理论力学:欧拉动力学方程
- 格式:pdf
- 大小:653.15 KB
- 文档页数:25

M Ω b bb 牛顿-欧拉方程欧拉方程(Euler equations),是欧拉运动定律的定量描述,欧拉运动定律是牛顿运动定律的延伸,在牛顿发表牛顿运动定律超过半个世纪后,于 1750 年,欧拉才成功的用欧拉方程表述了该定律:Ωb = I ‒ 1[M ‒ Ω × ( I Ω )]该方程是建立在角动量定理的基础上的描述刚体的旋转运动时 '刚体所受外力矩 与角加速度 的关系式,大多时候可简写成:Ω' = [M + (I ‒ I )Ω Ω ]/Ix x yy zz y x xx Ω' = [M + (I ‒ I )Ω Ω ]/I y y zz xx x z yy Ω' = [M + (I ‒ I )Ω Ω ]/Ixzzzyyx yzz其中,M x ,M y ,M z 分别为刚体坐标系S b 下三个轴的所受的外力矩, I xx ,I yy ,I zz 分别为刚体三个坐标轴的转动惯量(刚体坐标系下S b )。
欧拉方程通常与牛顿的平移运动方程被一起写出,称为牛顿-欧拉方程(Newton-Euler equations):F (t ) = ma (t )M b = Ωb × ( I b Ωb ) + I b Ωb这里对牛顿的平移运动方程不赘述,只对欧拉方程进行讨论。
1. 单质点角动量定理 质点旋转时,有动量定理:F =d (mv ) dtr × F = r × d (mv )对两边叉乘质点位置矢量r :dt b b观察:d (r × mv ) = r × d (mv ) + dr × mv因为:dt dt dt故有:dr× mv = v × mv = 0 dtd (r × mv ) = r × d (mv )dt dtr × F =d (r × mv )dt定义角动量L = r × mv ,可以看出r × F 为外力矩M故有单质点的角动量定理:2. 刚体的角动量定理M =dL dt定义刚体的角动量为:L G =∫L idm其中:L G 下标 G 表示该向量为大地坐标系S G 下的,L i 的下标 i 表示该向量为大地坐标S G 下各个质量元的向量。
欧拉方程 (刚体运动)莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。
对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。
所以,刚体的取向可以用三个基本旋转矩阵来决定。
换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。
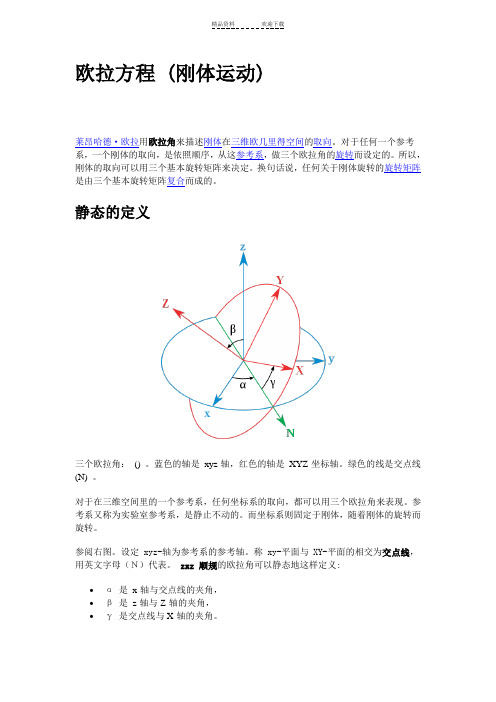
静态的定义三个欧拉角:() 。
蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。
绿色的线是交点线(N) 。
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
参考系又称为实验室参考系,是静止不动的。
而坐标系则固定于刚体,随着刚体的旋转而旋转。
参阅右图。
设定 xyz-轴为参考系的参考轴。
称 xy-平面与 XY-平面的相交为交点线,用英文字母(N)代表。
zxz 顺规的欧拉角可以静态地这样定义:∙α是x-轴与交点线的夹角,∙β是z-轴与Z-轴的夹角,∙γ是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。
实际上,有许多方法可以设定两个坐标系的相对取向。
欧拉角方法只是其中的一种。
此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。
因此,使用欧拉角前,必须先做好明确的定义。
[编辑]角值范围∙值从0 至2π弧度。
∙β值从0 至π弧度。
对应于每一个取向,设定的一组欧拉角都是独特唯一的;除了某些例外:∙两组欧拉角的α,一个是0 ,一个是2π,而β与γ分别相等,则此两组欧拉角都描述同样的取向。
∙两组欧拉角的γ,一个是0 ,一个是2π,而α与β分别相等,则此两组欧拉角都描述同样的取向。
[编辑]旋转矩阵前面提到,设定刚体取向的旋转矩阵是由三个基本旋转矩阵合成的:单独分开作用,每个矩阵各自代表绕着其转动轴的旋转;但是,当它们照次序相乘,∙最里面的(最右的) 矩阵代表绕着z 轴的旋转。

第一章 质点运动学§1-1 质点运动的矢量描述与直角坐标描述一、参考系和坐标系有一定大小且不变形的物体, 或几个相对位置保持不变的物体, 都可以作为参考系. 一个点不能作参考系!坐标系可以看成是由坐标曲线组成的带有标度的空间网格.各种坐标系的坐标曲线都在它们的交点处互相正交, 都属于正交曲线坐标系.沿质点所在位置的坐标曲线切线方向建立的一组单位矢量称为坐标系的基矢. 直角坐标系Oxyz (坐标曲线321,,c z c y c x ===),基矢为单位矢量k j i ,,, 按惯例我们使用的坐标系 全是右手正交系, 其基矢满足如下关系: k j i =× 0=⋅=⋅=⋅i k k j j i 若坐标系的空间网格相对参考系固定不动, 则该坐标系相对参考系固定不动, 这时我们称该 坐标系与参考系固连.二、自由度我们称确定力学系统位置所需要的独立坐标 数为系统的自由度, 自由度记为s .三、运动学方程和轨道图中我们用直角坐标系Oxyz 代表参考系, 位置矢量(简称位矢)r e r r = )(t r r =称为质点的运动学方程, 它包括了质点运动的全 部信息. 质点运动的轨道即为位置矢量r 的矢端曲线.在直角坐标系Oxyz 中 k z j y i x r ++=运动学方程的分量形式为)(),(),(t z z t y y t x x ===由式中消去时间t , 则得到轨道方程.四、位移和路程位移是质点位置矢量的增量, )()Δ(Δt r t t r r −+=路程是质点沿轨道走过的长度, 为一恒正标 量, 记为s ∆,AB s =∆弧长.注意s r ΔΔ≠s r ΔΔ≠r r ΔΔ≠但当0Δ→t 时,B A ,间弦长与弧长相等, s r ∆→∆ , 或记为s r d d =五、速度瞬时速度矢量简称为速度, 被定义为位置矢量对时间的导数,r t r t r v t ==∆∆=→∆d d lim 0 速度的方向沿轨道 (即r 的矢端曲线) 的切线指向运动的前方, 它的大小为速率v ,s ts t rt r v v t ===∆∆==→∆d d d d lim0 在直角坐标系Oxyz 中, k z j y i x v ++=.六、加速度瞬时加速度矢量简称加速度, 定义为速度对时间的导数,r t r v t v t v a t ====∆∆=→∆220d d d d lim 加速度a 一定指向轨道的凹侧. 若将不同时刻的速度矢量的矢尾集中于一点, 则可得出速度矢量v 的矢端曲线即速端曲线. 加速度a 沿速端曲线切线方向并指向v 的矢端沿速端曲线运动的前方, 加速度的大小a 等于v 的矢端沿速端曲线运动的速率.任意矢量A 对时间的导数A 的方向沿A 的矢端曲线的切线, 其指向与A 的矢端沿矢端曲线的运动方向一致; A 的大小即A 的矢端沿矢端曲线运动的速率.在直角坐标系Oxyz 中, k zj y i x k v j v i v a z y x ++=++=§1-2 质点运动的平面极坐标描述当质点被限制在一个平面上运动时, 其自由度2=s , 我们建立与参考系固连的极坐标系. 质点P 的位置由坐标量r 和θ确定, 要明确极角θ的正方向 (即θ的增加方向)!平面极坐标系是正交曲线坐标系, 其平面坐标网格由一组同心圆(1c r =)及一组放射状半直线(2c =θ)组成.平面极坐标系的基矢为r e 和θe .0=⋅θe e r .r e 的方向为径向, θe 的方向为横向.)(θr r e e = ,)(θθθe e =. 我们把矢量沿质点所在位置的基矢 “就地” 进行正交分解.在极坐标系中, 质点的运动学方程为[])()(t e t r r r θ =标量形式)(),(t t r r θθ==消去时间t , 则得到轨道方程0),(=θr f .根据速度的定义, 把[])()(t e t r r r θ = 对时间求导数, 得到 t e r e t r t r v r r d d d d d d +==下面求单位矢量r e 的时间 导数t e r d d ,t e t t e t t e t e r t r r t r ∆∆=∆−∆+=→∆→∆ 00lim )()(lim d d 当0→∆t 时,0→∆θ. 注意到由r e 及r e ∆组成的矢量三角形为腰长为1的等腰三角形, 所以当0→∆t 时r e ∆与r e 垂直, 且θ∆⋅=∆1r e . 由于0→∆θ且0Δ>θ时r e ∆与θe 方向相同, 所以0→∆t 时θθe e r ⋅∆=∆, 故 θθθθe e tt e t r ⋅=∆∆=→∆0lim d d于是得到极坐标系中的速度表达式,θθe r e rv r += rv r =称为径向速度, θθ r v =称为横向速度. 根据加速度的定义,得)(d d d d θθe r e r tt v a r +==t e r e r e r e r e r r d d θθθθθθθθ ++++=下面改换一个方法求t e d d θ . 由于θe 为单位矢量, 故θe 的矢端曲线为半径为1的单位圆. 0Δ>θ 时, θe 的矢端沿其矢端曲线运动的速率为θ ⋅1, t e d d θ 的方向沿矢端曲线切线, 其指向如图所示,故可知 r e te θθ−=d d 同样,θθe t e r =d d于是得到极坐标系中加速度的表达式θθθθe r r e r r a r )2()(2++−=2θ r r a r −=和θθθ r r a 2+=分别称为径向加速度和横向加速度.矢量的变化为矢量大小的变化及矢量方向的变化二者产生效果的叠加, 请读者试用这种观点分析式中各项是如何产生的. 还可用运动分解和合成的观点理解式中各项的意义.例题1半径为R 的铁圈上套一小环P , 直杆OA 穿过小环P 并绕铁圈上O 点以匀角速度ω转动. 求小环P 的运动方程、 轨道方程、 速度和加速度.解 如图所示建立极坐标系,设0=t 时0θθ=, 则运动学方程为+=+=00)cos(2θωθθωt t R r 轨道方程为θcos 2R r =速度和加速度为 θθe r e r v r += θθωωθωωe t R e t R r )cos(2)sin(200+++−= θθθθe r r e r r a r )2()(2++−= θθωωθωωe t R e t R r )sin(4)cos(40202+−+−=本例题也可用图中直角坐标系xyz O 2求解, 由读者自行完成. 请读者另行验证:(1) 不同方法中a v ,表达式不同, 但它们对描述P点运动是等价的;(2) 不同方法中a v ,的大小和方向是惟一确定的.例题1是运动学正问题, 即先写出运动学方程,通过求导数运算求出v 和a . 运动学逆问题是已知速度或加速度及初条件求运动学方程, 使用的数学方法是积分或解微分方程, 和正问题比较要复杂一些, 但只要把握解题的方向也是不难解决的.例题2 已知一质点做平面运动, 其速率为常量c ,其位置矢量转动的角速度亦为常量0ω,试求质点的运动学方程及轨道方程. 设0=t 时,0=r , 0=θ.解 由已知条件ωθ= (1) 2222c r r =+θ (2) 把(1)是式化为t d d 0ωθ=,积分并由0=t 时0=θ定积分常数,可得t 0ωθ= (3)把(1)式代入(2)式,分离变量得t r c r d d 2202±=−ω 积分并以0=t 时0=r 定积分常数,得t c r 00sin ωω±= (4) (3)(4)二式即为运动学方程=±=t t c r 000sin ωθωω 消去t 得轨道方程θωsin 0c r ±= 轨道为两个圆,如图所示.柱坐标系可以看成是由Oxy 平面内的极坐标系 (坐标量为ρ和θ) 及z 轴构成的三维空间坐标系. 其空间坐标网格由1c =ρ的圆柱面、 2c =θ的放射状半平面和3c z =的平面3组曲面相交形成的曲线所组成. 质点位置由坐标量z ,,θρ确定. 柱坐标系的基矢为单位矢量θρe e ,和k . 柱坐标系为右手正交系, 其基矢满足如下关系:k e e =×θρ质点的运动学方程为 []k t z t e t t r r )()()()(+==θρρ速度和加速度的表达式为 k z e e v ++=θρθρρk z e e a +++−=θρθρθρθρρ)2()(2 推导请仿照§1-2自己完成.球坐标系如图所示, 质点P 的位置由坐标量ϕθ,,r 确定. 球坐标系的空间坐标网格由1c r =的球面、 2c =θ的圆锥面和3c =ϕ的放射状半平面3组曲面相交形成的曲线所组成.球坐标系的基矢为r e ,θe ,ϕe .r e 沿位矢r 的方向, θe 和ϕe 的指向与θ和ϕ的正方向一致. 球坐标系为右手正交系, 其基矢满足如下关系:ϕθe e e r =×0=⋅=⋅=⋅r r e e e e e e ϕϕθθ球坐标系中的θ亦称为极角、 ϕ称为方位角. 球坐标系中的基矢不是常矢量, 其中r e 为θ和ϕ的函数. 我们把矢量沿质点所处位置的基矢r e ,θe 和ϕe “就地”进行正交分解.质点的运动学方程为 [])(),()()(t t e t r t r r r ϕθ ==下面我们从速度的定义导出球坐标系中的速度表达 式. 将r ∆沿t 时刻质点所在位置的基矢正交分解, 得到ϕθe s e s e s r r 321∆+∆+∆=∆当0→∆t 时, r s ∆→∆1,2s ∆和3s ∆可用坐标曲线上的弧长来表示, 即θ∆→∆r s 2和ϕθ∆⋅→∆sin 3r s 于是可知 t e r e r e r t r t r v r t t ∆∆⋅+∆+∆=∆∆==→∆→∆ϕθϕθθ sin lim lim d d 00 ϕθθϕθe r e r e rr sin ++= 球坐标系中的加速度公式可按矢量导数定义求导得出, 但比较复杂, 我们将在后面用分析力学的方法导出.§1-5 质点运动的自然坐标描述利用质点运动轨道本身的几何特性 (如切线、法线方向等)来描述质点的运动. 这种方法称为自然坐标法.一、弧长方程在轨道上取一点作原点O , 规定沿轨道的某一方向为弧长的正方向, 质点位置可由原点O 到质点间的一段弧长s 来确定, s 称为弧坐标.)(t s s =上式称为弧长方程. 弧长方程和轨道方程一起与质点的运动学方程等价.弧坐标s 为可正可负的标量, 与恒正的路程是不同的.二、相关的微分几何知识轨道上无限接近的两个点所决定的直线称为切线. 定义切向单位矢量t e 沿切线, 其指向与弧长正方向一致. 沿t e 的方向称为切向.轨道上无限接近的3个点确定的平面, 即无限接近的两条切线所确定的平面, 称为密切面.密切面取向的改变反映了曲线的挠曲情况.轨道曲线上无限接近的3个点所决定的圆称为曲率圆, 曲率圆在密切面内. 曲率圆的圆心称为曲率中心, 曲率圆的半径ρ称为曲率半径, 曲率半径的倒数ρκ1=称为曲率.设弧长s P P d =′, 显然s d d 1ϕρκ==, 曲率κ越大则曲线弯曲程度越大. 当轨道为平面曲线)(x y y =时, 可利用数学分析中的公式 []23222)d d (1d d 1x y x y +==ρκ求曲率κ及曲率半径ρ.过轨道上一点, 与切线垂直的线称为法线. 法线有无限多条,它们组成的平面称为法平面.密切面内的法线称为主法线, 定义主法向单位矢量n e 沿主法线指向曲率中心. 沿n e 的方向称主法向, n e 指向轨道凹侧.垂直于密切面的法线称为副法线. 定义副法向单位矢量b e 沿副法线, 指向n t e e ×的方向.n t b e e e ×=沿b e 的方向为副法向.单位矢量b n t ,,e e e 两两互相垂直, 并成右手螺旋关系.三、速度和加速度表达式把质点的速度和加速度沿质点所在处的单位矢量b n t ,,e e e “就地”正交分解, 进而导出质点的速度和加速度表达式.速度沿切线指向运动的前方, 所以0b n ==v v . 考虑到0>s 时v 与t e 同向, 故 t t t e se v v == 速度的大小sv v v ===t . 由加速度的定义 t e s e s e s t t v a d d )(d d d d t t t +===当ϕ的正向与弧长s 正向一致时, ϕρd d =s ,故ρρϕt v s == . 所以 n n n t d d 1d d e s e e t t e ρϕϕ==⋅=因此 n t e s e s a ρ2+=s v a ==t t 称为切向加速度, 是由于速度t t e v v =的大小改变而产生的. ρρ22n s v a ==称为法向加速度, 是由于速度的方向改变而产生的. 由于n a 恒正, 故a 一定指向轨道凹侧, 与§1-1中结论一致. 0b ≡a 说明对任何空间曲线运动,加速度a 必在密切面内, 这是加速度和密切面定义导致的必然结果.注意原点O 的选定和弧长正方向的规定! 在自然坐标描述中, 需要已知质点运动的轨道, 而对轨道的数学描述又需要一个坐标系, 所以必须掌握自然坐标描述中的物理量与其他坐标系中的物理量之间的联系. 建立这个联系的基本依据是: 速度v 和加速度a 在不同的描述方法中有不同的表达形式, 但它们的大小和方向是惟一确定的.例题1半径为R 的铁圈上套一小环P , 直杆OA 穿过小环P 并绕铁圈上O 点以匀角速度ω转动. 求小环P 的运动方程、 轨道方程、 速度和加速度.解 曾用如图所示建立极坐标系求解.此例题也可用自然坐标法求解: 以1O 为原点,规定弧长正方向如图所示.轨道已知,弧长方程为)(20θω+=t R s速度和加速度为 t e R e s v ω2t == n 2n 2t 4)(e R e s e sa ωρ=+= 比其它方法简单!自然坐标描述并不是自然坐标系中的描述.请读者验证: (1) 不同方法中a v ,表达式不同, 但它们对描述P点运动是等价的; (2) 不同方法中a v ,的大小和方向是惟一确定的.例题3 已知质点的运动学方程为t R x ωcos = t R y ωsin = t h z ωπ2= (h R ,,ω为常量)试分析质点的运动,求切向加速度、法向加速度及轨道的曲率半径。

牛顿-欧拉方程欧拉方程(Eulerequations),是欧拉运动定律的定量描述,欧拉运动定律是牛顿运动定律的延伸,在牛顿发表牛顿运动定律超过半个世纪后,于1750年,欧拉才成功的用欧拉方程表述了该定律:该方程是建立在角动量定理的基础上的描述刚体的旋转运动时刚体所受外力矩与角加速度的关系式,大多时候可简写成:其中,分别为刚体坐标系下三个轴的所受的外力矩,分别为刚体三个坐标轴的转动惯量(刚体坐标系下)。
欧拉方程通常与牛顿的平移运动方程被一起写出,称为牛顿-欧拉方程(Newton-Euler equations):这里对牛顿的平移运动方程不赘述,只对欧拉方程进行讨论。
1.单质点角动量定理质点旋转时,有动量定理:对两边叉乘质点位置矢量:观察:因为:故有:定义角动量,可以看出为外力矩故有单质点的角动量定理:2.刚体的角动量定理定义刚体的角动量为:其中:下标G表示该向量为大地坐标系下的,的下标i 表示该向量为大地坐标下各个质量元的向量。
刚体旋转运动参考的惯性系是大地坐标系,不能把采用刚体的本身坐标系作为参考系,本身坐标系的提出只是方便我们某些量的分析与表述,如角速度、惯性张量。
(这里需要特别说明的是因为刚体质量分布不均匀的原因,角动量的方向往往不与刚体角速度方向一致,这也是无力矩进动的原因,即很多时候刚体角速度不守恒但刚体的角动量守恒了,宏观来看就是因为要保证角动量和动量守恒所以才要产生内力作用使角速度变化达到守恒的效果。
)由牛顿第三定律易知内力矩产生的角动量变化相抵,故有刚体的角动量定理:其中:为外力矩把上式展开有:其中:称为惯性矩阵刚体旋转时,是变化的,但刚体在刚体坐标系下的惯性矩阵不会变,且容易分析得到:其中:为刚体坐标系下到大地坐标系的旋转矩阵。
3.欧拉方程的证明在先证欧拉方程前,先给出几个刚体坐标系下的向量:外力矩:;惯性矩阵:;角速度:引入刚体坐标系的向量:旋转运动时:旋转矩阵,刚体角速度都为变量,只有为不变量。
欧拉方程推导过程概述欧拉方程(Euler’s equation)是描述流体运动的基本方程之一,它是由瑞士数学家欧拉(Leonhard Euler)在18世纪提出的。
欧拉方程在流体力学、空气动力学等领域具有广泛的应用。
本文将介绍欧拉方程的推导过程,以及一些相关的概念。
基本假设在推导欧拉方程之前,我们需要先明确一些基本假设和定义: 1. 流体是连续的:假设流体是连续、无限可分的。
这意味着我们可以对流体的性质进行连续的观察和分析。
2. 流体是可压缩的:假设流体在运动过程中可以发生密度的变化。
3. 流体满足牛顿力学:假设流体的运动可以用牛顿力学描述,即满足牛顿第二定律。
推导过程为了推导欧拉方程,我们首先需要从基本假设出发,利用牛顿第二定律来描述流体运动。
1. 守恒方程守恒方程是流体力学中的基本方程,描述了质量、动量和能量的守恒。
在欧拉方程的推导中,我们主要关注质量守恒和动量守恒。
1.1 质量守恒质量守恒可以表达为以下形式:∂ρ+∇⋅(ρv)=0∂t其中,ρ表示流体的密度,v表示流体的速度。
该方程描述了密度在空间和时间上的变化。
1.2 动量守恒动量守恒可以表达为以下形式:ρ(∂v ∂t+v ⋅∇v)=−∇p +∇⋅T +ρg 其中,p 表示流体的压强,T 表示应力张量,g 表示重力加速度。
该方程描述了流体的动量在空间和时间上的变化。
2. 应力张量欧拉方程中的应力张量T 描述了流体内部的相互作用力。
它可以通过牛顿第二定律和基本假设推导得到。
2.1 应力张量的定义应力张量是一个二阶张量,它描述了流体内部各点沿不同方向的力和应变之间的关系。
在流体力学中,应力张量可以表示为:T ij =−pδij +σij其中,p 是流体的压强,δij 是克罗内克(Kronecker )δ符号,σij 是剪切应力张量。
2.2 应力张量的推导为了推导应力张量,我们考虑流体中某一点的受力情况。
由牛顿第二定律可知,该点受到的合力等于质量乘以加速度:F =ma将质量表示为体积乘以密度m =ρV ,并将加速度表示为速度的时间导数a =dv dt ,可以得到:F =ρV dv dt将体积表示为面积乘以厚度V =SΔz ,并将速度的导数表示为时间的偏导数dv dt =∂v ∂t ,可以得到:F =ρSΔz ∂v ∂t当体积趋近于0时,左侧的合力可以表达为面积上的应力乘以面积元dS,即F= TdS。
欧拉方程 (刚体运动)莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。
对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。
所以,刚体的取向可以用三个基本旋转矩阵来决定。
换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。
静态的定义三个欧拉角:() 。
蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。
绿色的线是交点线(N) 。
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
参考系又称为实验室参考系,是静止不动的。
而坐标系则固定于刚体,随着刚体的旋转而旋转。
参阅右图。
设定 xyz-轴为参考系的参考轴。
称 xy-平面与 XY-平面的相交为交点线,用英文字母(N)代表。
zxz 顺规的欧拉角可以静态地这样定义:•α是x-轴与交点线的夹角,•β是z-轴与Z-轴的夹角,•γ是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。
实际上,有许多方法可以设定两个坐标系的相对取向。
欧拉角方法只是其中的一种。
此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。
因此,使用欧拉角前,必须先做好明确的定义。
[编辑]角值范围•值从0 至2π弧度。
•β值从0 至π弧度。
对应于每一个取向,设定的一组欧拉角都是独特唯一的;除了某些例外:•两组欧拉角的α,一个是0 ,一个是2π,而β与γ分别相等,则此两组欧拉角都描述同样的取向。
•两组欧拉角的γ,一个是0 ,一个是2π,而α与β分别相等,则此两组欧拉角都描述同样的取向。
[编辑]旋转矩阵前面提到,设定刚体取向的旋转矩阵是由三个基本旋转矩阵合成的:单独分开作用,每个矩阵各自代表绕着其转动轴的旋转;但是,当它们照次序相乘,•最里面的(最右的) 矩阵代表绕着z 轴的旋转。