《机械振动》课程期终考试卷-标准答案
- 格式:doc
- 大小:2.24 MB
- 文档页数:13

机械振动答案(1)选择题1解析:选D.如图所示,设质点在A 、B 之间振动,O 点是它的平衡位置,并设向右为正.在质点由O 向A 运动过程中其位移为负值;而质点向左运动,速度也为负值.质点在通过平衡位置时,位移为零,回复力为零,加速度为零,但速度最大.振子通过平衡位置时,速度方向可正可负,由F =-kx 知,x 相同时F 相同,再由F =ma 知,a 相同,但振子在该点的速度方向可能向左也可能向右.2.解析:选B.据简谐运动的特点可知,振动的物体在平衡位置时速度最大,振动物体的位移为零,此时对应题图中的t 2时刻,B 对.3.解析:选BD.质点做简谐运动时加速度方向与回复力方向相同,与位移方向相反,总是指向平衡位置;位移增加时速度与位移方向相同,位移减小时速度与位移方向相反.4解析:选C.因为弹簧振子固有周期和频率与振幅大小无关,只由系统本身决定,所以f 1∶f 2=1∶1,选C.5解析:选B.对于阻尼振动来说,机械能不断转化为内能,但总能量是守恒的.6.解析:选B.因质点通过A 、B 两点时速度相同,说明A 、B 两点关于平衡位置对称,由时间的对称性可知,质点由B 到最大位移,与由A 到最大位移时间相等;即t 1=0.5 s ,则T2=t AB +2t 1=2 s ,即T =4 s ,由过程的对称性可知:质点在这2 s 内通过的路程恰为2 A ,即2A =12 cm ,A =6 cm ,故B 正确.7.解析:选A.两球释放后到槽最低点前的运动为简谐运动且为单摆模型.其周期T =2πR g,两球周期相同,从释放到最低点O 的时间t =T4相同,所以相遇在O 点,选项A 正确.8.解析:选C.从t =0时经过t =3π2L g 时间,这段时间为34T ,经过34T 摆球具有最大速度,说明此时摆球在平衡位置,在给出的四个图象中,经过34T 具有负向最大速度的只有C 图,选项C 正确.9.解析:选CD.单摆做简谐运动的周期T =2πlg,与摆球的质量无关,因此两单摆周期相同.碰后经过12T 都将回到最低点再次发生碰撞,下一次碰撞一定发生在平衡位置,不可能在平衡位置左侧或右侧.故C 、D 正确.10.解析:选D.通过调整发生器发出的声波就能使酒杯碎掉,是利用共振的原理,因此操作人员一定是将声波发生器发出的声波频率调到500 Hz ,故D 选项正确. 二、填空题(本题共2小题,每小题8分,共16分.把答案填在题中横线上)11答案:(1)B (2)摆长的测量、漏斗重心的变化、液体痕迹偏粗、阻力变化……12答案:(1)ABC (2)①98.50 ②B ③4π2k计算题13.(10分)解析:由题意知弹簧振子的周期T =0.5 s ,振幅A =4×10-2m. (1)a max =kx max m =kA m=40 m/s 2. (2)3 s 为6个周期,所以总路程为s =6×4×4×10-2m =0.96 m.答案:(1)40 m/s 2(2)0.96 m14.(10分)解析:设单摆的摆长为L ,地球的质量为M ,则据万有引力定律可得地面的重力加速度和高山上的重力加速度分别为:g =G M R 2,g h =G M R +h2据单摆的周期公式可知T 0=2πLg ,T =2πL g h由以上各式可求得h =(T T 0-1)R . 答案:(T T 0-1)R15.(12分解析:球A 运动的周期T A =2πl g, 球B 运动的周期T B =2π l /4g =πl g. 则该振动系统的周期T =12T A +12T B =12(T A +T B )=3π2l g. 在每个周期T 内两球会发生两次碰撞,球A 从最大位移处由静止开始释放后,经6T =9πlg,发生12次碰 撞,且第12次碰撞后A 球又回到最大位置处所用时间为t ′=T A /4. 所以从释放A 到发生第12次碰撞所用时间为t =6T -t ′=9πl g -2T 2l g =17π2lg. 答案:17π2l g16.(12分解析:在力F 作用下,玻璃板向上加速,图示OC 间曲线所反映出的是振动的音叉振动位移随时间变化的规律,其中直线OC 代表音叉振动1.5个周期内玻璃板运动的位移,而OA 、AB 、BC 间对应的时间均为0.5个周期,即t =T 2=12f=0.1 s .故可利用匀加速直线运动的规律——连续相等时间内的位移差等于恒量来求加速度.设板竖直向上的加速度为a ,则有:s BA -s AO =aT 2①s CB -s BA =aT 2,其中T =152 s =0.1 s ②由牛顿第二定律得F -mg =ma ③ 解①②③可求得F =24 N. 答案:24 N机械振动(2)机械振动(3)1【解析】 如图所示,图线中a 、b 两处,物体处于同一位置,位移为负值,加速度一定相同,但速度方向分别为负、正,A 错误,C 正确.物体的位移增大时,动能减少,势能增加,D 错误.单摆摆球在最低点时,处于平衡位置,回复力为零,但合外力不为零,B 错误.【答案】 C2【解析】 质量是惯性大小的量度,脱水桶转动过程中质量近似不变,惯性不变,脱水桶的转动频率与转速成正比,随着转动变慢,脱水桶的转动频率减小,因此,t 时刻的转动频率不是最大的,在t 时刻脱水桶的转动频率与机身的固有频率相等发生共振,故C 项正确.【答案】 C3【解析】 摆球从A 运动到B 的过程中绳拉力不为零,时间也不为零,故冲量不为零,所以选项A 错;由动能定理知选项B 对;摆球运动到B 时重力的瞬时功率是mg v cos90°=0,所以选项C 错;摆球从A 运动到B 的过程中,用时T /4,所以重力的平均功率为P =m v 2/2T /4=2m v 2T ,所以选项D 错.【答案】 B4【解析】 由振动图象可看出,在(T 2-Δt )和(T2+Δt )两时刻,振子的速度相同,加速度大小相等方向相反,相对平衡位置的位移大小相等方向相反,振动的能量相同,正确选项是D.【答案】 D5【解析】 据受迫振动发生共振的条件可知甲的振幅较大,因为甲的固有频率接近驱动力的频率.做受迫振动物体的频率等于驱动力的频率,所以B 选项正确.【答案】 B6【解析】 由题意知,在细线未断之前两个弹簧所受到的弹力是相等的,所以当细线断开后,甲、乙两个物体做简谐运动时的振幅是相等的,A 、B 错;两物体在平衡位置时的速度最大,此时的动能等于弹簧刚释放时的弹性势能,所以甲、乙两个物体的最大动能是相等的,则质量大的速度小,所以C 正确,D 错误.【答案】 C题号 1 2 3 4 5 6 7 8 9 10答案 ACBADACBDACADD(T 2-T 1)R/T 17【答案】 C8【解析】 根据题意,由能量守恒可知12kx 2=mg (h +x ),其中k 为弹簧劲度系数,h 为物块下落处距O 点的高度,x 为弹簧压缩量.当x =x 0时,物块速度为0,则kx 0-mg =ma ,a =kx 0-mg m =kx 0m -g =2mg (h +x 0)mx 0-g =2g (h +x 0)x 0-g >g ,故正确答案为D.【答案】 D9【解析】 由题中条件可得单摆的周期为T =0.30.2s =1.5s ,由周期公式T =2πlg可得l=0.56m.【答案】 A10【解析】 当摆球释放后,动能增大,势能减小,当运动至B 点时动能最大,势能最小,然后继续摆动,动能减小,势能增大,到达C 点后动能为零,势能最大,整个过程中摆球只有重力做功,摆球的机械能守恒,综上可知只有D 项正确.【答案】 D机械振动(4)1解析:选A.周期与振幅无关,故A 正确.2解析:选C.由单摆周期公式T =2π lg知周期只与l 、g 有关,与m 和v 无关,周期不变频率不变.又因为没改变质量前,设单摆最低点与最高点高度差为h ,最低点速度为v ,mgh =12m v 2.质量改变后:4mgh ′=12·4m ·(v 2)2,可知h ′≠h ,振幅改变.故选C.3解析:选D.此摆为复合摆,周期等于摆长为L 的半个周期与摆长为L2的半个周期之和,故D 正确.4解析:选B.由简谐运动的对称性可知,t Ob =0.1 s ,t bc =0.1 s ,故T4=0.2 s ,解得T =0.8s ,f =1T=1.25 Hz ,选项B 正确.5解析:选D.当单摆A 振动起来后,单摆B 、C 做受迫振动,做受迫振动的物体的周期(或频率)等于驱动力的周期(或频率),选项A 错误而D 正确;当物体的固有频率等于驱动力的频率时,发生共振现象,选项C 正确而B 错误.6解析:选BD.速度越来越大,说明振子正在向平衡位置运动,位移变小,A 错B 对;速度与位移反向,C 错D 对.7解析:选AD.P 、N 两点表示摆球的位移大小相等,所以重力势能相等,A 对;P 点的速度大,所以动能大,故B 、C 错D 对.8解析:选BD.受迫振动的频率总等于驱动力的频率,D 正确;驱动力频率越接近固有频率,受迫振动的振幅越大,B 正确.9解析:选B.读图可知,该简谐运动的周期为4 s ,频率为0.25 Hz ,在10 s 内质点经过的路程是2.5×4A =20 cm.第4 s 末的速度最大.在t =1 s 和t =3 s 两时刻,质点位移大小相等、方向相反.。
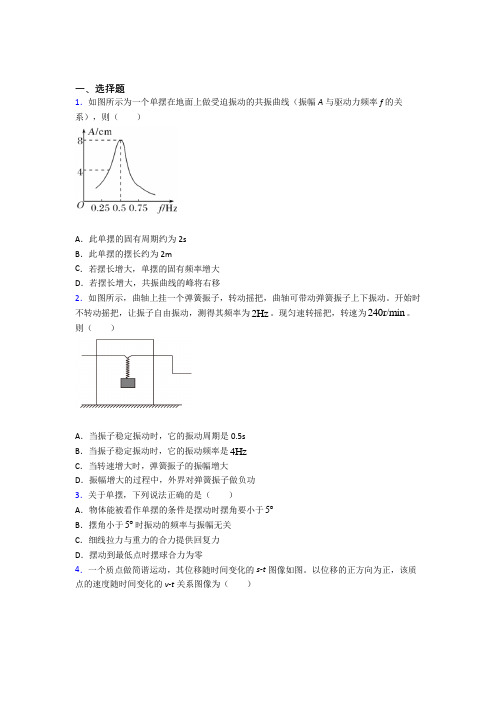
一、选择题1.如图所示为一个单摆在地面上做受迫振动的共振曲线(振幅A与驱动力频率f的关系),则()A.此单摆的固有周期约为2sB.此单摆的摆长约为2mC.若摆长增大,单摆的固有频率增大D.若摆长增大,共振曲线的峰将右移2.如图所示,曲轴上挂一个弹簧振子,转动摇把,曲轴可带动弹簧振子上下振动。
开始时不转动摇把,让振子自由振动,测得其频率为2Hz。
现匀速转摇把,转速为240r/min。
则()A.当振子稳定振动时,它的振动周期是0.5sB.当振子稳定振动时,它的振动频率是4HzC.当转速增大时,弹簧振子的振幅增大D.振幅增大的过程中,外界对弹簧振子做负功3.关于单摆,下列说法正确的是()A.物体能被看作单摆的条件是摆动时摆角要小于5︒B.摆角小于5︒时振动的频率与振幅无关C.细线拉力与重力的合力提供回复力D.摆动到最低点时摆球合力为零4.一个质点做简谐运动,其位移随时间变化的s-t图像如图。
以位移的正方向为正,该质点的速度随时间变化的v-t关系图像为()A.B.C.D.5.如图所示,弹簧振子在A、B之间做简谐运动.以平衡位置O为原点,建立Ox轴.向右为x轴的正方向.若振子位于B点时开始计时,则其振动图像为()A.B.C.D.6.某弹簧振子在水平方向上做简谐运动,其位移x随时间t变化的函数关系式为=,振动图像如图所示,下列说法不正确的是()sinx A tωA.弹簧在第1s末与第3s末的长度相同B .简谐运动的圆频率rad /s 4πω=C .第3s 末振子的位移大小为22A D .从第3s 末到第5s 末,振子的速度方向发生变化7.如图所示,质量为1m 的物体A 放置在质量为2m 的物体B 上,B 与弹簧相连,它们一起在光滑水平面上做简谐运动,振动过程中A 、B 之间无相对运动,设弹簧劲度系数为k ,当物体离开平衡位置的位移为x 时,A 受到的回复力的大小等于( )A .0B .kxC .121m kx m m +D .12m kx m 8.物体做简谐运动,其图像如图所示,在t 1和t 2两时刻,物体的( )A .回复力相同B .位移相同C .速度相同D .加速度相同9.如图所示,为某一弹簧振子做简谐运动的图像,由图可知( )A .t =0时,质点的速度为零B .t =0时,质点的加速度为零C .t =1s 与t =3s 时,质点位置相同D .t =1s 与t =3s 时,质点加速度相同 10.光滑水平面上的弹簧振子,以O 为平衡位置在A 、B 间做简谐运动,则下列说法中正确的是( )A .物体在 A 和B 处加速度为零 B .物体通过 O 点时,加速度的方向发生改变C .回复力的方向总跟物体的速度方向相反D .物体离开平衡位置 O 后的运动是匀减速运动11.如图所示,一个弹赞振子沿x 轴在B 、C 之间做简谐运动,O 是平衡位置,当振子从B 向O 点运动经过P 点时A.振子的位移为负B.振子受回复力为负C.振子速度为负D.振子的加速度为负12.甲、乙两个单摆在同一地点做简谐振动,在相等的时间内,甲完成10次全振动,乙完成20次全振动.已知甲摆摆长为1 m,则乙摆的摆长为( )A.2 m B.4 mC.0.5 m D.0.25 m13.做简谐运动的物体,下列说法正确的是A.当它每次经过同一位置时,位移可能不同B.当它每次经过同一位置时,速度可能不同C.在一次全振动中通过的路程不一定为振幅的四倍D.在四分之一周期内通过的路程一定为一倍的振幅14.如图,O点为弹簧振子的平衡位置,小球在B、C间做无摩擦的往复运动.若小球从C 点第一次运动到O点历时0.1s,则小球振动的周期为()A.0.1s B.0.2s C.0.3s D.0.4s15.如图为某质点沿x轴做简谐运动的图象,下列说法中正确的是()A.在t=4s时质点速度最大,加速度为0B.在t=1s时,质点速度和加速度都达到最大值C.在0到1s时间内,质点速度和加速度方向相同D.在t=2s时,质点的位移沿x轴负方向,加速度也沿x轴负方向二、填空题16.如图所示的弹簧振子,O为平衡位置,B、C为最大位移位置,以向右的方向为正方向,则振子从B运动到O的过程中,位移方向为________,大小逐渐________;回复力方向为________,大小逐渐________;振子速度方向为________,大小逐渐________;动能逐渐________;势能逐渐________。

机械振动试题(含答案)(2)一、机械振动 选择题1.下列说法中正确的有( )A .简谐运动的回复力是按效果命名的力B .振动图像描述的是振动质点的轨迹C .当驱动力的频率等于受迫振动系统的固有频率时,受迫振动的振幅最大D .两个简谐运动:x 1=4sin (100πt +3π) cm 和x 2=5sin (100πt +6π) cm ,它们的相位差恒定2.如图所示,质量为A m 的物块A 用不可伸长的细绳吊着,在A 的下方用弹簧连着质量为B m 的物块B ,开始时静止不动。
现在B 上施加一个竖直向下的力F ,缓慢拉动B 使之向下运动一段距离后静止,弹簧始终在弹性限度内,希望撤去力F 后,B 向上运动并能顶起A ,则力F 的最小值是( )A .(A m +B m )gB .(A m +2B m )gC .2(A m +B m )gD .(2A m +B m )g3.如图所示的单摆,摆球a 向右摆动到最低点时,恰好与一沿水平方向向左运动的粘性小球b 发生碰撞,并粘在一起,且摆动平面不便.已知碰撞前a 球摆动的最高点与最低点的高度差为h ,摆动的周期为T ,a 球质量是b 球质量的5倍,碰撞前a 球在最低点的速度是b 球速度的一半.则碰撞后A 56T B 65T C .摆球最高点与最低点的高度差为0.3hD .摆球最高点与最低点的高度差为0.25h4.如图所示,固定的光滑圆弧形轨道半径R =0.2m ,B 是轨道的最低点,在轨道上的A 点(弧AB 所对的圆心角小于10°)和轨道的圆心O 处各有一可视为质点的静止小球,若将它们同时由静止开始释放,则( )A .两小球同时到达B 点B .A 点释放的小球先到达B 点C .O 点释放的小球先到达B 点D .不能确定5.如图甲所示,一个单摆做小角度摆动,从某次摆球由左向右通过平衡位置时开始计时,相对平衡位置的位移x 随时间t 变化的图象如图乙所示.不计空气阻力,g 取10m/s 2.对于这个单摆的振动过程,下列说法中不正确的是( )A .单摆的位移x 随时间t 变化的关系式为8sin(π)cm x t =B .单摆的摆长约为1.0mC .从 2.5s t =到 3.0s t =的过程中,摆球的重力势能逐渐增大D .从 2.5s t =到 3.0s t =的过程中,摆球所受回复力逐渐减小6.图(甲)所示为以O 点为平衡位置、在A 、B 两点间做简谐运动的弹簧振子,图(乙)为这个弹簧振子的振动图象,由图可知下列说法中正确的是( )A .在t =0.2s 时,弹簧振子可能运动到B 位置B .在t =0.1s 与t =0.3s 两个时刻,弹簧振子的速度相同C .从t =0到t =0.2s 的时间内,弹簧振子的动能持续地增加D .在t =0.2s 与t =0.6s 两个时刻,弹簧振子的加速度相同7.如图所示,物块M 与m 叠放在一起,以O 为平衡位置,在ab 之间做简谐振动,两者始终保持相对静止,取向右为正方向,其振动的位移x 随时间t 的变化图像如图,则下列说法正确的是( )A .在1~2T t 时间内,物块m 的速度和所受摩擦力都沿负方向,且都在增大 B .从1t 时刻开始计时,接下来4T 内,两物块通过的路程为A C .在某段时间内,两物块速度增大时,加速度可能增大,也可能减小D .两物块运动到最大位移处时,若轻轻取走m ,则M 的振幅不变 8.装有一定量液体的玻璃管竖直漂浮在水中,水面足够大,如图甲所示。

机械振动考试题和答案一、单项选择题(每题2分,共20分)1. 简谐运动的振动周期与振幅无关,与()有关。
A. 质量B. 频率C. 弹簧常数D. 初始条件答案:C2. 阻尼振动中,振幅逐渐减小的原因是()。
A. 系统内部摩擦B. 外部阻力C. 系统内部摩擦和外部阻力D. 系统内部摩擦或外部阻力答案:C3. 两个简谐运动合成时,合成运动的频率等于()。
A. 两个简谐运动频率之和B. 两个简谐运动频率之差C. 两个简谐运动频率中较大的一个D. 两个简谐运动频率中较小的一个答案:D4. 受迫振动的频率与()有关。
A. 驱动力频率B. 系统固有频率C. 驱动力大小D. 系统阻尼系数答案:A5. 阻尼振动中,阻尼系数越大,振动周期()。
A. 越大B. 越小C. 不变D. 无法确定答案:B6. 受迫振动中,当驱动力频率接近系统固有频率时,会发生()。
A. 共振B. 反共振C. 振动增强D. 振动减弱答案:A7. 简谐运动的振动周期与()成正比。
B. 频率C. 弹簧常数D. 质量的平方根答案:D8. 阻尼振动中,阻尼系数越小,振动周期()。
A. 越大B. 越小C. 不变D. 无法确定答案:C9. 受迫振动中,当驱动力频率等于系统固有频率时,振动的振幅()。
A. 最小C. 不变D. 无法确定答案:B10. 简谐运动的振动周期与()无关。
A. 质量B. 频率C. 弹簧常数D. 初始条件答案:D二、多项选择题(每题3分,共15分)11. 简谐运动的振动周期与以下哪些因素有关?()A. 质量C. 弹簧常数D. 初始条件答案:AC12. 阻尼振动中,振幅逐渐减小的原因包括()。
A. 系统内部摩擦B. 外部阻力C. 系统内部摩擦和外部阻力D. 系统内部摩擦或外部阻力答案:CD13. 两个简谐运动合成时,合成运动的频率等于以下哪些选项?()A. 两个简谐运动频率之和B. 两个简谐运动频率之差C. 两个简谐运动频率中较大的一个D. 两个简谐运动频率中较小的一个答案:BD14. 受迫振动的频率与以下哪些因素有关?()A. 驱动力频率B. 系统固有频率C. 驱动力大小D. 系统阻尼系数答案:AB15. 阻尼振动中,阻尼系数越大,振动周期的变化情况是()。

一、填空题1、机械振动按不同情况进行分类大致可分成(线性振动)和非线性振动;确定性振动和(随机振动);(自由振动)和强迫振动。
2、周期运动的最简单形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。
3、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的激励无关。
4、简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。
5、工程上分析随机振动用(数学统计)方法,描述随机过程的最基本的数字特征包括均值、方差、(自相关函数)和(互相关函数)。
6、单位脉冲力激励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。
2、在离散系统中,弹性元件储存( 势能 ),惯性元件储存(动能),(阻尼)元件耗散能量。
4、叠加原理是分析(线性)系统的基础。
5、系统固有频率主要与系统的(刚度)和(质量)有关,与系统受到的激励无关。
6、系统的脉冲响应函数和(频响函数)函数是一对傅里叶变换对,和(传递函数)函数是一对拉普拉斯变换对。
7、机械振动是指机械或结构在平衡位置附近的(往复弹性)运动。
1.振动基本研究课题中的系统识别是指根据已知的激励和响应特性分析系统的性质,并可得到振动系统的全部参数。
(本小题2分)2.振动按激励情况可分为自由振动和强迫振动两类。
(本小题2分)。
3.图(a)所示n个弹簧串联的等效刚度=k∑=ni ik111;图(b)所示n个粘性阻尼串联的等效粘性阻尼系数=eC∑=ni ic111。
(本小题3分)(a)(b)题一 3 题图4.已知简谐振动的物体通过距离静平衡位置为cmx51=和cmx102=时的速度分别为scmx201=&和scmx82=&,则其振动周期=T 2.97s;振幅=A10.69cm。
(本小题4分)5.如图(a)所示扭转振动系统,等效为如图(b)所示以转角2ϕ描述系统运动的单自由度系统后,则系统的等效转动惯量=eqI221Ii I+,等效扭转刚度=teqk221ttkik+。

机械振动试题(含答案)(1)一、机械振动 选择题1.沿某一电场方向建立x 轴,电场仅分布在-d ≤x ≤d 的区间内,其电场场强与坐标x 的关系如图所示。
规定沿+x 轴方向为电场强度的正方向,x =0处电势为零。
一质量为m 、电荷量为+q 的带点粒子只在电场力作用下,沿x 轴做周期性运动。
以下说法正确的是( )A .粒子沿x 轴做简谐运动B .粒子在x =-d 处的电势能为12-qE 0d C .动能与电势能之和的最大值是qE 0d D .一个周期内,在x >0区域的运动时间t ≤20md qE 2.如图所示,甲、乙两物块在两根相同的弹簧和一根张紧的细线作用下静止在光滑水平面上,已知甲的质量小于乙的质量.当细线突然断开斤两物块都开始做简谐运动,在运动过程中( )A .甲的最大速度大于乙的最大速度B .甲的最大速度小于乙的最大速度C .甲的振幅大于乙的振幅D .甲的振幅小于乙的振幅3.如图所示,弹簧的一端固定,另一端与质量为2m 的物体B 相连,质量为1m 的物体A 放在B 上,212m m =.A 、B 两物体一起在光滑水平面上的N 、N '之间做简谐运动,运动过程中A 、B 之间无相对运动,O 是平衡位置.已知当两物体运动到N '时,弹簧的弹性势能为p E ,则它们由N '运动到O 的过程中,摩擦力对A 所做的功等于( )A .p EB .12p EC .13p E D .14p E 4.如图所示是扬声器纸盆中心做简谐运动的振动图象,下列判断正确的是A .t =2×10-3s 时刻纸盆中心的速度最大B .t =3×10-3s 时刻纸盆中心的加速度最大C .在0〜l×10-3s 之间纸盆中心的速度方向与加速度方向相同D .纸盆中心做简谐运动的方程为x =1.5×10-4cos50πt (m )5.如图1所示,轻弹簧上端固定,下端悬吊一个钢球,把钢球从平衡位置向下拉下一段距离A ,由静止释放。
一、填空题1、机械振动按不同情况进行分类大致可分成(线性振动)和非线性振动;确定性振动和(随机振动);(自由振动)和强迫振动。
2、周期运动的最简单形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。
3、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的激励无关。
4、简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。
5、工程上分析随机振动用(数学统计)方法,描述随机过程的最基本的数字特征包括均值、方差、(自相关函数)和(互相关函数)。
6、单位脉冲力激励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。
2、在离散系统中,弹性元件储存( 势能 ),惯性元件储存(动能 ),(阻尼 )元件耗散能量。
4、叠加原理是分析(线性 )系统的基础。
5、系统固有频率主要与系统的(刚度 )和(质量 )有关,与系统受到的激励无关。
6、系统的脉冲响应函数和(频响函数 )函数是一对傅里叶变换对,和(传递函数 )函数是一对拉普拉斯变换对。
7、机械振动是指机械或结构在平衡位置附近的(往复弹性 )运动。
1.振动基本研究课题中的系统识别是指 根据已知的激励和响应特性分析系统的性质,并可得到振动系统的全部参数。
(本小题2分)2.振动按激励情况可分为 自由振动 和 强迫振动 两类。
(本小题2分)。
3.图(a )所示n 个弹簧串联的等效刚度=k ∑=ni ik111;图(b )所示n 个粘性阻尼串联的等效粘性阻尼系数=e C ∑=ni ic 111。
(本小题3分)(a ) (b )题一 3 题图4.已知简谐振动的物体通过距离静平衡位置为cm x 51=和cm x 102=时的速度分别为s cm x 201= 和s cm x 82= ,则其振动周期=T 2.97s ;振幅=A 10.69cm 。
(本小题4分)5.如图(a )所示扭转振动系统,等效为如图(b )所示以转角2ϕ描述系统运动的单自由度系统后,则系统的等效转动惯量=eq I 221I i I +,等效扭转刚度=teq k 221t t k i k +。
物理机械振动考试题及答案一、单项选择题(每题3分,共30分)1. 简谐运动的振动周期与振幅无关,与以下哪个因素有关?A. 质量B. 弹簧常数C. 初始位移D. 初始速度答案:B2. 阻尼振动中,振幅逐渐减小的原因是:A. 摩擦力B. 重力C. 弹力D. 空气阻力答案:A3. 以下哪个量描述了简谐运动的振动快慢?A. 振幅B. 周期C. 频率D. 相位答案:C4. 两个简谐运动的合成,以下哪个条件可以产生拍现象?A. 频率相同B. 频率不同C. 振幅相同D. 相位相反答案:B5. 以下哪个量是矢量?A. 位移B. 速度C. 加速度D. 以上都是答案:D6. 单摆的周期与以下哪个因素无关?A. 摆长B. 摆球质量C. 重力加速度D. 摆角答案:B7. 以下哪个量描述了简谐运动的能量?A. 振幅C. 频率D. 相位答案:A8. 以下哪个因素会影响单摆的周期?A. 摆长B. 摆球质量C. 摆角D. 重力加速度答案:A9. 阻尼振动中,振幅减小到原来的1/e时,经过的时间为:A. 1/2TB. TC. 2T答案:C10. 以下哪个现象不是简谐运动?A. 弹簧振子B. 单摆C. 弹簧振子的振幅逐渐减小D. 单摆的振幅逐渐减小答案:C二、填空题(每题4分,共20分)11. 简谐运动的周期公式为:T = 2π√(____/k),其中m为质量,k为弹簧常数。
答案:m12. 单摆的周期公式为:T = 2π√(L/g),其中L为摆长,g为重力加速度。
答案:L13. 阻尼振动的振幅公式为:A(t) = A0 * e^(-γt),其中A0为初始振幅,γ为阻尼系数,t为时间。
答案:A014. 简谐运动的频率公式为:f = 1/T,其中T为周期。
答案:1/T15. 简谐运动的相位公式为:φ = ωt + φ0,其中ω为角频率,t 为时间,φ0为初始相位。
答案:ωt + φ0三、计算题(每题10分,共50分)16. 一个质量为2kg的物体,通过弹簧连接在墙上,弹簧的弹簧常数为100N/m。
第十一章《机械振动》检测题一、单选题(每小题只有一个正确答案)1.弹簧振子作简谐振动的周期是4 s,某时刻该振子的速度为v,要使该振子的速度变为-v,所需要的最短时间是( )A. 1 s B. 2 s C. 4 s D.无法确定2.小球做简谐运动,则下述说法正确的是( )A.小球所受的回复力大小与位移成正比,方向相同B.小球的加速度大小与位移成正比,方向相反C.小球的速度大小与位移成正比,方向相反D.小球速度的大小与位移成正比,方向可能相同也可能相反3.弹簧振子沿直线作简谐运动,当振子连续两次经过相同位置时下列说法不正确的( ) A.回复力相同 B.加速度相同 C.速度相同 D.机械能相同4.任何物体都有自己的固有频率.研究表明,如果把人作为一个整体来看,在水平方向上振动时的固有频率约为5 Hz.当工人操作风镐、风铲、铆钉机等振动机械时,操作者在水平方向将做受迫振动.在这种情况下,下列说法正确的是( )A.操作者的实际振动频率等于他自身的固有频率B.操作者的实际振动频率等于机械的振动频率C.为了保证操作者的安全,振动机械的频率应尽量接近人的固有频率D.为了保证操作者的安全,应尽量提高操作者的固有频率5.水平放置的弹簧振子先后以振幅A和2A振动,振子从左边最大位移处运动到右边最大位移处过程中的平均速度分别为v1和v2,则( )A.v1=2v2 B. 2v1=v2 C.v1=v2 D.v1=v26.如图所示为某质点在0~4 s内的振动图象,则( )A.质点在3 s末的位移为2 m B.质点在4 s末的位移为8 mC.质点在4 s内的路程为8 m D.质点在4 s内的路程为零7.如图所示是单摆做阻尼运动的位移—时间图线,下列说法中正确的是( )A.摆球在P与N时刻的势能相等 B.摆球在P与N时刻的动能相等C.摆球在P与N时刻的机械能相等 D.摆球在P时刻的机械能小于N时刻的机械能8.某同学在用单摆测重力加速度的实验中,用的摆球密度不均匀,无法确定重心位置,他第一次量得悬线长为L1,测得周期为T1,第二次量得悬线长为L2,测得周期为T2,根据上述数据,重力加速度g的值为( )A. B. C. D.无法判断9.如图所示为演示简谐振动的沙摆,已知摆长为l,沙筒的质量为m,沙子的质量为M,沙子逐渐下漏的过程中,摆的周期( )A.不变 B.先变大后变小 C.先变小后变大 D.逐渐变大10.关于简谐运动周期、频率、振幅说法正确的是( )A.振幅是矢量,方向是由平衡位置指向最大位移处B.周期和频率的乘积不一定等于1C.振幅增加,周期必然增加,而频率减小D.做简谐运动的物体,其频率固定,与振幅无关11.将一个电动传感器接到计算机上,就可以测量快速变化的力,用这种方法测得的某单摆摆动时悬线上拉力的大小随时间变化的曲线如图所示.某同学由此图线提供的信息做出了下列判断①t=0.2 s时摆球正经过最低点.②t=1.1 s时摆球正经过最低点.③摆球摆动过程中机械能减少.④摆球摆动的周期是T=0.6 s.上述判断中,正确的是( )A.①③ B.②③ C.③④ D.②④12.如图为某质点做简谐运动的图象.下列说法正确的是( )A.t=0时,质点的速度为零B.t=0.1 s时,质点具有y轴正向最大加速度C.在0.2 s~0.3 s内质点沿y轴负方向做加速度增大的加速运动D.在0.5 s~0.6 s内质点沿y轴负方向做加速度减小的加速运动13.如图所示,位于竖直平面内的固定光滑圆环轨道与水平面相切于M点,与竖直墙相切于A点,竖直墙上另一点B与M的连线和水平面的夹角为60°,C是圆环轨道的最高点,D是圆环上与M靠得很近的一点(DM远小于).已知在同一时刻:a、b两球分别由A、B两点从静止开始沿光滑倾斜直轨道运动到M点,c球由C点自由下落到M点,d球从D点静止出发沿圆环运动到M点.则下列关于四个小球运动时间的关系,正确的是( )A.tb>tc>ta>td B.td>tb>tc>ta C.tb>tc=ta>td D.td>tb=tc=ta14.如图所示,一轻弹簧上端固定,下端系在甲物体上,甲、乙间用一不可伸长的轻杆连接,已知甲、乙两物体质量均为m,且一起在竖直方向上做简谐振动的振幅为A(A>).若在振动到达最高点时剪断轻杆,甲单独振动的振幅为A1,若在振动到达最低点时间剪断轻杆,甲单独振动的振幅为A2.则( )A.A2>A>A1 B.A1>A>A2 C.A>A2>A1 D.A2>A1>A二、多选题(每小题至少有两个正确答案)15.利用传感器和计算机可以测量快速变化的力.如图是用这种方法获得的弹性绳中拉力随时间的变化图线.实验时,把小球举高到绳子的悬点O处,然后让小球自由下落.从此图线所提供的信息,判断以下说法中正确的是( )A.t1时刻小球速度最大 B.t2时刻绳子最长C.t3时刻小球动能最小 D.t3与t4时刻小球速度大小相同16.物体做简谐运动时,下列叙述正确的是( )A.平衡位置就是回复力为零的位置B.处于平衡位置的物体,一定处于平衡状态C.物体到达平衡位置,合力一定为零D.物体到达平衡位置,回复力一定为零17.在“探究单摆周期与摆长的关系”的实验中,以下说法正确的是( )A.测量摆长时,应用力拉紧摆线B.单摆偏离平衡位置的角度不能太大C.要保证单摆自始至终在同一竖直面内摆动D.应从摆球通过最低位置时开始计时18.(多选)如图所示为半径很大的光滑圆弧轨道上的一小段,小球B静止在圆弧轨道的最低点O处,另有一小球A自圆弧轨道上C处由静止滚下,经t秒与B发生正碰.碰后两球分别在这段圆弧轨道上运动而未离开轨道,当两球第二次相碰时( )A.相间隔的时间为4t B.相间隔的时间为2tC.将仍在O处相碰 D.可能在O点以外的其他地方相碰19.如图所示,物体A与滑块B一起在光滑水平面上做简谐运动,A、B之间无相对滑动,已知轻质弹簧的劲度系数为k,A、B的质量分别为m和M,下列说法正确的是( )A.物体A的回复力是由滑块B对物体A的摩擦力提供B.滑块B的回复力是由弹簧的弹力提供C.物体A与滑块B(看成一个振子)的回复力大小跟位移大小之比为kD.物体A的回复力大小跟位移大小之比为k E.若A、B之间的最大静摩擦因数为μ,则A、B间无相对滑动的最大振幅为三、实验题20.某同学做“用单摆测定重力加速度”的实验,实验步骤如下:Ⅰ.选取一个摆线长约1 m的单摆,把线的上端用铁夹固定在铁架台上,把铁架台放在实验桌边,使铁夹伸到桌面以外,让摆球自由下垂.Ⅱ.用米尺量出悬线长度,精确到毫米,作为摆长.Ⅲ.放开小球让它来回摆动,用停表测出单摆做30~50次全振动所用的时间,计算出平均摆动一次的时间.Ⅳ.变更摆长,重做几次实验,根据单摆的周期公式,计算出每次实验测得的重力加速度并求出平均值.(1)上述实验步骤有两点错误,请一一列举:Ⅰ.________________________________________________________________________;Ⅱ.________________________________________________________________________;(2)按正确的实验步骤,将单摆全部浸入水中做实验,测得的重力加速度变______.已知测得的单摆周期为T,摆长为L,摆球质量为m,所受浮力为F,当地的重力加速度的真实值g =____________.21.在探究单摆的振动周期T和摆长L的关系实验中,某同学在细线的一端扎上一个匀质圆柱体制成一个单摆.(1)如图,该同学把单摆挂在力传感器的挂钩上,使小球偏离平衡位置一小段距离后释放,电脑中记录拉力随时间变化的图象如图所示.在图中读出N个峰值之间的时间间隔为t,则重物的周期为____________.(2)为测量摆长,该同学用米尺测得摆线长为85.72 cm,又用游标卡尺测量出圆柱体的直径(如图甲)与高度(如图乙),由此可知此次实验单摆的摆长为______cm.(3)该同学改变摆长,多次测量,完成操作后得到了下表中所列实验数据.请在坐标系中画出相应图线(4)根据所画的周期T与摆长L间的关系图线,你能得到关于单摆的周期与摆长关系的哪些信息.四、计算题22.如图所示是一个质点做简谐运动的图象,根据图象回答下面的问题:(1)振动质点离开平衡位置的最大距离;(2)写出此振动质点的运动表达式;(3)在0~0.6 s的时间内质点通过的路程;(4)在t=0.1 s、0.3 s、0.5 s、0.7 s时质点的振动方向;(5)振动质点在0.6 s~0.8 s这段时间内速度和加速度是怎样变化的?(6)振动质点在0.4 s~0.8 s这段时间内的动能变化是多少?答案解析1.【答案】D【解析】要使该振子的速度变为-v,可能经过同一位置,也可能经过关于平衡位置对称的另外一点;由于该点与平衡位置的间距未知,故无法判断所需要的最短时间,故选D.2.【答案】B【解析】简谐运动的回复力与位移关系为:F=-kx,方向相反,A、C、D错;a=,所以加速度与位移成正比,方向相反,B正确.3.【答案】C【解析】弹簧振子在振动过程中,两次连续经过同一位置时,位移、加速度、回复力、动能、势能、速度的大小均是相同的.但速度的方向不同,故速度不同.故选C.4.【答案】B【解析】物体在周期性驱动力作用下做受迫振动,受迫振动的频率等于驱动力的频率,与固有频率无关,可知操作者的实际频率等于机械的振动频率,故A错误,B正确;当驱动力频率等于物体的固有频率时,物体的振幅最大,产生共振现象,所以为了保证操作者的安全,振动机械的频率应尽量远离人的固有频率,故C错误;有关部门作出规定:拖拉机、风镐、风铲、铆钉机等各类振动机械的工作频率必须大于20 Hz,操作者的固有频率无法提高,故D错误.5.【答案】B【解析】弹簧振子做简谐运动,周期与振幅无关,设为T,则从左边最大位移处运动到右边最大位移处所用的时间为;第一次位移为2A,第二次位移为4A,即位移之比为1∶2,根据平均速度的定义式=,平均速度之比为1∶2.6.【答案】C【解析】振动质点的位移指的是质点离开平衡位置的位移.位移是矢量,有大小,也有方向.因此3 s末的位移为-2 m,4 s末位移为零.路程是指质点运动的路径的长度,在4 s内应该是从平衡位置到最大位置这段距离的4倍,即为8 m,C正确.7.【答案】A【解析】由于摆球的势能大小由其位移和摆球质量共同决定,P、N两时刻位移大小相同,关于平衡位置对称,所以势能相等,A正确;由于系统机械能在减少,P、N时刻势能相同,则P处动能大于N处动能,故B、C、D错.8.【答案】B【解析】设摆球的重心到线与球结点的距离为r,根据单摆周期的公式T=2π得T1=2π;T2=2π;联立解得g=,故选B.9.【答案】B【解析】在沙摆摆动、沙子逐渐下漏的过程中,沙摆的重心逐渐下降,即摆长逐渐变大,当沙子流到一定程度后,摆的重心又重新上移,即摆长变小,由周期公式可知,沙摆的周期先变大后变小,故选B.10.【答案】D【解析】振幅是振动物体离开平衡位置的最大距离,是标量,A错;周期和频率互为倒数,B错;做简谐运动的物体的频率和周期由振动系统本身决定,C错误,D正确.11.【答案】A【解析】摆球经过最低点时,拉力最大,在0.2 s时,拉力最大,所以此时摆球经过最低点,故①正确;摆球经过最低点时,拉力最大,在1.1 s时,拉力最小,所以此时摆球不是经过最低点,是在最高点,故②错误;根据牛顿第二定律知,在最低点F-mg=m,则F=mg+m,在最低点的拉力逐渐减小,知是阻尼振动,机械能减小,故③正确;在一个周期内摆球两次经过最低点,根据图象知周期:T=2×(0.8 s-0.2 s)=1.2 s,故④错误.12.【答案】D【解析】由图可知,在t=0时,质点经过平衡位置,所以速度最大,故A错误;当t=0.1 s时,质点的位移为正向最大,速度为零,由加速度公式a=-y,知加速度负向最大.故B错误;在0.2 s时,质点经过平衡位置,0.3 s时质点的位移为负向最大,质点沿y轴负方向做加速度增大的减速运动,故C错误;在0.5 s时,质点的位移为正向最大,速度为零,0.6 s时,质点经过平衡位置,速度负向最大,可知在0.5 s~0.6 s内质点沿y轴负方向做加速度减小的加速运动,故D正确.13.【答案】C【解析】对于AM段,位移x1=R,加速度a1==g,根据x1=a1t得,t1=2.对于BM段,位移x2=2R,加速度a2=g sin 60°=g,根据x2=a2t得,t2=. 对于CM段,位移x3=2R,加速度a3=g,由x3=gt得,t3=2.对于D小球,做类单摆运动,t4==.故C正确.14.【答案】A【解析】未剪断轻杆时,甲、乙两物体经过平衡位置时,弹簧的伸长量为x0=;当剪断轻杆时,甲物体经过平衡位置时,弹簧的伸长量为x=,可知,平衡位置向上移动.则在振动到达最高点时剪断轻杆,A1<A;在振动到达最低点时间剪断轻杆,A2>A;所以有:A2>A>A1.15.【答案】BD【解析】把小球举高到绳子的悬点O处,让小球自由下落,t1时刻绳子刚好绷紧,此时小球所受的重力大于绳子的拉力,小球向下做加速运动,当绳子的拉力大于重力时,小球才开始做减速运动,所以t1时刻小球速度不是最大,故A错误;t2时刻绳子的拉力最大,小球运动到最低点,绳子也最长,故B正确;t3时刻与t1时刻小球的速度大小相等,方向相反,小球动能不是最小,应是t2时刻小球动能最小,故C错误;t3与t4时刻都与t1时刻小球速度大小相同,故D正确.16.【答案】AD【解析】平衡位置是回复力等于零的位置,但物体所受合力不一定为零,A、D对.17.【答案】BCD【解析】测量摆长时,要让摆球自然下垂,不能用力拉紧摆线,否则使测量的摆长产生较大的误差,故A错误.单摆偏离平衡位置的角度不能太大,否则单摆的振动不是简谐运动,故B正确.要保证单摆自始至终在同一竖直面内摆动,不能形成圆锥摆,故C正确.由于摆球经过最低点时速度最大,从摆球通过最低位置时开始计时,测量周期引起的误差最小,故D 正确.18.【答案】BC【解析】因为它是一个很大的光滑圆弧,可以当作一个单摆运动.所以AB球发生正碰后各自做单摆运动.T=2π,由题目可知A球下落的时间为t=T,由此可见周期与质量、速度等因素无关,所以碰后AB两球的周期相同,所以AB两球向上运动的时间和向下运动的时间都是一样的.所以要经过2t的时间,AB两球同时到达O处相碰.19.【答案】ACE【解析】A做简谐运动时的回复力是由滑块B对物体A的摩擦力提供,故A正确;物体B作简谐运动的回复力是弹簧的弹力和A对B的静摩擦力的合力提供,故B错误;物体A与滑块B(看成一个振子)的回复力大小满足F=-kx,则回复力大小跟位移大小之比为k,故C正确;设弹簧的形变量为x,根据牛顿第二定律得到整体的加速度为:a=,对A:F f=ma =,可见,作用在A上的静摩擦力大小F f,即回复力大小与位移大小之比为:,故D错误;据题知,物体间达到最大摩擦力时,其振幅最大,设为A.以整体为研究对象有:kA=(M+m)a,以A为研究对象,由牛顿第二定律得:μmg=ma,联立解得:A=,故E正确.20.【答案】(1)Ⅱ.测量摆球直径,摆长应为摆线长加摆球半径Ⅲ.在细线偏离竖直方向小于5°位置释放小球,经过最点时进行计时(2)小+【解析】(1)上述实验步骤有两点错误Ⅱ.测量摆球直径,摆长应为摆线长加摆球半径;Ⅲ.在细线偏离竖直方向小于5°位置释放小球,经过最点时进行计时.(2)按正确的实验步骤,将单摆全部浸入水中做实验,等效的重力加速度g′=,所以测得的重力加速度变小.已知测得的单摆周期为T,摆长为L,摆球质量为m,所受浮力为F,由单摆的周期公式得出T=2πg=+.21.【答案】(1)(2)88.10 (3)如图所示(4)摆长越长,周期越大,周期与摆长呈非线性关系【解析】(1)摆球做简谐运动,每次经过最低点时速度最大,此时绳子拉力最大,则两次到达拉力最大的时间为半个周期,所以t=(N-1)T解得:T=(2)图乙游标卡尺的主尺读数为47 mm,游标读数为0.1×5 mm=0.5 mm,则最终读数为47.5 mm=4.75 cm.所以圆柱体的高度为h=4.75 cm,摆长是悬点到球心的距离,则摆长l=85.72 cm+=88.10 cm(3)根据描点法作出图象,如图所示:(4)由图象可知,摆长越长,周期越大,周期与摆长呈非线性关系.22.【答案】(1)5 cm (2)x=5sin(2.5πt) cm(3)15 cm (4)正方向负方向负方向正方向(5)速度越来越大加速度的方向指向平衡位置越来越小(6)零【解析】(1)由振动图象可以看出,质点振动的振幅为5 cm,此即质点离开平衡位置的最大距离.(2)由图象可知A=5 cm,T=0.8 s,φ=0.所以x=A sin(ωt+φ)=A sin(t)=5sin(t) cm=5sin(2.5πt) cm.(3)由振动图象可以看出,质点振动的周期为T=0.8 s,0.6 s=3×,振动质点是从平衡位置开始振动的,故在0~0.6 s的时间内质点通过的路程为s=3×A=3×5 cm=15 cm.(4)在t=0.1 s时,振动质点处在位移为正值的某一位置上,但若从t=0.1 s起取一段极短的时间间隔Δt(Δt→0)的话,从图象中可以看出振动质点的正方向的位移将会越来越大,由此可以判断得出质点在t=0.1 s时的振动方向是沿题中所设的正方向的.同理可以判断得出质点在t=0.3 s、0.5 s、0.7 s时的振动方向分别是沿题中所设的负方向、负方向和正方向.(5)由振动图象可以看出,在0.6 s~0.8 s这段时间内,振动质点从最大位移处向平衡位置运动,故其速度是越来越大的;而质点所受的回复力是指向平衡位置的,并且逐渐减小的,故其加速度的方向指向平衡位置且越来越小.(6)由图象可以看出,在0.4 s~0.8 s这段时间内质点从平衡位置经过半个周期的运动又回到了平衡位置,尽管初、末两个时刻的速度方向相反,但大小是相等的,故这段时间内质点的动能变化为零.。
《机械振动》试卷答案(A)2011 - 2012学年上学期时间120分钟课程32 学时2.0 学分考试形式:开卷1、由一对带偏心质量的等速反向旋转齿轮构成的振动机械安装在弹簧和阻尼器构成的支承上,如图1所示。
当齿轮转动角速度为ω时,偏心质量惯性力在垂直方向大小为meω2 sinωt 。
已知偏心重W = 12.55 kg,偏心距e = 150 mm,支承弹簧总刚度系数k = 96.77N/mm,测得机器垂直方向共振振幅X m=10.7 mm,远离共振时垂直振幅趋近常值X0=3.2mm。
求支承阻尼器的阻尼比和偏心轮以300r/min运行时机器的垂直振幅。
图12、 试确定单自由度系统对图2所示抛物线力函数2201()/Q Q t t t =-的无阻尼响应。
1Q Q图2解,[]202111110121112sin 22(1)(1cos )()()(0)2sin 2cos cos ()cos ()()n n n n n n n n n n Q t t t x t k t t t t t t Q t x t t t t k t t t t ωωωωωωωωωω⎧⎡⎤=---++⎪⎢⎥⎣⎦⎪⎪≤≤⎪⎨⎧⎫⎪=---+⎨⎬⎪⎩⎭⎪⎪≥⎩3、 如图3所示系统,两小车质量分别为1m ,2m ,弹簧刚度分别为1k ,2k 。
在小车1上有偏心质量m ,偏心矩e ,以角速度ω旋转。
求系统对偏心扰动的稳态响应(x 方向)。
解,22221222121222222222121222()()()()()k m me x k k m m k m k k me x k k m m k m k ωωωωωωω-=⎡⎤+-+--⎣⎦=⎡⎤+-+--⎣⎦4、 如图4所示质量-弹簧系统,试确定系统的模态模型(特征值与特征向量),其中k1=6k ,k2=k ,M=4m 。
图4解,mk 21=ω,m k ===432ωωω,m k35=ω[]⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡----=20002113001112011111111111M X5、长为l 单位长度质量为ρl 的弦左端固定,右端连接在一质量弹簧系统的物块上,如图5 所示。
《机械振动》课程期终考试卷-答案————————————————————————————————作者:————————————————————————————————日期:一、填空题1、机械振动按不同情况进行分类大致可分成(线性振动)和非线性振动;确定性振动和(随机振动);(自由振动)和强迫振动。
2、周期运动的最简单形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。
3、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的激励无关。
4、简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。
5、工程上分析随机振动用(数学统计)方法,描述随机过程的最基本的数字特征包括均值、方差、(自相关函数)和(互相关函数)。
6、单位脉冲力激励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。
2、在离散系统中,弹性元件储存( 势能),惯性元件储存(动能),(阻尼)元件耗散能量。
4、叠加原理是分析(线性)系统的基础。
5、系统固有频率主要与系统的(刚度)和(质量)有关,与系统受到的激励无关。
6、系统的脉冲响应函数和(频响函数)函数是一对傅里叶变换对,和(传递函数)函数是一对拉普拉斯变换对。
7、机械振动是指机械或结构在平衡位置附近的(往复弹性)运动。
1.振动基本研究课题中的系统识别是指根据已知的激励和响应特性分析系统的性质,并可得到振动系统的全部参数。
(本小题2分)2.振动按激励情况可分为自由振动和强迫振动两类。
(本小题2分)。
3.图(a)所示n个弹簧串联的等效刚度=k∑=ni ik111;图(b)所示n个粘性阻尼串联的等效粘性阻尼系数=eC∑=ni ic111。
(本小题3分)(a)(b)题一 3 题图4.已知简谐振动的物体通过距离静平衡位置为cmx51=和cmx102=时的速度分别为scmx201=&和scmx82=&,则其振动周期=T 2.97s;振幅=A10.69cm。
(本小题4分)5.如图(a)所示扭转振动系统,等效为如图(b)所示以转角2ϕ描述系统运动的单自由度系统后,则系统的等效转动惯量=eqI221Ii I+,等效扭转刚度=teqk221ttkik+。
(本小题4分)题一 5 题图解:设两个齿轮的传动比为:21ϕϕ=i 系统的动能为:()222212222111212121ϕϕϕ&&&I i I I I E T +=+=系统的势能为:()222212222111212121ϕϕϕt t t t k i k k k U +=+= 等效系统的动能为:22221ϕ&eq T I E = 等效系统的势能为:22221ϕeq k U =令21T T E E =,可得等效转动惯量为:221I i I I eq += 令21U U =,可得等效转动惯量为:221t t teq k i k k +=6.已知某单自由度系统自由振动微分方程为⎪⎩⎪⎨⎧=-==+002)0( , )0(0x x x x x x n &&&&ω,则其自由振动的振幅为=A 2020⎪⎪⎭⎫ ⎝⎛+n x x ω&,初相角=ϕ00x x arctg n &ωπ+。
(本小题4分) 7.已知库仑阻尼产生的摩擦阻力N F d μ=,其中:N 为接触面正压力,μ为摩擦系数,则其等效粘性阻尼系数=e C ANn πωμ4。
(本小题2分) 8.积极隔振系数的物理意义为 隔振后传递到基础结构上合力的幅值与振源所产生激振力的幅值之比(力传递率);消极隔振系数的物理意义为隔振后系统上的绝对位移幅值与振源所产生的简谐振动振幅之比(绝对运动传递率)。
(本小题4分)9.多自由度振动系统微分方程可能存在惯性耦合、刚度耦合和黏性耦合三种耦合情况。
(本小题3分)二、简答题1、什么是机械振动?振动发生的内在原因是什么?外在原因是什么?答:机械振动是指机械或结构在它的静平衡位置附近的往复弹性运动。
振动发生的内在原因是机械或结构具有在振动时储存动能和势能,而且释放动能和势能并能使动能和势能相互转换的能力。
外在原因是由于外界对系统的激励或者作用。
2、从能量、运动、共振等角度简述阻尼对单自由度系统振动的影响。
答:从能量角度看,阻尼消耗系统的能力,使得单自由度系统的总机械能越来越小;从运动角度看,当阻尼比大于等于1时,系统不会产生振动,其中阻尼比为1的时候振幅衰减最快;当阻尼比小于1时,阻尼使得单自由度系统的振幅越来越小,固有频率降低,阻尼固有频率2d 1n ωωξ=-;共振的角度看,随着系统能力的增加、增幅和速度增加,阻尼消耗的能量也增加,当阻尼消耗能力与系统输入能量平衡时,系统的振幅不会再增加,因此在有阻尼系统的振幅并不会无限增加。
3、简述无阻尼多自由度系统振型的正交性。
答:属于不同固有频率的振型彼此以系统的质量和刚度矩阵为权正交。
其数学表达为:如果当sr≠时,s rωω≠,则必然有⎩⎨⎧==0}]{[}{0}]{[}{r Ts r T s u K u u M u 。
4、用数学变换方法求解振动问题的方法包括哪几种?有什么区别?答:有傅里叶变换方法和拉普拉斯变换方法两种。
前者要求系统初始时刻是静止的,即初始条件为零;后者则可以计入初始条件。
5、简述刚度矩阵[K]中元素k ij 的意义。
答:如果系统的第j 个自由度沿其坐标正方向有一个单位位移,其余各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i 个自由度上施加的外力就是kij 。
1、 简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。
答:实际阻尼是度量系统消耗能量的能力的物理量,阻尼系数c 是度量阻尼的量; 临界阻尼是c 2e n m ω=;阻尼比是/e c c ξ=2、 共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?答:共振是指系统的外加激励与系统的固有频率接近时发生的振动;共振过程中,外加激励的能量被系统吸收,系统的振幅逐渐加大。
3、 简述随机振动问题的求解方法,以及与周期振动问题求解的区别。
答:随机振动的振动规律只能用概率统计方法描述,因此,只能通过统计的方法了解激励和响应统计值之间的关系。
而周期振动可以通过方程的求解,由初始条件确定未来任意时刻系统的状态。
三、计算题(45分) 3.1、(12分)如图1所示的扭转系统。
系统由转动惯量I 、扭转刚度由K 1、K 2、K 3组成。
1)求串联刚度K 1与K 2的总刚度(3分)2)求扭转系统的总刚度(3分) 3) 求扭转系统的固有频率(6分)。
1)串联刚度K 1与K 2的总刚度:212112K K K K K +=2) 系统总刚度:12312K K K K K K =++3) 系统固有频率:12312K KKKKKI Iω++== (也可用能量法,求得系统运动方程,即可得其固有频率)3.2、(14分)如图所示,轮子可绕水平轴转动,对转轴的转动惯量为I,轮缘绕有软绳,下端挂有重量为P的物体,绳与轮缘之间无滑动。
在图示位置,由水平弹簧维持平衡。
半径R与a均已知。
1)写出系统的动能函数和势能函数;(5分)2) 求系统的运动方程;(4分)2)求出系统的固有频率。
(5分)解:取轮的转角θ为坐标,顺时针为正,系统平衡时0θ=,则当轮子有θ转角时,系统有:θθθ=+=+&&&2222111()()222TP PE I R I Rg gθ=21()2U k a由()0Td E U+=可知:θθ++=&&222()0PI R kag即:ω=+22nkaPI Rg(rad/s),故ππω+==2222nPI RgTka(s)3.3、(19分)图2所示为3自由度无阻尼振动系统,1234t t t tk k k k k====,123/5I I I I===。
1)求系统的质量矩阵和刚度矩阵和频率方程;(6分)2)求出固有频率;(7分)3)求系统的振型,并做图。
(6分)解:1)以静平衡位置为原点,设123,,I I I的位移123,,θθθ为广义坐标,画出123,,I I I隔离体,根据牛顿第二定律得到运动微分方程:1111212222213233333243()0()()0()0θθθθθθθθθθθθθ⎧++-=⎪+-+-=⎨⎪+-+=⎩&&&&&&t tt tt tI k kI k kI k k所以:[][]12312222333340010000040;0000102101210012t t t t t t t t t t I M I I I k k k K k k k k k k k k ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦+--⎡⎤⎡⎤⎢⎥⎢⎥=-+-=--⎢⎥⎢⎥⎢⎥⎢⎥-+-⎣⎦⎣⎦系统运动微分方程可写为:[][]1122330θθθθθθ⎧⎫⎧⎫⎪⎪⎪⎪+=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎩⎭&&&&&&M K ………… (a) 或者采用能量法:系统的动能和势能分别为222112233111222T E I I I θθθ=++&&& 222211212323431111()()2222t t t t U k k k k θθθθθθ=+-+-+ 222121232343212323111()()()222t t t t t t t t k k k k k k k k θθθθθθθ=+++++--求偏导也可以得到[][],M K 。
2)设系统固有振动的解为:112233cos θθωθ⎧⎫⎧⎫⎪⎪⎪⎪=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎩⎭u u t u ,代入(a )可得:[][]1223()0u K M u u ω⎧⎫⎪⎪-=⎨⎬⎪⎪⎩⎭………… (b)得到频率方程:222220()24002k Ik kk I k kk Iωωωω--=---=--V即:222422()(2)(4102)0k I I kI k ωωωω=--+=V 解得:2517()4k I ω±=和22ω=k I所以:123517517()2()44k k k ImIωωω-+=<=<= ………… (c)将(c )代入(b )可得:1235172()045172()40451702()4k k I kI u kk k I k u I u k kk I I ⎡⎤±--⎢⎥⎢⎥⎧⎫⎢⎥±⎪⎪---=⎢⎥⎨⎬⎢⎥⎪⎪⎩⎭⎢⎥±--⎢⎥⎢⎥⎣⎦g g g和1232202240022k k I k I u kk k Iku Iu k kk I I ⎡⎤--⎢⎥⎧⎫⎢⎥⎪⎪⎢⎥---=⎨⎬⎢⎥⎪⎪⎢⎥⎩⎭⎢⎥--⎢⎥⎣⎦g g g 解得: 112131::1:1.78:1u u u ≈;(或 112131317::1::14u u u -≈) 122232::1:0:1u u u ≈-; 132333::1:0.28:1u u u ≈-;(或or 112131317::1::14u u u +≈)系统的三阶振型如图:3.1、(14分)如图所示中,两个摩擦轮可分别绕水平轴O 1,O 2转动,无相对滑动;摩擦轮的半径、质量、转动惯量分别为r 1、m 1、I 1和r 2、m 2、I 2。