9-第九讲-有限元四边形单元
- 格式:ppt
- 大小:1.59 MB
- 文档页数:23
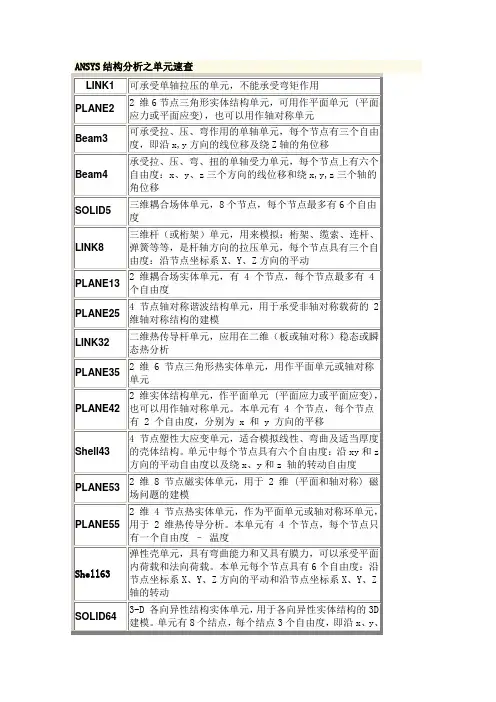
SOLID453-D结构实体单元产品:MP ME ST <> <> PR <> <> <> PP EDSOLID45单元说明solid45单元用于构造三维实体结构.单元通过8个节点来定义,每个节点有3个沿着xyz方向平移的自由度.单元具有塑性,蠕变,膨胀,应力强化,大变形和大应变能力。
有用于沙漏控制的缩减积分选项。
有关该单元的细节参看ANSYS, 理论参考中的SOLID45部分。
类似的单元有适用于各向异性材料的solid64单元。
Solid45单元的更高阶单元是solid95。
图 45.1 SOLID45几何描述SOLID45输入数据该单元的几何形状、结点位置、坐标系如图45.1: "SOLID45 几何描述"所示。
该单元可定义8个结点和正交各向异性材料。
正交各向异性材料方向对应于单元坐标方向。
单元坐标系方向参见坐标系部分。
单元荷载参见结点和单元荷载部分。
压力可以作为表面荷载施加在单元各个表面上,如图45.1: "SOLID45 几何描述"所示。
正压力指向单元内部。
可以输入温度和流量作为单元节点处的体载荷。
节点 I 处的温度 T(I) 默认为 TUNIF。
如果不给出其它节点处的温度,则默认等于 T(I)。
对于任何其它的输入方式,未给定的温度默认为 TUNIF。
对于流量的输入与此类似,只是默认值用零代替了TUNIF。
KEYOPT(1)用于指定包括或不包括附加的位移形函数。
KEYOPT(5)和KEYOPT(6)提供不同的单元输出选项(参见单元输出部分)。
当KEYOPT(2)=1时,该单元也支持用于沙漏控制的均匀缩减(1点)积分。
均匀缩减积分在进行非线性分析时有如下好处:∙相对于完全积分选项而言,单元刚度集成和应力(应变)计算需要更少的CPU时间,而仍能获得足够精确的结果。
∙当单元数量相同时,单元历史存储记录(.ESAV 和 .OSAV)的长度约为完全积分(2×2×2)的1/7。
SOLID453-D结构实体单元产品:MP ME ST <> <> PR <> <> <> PP EDSOLID45单元说明solid45单元用于构造三维实体结构.单元通过8个节点来定义,每个节点有3个沿着xyz方向平移的自由度.单元具有塑性,蠕变,膨胀,应力强化,大变形和大应变能力。
有用于沙漏控制的缩减积分选项。
有关该单元的细节参看ANSYS, 理论参考中的SOLID45部分。
类似的单元有适用于各向异性材料的solid64单元。
Solid45单元的更高阶单元是solid95。
图 45.1 SOLID45几何描述SOLID45输入数据该单元的几何形状、结点位置、坐标系如图45.1: "SOLID45 几何描述"所示。
该单元可定义8个结点和正交各向异性材料。
正交各向异性材料方向对应于单元坐标方向。
单元坐标系方向参见坐标系部分。
单元荷载参见结点和单元荷载部分。
压力可以作为表面荷载施加在单元各个表面上,如图45.1: "SOLID45 几何描述"所示。
正压力指向单元内部。
可以输入温度和流量作为单元节点处的体载荷。
节点 I 处的温度 T(I) 默认为 TUNIF。
如果不给出其它节点处的温度,则默认等于 T(I)。
对于任何其它的输入方式,未给定的温度默认为 TUNIF。
对于流量的输入与此类似,只是默认值用零代替了TUNIF。
KEYOPT(1)用于指定包括或不包括附加的位移形函数。
KEYOPT(5)和KEYOPT(6)提供不同的单元输出选项(参见单元输出部分)。
当KEYOPT(2)=1时,该单元也支持用于沙漏控制的均匀缩减(1点)积分。
均匀缩减积分在进行非线性分析时有如下好处:∙相对于完全积分选项而言,单元刚度集成和应力(应变)计算需要更少的CPU时间,而仍能获得足够精确的结果。
∙当单元数量相同时,单元历史存储记录(.ESAV 和 .OSAV)的长度约为完全积分(2×2×2)的1/7。
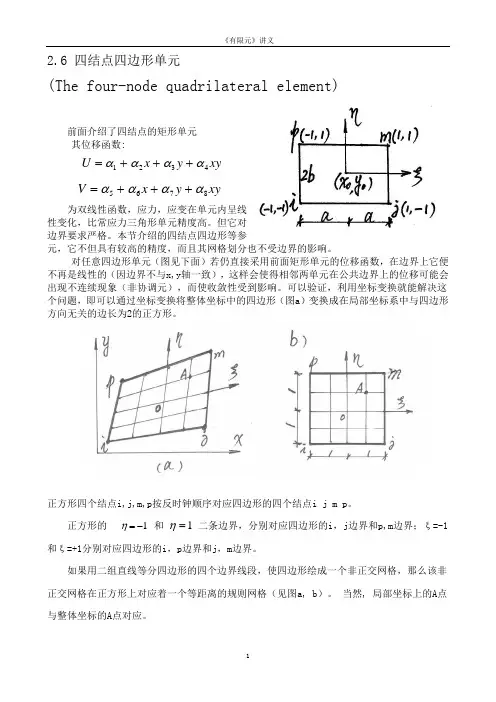
2.6 四结点四边形单元(The four-node quadrilateral element)前面介绍了四结点的矩形单元其位移函数:xy y x U 4321αααα+++=xy y x V8765αααα+++=为双线性函数,应力,应变在单元内呈线性变化,比常应力三角形单元精度高。
但它对边界要求严格。
本节介绍的四结点四边形等参元,它不但具有较高的精度,而且其网格划分也不受边界的影响。
对任意四边形单元(图见下面)若仍直接采用前面矩形单元的位移函数,在边界上它便不再是线性的(因边界不与x,y 轴一致),这样会使得相邻两单元在公共边界上的位移可能会出现不连续现象(非协调元),而使收敛性受到影响。
可以验证,利用坐标变换就能解决这个问题,即可以通过坐标变换将整体坐标中的四边形(图a )变换成在局部坐标系中与四边形方向无关的边长为2的正方形。
正方形四个结点i,j,m,p 按反时钟顺序对应四边形的四个结点i j m p 。
正方形的 1-=η 和 1=η 二条边界,分别对应四边形的i ,j 边界和p,m 边界;ξ=-1和ξ=+1分别对应四边形的i ,p 边界和j ,m 边界。
如果用二组直线等分四边形的四个边界线段,使四边形绘成一个非正交网格,那么该非正交网格在正方形上对应着一个等距离的规则网格(见图a, b )。
当然, 局部坐标上的A 点与整体坐标的A 点对应。
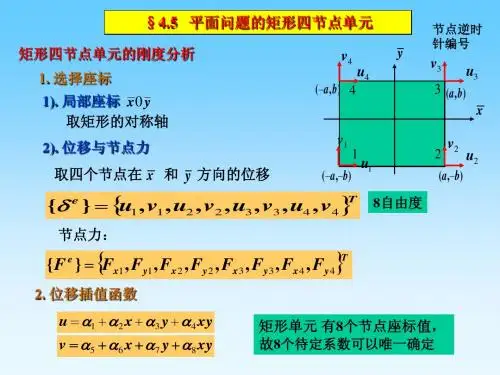
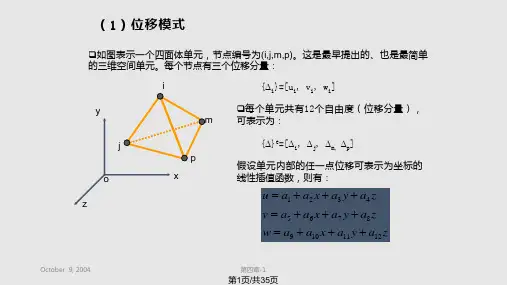
一、四结点四边形等参单元的形函数及坐标变换由于可以将整体坐标下的四边形单元变换成局部坐标下的正方形单元,对于这种正方形单元,自然仍取形函数为: ξηαηαξαα2321+++=U ξηαηαξαα8765+++=V引入边界条件,即可得位移函数:∑=ijmpi i U N Ui ijmpi V N V ∑==写成矩阵形式:{}{}[]{}ee p i p i ed N d N N N N V U f =⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧=000 式中形函数: ()()()ηηξξηξi i i N ++=1141, ()p m j i ,,, 按照等参元的定义,我们将坐标变换式亦取为: p p m m j j i i i ijmpi x N x N x N x N x N x +++==∑p p m m j j i i i ijmpi y N y N y N y N y N y +++==∑ ()162-- 式中形函数N 与位移函数中的完全一致。
第二章单元在显式动态分析中可以使用下列单元:·LINK160杆·BEAM161梁·PLANE162平面·SHELL163壳·SOLID164实体·COMBI165弹簧阻尼·MASS166质量·LINK167仅拉伸杆本章将概括介绍各种单元特性,并列出各种单元能够使用的材料类型。
除了PLANE162之外,以上讲述的显式动态单元都是三维的,缺省时为缩减积分(注意:对于质量单元或杆单元缩减积分不是缺省值)缩减积分意味着单元计算过程中积分点数比精确积分所要求的积分点数少。
因此,实体单元和壳体单元的缺省算法采用单点积分。
当然,这两种单元也可以采用全积分算法。
详细信息参见第九章沙漏,也可参见《LS-DYNA Theoretical Manual》。
这些单元采用线性位移函数;不能使用二次位移函数的高阶单元。
因此,显式动态单元中不能使用附加形状函数,中节点或P-单元。
线位移函数和单积分点的显式动态单元能很好地用于大变形和材料失效等非线性问题。
值得注意的是,显单元不直接和材料性能相联系。
例如,SOLID164单元可支持20多种材料模型,其中包括弹性,塑性,橡胶,泡沫模型等。
如果没有特别指出的话(参见第六章,接触表面),所有单元所需的最少材料参数为密度,泊松比,弹性模量。
参看第七章材料模型,可以得到显式动态分析中所用材料特性的详细资料。
也可参看《ANSYS Element Reference》,它对每种单元作了详细的描述,包括单元的输入输出特性。
2.1实体单元和壳单元2.1.1 SOLID164SOLID164单元是一种8节点实体单元。
缺省时,它应用缩减(单点)积分和粘性沙漏控制以得到较快的单元算法。
单点积分的优点是省时,并且适用于大变形的情况下。
当然,也可以用多点积分实体单元算法(KEYOPT(1)=2);关于SOLID164的详细描述,请参见《ANSYS Element Reference》和《LS-DYNA Theoretical Manual》中的§3.3节。
有限元四边单元网格模型的参数化重建I. 引言- 研究背景- 研究目的- 四边单元网格模型的重要性II. 相关技术介绍- 有限元方法及其应用- 四边单元网格模型的特点与应用- 数字化建模技术及其应用- 参数化建模技术及其应用III. 四边单元网格模型的参数化重建- 模型构建流程与步骤- 空间特征的提取与处理- 模型网格化与优化- 参数化建模与自动化设计- 实现案例与分析IV. 实验结果与讨论- 模型重建的可行性与可靠性- 模型参数化建模的效率与精度- 模型自动化设计的优越性与局限性- 不同参数化方式的比较与分析V. 结论与展望- 本文研究的主要结论- 对未来相关研究的展望- 研究成果的应用前景I. 引言随着计算机技术不断发展和完善,数字化建模技术得到了广泛应用,为工程设计、制造和生产等领域提供了强有力的支持和保障。
其中,有限元方法在应用中得到了广泛的认可和应用,成为了解决工程问题的主流方法之一。
而四边单元网格模型作为有限元分析中最常用的一类模型,在各个领域也得到了广泛的应用。
本文旨在研究四边单元网格模型的参数化重建方法,探索如何通过数字化建模技术将三维空间中的物体转化为离散的网格模型,并通过参数化建模的方式实现自动化设计。
本文主要分为以下几个部分。
第二章,介绍了有限元方法及其应用,四边单元网格模型的特点与应用,数字化建模技术及其应用,参数化建模技术及其应用等相关技术。
第三章,重点介绍了四边单元网格模型的参数化重建方法。
通过模型构建流程和步骤,对空间特征的提取与处理、模型网格化与优化、参数化建模与自动化设计等方面进行了详细的介绍和分析,最终实现了参数化建模与自动化设计的目标。
第四章,介绍了实验结果和讨论。
主要关注模型重建的可行性和可靠性,模型参数化建模的效率和精度,以及不同参数化方式的比较和分析。
第五章,总结了本文的研究结论和成果,并对未来进一步研究的方向和展望进行了讨论。
同时,也探讨了本文研究成果的应用前景和展望。

四边形单元缩减积分有限元理论说明1. 引言1.1 概述在有限元分析中,四边形单元缩减积分有限元是一种有效的近似计算方法。
它能够显著减小大型结构仿真中的计算量,提高计算效率和准确性。
四边形单元缩减积分有限元通过将原始网格划分为小区域,并利用该区域内节点场的局部函数来代替全局函数,从而降低了计算复杂度。
这种方法在工程领域得到了广泛的应用。
1.2 文章结构本文将首先介绍四边形单元缩减积分有限元方法的基本概念和原理。
然后,将详细讨论该方法在实际工程中的应用及其优势。
接下来,我们将使用一个具体案例进行分析,以验证该方法在实际问题中的可行性和有效性。
最后,文章将总结研究结果,并探讨该方法可能存在的局限性及未来发展方向。
1.3 目的本文旨在全面介绍四边形单元缩减积分有限元方法,并深入研究其在工程实践中的应用情况。
通过案例研究和对比分析,我们将评估该方法的准确性和可靠性,并探讨其在未来研究中的潜力和可能的改进方向。
这将有助于工程界更好地理解该方法的优势和局限性,并根据具体应用场景做出正确的选择和决策。
2. 正文:2.1 四边形单元缩减积分有限元基本概念在有限元分析中,四边形单元是一种常用的离散单元,用于模拟结构体系的行为。
然而,在进行数值计算时,四边形单元所包含的内部节点和自由度数量庞大,导致计算复杂度较高。
因此,引入四边形单元缩减积分有限元方法能够有效地降低计算成本。
四边形单元缩减积分有限元是一种通过将四边形单元内部节点上的解自由度与表面节点上的载荷耦合起来来实现缩减积分的方法。
其基本思想是通过适当的插值函数将表面节点上的载荷传递到单元内部,并利用约束条件消除表面节点上额外引入的自由度。
这样就可以将原本需要对整个单元进行数值积分操作转化为只需对表面节点进行数值积分操作,从而大幅简化了计算过程。
2.2 四边形单元缩减积分有限元的原理与方法四边形单元缩减积分有限元方法主要包括以下步骤:首先,将四边形单元中的所有自由度分为内部节点自由度和表面节点自由度两类。
quadrilateral element什么是四边形单元。
四边形单元(quadrilateral element)是有限元分析中的一种基本单元,用于对结构进行数值计算和分析。
它由四条直线段所围成,形状接近一个四边形,因此得名“四边形单元”。
在实际工程中,四边形单元常用于模拟和分析各种结构的力学行为和变形特性,如土木工程、机械工程和车辆工程等。
本文将一步一步回答四边形单元的定义、结构、特点和应用等方面的问题。
第一步,我们先来了解四边形单元的定义和结构。
四边形单元是一个平面结构的有限元单元,它由四个节点和四个边组成,这四个节点分别是四边形的四个顶点,四个边是相邻顶点之间连接起来的直线段。
这四个节点和四条边将整个四边形单元划分为若干个网格,这些网格是有限元分析中的最小计算单元。
四边形单元除了有四个节点和四个边之外,还有一些与节点和边相关的性质,比如节点的坐标、节点之间的连通关系和边的长度等。
第二步,我们来探讨四边形单元的特点。
四边形单元具有许多有利的特点,使其在有限元分析中得到广泛应用。
首先,四边形单元形状简单,易于计算和建模。
其次,四边形单元的计算效率较高,可以实现较快的计算速度。
此外,四边形单元还可以适应不同形状和尺寸的结构,具有较强的适应性。
最后,四边形单元还具有较好的数值稳定性和计算精度,可以较准确地模拟结构的力学行为和变形特性。
第三步,我们来讨论四边形单元的应用。
四边形单元广泛应用于各种结构的有限元分析中。
在土木工程中,四边形单元可以用来模拟和分析各种土木结构,如桥梁、建筑物和地基等。
在机械工程中,四边形单元可以用来模拟和分析机械结构的力学行为,如工件和机器构件等。
在车辆工程中,四边形单元可以用来模拟和分析汽车和飞机等交通工具的受力和变形情况。
除此之外,四边形单元还可以用于地震工程、船舶工程和电力工程等领域。
综上所述,四边形单元是有限元分析中的一种基本单元,由四个节点和四个边组成,用于模拟和分析各种结构的力学行为和变形特性。
第二章单元在显式动态分析中可以使用下列单元:·LINK160杆·BEAM161梁·PLANE162平面·SHELL163壳·SOLID164实体·COMBI165弹簧阻尼·MASS166质量·LINK167仅拉伸杆本章将概括介绍各种单元特性,并列出各种单元能够使用的材料类型。
除了PLANE162之外,以上讲述的显式动态单元都是三维的,缺省时为缩减积分(注意:对于质量单元或杆单元缩减积分不是缺省值)缩减积分意味着单元计算过程中积分点数比精确积分所要求的积分点数少。
因此,实体单元和壳体单元的缺省算法采用单点积分。
当然,这两种单元也可以采用全积分算法。
详细信息参见第九章沙漏,也可参见《LS-DYNA Theoretical Manual》。
这些单元采用线性位移函数;不能使用二次位移函数的高阶单元。
因此,显式动态单元中不能使用附加形状函数,中节点或P-单元。
线位移函数和单积分点的显式动态单元能很好地用于大变形和材料失效等非线性问题。
值得注意的是,显单元不直接和材料性能相联系。
例如,SOLID164单元可支持20多种材料模型,其中包括弹性,塑性,橡胶,泡沫模型等。
如果没有特别指出的话(参见第六章,接触表面),所有单元所需的最少材料参数为密度,泊松比,弹性模量。
参看第七章材料模型,可以得到显式动态分析中所用材料特性的详细资料。
也可参看《ANSYS Element Reference》,它对每种单元作了详细的描述,包括单元的输入输出特性。
2.1实体单元和壳单元2.1.1 SOLID164SOLID164单元是一种8节点实体单元。
缺省时,它应用缩减(单点)积分和粘性沙漏控制以得到较快的单元算法。
单点积分的优点是省时,并且适用于大变形的情况下。
当然,也可以用多点积分实体单元算法(KEYOPT(1)=2);关于SOLID164的详细描述,请参见《ANSYS Element Reference》和《LS-DYNA Theoretical Manual》中的§3.3节。
有限元三角形单元和四边形单元
有限元分析是工程应用最广泛的方法之一,它可以帮助我们了解结构内部力学行为特征。
对于有限元分析来说,有两种典型的单元:三角形单元和四边形单元。
三角形单元由三个顶点组成,四边形单元由四个顶点组成。
其基本概念是根据有限元分析的原则,将被研究的区域分解成若干个小的连续单元,单元由每个顶点表示,并且形成多边形,以此来模拟物体总体的行为。
三角形单元的特性是它的每个内角都能满足三角函数,可以极大的提高计算质量,避免出现趋势不准确的情况。
在较大范围内,一致性面积越小,他们之间的拉伸应力也就越小,更有利于精确计算。
而四边形单元则更加适合于细粒度的物体,在对细粒度物体进行研究时,可以将其细分成多个正方形小块,从而简化计算难度,提高计算效率。
在有限元分析中,三角形单元和四边形单元可以因应不同的需求而采用,只要能充分构建出更准确的结构行为模型,增加更多的灵活性和应用场景就可以得到更精准的计算结果。