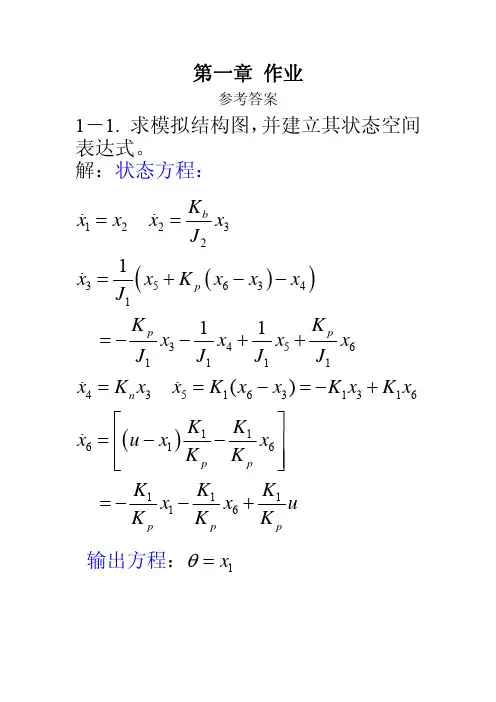
已知传递函数求状态空间表达式在控制系统理论中,常常需要将已知的传递函数转换为状态空间表达式。
这是因为状态空间形式更加直观,便于进行控制器设计和系统分析。
首先,我们需要将传递函数化简为标准形式:$$G(s) = frac{b_0 s^n + b_1 s^{n-1} + cdots + b_{n-1} s + b_n}{s^n + a_1 s^{n-1} + cdots + a_{n-1} s + a_n}$$其中 $n$ 为传递函数的阶数,$b_i$ 和 $a_i$ 是系数。
接下来,我们可以通过状态空间的基本方程来表示传递函数: $$begin{aligned}dot{x} &= Ax + Buy &= Cx + Duend{aligned}$$其中,$x$ 是 $n$ 维状态向量,$u$ 是 $m$ 维输入向量,$y$ 是$p$ 维输出向量。
$A$、$B$、$C$、$D$ 是系数矩阵,它们的维度分别为 $n times n$、$n times m$、$p times n$ 和 $p times m$。
我们可以通过下列步骤获得$A$、$B$、$C$ 和 $D$:1. 首先,将传递函数分解为零极点形式:$$G(s) =kfrac{(s-z_1)(s-z_2)cdots(s-z_n)}{(s-p_1)(s-p_2)cdots(s-p_n )}$$其中,$k$ 是比例系数,$z_i$ 和 $p_i$ 是零点和极点。
2. 利用零极点分解结果,构造传递函数的控制分式表达式:$$G(s) = kfrac{(s-z_1)}{(s-p_1)} cdot frac{(s-z_2)}{(s-p_2)} cdots frac{(s-z_n)}{(s-p_n)}$$3. 对每个控制分式,构造对应的状态空间模型:$$begin{aligned}dot{x_i} &= p_i x_i + uy_i &= z_i x_iend{aligned}$$其中,$i$ 取值为 $1$ 到 $n$。

python 将传递函数转换为离散状态方程如何将传递函数转换为离散状态方程引言:传递函数是描述连续系统的一种数学表示方法,它能够清晰地表示系统输入和输出之间的关系。
然而,在某些情况下,我们可能需要将传递函数转换为离散状态方程,以便对离散系统进行分析和控制。
在本文中,我们将介绍如何将传递函数转换为离散状态方程,并详细讨论每个步骤。
第一步:确定离散时间点在将传递函数转换为离散状态方程之前,我们需要确定离散时间点。
离散时间点是指我们对系统进行观测和采样的时间点。
通常情况下,我们选择等间隔的时间点进行采样,以简化计算和分析。
根据系统的动态响应速度和采样需求,我们可以选择适当的采样频率。
第二步:转换传递函数为差分方程传递函数将系统的输入和输出之间的关系表示为一个比例关系。
换句话说,传递函数描述了系统对输入信号的响应。
我们可以通过将传递函数转换为差分方程来描述系统的离散状态方程。
差分方程是离散系统中状态和输入与输出之间的关系的数学描述。
它类似于传递函数中的比例关系,但是使用差分方程我们可以更直接地描述系统在每个离散时间点的状态。
通过使用差分方程,我们可以更好地理解离散系统的动态行为。
为了将传递函数转换为差分方程,我们需要使用z变换的方法。
z变换是用于离散系统分析的一种数学工具,它可以将离散时间域的信号转换为z域的复数函数。
通过对传递函数进行z变换,我们可以得到离散系统的差分方程。
第三步:离散化传递函数的参数在使用z变换将传递函数转换为差分方程之后,我们需要离散化传递函数的参数。
传递函数中的参数通常是比例、积分和微分项,它们代表了系统对不同输入的响应。
为了在离散系统中使用这些参数,我们需要根据所选的采样频率对它们进行离散化。
离散化的方法有多种,常用的方法包括零阶保持、一阶保持和Tustin方法。
这些方法可以将传递函数的参数转换为离散系统中的等效参数,以便我们可以在离散系统中进行分析和控制。
第四步:确定差分方程的初始状态在离散系统中,初始状态非常重要,它决定了系统在初始时刻的行为。

MATLAB根据传递函数矩阵求状态空间方程在探讨MATLAB如何根据传递函数矩阵求状态空间方程之前,首先需要了解传递函数和状态空间方程的概念。
传递函数是描述线性时不变系统输入与输出之间关系的数学方法,通常用于描述信号处理、控制系统等领域中的系统行为。
而状态空间方程则是另一种描述系统动态行为的方法,它能够全面描述系统的状态随时间的变化。
在工程领域中,状态空间方程常常用于分析系统的稳定性、控制系统的设计等问题。
在MATLAB中,我们可以利用控制工具箱提供的函数来求解传递函数矩阵对应的状态空间方程。
我们需要用tf函数将传递函数表示为MATLAB中的传递函数对象,然后利用ss函数将传递函数对象转化为状态空间对象,从而得到对应的状态空间方程。
接下来,我们以一个具体的例子来演示MATLAB如何根据传递函数矩阵求状态空间方程。
假设有如下传递函数矩阵:\[ G(s) = \begin{bmatrix} \frac{2s+1}{s^2+3s+2} &\frac{3s+2}{s^2+s+1} \\ \frac{s+1}{s^2+2s+1} &\frac{4s+1}{s^2+4s+3} \end{bmatrix} \]我们希望利用MATLAB求解对应的状态空间方程。
我们可以利用tf函数将传递函数矩阵表示为MATLAB中的传递函数对象:```matlabnum = {[2 1; 3 2]; [1 1; 4 1]}; % 分子矩阵den = {[1 3 2; 1 1 1]; [1 2 1; 1 4 3]}; % 分母矩阵G = tf(num,den);```接下来,我们可以利用ss函数将传递函数对象转化为状态空间对象:```matlabsys = ss(G);```通过以上步骤,我们就可以得到对应的状态空间方程。
值得注意的是,状态空间方程通常表示为如下形式:\[ \dot{x} = Ax + Bu \]\[ y = Cx + Du \]其中,\[ A \]、\[ B \]、\[ C \]、\[ D \] 分别是状态方程的系数矩阵,\[ x \] 是系统的状态向量,\[ u \] 是系统的输入向量,\[ y \] 是系统的输出向量。

自动控制原理状态方程知识点总结自动控制原理中的状态方程是描述系统动态行为的一种数学模型。
通过分析系统的输入和输出,可以利用状态方程来预测系统的响应和稳定性。
本文将对状态方程的基本概念、求解方法以及应用进行总结。
一、状态方程的基本概念状态方程(State Equation)是指用代表系统参数和输入的变量来描述控制系统中元件状态随时间变化的关系表达式。
一般形式如下所示:dx(t)/dt = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)表示状态向量,代表系统的状态变量;u(t)为输入向量,指系统的输入信号;y(t)为输出向量,代表系统的输出信号;A、B、C、D为系统的参数矩阵。
二、状态方程的求解方法1. 直接求法:通过系统的关系方程,将所有元件的微分方程组合在一起,得到状态方程。
这种方法适用于简单且线性的系统。
2. 简化求法:对于线性定常系统,可以使用拉普拉斯变换将微分方程转换为代数方程,然后通过代数求解的方法得到状态方程。
3. 传递函数转换法:对于已知系统的传递函数,可以通过传递函数转换为状态方程的形式。
通过分子多项式的展开和分母多项式的因式分解,得到状态方程的形式。
三、状态方程的应用1. 系统分析:通过状态方程可以推导系统的稳定性、响应特性等。
可以通过分析系统的状态转移矩阵,判断系统的稳定性和控制性能。
2. 系统设计:利用状态方程可以进行系统的控制器设计。
可以通过选择适当的状态反馈增益矩阵,使系统满足不同的控制要求。
3. 系统仿真:借助计算机仿真工具,可以利用状态方程对系统进行仿真分析,模拟不同输入下系统的响应和稳定性,从而指导实际系统的控制设计。
总结:状态方程是自动控制原理中的重要概念,能够用数学模型描述系统的动态行为。
掌握状态方程的基本概念、求解方法和应用,对于理解和设计控制系统具有重要意义。
通过本文的介绍,相信读者已经对状态方程有了更深入的理解和认识。
让我们在自动控制原理的学习中更加游刃有余,应用自如。
机械设计制造及其自动化专业(本科)教学课程设置一、培养目标及规格本专业培养社会主义建设需要的,德、智、体全面发展的,具有从事机电一体化产品和系统的运行、维护、设计、制造及开发基本能力的高级应用型专门人才。
学生通过必须的理论课程及实践教学环节的学习,获得工程师的基本训练,毕业生达到本科基本要求.在政治思想道德方面:热爱祖国,拥护党的基本路线,具有全心全意为人民服务的精神。
遵纪守法,有良好的社会公德和职业道德.在业务知识和能力方面:1掌握机械设计制造的基本知识和基本技能;2掌握传感测试技术、执行与驱动技术,计算机控制技术等控制工程的基础理论、基本知识和基本技能;3初步具有机电一体化产品和系统的设计、制造、使用、维护和研究开发的综合能力;4具有机电产品制造工程的技术经济分析与生产组织管理的基本能力;5具有一定的外语水平,能够阅读本专业外文资料。
在身体素质方面:身体健康、能精力充沛地工作.二、专业方向专业方向:机电一体化系统机械制造过程自动化智能控制三、课程设置与教学管理1教学计划中设必修课、限选课、选修课和综合实践环节。
必修课由中央电大统一开设,执行统一教学大纲、统一教材、统一考试、统一评分标准。
2限选课由中央电大统一课程名称,执行统一的教学大纲(或教学要求),并推荐教材。
3为了保证培养目标的要求,建议本专业在本教学计划提供的选修课模块中按专业方向选择选修课,中央电大提供教学要求、教材等服务•地方电大亦可根据培养目标及当地的需要自开选修课,但实施性教学计划需报中央电大审批。
自开课程的教材、教学管理及考试由地方电大负责。
4有实验和作业的课程,办学单位必须按要求组织完成.凡未完成实验或实验不及格者,不能取得该门课程的学分•中央电大将对课程的实验(含大作业)及平时作业进行必要的抽查,以确保教学质量。
5综合实践环节由地方电大根据中央电大制定的教学大纲(要求)组织实施。
本专业学生必须参加毕业实习(2周),并完成附件二所规定的其他实践性教学环节的学分•中央电大将对实践性教学环节(包括实验、综合实践环节)进行必要的检查,以确保教学质量。
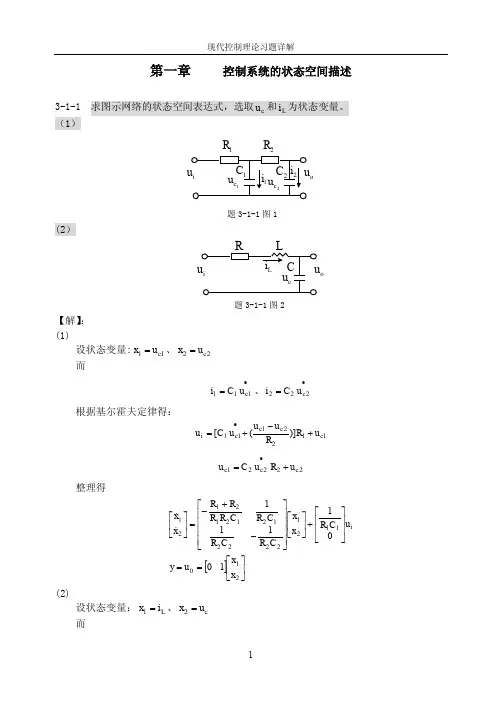
已知传递函数求状态空间表达式
在控制系统中,状态空间模型是一种常用的描述系统动态特性的方法。
然而,在实际应用中,有时候我们只能获取到系统的传递函数,而无法直接得到状态空间表达式。
那么,如何根据已知的传递函数求解状态空间表达式呢?
首先,我们需要将传递函数转换为特征方程的形式。
对于一个一阶系统,其传递函数可以表示为:
G(s) = K / (s + a)
其中,K和a是常数。
将其整理为特征方程的形式,可以得到: s + a = K / Y(s)
其中,Y(s)是系统的输出信号。
这个方程的左侧是状态空间模型中的状态方程,而右侧则是输出方程。
我们可以通过反演Laplace变换,将其转换为时域方程的形式,从而得到状态空间表达式。
对于高阶系统,我们需要将传递函数拆分为多个一阶系统的组合,然后重复上述步骤即可。
需要注意的是,在进行状态空间转换时,需要考虑到系统的初值条件和边界条件。
这些条件对于状态空间模型的建立非常重要,需要在转换过程中加以考虑。
总之,已知传递函数求解状态空间表达式的方法并不复杂,关键在于将传递函数转换为特征方程的形式,然后通过反演Laplace变换得到时域方程,最终得到状态空间表达式。
- 1 -。
python 将传递函数转换为离散状态方程摘要:1.引言2.离散状态方程的定义3.使用Python 将传递函数转换为离散状态方程4.总结正文:1.引言在控制理论和工程领域中,离散状态方程是描述系统动态特性的重要工具。
传递函数是连续系统的数学模型,然而在实际应用中,很多系统是离散的。
因此,将传递函数转换为离散状态方程对于分析和设计离散控制系统至关重要。
Python 作为一种流行的编程语言,可以方便地实现这一转换过程。
2.离散状态方程的定义离散状态方程描述了系统状态随时间变化的规律。
它通常包括一组状态变量和一组输入变量,以及状态转移方程和观测方程。
状态转移方程描述了系统状态如何随时间变化,观测方程描述了如何从系统输出中观测到状态信息。
离散状态方程可以表示为:x[k+1] = A * x[k] + B * u[k]y[k] = C * x[k] + D * u[k]其中x[k] 是状态向量,u[k] 是输入向量,y[k] 是输出向量,A、B、C、D 是系统矩阵。
3.使用Python 将传递函数转换为离散状态方程传递函数是连续系统的数学模型,通常表示为:G(s) = A / (s^n * (s^2 + 2 * s * z + z^2))其中s 是复变量,n 是系统的阶数,z 是系统的零点。
为了将传递函数转换为离散状态方程,我们需要计算系统的零点和极点。
Python 可以通过调用第三方库,如scipy.roots,来实现这一计算过程。
以下是一个Python 代码示例,演示如何将传递函数转换为离散状态方程:```pythonimport numpy as npfrom scipy.special import gammafrom scipy.roots import realdef convert_to_discrete_state_equation(G, dt):"""Convert a continuous-time transfer function G(s) to a discrete-time state equation.:param G: Transfer function:param dt: Time step:return: Discrete state equation"""# Calculate the poles and zeros of the transfer functionpoles, zeros = real(G)# Calculate the A, B, C, and D matricesn = len(poles)A = np.diag(poles)B = np.zeros((n, n))C = np.zeros((n, n))D = np.zeros((n, n))for i in range(n):B[i, i] = -poles[i]C[i, i] = 1D[i, i] = zeros[i]# Convert the state equation to a discrete form A_discrete = np.diag(np.exp(-poles * dt))B_discrete = np.zeros((n, n))C_discrete = np.zeros((n, n))D_discrete = np.zeros((n, n))for i in range(n):B_discrete[i, i] = -np.exp(-poles[i] * dt)C_discrete[i, i] = np.exp(-poles[i] * dt)D_discrete[i, i] = zeros[i]return A_discrete, B_discrete, C_discrete, D_discrete ```该函数接受传递函数G(s) 和时间步长dt 作为输入参数,并返回离散状态方程的系数矩阵。
python 将传递函数转换为离散状态方程【1】Python编程语言简介Python作为一种广泛应用于科学计算、数据分析和机器学习的编程语言,其简洁明了的语法和丰富的库使得开发者能够高效地完成各种任务。
在控制理论领域,Python也为传递函数和离散状态方程的转换提供了有力的支持。
【2】传递函数与离散状态方程概述传递函数是一种描述输入信号与输出信号之间关系的数学表达式。
在控制系统研究中,离散状态方程是描述系统动态特性的重要工具。
将传递函数转换为离散状态方程,有助于更好地分析和设计控制系统。
【3】将传递函数转换为离散状态方程的方法将传递函数转换为离散状态方程的主要方法是运用Z变换。
具体步骤如下:1.确定传递函数的类型(如线性、非线性等);2.对传递函数进行Z变换;3.根据Z变换的结果,构建离散状态方程。
【4】转换过程中的注意事项1.确保传递函数的稳定性,避免在离散状态方程中出现不稳定现象;2.注意离散状态方程的采样频率,以保证系统性能;3.在构建离散状态方程时,要合理选择状态变量和输入变量。
【5】示例代码与解析以下是一个简单的线性传递函数示例,并将其转换为离散状态方程:传递函数:G(s) = ω_n^2 / (s^2 + 2ζω_ns + ω_n^2)首先,对其进行Z变换:Z变换后的传递函数:G(z) = ω_n^2 * (1 / (1 + 2ζ * j * ω_n / π * z))然后,根据Z变换结果,构建离散状态方程:离散状态方程:x_dot = -2ζω_n * x + ω_n^2 * y通过这个例子,我们可以看到如何将传递函数转换为离散状态方程。
在实际应用中,根据具体问题选择合适的转换方法和参数,可以更好地分析和设计控制系统。
总结:本文介绍了Python中将传递函数转换为离散状态方程的方法和注意事项。
通过示例代码和解析,读者可以更好地理解这一过程,并应用于实际问题中。
python 将传递函数转换为离散状态方程
随着人工智能和机器学习领域的快速发展,深度学习模型在很多任务中取得了显著的成果。
在这些任务中,通常需要将连续状态空间的函数转换为离散状态方程以便进行计算。
Python作为一种广泛应用于科学计算和机器学习的编程语言,提供了丰富的库和工具来实现这一目标。
本文将介绍如何使用Python将传递函数转换为离散状态方程,并给出具体代码示例。
1.介绍Python将传递函数转换为离散状态方程的背景和意义
在许多实际应用中,如语音识别、自然语言处理等,我们需要对连续信号进行处理。
为了更好地对这些信号进行建模,我们可以将连续状态空间的函数转换为离散状态方程。
这样做的好处有以下几点:
- 降低计算复杂度:将连续状态空间的函数离散化后,可以减少计算量,使得模型更容易训练和优化。
- 便于建模:离散状态方程更容易进行数学建模,从而有利于分析问题和解决问题。
- 提高效率:通过离散化,我们可以利用计算机的优势对大量数据进行快速处理。
2.概述实现方法和相关库
在Python中,将传递函数转换为离散状态方程的方法主要包括使用信号处理库和深度学习框架。
以下是一些常用的库和工具:
- NumPy:一个用于数值计算的库,可以方便地处理大量数据。
- Scipy:一个包含信号处理、优化等功能的库。
- PyTorch或TensorFlow:深度学习框架,可以方便地搭建和训练深度神经网络。