弹性力学第七章平面问题的极坐标解
- 格式:docx
- 大小:744.99 KB
- 文档页数:37

1-1. 选择题a. 下列材料中,D属于各向同性材料。
A. 竹材;B. 纤维增强复合材料;C. 玻璃钢;D. 沥青。
b. 关于弹性力学的正确认识是A。
A. 计算力学在工程结构设计的中作用日益重要;B. 弹性力学从微分单元体入手分析弹性体,因此与材料力学不同,不需要对问题作假设;C. 任何弹性变形材料都是弹性力学的研究对象;D. 弹性力学理论像材料力学一样,可以没有困难的应用于工程结构分析。
c. 弹性力学与材料力学的主要不同之处在于B。
A. 任务;B. 研究对象;C. 研究方法;D. 基本假设。
d. 所谓“完全弹性体”是指B。
A. 材料应力应变关系满足胡克定律;B. 材料的应力应变关系与加载时间历史无关;C. 本构关系为非线性弹性关系;D. 应力应变关系满足线性弹性关系。
2-1. 选择题a. 所谓“应力状态”是指B。
A. 斜截面应力矢量与横截面应力矢量不同;B. 一点不同截面的应力随着截面方位变化而改变;C. 3个主应力作用平面相互垂直;D. 不同截面的应力不同,因此应力矢量是不可确定的。
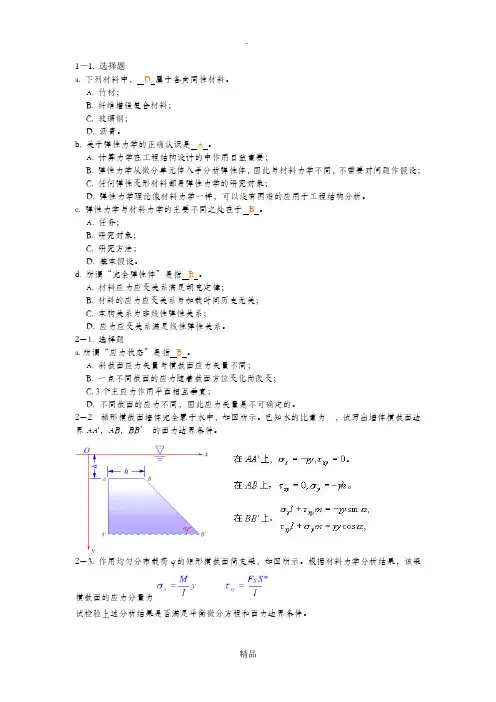
2-2. 梯形横截面墙体完全置于水中,如图所示。
已知水的比重为,试写出墙体横截面边界AA',AB,BB’的面力边界条件。
2-3. 作用均匀分布载荷q的矩形横截面简支梁,如图所示。
根据材料力学分析结果,该梁横截面的应力分量为试检验上述分析结果是否满足平衡微分方程和面力边界条件。
2-4. 单位厚度的楔形体,材料比重为,楔形体左侧作用比重为的液体,如图所示。
试写出楔形体的边界条件。
2-5. 已知球体的半径为r,材料的密度为1,球体在密度为1(1>1)的液体中漂浮,如图所示。
试写出球体的面力边界条件。
2-6. 矩形横截面悬臂梁作用线性分布载荷,如图所示。
试根据材料力学应力解答推导挤压应力y的表达式。
3-1. 选择题a. 切应力互等定理根据条件B 成立。
A. 纯剪切;B. 任意应力状态;C. 三向应力状态;D. 平面应力状态;b. 应力不变量说明D.。
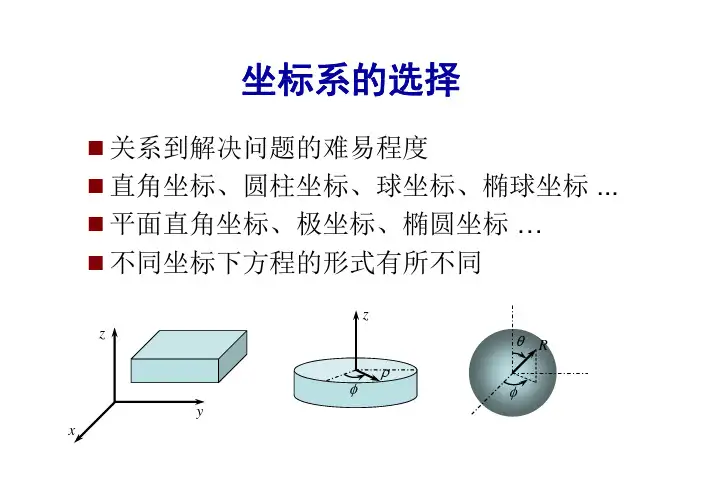
第七章平面问题的极坐标解知识点极坐标下的应力分量极坐标下的应变分量极坐标系的Laplace算符轴对称应力分量轴对称位移和应力表达式曲梁纯弯曲纯弯曲位移与平面假设带圆孔平板拉伸问题楔形体问题的应力函数楔形体应力楔形体受集中力偶作用极坐标平衡微分方程几何方程的极坐标表达应力函数轴对称位移厚壁圆筒作用均匀压力曲梁弯曲应力曲梁作用径向集中力孔口应力楔形体边界条件半无限平面作用集中力一、内容介绍在弹性力学问题的处理时,坐标系的选择从本质上讲并不影响问题的求解,但是坐标的选取直接影响边界条件的描述形式,从而关系到问题求解的难易程度。
对于圆形,楔形,扇形等工程构件,采用极坐标系统求解将比直角坐标系统要方便的多。
本章的任务就是推导极坐标表示的弹性力学平面问题基本方程,并且求解一些典型问题。
二、重点1、基本未知量和基本方程的极坐标形式;2、双调和方程的极坐标形式;3、轴对称应力与厚壁圆筒应力;4、曲梁纯弯曲、楔形体和圆孔等典型问题§7.1 平面问题极坐标解的基本方程学习思路:选取极坐标系处理弹性力学平面问题,首先必须将弹性力学的基本方程以及边界条件通过极坐标形式描述和表达。
本节的主要工作是介绍基本物理量,包括位移、应力和应变的极坐标形式;并且将基本方程,包括平衡微分方程、几何方程和本构关系转化为极坐标形式。
由于仍然采用应力解法,因此应力函数的极坐标表达是必要的。
应该注意的是坐标系的选取与问题求解性质无关,因此弹性力学直角坐标解的基本概念仍然适用于极坐标。
学习要点:1、极坐标下的应力分量;2、极坐标平衡微分方程;3、极坐标下的应变分量;4、几何方程的极坐标表达;5、本构方程的极坐标表达;6、极坐标系的Laplace算符;7、应力函数。
1、极坐标下的应力分量为了表明极坐标系统中的应力分量,从考察的平面物体中分割出微分单元体ABCD,其由两个相距dρ的圆柱面和互成dϕ的两个径向面构成,如图所示在极坐标系中,用σρ 表示径向正应力,用σϕ 表示环向正应力,τϕρ 和τρϕ 分别表示圆柱面和径向面的切应力,根据切应力互等定理,τϕρ =τρϕ 。
附录Ⅱ习题解答提示与参考答案第二章应力理论2-1 ζn=ζ1l2+ζ2m2,;式中l、m、n为斜截面外法线的方向余弦。
2-2 p=111.5A;ζn=26A;ηn=108.5A2-3 提示:平面Ax+By+C z+D=0的外法线的方向余弦为:(式中i=1,2,3或A,B,C)答案:2-4 略2-5 (a)ζ1=738.5;ζ2=600;ζ3=-338.5;ηmax=538.5;应力单位为MPa。
(b)ζ1=700;ζ2=600;ζ3=-600;ηmax=650;应力单位为MPa。
2-6 ζ1=3.732η0;ζ2=-0.268η0;α=15º。
2-7 (材料力学解) 应力单位为MPa。
(弹塑性力学解) 应力单位为MPa。
2-8 ζ1=107.3a;ζ2=44.1a;ζ3=-91.4a;ζ1主方向:(±0.314,0.900,0.305);ζ2主方向:(±0.948,±0.282,±0.146);ζ3主方向:(0.048,±0.337,0.940)。
2-9;ζ2=0;ζ3=-ζ1。
2-10、2-11 略2-12 (1)略;(2)ζ8=ζm=5.333MPa;η8=8.654MPa。
2-13 p8=59.5;ζ8=25.0a;η8=54.1a。
2-14上式中S为静矩。
材料力学解不满足平衡微分方程和边界条件。
2-15,Q为梁横截面上的剪力。
提示:利用平衡微分方程求解。
2-16 ζ1=17.083×103Pa;ζ2=4.917×103Pa;ζ3=0,∂=40º16′。
2-17 略2-18 2。
2-19 提示:将三个主方向的三组方向余弦分别两两一组代人式(2-12)证之。
2-20 。
2-21 在AA′上:ζx=-γy,ηxy=0;在AB上:ηxy=0,ζy=-γh;在BB′上:l1=cosα,l2=-sinα,l3=0;则应力分量满足关系式:2-22 。
4第四章年面问軀的級坐标解各典型例题讲解例4T 如图所示,矩形薄板在四边受纯剪切力作用,切应力大小为q 。
如果 离板边较远处有一小圆孔,试求孔边的最大和最小正应力。
例4-1图【解】(1)根据材料力学公式,求极值应力和量大正应力的方位角%其中 = 6 = 0, q = % 得最大正应力。
税“所在截面的方位角为%若在该纯剪切的矩形薄板中,沿与板边成殳方向截取矩形ABCD,则在其边界 4上便承受集度为q的拉力和压力,如图所示。
这样就把受纯剪切作用的板看作与一对边受拉,另一对边受压的板等效。
(2)取极坐标系如图。
由a =t7 cos 2(^(1--^-)(1-3-^5-),P~ P-厂4(4-18)=-^cos2^(l + 3—XP2 2% = -q sin 2卩(1 一二)(i+3 二)・得矩形薄板ABCD内的应力分量为2 2j =gcos2°(l-爲)(1-3牛)(a)=-^ cos 2^(1+ 3^-)(b)p2 2% sin 2卩(1 - $)(1+ 3 爲)(c)其中a为小孔的半径,而孔边最大与最小正应力由式(b),在p = a处得到兀=-q cos 2^(1 + 3—) = -4cos2©当(P = 0, Tl时,孔边最小正应力为(%)仙=一切,当申=±夕时,孔边最大正应力为(%)*乂= 4q。
分析:矩形板ABCD边界上各点的应力状态与板内无孔时的应力状态相同。
也可以应用叠加法,求解薄板的各种较复杂的平面应力(应变)问题。
习题全解4-1试比较极坐标和直角坐标中的平衡微分方程、几何方程和物理方程,指出哪些项是相似的,哪些项是极坐标中特有的?并说明产生这些项的原因。
【解】(1)极坐标,直角坐标中的平衡微分方程—+——+ ― / =0 dp p d (p p dr 1 Oq-^- + ---------- +—^ + f=0Pdcr dr.K—^ + —+ / =0dx dy ——+ —— + /v =0dy dx将极坐标中的平衡微分方程与直角坐标中的平衡微分方程相比较,第一式中, 前两项与直角坐标相似;而严项是由于正P 面上的面积大于负P 面上的面积而产生 的,-严是由于正负(P 而上的正应力%在通过微分体中心的P 方向有投影而引起的。
第七章 平面问题的极坐标解知识点极坐标下的应力分量 极坐标下的应变分量 极坐标系的 Laplace 算符 轴对称应力分量 轴对称位移和应力表达式 曲梁纯弯曲 纯弯曲位移与平面假设 带圆孔平板拉伸问题 楔形体问题的应力函数 楔形体应力 楔形体受集中力偶作用、内容介绍在弹性力学问题的处理时,坐标系的选择从本质上讲并不影响问题的求解, 但是坐标的选取直接影响边界条件的描述形式,从而关系到问题求解的难易程 度。
对于圆形,楔形,扇形等工程构件,采用极坐标系统求解将比直角坐标系统 要方便的多。
本章的任务就是推导极坐标表示的弹性力学平面问题基本方程, 且求解一些典型问题。
极坐标平衡微分方程 几何方程的极坐标表达 应力函数 轴对称位移 厚壁圆筒作用均匀压力 曲梁弯曲应力 曲梁作用径向集中力 孔口应力 楔形体边界条件 半无限平面作用集中力二、重点1、基本未知量和基本方程的极坐标形式;2、双调和方程的极坐标形式;3、轴对称应力与厚壁圆筒应力;4、曲梁纯弯曲、楔形体和圆孔等典型问题§7.1平面问题极坐标解的基本方程学习思路:选取极坐标系处理弹性力学平面问题,首先必须将弹性力学的基本方程以及边界条件通过极坐标形式描述和表达。
本节的主要工作是介绍基本物理量,包括位移、应力和应变的极坐标形式;并且将基本方程,包括平衡微分方程、几何方程和本构关系转化为极坐标形式。
由于仍然采用应力解法,因此应力函数的极坐标表达是必要的。
应该注意的是坐标系的选取与问题求解性质无关,因此弹性力学直角坐标解的基本概念仍然适用于极坐标。
学习要点:1、极坐标下的应力分量;2、极坐标平衡微分方程;3、极坐标下的应变分量;4、几何方程的极坐标表达;5、本构方程的极坐标表达;6极坐标系的LaPIaCe算符;7、应力函数。
1、极坐标下的应力分量为了表明极坐标系统中的应力分量,从考察的平面物体中分割出微分单元体ABCD ,其由两个相距茁的圆柱面和互成d「的两个径向面构成,如图所示在极坐标系中,用二表示径向正应力,用二表示环向正应力,「,和•二:分别表示圆柱面和径向面的切应力,根据切应力互等定理,.J=.二:。
首先推导平衡微分方程的极坐标形式。
考虑到应力分量是随位置的变化,如果假设AB面上的应力分量为^和二A 则CD面上的应力分量为如果AD面上的应力分量为"和甲,则BC面上的应力分量为同时,体力分量在极坐标径向「和环向':方向的分量分别为Fb;':〉和Fb ':o2、极坐标平衡微分方程设单元体的厚度为1,如图所示考察其平衡首先讨论径向的平衡,注意到Zr]" I ,可以得到∂a^.∂σ.A(D(O^ + ——AP)(P + dp)dφ - σf^pAφ - (σφ + ——Aφ)dp--OP oφZB 切字+ & J 号;⅜)dp-r^dχ? + ^ pΛpΛP = O简化上式,并且略去三阶微量,则竺Δ +J⅛宀P =O∂p P ∂φP Q同理,考虑微分单元体切向平衡,可得∂o^∂τ+-g^-^φ)dp - + (r^ + -^-A^P ^A P)A p p P A(P^J+⅛ A^A P^+T^A P竽讥P d p呦=0简化上式,可以得到极坐标系下的平衡微分方程,即3、极坐标下的应变分量以下推导极坐标系统的几何方程。
在极坐标系中,位移分量为u::, U「,分别为径向位移和环向位移。
极坐标对应的应变分量为:径向线应变寫,即径向微分线段的正应变;环向线应变;「为环向微分线段的正应变;切应变为径向和环向微分线段之间的直角改变量。
首先讨论线应变与位移分量的关系,分别考虑径向位移环向位移U :,U所pΛφ为厂 .;环向微分线段AB「d「的相对伸长为—I;OP pdφP 如果只有环向位移u「时,径向微分线段线没有变形,如图所示环向微分线段的相对伸长为将上述结果相加,可以得到正应变分量4、几何方程的极坐标表达下面考察切应变与位移之间的关系。
设微分单元体因此切应变为W= + (∣,-:)上式中表示环向微分线段AB向'方向转过的角度,即, I 表示径向微分线段AD向「方向转过的角度,因此二—■A点的环向位移除以该点的径向坐标「,即二OP1 j7=-;而将上述结果回代,则一点的切应变为4 一… —O综上所述,可以得到极坐标系的几何方程为ε λ -——角应等于5、本构方程的极坐标表达由于讨论的物体是各向同性材料的,因此极坐标系的本构方程与直角坐标的表达形式是相同的,只要将其中的坐标X和y换成T和「就可以了。
对于平面应力问题,有6、极坐标系的LaPlaCe算符平面问题以应力分量形式表达的变形协调方程在直角坐标系中为JMl・:i D。
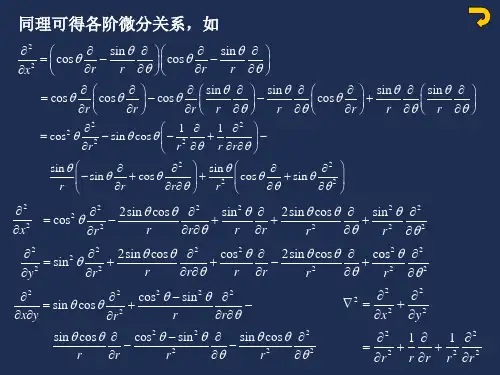
由于匚x+;「y= ■、二片匚「为应力不变量,因此对于极坐标问题,仅需要将直角坐标中的LaPIaCe算符」—∣ —转换为极坐标的形式。
因为,X=TCOS,y=: Si,即匚:常汕LTr 。
将T 和和分别对X和y求偏导数,可得∂φ 1 1 I-L- 二一CoS ©眇x1 +∕PX2根据上述关系式,可得以下运算符号3 dp ∂ ∂φ ∂ 3 1 . 3——二---------------- + --------------- = cos®——-—Sin (P ——SX ‰ dp‰∂φdp P ∂φ∂dp ∂∂φ∂* ∂ 1 3——=一——+ --------------------- =Sin^——+ -COS(^ ——∂y5y dp ∂y∂φdp P ∂φE i对于平面应变问题,只要将上述公式中的弹性常数E,分别换为1 - v2IZI-V就可以y 丄“吓W√x77∕ P∂2 . 3 1 . 3 , z δ 1 . 2 . TT = (cos⅛p - - - sin ⅞p -)(cos^- - -Sln φ~) VX VP P oφ opP oφ _ H ∂2 _ 2sin ^cos 52 + sin 2 φ 9 + 2sin ⅛pcos⅛p 9 + sin 2 32CoS卩 3∕? P ∂p∂φ P dp P l ∂φ P A ∂φ 沪 f ・ 9 +1 9v- 9 + 1 9.TT = (srn??—÷-cos⅛p~)(sn⅛p -+-cosp —) Oy dp P ∂φ dp P ∂φ . S 2 cos 2 ^-Sm 2 φ 32 Sin^CoSGJ =Sin co —- + ------------ - ------ - ------- + ----- ---- - P 讷卩COS J 2 φ S Sifl ^COS^ 3ip 2 ∂φ p 2 Sφ2将以上两式相加,简化可以得到极坐标系的—兰少=护 _____________________________________ ____________ ∂x 2 + ∂f 2 ∂f^ ^PdP^P 2 ∂φ2 另外,注意到应力不变量 ;- ;、∙-J - - -C ,因此在极坐标系下,平面问 题的由应力表达的变形协调方程变换为 1 & 1 淨 W X n + —〒+ K 丿(勺 + Cr ffJ ) = 0 P ∂p P ∂φLaPlaCe 算符。
1 ∂ 1 ∂2 + --------- + ---------∂2 V a (^÷^) =7、应力函数 为在给定的边界条件下求解双调和方程。
在应力函数解出后,可以应用应力分量表达式+ 1 白仍二 _ 9 1 ⅜fP p 2 bφ dp P ∂φ求解应力,然后通过物理方程务=⅛(σp -∣∕<τp )求解应变分量和位移分量 §7.2轴对称问题的应力和相应的位移 学习思路:如果弹性体的结构几何形状、材料性质和边界条件等均对称于某一个轴时, 称为轴对称结构。
轴对称结构的应力分量与 '无关,称为轴对称应力。
如果位移 也与‘无关,和几何方程2(1+ v)E~~如果弹性体体力为零,则可以采用应力函数解法求解。
不难证明下列应力表这里T (「,)是极坐标形式的应力函数,假设其具有连续到四阶的偏导数。
将 上述应力分量表达式代入变形协调方程,可得显然这是极坐标形式的双调和方程。
总而言之,用极坐标解弹性力学的平面问题,与直角坐标求解一样,都归结1护佻称为轴对称位移问题。
本节首先根据应力分量与:无关的条件,推导轴对称应力表达式。
这个公式有3个待定系数,仅仅根据轴对称应力问题的边界条件是不能确定的。
因此讨论轴对称位移,根据胡克定理的前两式,得到环向位移和径向位移公式,然后代入胡克定理第三式,确定待定函数。
轴对称问题的实质是一维问题,因此对于轴对称问题,均可以得到相应的解应该注意的问题是如何确定轴对称问题学习要点:1轴对称应力分量;2、轴对称位移;3、轴对称位移函数推导;4、轴对称位移和应力表达式。
1、轴对称应力分量考察弹性体的应力与「无关的特殊情况,如图所示。
即应力函数仅为坐标T 的函数。
这样,变形协调方程1 3 1 护、+------- + ---------- )P dp P I∂φ2即双调和方程成为常微分方程(^L÷lA x⅛÷ 丄=OΛp1 P dp Ap1 P如将上式展开并在等号两边乘以可得4 5 . ςι M 切 2 <*>f . ⅜f -πP5 矿 FPr对于这类方程,只要引入变换'=e t,则方程可以变换为常系数的这是欧拉方程,微分方程,有其通解为φi (t) = At +B⅛e + C⅛2' + D注意到t = In「,则方程的通解为φf (P) = Akip+ SP J Inp + CP + D将上式代入应力表达式G=I⅛L+丄血H Sφ29 V fσ -———P皤_ _ 1 3冷£ 1 3% _∂5一~p∂p∂φ1√^97^则轴对称应力分量为σ= —4 + 5(1 +2InP) + IC P P=4⅛ = ^~τ + δ<3 + 21n^) + 2c 切P^=θ上述公式表达的应力分量是关于坐标原点对称分布的,因此称为轴对称应力。
2、轴对称位移现在考察与轴对称应力相对应的变形和位移。
对于平面应力问题,将应力分量代入物理方程弓=£(屯-%二£(弓-心r,p2⅛ + v)t pφ/沪PG E可得应变分量1 A= —[(1 + V)—+ (1-3√)B + 2(1 - V)BIiI P+ 2(1 - P)C] E P1 Δ% - —[-(1 + 卩)二 + (3-y)B + 2(1-y)BInp+ 2(L-r)C] E P嘉=°根据上述公式可见,应变分量也是轴对称的。
将上式代入几何方程E _ ------ P dpF 二土卡丄些 * P p^φ -1 ⅜ + 9⅛ ,¾ 牌 P ∂φ dp P+ ——;—=—[一Q + V)—- + (3 -v)S + 2(1 -1/)BkIP +2(1- V)C] P p ∂φ E P IdU λ ∂u 皿 Il Ji ±_ +-丄二 O P ∂φ dp P对上述公式的第一式∂u.1 r A ,,二—[(1 +IZ)— ÷ Q -3v)β+ 2(1 -v)51n P + 2(1 - V)C] 3p E P积分,可得1A©二曰-Q 2) — + 2(L L v)Bp(∖n /7-1) + (1-3v)Bp + 2(1 - v)Cp ∖ + f(φ) LP其中f (为,的任意函数。