机械运动方案创新设计
- 格式:ppt
- 大小:3.28 MB
- 文档页数:53
机械运动方案及机构创新设计
一、背景
注射器是一种用于注射药物的医疗器械,它能够有效地把药物注入患
者的体内,因此在医疗中十分重要。
传统注射器办法主要是手动操作的,
由于操作不熟练,容易造成注射量的误差,严重影响治疗效果。
因此,将
注射器的操作过程改为自动挡模式,成为近年来研究热点之一
二、机械运动方案
1.机构设计
采用该方案的射针机构,机构由漏斗、针尖器及轴承支撑立柱三部分
组成。
其中,漏斗主要用于装载药物,同时也是用于支撑的结构部分;针
尖器主要用于控制射针运动;立柱采用轴承支撑以加强稳定性。
2.移动端设计
采用该方案的移动端,由电机、减速机、内、外齿轮、链条轴承组成。
电机作为动力源,通过减速机将高速运动的动力转换为低速运动,然后再
转移到内、外齿轮上,通过链条轴承将低速运动传递给射针机构,以控制
射针的运动。
1.射针机构设计
采用该设计的射针机构,漏斗内部多加入一个推杆机构,与漏斗下方
的针尖器共同,形成一个滑动机构,漏斗内装载药物,药物通过推杆机构
推动针尖器向前面射出。
机械运动方案创新设计引言机械运动方案的创新设计是指通过应用新颖的思维和技术手段,提出新的机械运动方案。
这种创新设计可以改进现有机械系统的性能,提高生产效率,降低能耗,并为未来的机械运动系统提供更好的设计参考。
本文将介绍一种创新的机械运动方案,并讨论其优势和应用领域。
设计原理1. 理解机械运动方案在设计新的机械运动方案之前,首先需要对机械运动方案有一个清晰的理解。
机械运动方案是指控制机械装置的运动、位置和速度的方法和措施。
它可以包括各种机械元件的组合、驱动方式、传动装置以及控制系统等。
2. 创新设计的目标创新设计的目标是提出一种能够改进现有机械系统性能的机械运动方案。
这可能包括提高运动的精度、速度和稳定性,减少能耗和噪音,提高系统的可靠性和操作性,等等。
3. 基于新技术的创新设计创新设计需要基于新技术的应用。
例如,可以利用计算机辅助设计(CAD)软件进行机械元件的设计和模拟分析,以提高系统的设计效率和准确性。
同时,可以利用电子控制技术和传感器技术来实现对机械运动的精确控制和监测。
创新设计案例和应用领域1. 基于磁悬浮技术的创新设计一种创新的机械运动方案是基于磁悬浮技术的设计。
磁悬浮技术可以通过电磁力和磁场对物体进行悬浮和稳定控制。
这种技术可以应用于高速列车、磁悬浮飞行器、风力发电机等领域。
通过利用磁悬浮技术,可以降低机械磨损、减少能耗,提高系统运行的稳定性和效率。
2. 基于机器学习的创新设计另一种创新的机械运动方案是基于机器学习的设计。
机器学习是一种人工智能技术,通过对大量数据进行分析和学习,从中发现规律并作出决策。
利用机器学习技术可以对机械运动进行精确的预测和控制,提高系统的自适应性和智能化。
例如,可以利用机器学习技术对机械装置的故障进行预测和预防,提高系统的可靠性和安全性。
3. 基于虚拟现实的创新设计虚拟现实技术是一种将计算机生成的三维图像与现实世界进行交互的技术。
利用虚拟现实技术,可以将机械运动方案进行模拟和仿真,从而提前发现系统设计中的问题,并通过虚拟现实技术进行优化。
机械运动方案创新设计实验报告摘要:本实验旨在进行机械运动方案的创新设计,并通过实验验证其性能。
首先,通过研究已有的机械运动方案,分析其优缺点。
然后,基于创新设计思路,提出新的机械运动方案,并进行设计制造。
最后,通过实验测试其运动性能,并与传统方案进行比较分析。
1.引言2.方案分析通过研究已有的机械运动方案,我们发现传统方案存在以下问题:(1)运动效率低;(2)结构复杂,制造成本高;(3)部分方案存在安全隐患。
基于对这些问题的分析,我们提出了以下创新设计思路:(1)增加传动比,提高运动效率;(2)简化结构,降低制造成本;(3)增加安全措施,提高安全性。
3.方案设计基于上述创新设计思路,我们设计了一种新的机械运动方案。
具体设计如下:(1)采用新型传动装置,增加传动比,提高运动效率;(2)简化结构,减少部件数量和连接点,降低制造成本;(3)增加防护装置和安全传感器,提高安全性。
4.制造与装配根据设计方案,我们制造了相应的零部件,并进行了装配。
在制造过程中,我们严格控制了尺寸和表面质量,以确保装配的准确性和稳定性。
5.实验测试我们对新设计的机械运动方案进行了实验测试,并与传统方案进行了比较。
实验主要包括以下内容:(1)运动速度测试;(2)运动效率测试;(3)安全性测试。
6.结果与讨论通过实验测试,我们得到了以下结果:(1)新设计的机械运动方案比传统方案具有更高的运动速度;(2)新方案的运动效率显著提高,相比传统方案,节省了一定的能源消耗;(3)新方案的安全性能显著提高,有效避免了传统方案的安全隐患。
7.结论本实验通过创新设计一种新的机械运动方案,并通过实验验证了其性能。
实验结果表明,新方案具有较高的运动速度、较高的运动效率和良好的安全性能。
该实验可为机械运动方案的设计和优化提供参考。
9.致谢感谢实验室的老师和同学对本实验的支持和帮助,在实验过程中给予了我们很多宝贵的建议和指导。
机械运动方案创新设计实验一、实验目的1.加深对平面连杆机构及其设计的理解。
2. 初步了解机构设计的基本原理及各连杆机构的运动特性。
3.学会用实验的方法进行机构运动及结构分析。
4. 培养学生创新意识及综合设计能力。
二、实验原理平面连杆机构由原动件、连杆和从动件组成。
原动件输出运动和动力,通过连杆实现从动件的输出,达到运动方式的转换和对外做功。
三、实验设备及工具1.ZBS-C机构运动创新设计实验台2. 工具:外六角扳手(2把),内六角扳手(1个),钢尺(1个),十字起(1把)一字起(1把)四、实验步骤1,,每位同学根据自己所做的机构设计简图到零件库中选取相应的零件。
2,按工序号找到相对应的试验台架号,按图组装机构3,组装完毕后让其运转,检验是否运转自如,能否满足自己的设计要求。
4,机构运动正常后,测量并记录该机构的实际尺寸,回去后完成实验报告。
五、实验报告要求1.根据对机构的工艺要求,设计拼接机构的运动链结构图,计算机构的自由度;2.按比例绘制搭接机构的运动简图,标注出机构的运动简图的尺寸参数;3.说明该机构是否满足给定的工艺要求;4.分析该机构的优缺点?要求:在预习报告中确定设计方案。
绘制机构运动链结构图。
附录:机构的尺寸及数量。
实验步骤1,,每位同学根据自己所做的机构设计简图到零件库中选取相应的零件。
2,按工序号找到相对应的试验台架号,按图组装机构3,组装完毕后让其运转,检验是否运转自如,能否满足自己的设计要求。
4,机构运动正常后,测量并记录该机构的实际尺寸,回去后完成实验报告。
机械运动方案创新设计实验一、实验目的1.加深对机构设计原理的认识,进一步了解并掌握机构的组成及其运动特性。
2. 熟悉ZBS-C机构运动创新实验台运动副的拼接方法。
3.要求学生灵活应用以下几种机构构型的创新设计方法,创造性的设计、拼接机构及机构系统。
4.培养学生创新意识及综合设计能力。
二、实验原理根据机构运动的可能性及确定性条件设计机构运动方案,运用转动副、移动副及连杆搭接各类机构及机构系统。
机构组成:平面连杆机构包括原动件、连杆和从动件,机构功能:是指机构实现运动变换和完成某种功用的能力,常用机构的执行机构的运动形式有回转运动、直线运动和曲线运动。
在平面连杆机构中,当原动件以相同的方式运动时,如果改变构件的相对长度,便可使从动件得到不同的运动规律。
三、实验内容1.多功能移动式残病人浴缸翻转机构⑴上身部缸体翻转机构要求上身部缸体从水平位置向上翻转至70度,即翻转角为0-70度.可采用的机构:①摆动导杆机构,导杆与上身部缸体固装在-起,带动缸体翻转。
由直线电机带动主动杆摆动。
②双摇杆机构,上身部缸体作为从动摇杆,在主动摇杆驱动下作0-70度摆动. 主动杆由直线电机带动摆动。
③其它机构⑵腿部缸体翻转机构要求腿部缸体从垂直位置向上翻转至水平位置,利用死点保持腿部缸体在水平位置,借助凸轮机构破坏死点,使腿部缸体在重力作用下复位。
可采用机构:①双摇杆机构,腿部缸体作为主动摇杆;②其它机构2. 牛头创床机构要求刨刀(安装在滑枕上)作直线往复运动。
可采用的机构:①转动导杆机构和曲柄滑块机构组合,由电机驱动主动件转动。
(P31)②摆动导杆机构和滑块机构组合,由电机驱动主动件转动。
③其它机构3.翻转机要求翻转模板装在连杆上,模板翻转180度。
①四杆机构,电机驱动。
②其它机构4.飞机起落架要求起落架上轮子从水平位置向下翻转至垂直位置,利用死点使起落架轮子保持在垂直位置。
可采用的机构:①四杆机构,电机驱动。
②其它机构5.插床机构要求插刀作垂直上下往复直线运动,向下时(工作行程)较慢,向上运动(空程)时速度较快。
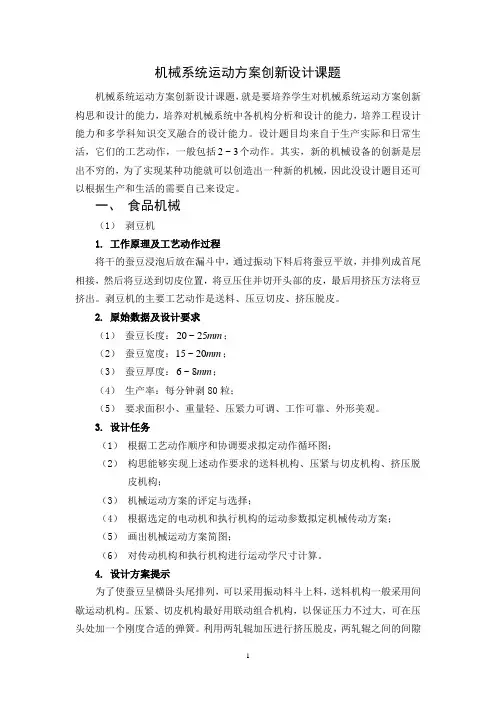
机械系统运动方案创新设计课题机械系统运动方案创新设计课题,就是要培养学生对机械系统运动方案创新构思和设计的能力,培养对机械系统中各机构分析和设计的能力,培养工程设计能力和多学科知识交叉融合的设计能力。
设计题目均来自于生产实际和日常生活,它们的工艺动作,一般包括3~2个动作。
其实,新的机械设备的创新是层出不穷的,为了实现某种功能就可以创造出一种新的机械,因此没设计题目还可以根据生产和生活的需要自己来设定。
一、食品机械(1)剥豆机1.工作原理及工艺动作过程将干的蚕豆浸泡后放在漏斗中,通过振动下料后将蚕豆平放,并排列成首尾相接,然后将豆送到切皮位置,将豆压住并切开头部的皮,最后用挤压方法将豆挤出。
剥豆机的主要工艺动作是送料、压豆切皮、挤压脱皮。
2.原始数据及设计要求(1)蚕豆长度:mm20;25~(2)蚕豆宽度:mm2015;~(3)蚕豆厚度:mm6;8~(4)生产率:每分钟剥80粒;(5)要求面积小、重量轻、压紧力可调、工作可靠、外形美观。
3.设计任务(1)根据工艺动作顺序和协调要求拟定动作循环图;(2)构思能够实现上述动作要求的送料机构、压紧与切皮机构、挤压脱皮机构;(3)机械运动方案的评定与选择;(4)根据选定的电动机和执行机构的运动参数拟定机械传动方案;(5)画出机械运动方案简图;(6)对传动机构和执行机构进行运动学尺寸计算。
4.设计方案提示为了使蚕豆呈横卧头尾排列,可以采用振动料斗上料,送料机构一般采用间歇运动机构。
压紧、切皮机构最好用联动组合机构,以保证压力不过大,可在压头处加一个刚度合适的弹簧。
利用两轧辊加压进行挤压脱皮,两轧辊之间的间隙一般比蚕豆的最小厚度略小。
(二)糕点切片机1.工作原理及工艺动作过程糕点先成形(如长方体、圆柱体),经切片后再烘干。
糕点切片机要求实现两个执行动作:糕点的直线间歇移动和切刀的往复运动。
通过两者的动作配合进行切片,改变直线间歇移动速度或每次间歇运动的距离,以满足糕点不同切片厚度的需要。
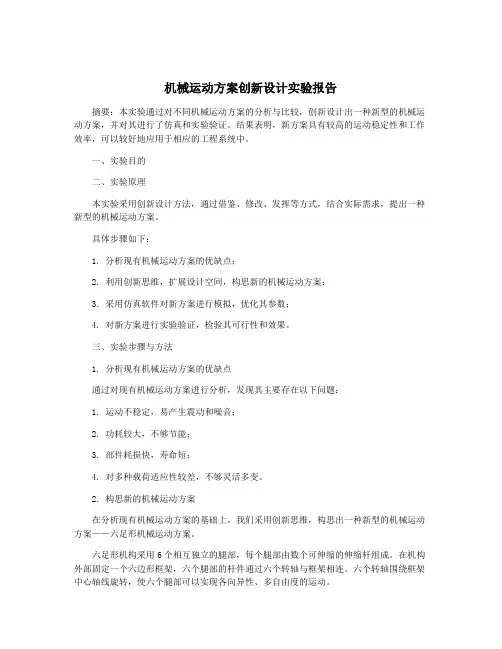
机械运动方案创新设计实验报告摘要:本实验通过对不同机械运动方案的分析与比较,创新设计出一种新型的机械运动方案,并对其进行了仿真和实验验证。
结果表明,新方案具有较高的运动稳定性和工作效率,可以较好地应用于相应的工程系统中。
一、实验目的二、实验原理本实验采用创新设计方法,通过借鉴、修改、发挥等方式,结合实际需求,提出一种新型的机械运动方案。
具体步骤如下:1. 分析现有机械运动方案的优缺点;2. 利用创新思维,扩展设计空间,构思新的机械运动方案;3. 采用仿真软件对新方案进行模拟,优化其参数;4. 对新方案进行实验验证,检验其可行性和效果。
三、实验步骤与方法1. 分析现有机械运动方案的优缺点通过对现有机械运动方案进行分析,发现其主要存在以下问题:1. 运动不稳定,易产生震动和噪音;2. 功耗较大,不够节能;3. 部件耗损快,寿命短;4. 对多种载荷适应性较差,不够灵活多变。
2. 构思新的机械运动方案在分析现有机械运动方案的基础上,我们采用创新思维,构思出一种新型的机械运动方案——六足形机械运动方案。
六足形机构采用6个相互独立的腿部,每个腿部由数个可伸缩的伸缩杆组成。
在机构外部固定一个六边形框架,六个腿部的杆件通过六个转轴与框架相连。
六个转轴围绕框架中心轴线旋转,使六个腿部可以实现各向异性、多自由度的运动。
3. 仿真优化采用SolidWorks软件,对六足形机构进行三维建模,并进行运动仿真。
通过调整机构参数,优化其运动轨迹,提高其运动稳定性和工作效率。
4. 实验验证将六足形机构制作出来,并对其进行实验验证。
在不同载荷下,测试其运动性能和工作效果,检验其可行性和优越性。
四、实验结果与分析通过对六足形机构的仿真和实验验证,得出以下结果:1. 六足形机构运动稳定,无震动和噪音,工作效率高;2. 六足形机构功耗小,节能效果显著;3. 六足形机构部件耗损慢,寿命长;4. 六足形机构适应性强,能适应不同载荷和工作环境。
机械运动创意方案拼接实验引言机械运动创意方案的设计和实现一直是工程师们关注的重点。
为了探索不同创意方案的运动效果,拼接实验成为了一种常见的方法。
本文将介绍一种基于拼接实验的机械运动创意方案实现过程,并探讨其运动效果。
实验设备和材料- 1个小型木制装置- 1个直流电机- 1个齿轮组件- 1个摆杆- 1个弹簧- 1个传动带实验步骤1. 设计和制作小型木制装置首先,我们设计并制作了一个小型的木制装置,用于支撑和固定后续的机械组件。
这个装置可以是简单的木板结构,但需要足够稳固和坚固,能够承受后续的运动力。
2. 安装直流电机和齿轮组件接下来,我们安装了一个直流电机和一个齿轮组件在木制装置上。
这个电机将提供动力,而齿轮组件可以将电机的转动动力传递给其他零件。
3. 运动链组件的连接接下来,我们开始连接运动链组件。
我们选择了一个摆杆和一个弹簧作为连接器。
摆杆可以在运动中产生摆动效果,而弹簧可以提供回弹力。
4. 传动带的安装最后,我们安装了一个传动带在齿轮组件上。
传动带可以将电机的转动动力传递给摆杆,并产生激动人心的运动效果。
实验效果与分析经过实验,我们成功实现了一个基于拼接实验的机械运动创意方案。
在启动电机后,齿轮组件开始运动,运动的动力通过传动带传递给摆杆。
随着传动带的运动,摆杆开始摆动,并通过连接的弹簧回弹。
这种运动效果既有节奏感,又具有探索性,给人带来了一种娱乐和探索的体验。
在实验过程中,我们观察到了几个有趣的现象。
首先,摆杆的摆动幅度和频率与电机的转速和传动带的松紧程度有关。
调整这些参数,可以改变运动的速度和效果。
其次,弹簧的刚度对回弹力有着很大的影响。
如果弹簧刚度过大,摆杆可能会因回弹力过大而失去节奏感;而如果弹簧刚度过小,摆杆可能会停止回弹。
总结通过拼接实验,我们成功实现了一个基于木制装置、直流电机、齿轮组件、摆杆、弹簧和传动带的机械运动创意方案。
通过观察和调整实验参数,我们得出了一些关于机械运动创意方案设计的经验和结论。
机械运动方案及机构的创新设计一、引言机械运动是现代工程中的一项基础性任务,广泛应用于各个领域,如制造业、航空航天、汽车工程、医疗设备等。
而机械运动方案的创新设计,对于提高工程的效率、降低成本、增强产品的竞争力具有重要意义。
本文将从创新思路、机构设计和实例应用三个方面,探讨机械运动方案及机构的创新设计。
二、创新思路1.多学科交叉融合:机械运动方案的创新设计需要多学科的综合应用,如机械工程、电子工程、材料科学等,通过不同学科的结合,可以获得更为丰富的创新思路。
2.充分利用信息技术:信息技术的快速发展为机械运动方案的创新提供了新的思路和手段,如基于计算机模拟的仿真设计、智能控制系统等,能够提高设计效率和准确性。
3.绿色环保意识:在机械运动方案设计中,应充分考虑绿色环保的要求,如减小能耗、降低噪音、减少污染等,这也是当前社会发展的趋势和目标。
三、机构设计1.驱动系统设计:驱动系统是机械运动的核心,其设计应兼顾效率和可靠性。
可采用新型的传动方式,如减速器、液压传动、电动传动等,以提高效率和减小体积。
2.结构设备创新:结构设备的创新是机械运动方案设计的重要组成部分。
通过改变结构和材料的组合方式,可以实现轻量化和强度提升的目标。
同时,也可以考虑采用可拆卸的结构,方便维护和更换。
3.运动控制系统设计:运动控制系统是实现机械运动方案的关键,其设计应考虑运动轨迹控制、力与位置的控制等问题。
可以采用精确的位置传感器、智能控制算法等技术,以实现更加精确和高效的运动控制。
四、实例应用1.机械手臂创新设计:机械手臂广泛应用于装配线、物流仓储等领域,其创新设计可以改善操作效率和安全性。
可以采用新型的执行器和控制算法,实现更为精准和灵活的运动控制。
2.机械传动系统创新设计:机械传动系统是许多机械运动的核心,其创新设计可以提高效率和可靠性。
可以利用新型的材料和结构设计,实现更高的变速比和传动效率。
3.智能运动控制系统创新设计:智能运动控制系统可以根据实际需求,自动调整运动轨迹和力度,提高运动的效率和质量。