计算摄影学基础
- 格式:doc
- 大小:6.71 KB
- 文档页数:3
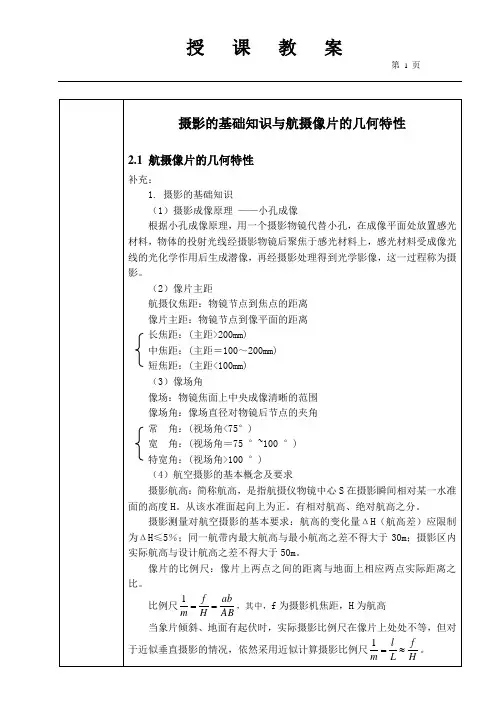
摄影测量学第一章 绪论1、摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体的几何、属性等可靠信息的工艺、科学与技术。
2、摄影测量学的三个发展阶段:模拟摄影测量、解析摄影测量、数字摄影测量4、摄影测量存在哪些问题第二章 单幅影像解析基础1、像主点:摄影机主光轴(摄影方向)与像平面的交点,称为像片主点。
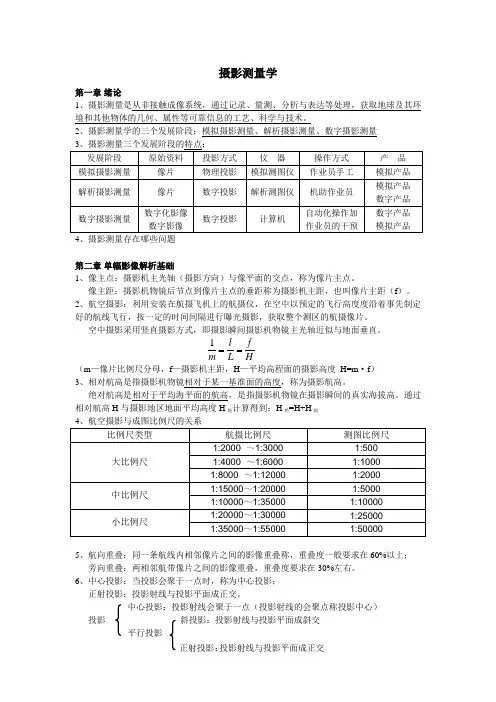
像主距:摄影机物镜后节点到像片主点的垂距称为摄影机主距,也叫像片主距(f )。
2、航空摄影:利用安装在航摄飞机上的航摄仪,在空中以预定的飞行高度度沿着事先制定好的航线飞行,按一定的时间间隔进行曝光摄影,获取整个测区的航摄像片。
空中摄影采用竖直摄影方式,即摄影瞬间摄影机物镜主光轴近似与地面垂直。
Hf L l m ==1 (m —像片比例尺分母,f —摄影机主距,H —平均高程面的摄影高度 H=m ·f ) 3、相对航高是指摄影机物镜相对于某一基准面的高度,称为摄影航高。
绝对航高是相对于平均海平面的航高,是指摄影机物镜在摄影瞬间的真实海拔高。
通过相对航高H 与摄影地区地面平均高度H 地计算得到:H 绝=H+H 地5、航向重叠:同一条航线内相邻像片之间的影像重叠称,重叠度一般要求在60%以上; 旁向重叠:两相邻航带像片之间的影像重叠,重叠度要求在30%左右。
6、中心投影:当投影会聚于一点时,称为中心投影; 正射投影:投影射线与投影平面成正交。
中心投影:投影射线会聚于一点(投影射线的会聚点称投影中心) 投影 斜投影:投影射线与投影平面成斜交 平行投影正射投影:投影射线与投影平面成正交7、透视变换中的重要的点线面:① 由投影中心作像片平面的垂线,交像面于o ,称为像主点;像主点在地面上的对应点以O 表示,称为地主点。
② 由摄影中心作铅垂线交像片平面于点n ,称为像底点;此铅垂线交地面于点N ,称为地底点。
③ 过铅垂线SnN 和摄影方向SoO 的铅垂面称为主垂面(W ),主垂面即垂直于像平面P ,又垂直于地平面E ,也垂直于两平面的交线透视轴TT 。
一、名词解释像片比例尺:把摄影像片当作水平像片,地面取平均高程,这时像片上的线段l与地面上相应线段的水平距离L的比值.绝对航高:相对于平均海平面的行高,是指摄影物镜在摄影瞬间的真实海拔.相对航高:摄影机物镜相对于某一基准面的高度.像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞机姿态出现较大倾斜或地面有起伏时,会导致地面点在航摄像片上的构象相对于理想情况下的构象所产生的位置差异.摄影基线:航线方向相邻两个摄影站点间的空间距离.航向重叠:同一航线内相邻像片之间的影像重叠.旁向重叠:两相邻行带像片之间的影像重叠.像片倾角:摄影机的主光轴偏离铅垂线的夹角.像片的方位元素:确定摄影瞬间摄影物镜与像片在地面设定的空间坐标系中的位置与姿态的参数.像片的内方位元素:表示摄影中心与像片之间相互位置的参数.像片的外方位元素:标示摄影中心和像片在地面坐标系中的位置和姿态参数.相对定向元素:确定一个立体像对两像片的相对位置的元素.绝对定向元素:描述立体相对在摄影瞬间的绝对位置和姿态的参数.单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影响上对应三个像点的影像坐标,根据共线方程,反求该像片的外方位元素.空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标.双像解析摄影测量:按照立体像对与被摄物体的几何关系,以数学计算的方式,通过计算机解求被摄物体的三维空间坐标.空中三角测量:利用计算的方法,根据航摄像片上所测的像点坐标以及少量的地面控制点求出地面加密点的物方空间坐标.POS:基于GPS和惯性测量装置IMU的直接测定影像外方位元素的现代航空摄影导航系统,可以获取移动物体的空间位置和三轴姿态信息.影像的灰度:光学密度,D=lgO.数字影像的重采样:当欲知不位于矩阵点上的原始函数g(x,y)的数值时就需进行内插,此时称为重采样.影像匹配:利用互相关函数,评价两块影响的相似性以确定同名点.核线相关:沿核线寻找同名像点.像片纠正:对原始的航摄像片或数字影像进行处理,获取相当于水平像片的影响或数字正射影像.数字正射影像图:(DigitalOrthophotoMap)DOM ,是以航摄像片或遥感影像(单色/彩色)为基础,经扫描处理并经逐像元进行辐射改正、微分纠正和镶嵌,按地形图范围裁剪成的影像数据,并将地形要素的信息以符号、线画、注记、公里格网、图廓(内/外)整饰等形式填加到该影像平面上,形成以栅格数据形式存储的影像数据库.立体像对:摄影测量中,用摄影机在两摄站点对同一景物摄得的有一定重叠度的两张像片.立体正射影像对:为了从立体观测中获得只管立体感,为正射影像制作出一副立体匹配片,正射影像和相应的立体匹配片共同称为立体正射影像对.1、摄影测量的主要特点是什么?(1)无需解除物体本身获得被摄物体信息. (2)由二维影响重建三维目标. (3)面采集数据形式.(4)同时提取物体的几何与物理特性.2、航空摄影机也被称为量测摄影机,它有什么特征?(1)量测摄影机的像距是一个固定的已知值. (2)摄影机的像面框架上有框标标志. (3)量测摄影机的内方位元素是已知的.3、摄影测量常用的坐标系统有哪些?(1)像平面坐标系O-XY (2)像空间坐标系O-XYZ (3)像空间辅助坐标系S-XYZ (4)摄影测量坐标系A-XpYpZp (5)物方空间坐标系O-XtYtZt4、航摄像片与地形图有什么区别?(1)投影方式不同 (2)航片存在两项误差 (3)比例尺的不用(4)标示方法的不同 (5)表示内容的不同 (6)几何上的不同5、请写出共线方程式,并回答:若已知像片的内外方位元素及地面点的三维坐标,可以求相应的像点坐标吗?若已知像片的内外方位元素及像点坐标时,可以求相应的三维的物点坐标吗?可以.只知左片,不可以;引入DEM循环迭代求解可以;左右两片均已知,可以.−0=−fa1 XA−XS +b1 YA−YS +c1 ZA−ZSa3 XA−XS +b3 YA−YS +c3 ZA−ZS−0=−fa2 XA−XS +b2 YA−YS +c2 ZA−ZSa3 XA−XS +b3 YA−YS +c3 ZA−ZS6、共线条件方程有哪些应用?(1)单像空间后方交会和多像空间前方交会 (2)解析空中三角测量光束法平差中的基本数学模型 (3)构成数字投影的基础 (4)计算模拟影像数据 (5)利用数字高程模型与共线方程制作正射影像 (6)利用DEM与共线方程进行单幅影像测图 (7)求像底点坐标7、人造立体视觉必须符合哪几个自然界立体观察的条件?(1)由两个不用设站点摄取同一景物的立体像对 (2)一只眼睛只能观查像对中的一张照片,分像条件 (3)两眼各自观测同一景物的左右影像店的连线应与眼基线近似平行 (4)像片的距离应与双眼的交会角相适应 (5)两片比例尺相近8、请说明利用立体像对重建立体模型的一般过程.恢复像对内方位元素:内定向;恢复像对内方位元素:相对定向(恢复两张像片相对位置);绝对定向(确定模型的大小与方位)9、连续像对和独立像对的坐标系统和定向元素有何不同?连续像对:以左片的像空间坐标系为像对的像空间辅助坐标系.定向元素:BY,BZ,,φ,ω,κ独立像对:以作摄影中心为原点、左主核面为XZ平面、摄影基线为X轴的右手空间直角坐标系.定向元素:φ1,κ1,φ2,ω2,κ2.10、请对双像解析摄影测量的三种解法进行比较.方法严密性控制点要求使用场合后交-前交法点位精确度取决于外方位元素精度没有利用多余条件 3个平高点已知像片外方位元素相对定向-绝对定向点位精度取决于相对定向绝对定向精度2个平高点+ 1个高程点航带法加密一步定向法理论最严密精度最高2个平高点+ 1个高程点光束法加密11、为了求解相对定向元素,是否需要地面控制点?为什么?不需要.相对定向只是确定像对内在的几何关系,恢复两张像片摄影时的相对位置和姿态,只需测量至少5对同名像点,而不需要地面控制点.12、像点坐标有哪些系统误差?由摄影材料变形,摄影物镜畸变,大气折光,地球曲率等引起的系统误差.13、简述自动空中三角测量的基本原理?利用模式识别和多影像匹配等方法代替人工在影像上自动选点和转点,同时自动获取像点坐标,提供给区域网平差程序解算,以确定加密点在选定坐标系中的空间位置和影像的定向参数.14、简述数字微分纠正的原理.通过对点元素、线元素、面元素的纠正,实现两个二维图像之间的几何变换.15、分析对比常用的三种影像重采样方法.(1)最邻近像元法最简单,计算速度快且能不破坏原始影像的灰度信息。
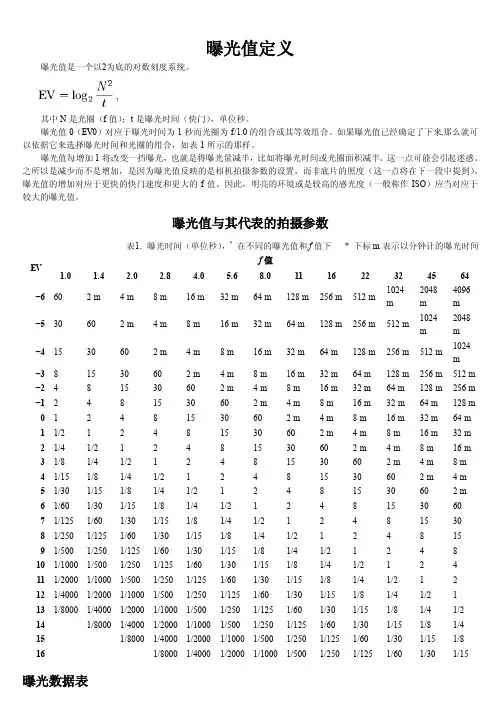
曝光值定义曝光值是一个以2为底的对数刻度系统。
其中N是光圈(f值);t是曝光时间(快门),单位秒。
曝光值0(EV0)对应于曝光时间为1秒而光圈为f/1.0的组合或其等效组合。
如果曝光值已经确定了下来,那么就可以依据它来选择曝光时间和光圈的组合,如表1所示的那样。
曝光值每增加1将改变一挡曝光,也就是将曝光量减半,比如将曝光时间或光圈面积减半。
这一点可能会引起迷惑。
之所以是减少而不是增加,是因为曝光值反映的是相机拍摄参数的设置,而非底片的照度(这一点将在下一段中提到)。
曝光值的增加对应于更快的快门速度和更大的f值。
因此,明亮的环境或是较高的感光度(一般称作ISO)应当对应于较大的曝光值。
曝光值与其代表的拍摄参数表1. 曝光时间(单位秒),*在不同的曝光值和f值下* 下标m表示以分钟计的曝光时间EVf值1.0 1.42.0 2.8 4.0 5.6 8.0 11 16 22 32 45 64−6 60 2 m 4 m 8 m 16 m 32 m 64 m 128 m 256 m 512 m 1024m2048m4096m−5 30 60 2 m 4 m 8 m 16 m 32 m 64 m 128 m 256 m 512 m 1024m2048m−4 15 30 60 2 m 4 m 8 m 16 m 32 m 64 m 128 m 256 m 512 m 1024 m−3 8 15 30 60 2 m 4 m 8 m 16 m 32 m 64 m 128 m 256 m 512 m −2 4 8 15 30 60 2 m 4 m 8 m 16 m 32 m 64 m 128 m 256 m −1 2 4 8 15 30 60 2 m 4 m 8 m 16 m 32 m 64 m 128 m0 1 2 4 8 15 30 60 2 m 4 m 8 m 16 m 32 m 64 m1 1/2 1 2 4 8 15 30 60 2 m 4 m 8 m 16 m 32 m2 1/4 1/2 1 2 4 8 15 30 60 2 m 4 m 8 m 16 m3 1/8 1/4 1/2 1 2 4 8 15 30 60 2 m 4 m 8 m4 1/15 1/8 1/4 1/2 1 2 4 8 15 30 60 2 m 4 m5 1/30 1/15 1/8 1/4 1/2 1 2 4 8 15 30 60 2 m6 1/60 1/30 1/15 1/8 1/4 1/2 1 2 4 8 15 30 607 1/125 1/60 1/30 1/15 1/8 1/4 1/2 1 2 4 8 15 308 1/250 1/125 1/60 1/30 1/15 1/8 1/4 1/2 1 2 4 8 159 1/500 1/250 1/125 1/60 1/30 1/15 1/8 1/4 1/2 1 2 4 810 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 1/8 1/4 1/2 1 2 411 1/2000 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 1/8 1/4 1/2 1 212 1/4000 1/2000 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 1/8 1/4 1/2 113 1/8000 1/4000 1/2000 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 1/8 1/4 1/214 1/8000 1/4000 1/2000 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 1/8 1/415 1/8000 1/4000 1/2000 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 1/816 1/8000 1/4000 1/2000 1/1000 1/500 1/250 1/125 1/60 1/30 1/15 曝光数据表有时候可能没有测光表可供使用,或是场景的光线情况十分特殊因而难以测量。
摄影比例尺越大,像片地面分辨率越高,有利于影像的判读和提高成图的精度。
比例尺类别 航 摄 比 例 尺成图比例尺 大比例尺 1:2000-1:30001:500 1:4000-1:60001:1000 1:8000-1:120001:5000 中比例尺 1:15000-1:2000(像幅23cm ×23cm)1:10000-1:250001:25000-1:35000(像幅23cm ×23cm)1:10000 小比例尺 1:20000-1:300001:25000 1:35000-1:55000 1:50000摄影比例尺小于测图比例尺,一般为测图比例尺的3~5倍。
航空摄影主要是为地形测绘、资源及环境调查提供基本资料,需对测区进行面积覆盖,为此进行的航空摄影称面积航空摄影。
为保证连续覆盖和像对立体观察,相邻像片间需要有部分影像重叠。
航向重叠:沿航线方向影像重叠称航向重叠,重叠率要求达到60%-65%,不小于53%,不大于75%。
%100%⨯=xx x L p p 具有这种重叠关系的两张相邻像片称立体像对。
旁向重叠:两条相邻航线间的影像重叠称旁向重叠,重叠率通常为20%—30%。
地形起伏强烈,重叠率相应要加大。
最小不得小于15% ,最大不大于50%。
%100%⨯=yy y L p p 重叠度小于最小限定值时,称为航摄漏洞,不能用正常航测方法作业,必须补飞补摄;重叠度过大时,会造成浪费,不利于测图。
主光轴:过航摄机镜头后节点垂直于底片面的一条光线称为主光轴。
像片倾斜角:主光轴与铅垂线之间的夹角称为像片倾斜角,像片倾斜角应小于3°。
垂直摄影:像片倾斜角小于3°的航空摄影称为竖直航空摄影或近似垂直摄影,取得的像片称为近似水平像片。
目前航空摄影主要是这种类型。
倾斜摄影:像片倾斜角大于3°的航空摄影称为倾斜航空摄影,所取得的像片称为倾斜像片,多用于军事目的,可在我方阵地一侧向敌方阵地进行拍摄。
深入理解计算摄影的技术原理计算摄影是一种结合计算机科学和摄影技术的领域,它利用计算机的强大处理能力和图像算法的优势,提供了许多在传统摄影中难以实现的功能和效果。
本文将深入探讨计算摄影的技术原理,从图像处理、计算机视觉以及计算摄影应用三个方面进行介绍。
一、图像处理技术在计算摄影中的应用1. 图像滤波图像滤波是计算摄影中常用的图像处理技术之一。
通过对图像进行滤波操作,可以改变图像的频率和强度分布,实现模糊、锐化、降噪等效果。
在计算摄影中,使用滤波技术可以模拟不同光圈、快门速度下的效果,使图像达到更好的观感。
2. 色彩映射色彩映射是计算摄影中通过改变图像的颜色分布来改变图像效果的一种技术。
通过对图像的色调、亮度、对比度等因素进行调整,可以达到增加鲜艳度、调整色彩平衡、模拟不同的光线条件等效果。
色彩映射技术可以使计算摄影的图像呈现出更加生动、丰富的效果。
3. 图像合成图像合成是计算摄影中的一项重要技术,它可以将多张图像进行融合,生成具有新的效果和内容的图像。
在计算摄影中,图像合成可以用于实现HDR影像合成、全景图像拼接、多视角合成等功能。
通过图像合成技术,可以将多个视角的图像融合为一张更具艺术感和视觉冲击力的图像。
二、计算机视觉在计算摄影中的应用1. 特征提取与匹配特征提取与匹配是计算机视觉领域中的重要技术,也是计算摄影的基础之一。
通过提取图像中的关键点和特征描述子,并对不同图像进行匹配,可以实现图像对齐、物体识别、运动估计等功能。
在计算摄影中,特征提取与匹配技术可以用于实现图像融合、景深合成、人像分割等效果。
2. 三维重建与虚拟现实三维重建与虚拟现实是计算机视觉和计算摄影的前沿领域之一。
通过对多个角度的图像进行配准和重建,可以实现三维场景的建模和可视化。
在计算摄影中,三维重建与虚拟现实技术可以用于实现虚拟摄影、VR/AR应用、景深效果模拟等功能。
三、计算摄影的应用领域和前景1. 文化遗产保护与重建计算摄影在文化遗产保护与重建领域具有广阔的应用前景。
计算摄影学课程代码: 课程名称:计算摄影学学分:4 周学时: 3.0-2.0面向对象:本科生预修课程要求:微积分或数学分析、线性代数、概率论与数理统计、数据结构基础、C语言 一、课程介绍(100-150字)(一)中文简介:计算摄影学是一个新兴的研究领域,旨在通过可计算的图像获取、处理和操纵技术,将软硬件有机结合起来克服传统数码相机的局限性,实现对图像能力的增强或扩展。
在本课程中,我们将学习如何操纵和结合图片、视频来产生新的更好的图片、全景图、视频、3D模型、动画等等。
(二)英文简介Computational photography is an emerging field that aims to combine software and hardware with computational image capture, processing and manipulation techniques to overcome the limitations of conventional digital cameras, so that the capabilities of digital photos can be to enhanced or extended. In this course, we will study ways of manipulating and combining photographs and videos to produce new and better pictures, panoramas, 3D models, animations, etc.二、主要内容及学时分配1.计算摄影学概览 3学时主要内容:计算摄影旨在通过可计算的图像获取、处理和操纵技术,将软硬件有机结合起来克服传统数码相机的局限性,实现对图像能力的增强或扩展。
本次课主要介绍传统摄像技术的局限性,计算摄影学涵盖的主题、概念和基本原理,其研究现状和发展趋势,并快速浏览一下后面的课程内容,介绍学习本课程所需要准备的东西,课后编程题和课程项目的要求细节,考试的方式及要求等。
第一章绪论1、传统摄影测量学:利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科。
2、中国大百科全书-----研究利用摄影或遥感手段获取被测物体的信息(影象或数字式),进行分析和处理,以确定被测物体的形状、大小和位置,并判断其性质的一门学科。
3、国际ISPRS ------摄影测量与遥感乃是对非接触传感器系统获得的影象及其数字表达进行记录、量测和解译,从而获得自然物体和环境的可靠信息的一门工艺、科学和技术。
4、摄影测量:本书概念:P15、摄影测量与数字摄影测量的关系摄影测量学-----是影象信息获取、处理、分析和表达的信息科学。
内容:获取被研究物体的影像,单张和多张像片处理的理论、方法、设备和技术,以及将所测得的成果如何用图形、图像或数字表示。
摄影测量的特点⏹1、在影像上量测,无需接触物体本身,因此很少受自然地理等条件的限制。
⏹2、影象是客观事物的真实反映,信息丰富,可选择需要的物体影象进行量测、处理、研究,从影象上获得最新最全面的几何或物理信息。
⏹3、摄影测量大部分工作在内业进行,有利于自动化、数字化、智能化,工作效率高。
摄影测量分类按距离远近按用途按处理手段航天摄影测量地形摄影测量模拟摄影测量航空摄影测量非地形摄影测量解析摄影测量近景摄影测量数字摄影测量显微摄影测量摄影测量:任务▪ 1.地形测量领域各种比例尺的地形图、专题图、特种地图▪正射影像地图、景观图,建立各种数据库,提供地理信息系统和土地信息系统所需要的基础数据▪ 2.非地形测量领域生物医学,公安侦破,古文物、古建筑,建筑物变形监测摄影测量学的三个发展阶段⏹模拟摄影测量阶段(1851-1970)⏹解析摄影测量阶段(1950-1980)⏹数字摄影测量阶段(1970-现在)1. 摄影测量、遥感与地理信息系统的结合⏹由于数字测图、全数字化摄影测量和遥感图像处理技术的发展需要有一个数据库或空间信息系统来存贮、管理数据,并与其它非图形的专题信息相结合,进行分析、决策。
摄影比例尺:摄影比例尺越大,像片地面的分辨率越高,有利于影像的解译与提高成图精度摄影航高:相对航高:绝对航高:摄影测量生产对摄影资料的基本要求:影像的色调、像片倾角(摄影机主光轴与铅垂线的夹角,α= 0 时为最理想的情形)像片重叠:航向重叠:同一航线内相邻像片应有一定的影像重叠;旁向重叠:相邻航线也应有一定的重叠;航线弯曲:一条航线内各张像片的像主点连线不在一条直线上;像片旋角:相邻两像片的主点的连线与像片沿航线方向的两框标连线之间的夹角;像片旋角过大会减小立体相对的有效观察范围中心投影:所有投射线或其延长线都通过一个固定点的投影阴位:投影中心位于物和像之间。
(距摄影中心f )阳位:投影中心位于物和像同侧。
(距摄影中心f )像方坐标系:像平面坐标系(像主点o 为原点)像空间坐标系(x 、y 、-f)像空间辅助坐标系S-uvw物方坐标系:地面测量坐标系T-XYZ (高斯平面坐标+高程)左手系地面摄影测量坐标系D-XYZ内方位元素: x 0,y 0,f 作用: 1、像点的框标坐标系向像空间坐标系的改化;2、确定摄影光束的形状;外方位元素:确定摄影光束在摄影瞬间的空间位置和姿态的参数线元素(X S ,Y S ,Z S )角元素(航向倾角ϕ、 旁向倾角ω、 像片旋角κ)共线条件方程(摄影中心、像点、地面点)像点位移:因像片倾斜引起的像点位移 同摄站同主距的倾斜像片和水平像片沿等比线重合时,地面点在倾斜像片上的像点与相应水平像片上像点之间的直线移位像点位于等比线上,无像片倾斜引起的像点位移等比线上部的像点的像片倾斜误差方向向着等角点等比线下部的像点的像片倾斜误差方向背向等角点(1) 当 时, ,即等比线上的点不会因像片倾斜产生像点位移(2)当 ,像点位移朝向等角点(一、二像限)(3)当 ,像点位移背向等角点(三、四像限)(4)当 时,主纵线上点的位移最大像片纠正:因像片倾斜产生的影像变形改正因地面起伏引起的像点位移(投影差):当地面有起伏时,高于或低于所选定的基准面的地面点的像点,与该地面点在基准面上的垂直投影点的像点之间的直线移位地形起伏像点位移的符号与该点的高差符号相同,像片上任何一点都存在像点位移物镜畸变、大气折光、地球曲率及底片变形等一些因素均会导致像点位移航摄像片:中心投影,平均比例尺,影像有变形,方位发生变化地形图:正射投影,比例尺固定,图形形状与实地完全相似,方位保持不变在表示方法上:地形图是按成图比例尺,用各种规定的符号、注记和等高线表示地物地貌;航片则是通过影像的大小、形状和色调表示。
摄影测量基本公式1) 空间直角坐标变换用像片上的点坐标解求相应地面点坐标时,在建立起各种空间直角坐标系的基础上,需要在两两不同的坐标系中进行坐标变换,由高等数学可知,空间直角坐标的变换是正交变换,一个坐标系按三个角元素顺次旋转即可变换为另一个同原点的坐标系。
设像点a 在像空间坐标系中的坐标为(x ,y ,-f ),而在像空间辅助坐标系中的坐标为(X ,Y ,Z ),两者之间的正交变换关系可以用下式表示:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡f y x c c c b b b a a a f y x R Z Y X 321321321 R 是一个3⨯3的正交矩阵,由九个方向余弦组成。
1) 2) 像点与相应地面点之间的坐标关系如图(8-7)O-XYZ 为选定的地面右手坐标系,地面点A 与投影中心S 在此坐标系中的坐标分别为X, Y, Z 和X S , Y S , Z S ;A 在像片的构像a ,在像空间坐标系与像空间辅助坐标系中的坐标分别为(x, y, -f )和(X ’, Y ’, Z ’),其中像空间辅助坐标系s-xyz 与地面坐标系O-XYZ 的相应坐标轴分别平行,由于s, a, A 三点位于一直线上,由图中各相似三角形关系可得λ1'''=-=-=-s s s Z Z Z Y Y Y X X X以矩阵表示为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---'''Z Y X Z Z Y Y X X s s s λ 有由~式可得像点的像空间坐标系与像空间辅助坐标系的关系为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---f y x c c c b b ba a a Z Z Y Y X X s s s 321321321λ 上式的逆变换为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--s s s s s s Z Z Y Y X X c c c b b ba a a Z Z Y Y X X R f y x 321321321111λλ 整理可得⎪⎪⎪⎩⎪⎪⎪⎨⎧-+-+--+-+--=-+-+--+-+--=)()()()()()()()()()()()(333222333111S A S A S A S A S A S A S A S A S A S A S A S A Z Z c Y Y b X X a Z Z c Y Y b X X a f y Z Z c Y Y b X X a Z Z c Y Y b X X a f x上式即为像点与物点中心投影构像方程。
摄影入门基础知识教程永春职业中专学校许建福一、照相机的结构和原理照相机整体上可以分为两大部分——机身和镜头。
在拍照时,光线由镜头进入,然后传到机身内部的感光元件上,感光元件来感受这些光信息,进而将光信息转化为图片。
1、相机个部分名称2、液晶监视器拍摄设置显示3、取景器内的显示4、模式转盘详解二、摄影基础教程| 曝光三要素曝光是指一个过程,简单来说就是外界景物通过镜头并且在相机感光元件上成像的一个过程。
具体是指针对不同拍摄对象所处的光线环境,洽当运用相机上光圈和快门的组合,来控制通过镜头到达感光材料上的光线强度,是感光材料记录影像的过程。
影响曝光的主要有以下三种因素,即光圈、快门、感光度(iso),也称作是曝光三角。
所谓曝光三角,就是指光圈、快门及ISO,调整这三项就会影响照片的曝光值(EV,即exposure value),所以要得到恰当的曝光就必须要懂得平衡这三角,例如想要提高照片的曝光程度,就要推高ISO、减慢快门或是开大光圈,所谓Auto 模式其实就是由相机代替你来进行这操作。
图中绿色的是光圈,蓝色的是快门,橙色则是ISO,标示来做甚么呢?其实曝光三角除了影响曝光值外,同时还会带来三个重要的影响,从图表就会看得到︰1. 光圈影响景深2. 快门影响动态模糊3. ISO影响噪点曝光三角简易图表1.1光圈光圈大小用f值表示f=镜头光圈的直径/镜头的焦距f 值越小,光圈越大,在同一单位时间内的进光量便越多,而且上一级的进光量刚好是下一级的两倍。
因此,在拍摄过程中光圈有很强的实用性。
例如光圈从f8调整到f5.6 ,进光量便多一倍,我们也说光圈开大了一级。
f5.6的通光量是f8的两倍。
同理,f2是f8光通量的16倍,从f8调整到f2,光圈开大了四级。
对于消费型数码相机而言,光圈f值常常介于f2.8 - f11。
此外许多数码相机在调整光圈时,可以做1/3 级的调整.光圈除了控制进光速率以外还有一个很重要的功能就是控制景深。
计算摄影学基础
摄影学是一门非常重要的学科和技术,它不仅仅是拍照、制作图片,更是一种视觉语言和表达方式。
计算摄影学则是将计算机科学和摄影学结合起来,使用计算机来处理和分析图像。
计算摄影学的发展可以改变我们对数字世界中图像处理的理解和应用。
计算摄影学的基本概念
计算摄影学可以定义为使用计算机来处理图像以及与图像相关的问题的一门学科。
基于对数字图像的理论和实践,计算摄影学涉及计算机视觉、计算机图形学、信号处理等学科,它开辟了人类视觉模式的新视角,并赋予人类以更多的视觉信息。
计算摄影学旨在利用计算机技术来改善图像质量和增强图像的信息,以便进行更准确、更高级别的分析和决策。
计算摄影学的目标包括:图像恢复、图像处理、图像识别、图像分割等。
这些技术广泛应用于计算机辅助医疗、计算机辅助设计、智能交通、机器人视觉、虚拟现实等领域。
计算摄影学的基础知识
在计算摄影学中有很多基础知识,需要掌握才能理解这门学科的核心概念。
以下是一些基础知识:
数字图像的定义
数字图像是由像素构成的点阵图像,其中每个像素都有一个固定的亮度或颜色值。
每个像素的颜色值可以存储在计算机的内存或磁盘上。
数字图像的大小和分辨率决定了图像的质量,通常用像素数和每英寸像素数(DPI)来表示。
数字图像采集
采集数字图像的方法有很多种,包括数码相机、手机、扫描仪、视频摄像机等。
数据采集后,图像需要进行处理,包括去噪、增强、调整、变形等操作。
数字图像的存储
数字图像可以存储在各种存储设备中,例如硬盘、U 盘、CD、DVD等。
存储格式包括BMP、GIF、JPEG、TIF等。
数字图像的处理
数字图像处理包括一系列操作,例如改变图像的尺寸、调整色彩、增强细节和对比度、去噪、锐化等。
这些操作可以通过一些通用的软件进行,例如Photoshop、GIMP、Lightroom等。
计算摄影学的应用
计算摄影学的应用非常广泛,以下是一些实例:
图像识别
图像识别涉及将数字图像与参考模板进行比对,以确定图像中的物体种类和位置。
这个技术可以应用于各种领域,例如计算机视觉、自动驾驶、机器人等。
视觉信息获取
计算摄影学可以提供更多的视觉信息以实现更高级别的决策和分析。
例如,使用计算摄影学技术,医生可以在体内查看器官,把它们分离开来进行更好地处理。
建模
建模是指用3D模型模拟真实世界场景来获取更多信息。
计算摄影学可以用于3D建模中的图片和视频捕捉和处理。
虚拟现实
计算摄影学在虚拟现实领域中的应用,可以创造更逼真的虚拟世界,让用户身临其境,从而更好地体验虚拟现实环境。
总结
计算摄影学融合了计算机技术和摄影学,能够提供更多的视觉信息,使得我们对于数字图像的处理和应用有了更多的科学方法。
计算摄影学广泛应用于各行各业中,对我们的生产生活都有着重要的意义。