弹性力学极坐标求解
- 格式:ppt
- 大小:942.00 KB
- 文档页数:78
第七章 平面问题的极坐标解知识点极坐标下的应力分量 极坐标下的应变分量 极坐标系的 Laplace 算符 轴对称应力分量 轴对称位移和应力表达式 曲梁纯弯曲 纯弯曲位移与平面假设 带圆孔平板拉伸问题 楔形体问题的应力函数 楔形体应力 楔形体受集中力偶作用、内容介绍在弹性力学问题的处理时,坐标系的选择从本质上讲并不影响问题的求解, 但是坐标的选取直接影响边界条件的描述形式,从而关系到问题求解的难易程 度。
对于圆形,楔形,扇形等工程构件,采用极坐标系统求解将比直角坐标系统 要方便的多。
本章的任务就是推导极坐标表示的弹性力学平面问题基本方程, 且求解一些典型问题。
极坐标平衡微分方程 几何方程的极坐标表达 应力函数 轴对称位移 厚壁圆筒作用均匀压力 曲梁弯曲应力 曲梁作用径向集中力 孔口应力 楔形体边界条件 半无限平面作用集中力二、重点1、基本未知量和基本方程的极坐标形式;2、双调和方程的极坐标形式;3、轴对称应力与厚壁圆筒应力;4、曲梁纯弯曲、楔形体和圆孔等典型问题§7.1平面问题极坐标解的基本方程学习思路:选取极坐标系处理弹性力学平面问题,首先必须将弹性力学的基本方程以及边界条件通过极坐标形式描述和表达。
本节的主要工作是介绍基本物理量,包括位移、应力和应变的极坐标形式;并且将基本方程,包括平衡微分方程、几何方程和本构关系转化为极坐标形式。
由于仍然采用应力解法,因此应力函数的极坐标表达是必要的。
应该注意的是坐标系的选取与问题求解性质无关,因此弹性力学直角坐标解的基本概念仍然适用于极坐标。
学习要点:1、极坐标下的应力分量;2、极坐标平衡微分方程;3、极坐标下的应变分量;4、几何方程的极坐标表达;5、本构方程的极坐标表达;6极坐标系的LaPIaCe算符;7、应力函数。
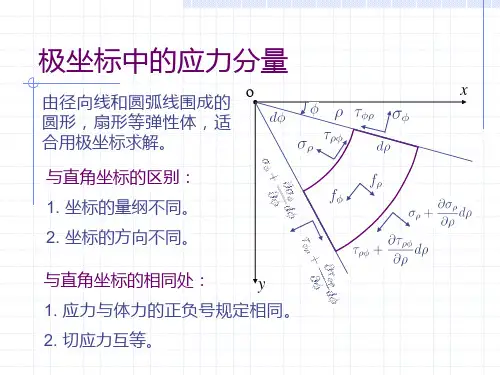
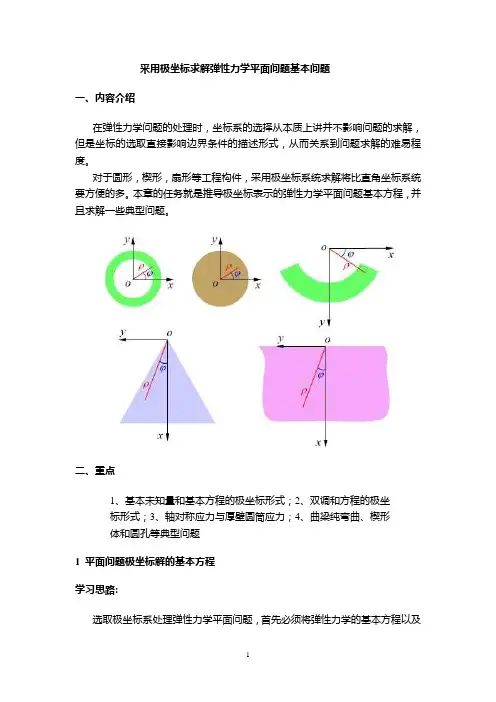
1、极坐标下的应力分量为了表明极坐标系统中的应力分量,从考察的平面物体中分割出微分单元体ABCD ,其由两个相距茁的圆柱面和互成d「的两个径向面构成,如图所示在极坐标系中,用二表示径向正应力,用二表示环向正应力,「,和•二:分别表示圆柱面和径向面的切应力,根据切应力互等定理,.J=.二:。

采用极坐标求解弹性力学平面问题基本问题一、内容介绍在弹性力学问题的处理时,坐标系的选择从本质上讲并不影响问题的求解,但是坐标的选取直接影响边界条件的描述形式,从而关系到问题求解的难易程度。
对于圆形,楔形,扇形等工程构件,采用极坐标系统求解将比直角坐标系统要方便的多。
本章的任务就是推导极坐标表示的弹性力学平面问题基本方程,并且求解一些典型问题。
二、重点1、基本未知量和基本方程的极坐标形式;2、双调和方程的极坐标形式;3、轴对称应力与厚壁圆筒应力;4、曲梁纯弯曲、楔形体和圆孔等典型问题1 平面问题极坐标解的基本方程学习思路:选取极坐标系处理弹性力学平面问题,首先必须将弹性力学的基本方程以及边界条件通过极坐标形式描述和表达。
本节的主要工作是介绍基本物理量,包括位移、应力和应变的极坐标形式;并且将基本方程,包括平衡微分方程、几何方程和本构关系转化为极坐标形式。
由于仍然采用应力解法,因此应力函数的极坐标表达是必要的。
应该注意的是坐标系的选取与问题求解性质无关,因此弹性力学直角坐标解的基本概念仍然适用于极坐标。
学习要点:1、极坐标下的应力分量;2、极坐标平衡微分方程;3、极坐标下的应变分量;4、几何方程的极坐标表达;5、本构方程的极坐标表达;6、极坐标系的Laplace算符;7、应力函数。
1、极坐标下的应力分量为了表明极坐标系统中的应力分量,从考察的平面物体中分割出微分单元体ABCD,其由两个相距dρ的圆柱面和互成dϕ的两个径向面构成,如图所示在极坐标系中,用σρ 表示径向正应力,用σϕ 表示环向正应力,τϕρ 和τρϕ 分别表示圆柱面和径向面的切应力,根据切应力互等定理,τϕρ =τρϕ 。
首先推导平衡微分方程的极坐标形式。
考虑到应力分量是随位置的变化,如果假设AB面上的应力分量为σρ 和τϕρ,则CD面上的应力分量为如果AD面上的应力分量为σϕ 和τρϕ ,则BC面上的应力分量为。
同时,体力分量在极坐标径向ρ 和环向 ϕ方向的分量分别为F bρϕ 和F bϕ 。
第四章 用极坐标解平面问题4.1.极坐标中的平衡微分方程工程上常常可以遇到圆形、环形、楔形或扇形类的结构物。
在这些情况下,用直角坐标描述边界条件会变得相当复杂,由于极坐标使得结构的边界与坐标线一致,因而使边界条件的描述更加简单,使问题更易于求解。
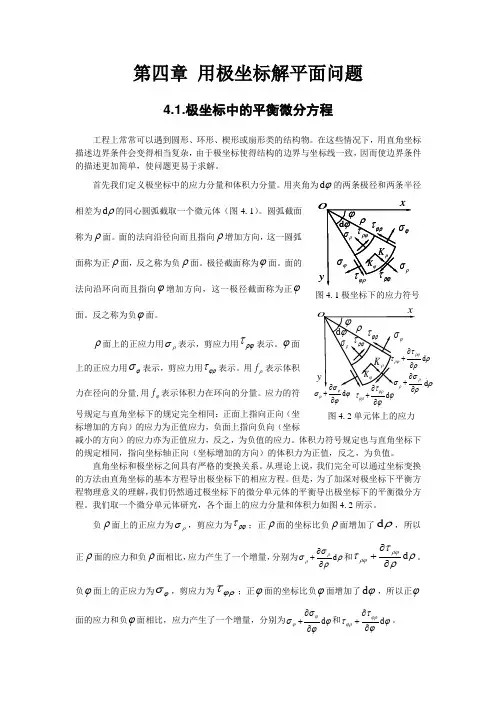
首先我们定义极坐标中的应力分量和体积力分量。
用夹角为ϕd 的两条极径和两条半径相差为ρd 的同心圆弧截取一个微元体(图4.1)。
圆弧截面称为ρ面。
面的法向沿径向而且指向ρ增加方向,这一圆弧面称为正ρ面,反之称为负ρ面。
极径截面称为ϕ面。
面的法向沿环向而且指向ϕ增加方向,这一极径截面称为正ϕ面。
反之称为负ϕ面。
ρ面上的正应力用ρσ表示,剪应力用ρϕτ表示。
ϕ面上的正应力用ϕσ表示,剪应力用ϕρτ表示。
用ρf 表示体积力在径向的分量,用ϕf 表示体积力在环向的分量。
应力的符号规定与直角坐标下的规定完全相同:正面上指向正向(坐标增加的方向)的应力为正值应力,负面上指向负向(坐标减小的方向)的应力亦为正值应力,反之,为负值的应力。
体积力符号规定也与直角坐标下的规定相同,指向坐标轴正向(坐标增加的方向)的体积力为正值,反之,为负值。
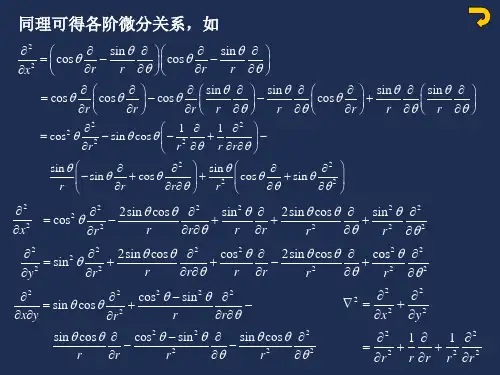
直角坐标和极坐标之间具有严格的变换关系。
从理论上说,我们完全可以通过坐标变换的方法由直角坐标的基本方程导出极坐标下的相应方程。
但是,为了加深对极坐标下平衡方程物理意义的理解,我们仍然通过极坐标下的微分单元体的平衡导出极坐标下的平衡微分方程。
我们取一个微分单元体研究,各个面上的应力分量和体积力如图4.2所示。
负ρ面上的正应力为ρσ,剪应力为ρϕτ;正ρ面的坐标比负ρ面增加了ρd ,所以正ρ面的应力和负ρ面相比,应力产生了一个增量,分别为ρρσσρρd ∂∂+和ρρττρϕρϕd ∂∂+。
负ϕ面上的正应力为ϕσ,剪应力为ϕρτ;正ϕ面的坐标比负ϕ面增加了ϕd ,所以正ϕ面的应力和负ϕ面相比,应力产生了一个增量,分别为ϕϕσσϕϕd ∂∂+和ϕϕττϕρϕρd ∂∂+。