第一章 调节系统的基本原理与调节对象特性11
- 格式:ppt
- 大小:1001.00 KB
- 文档页数:47
PID调节一、什么是PID调节及PID调节的基本原理目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
不同的控制系统﹐其传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intelligent regulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
可编程控制器(PLC) 是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet 相连,如Rockwell的PLC-5等。
还有可以实现PID控制功能的控制器,如Rockwell 的Logix产品系列,它可以直接与ControlNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
2、闭环控制系统闭环控制系统(closed-loop control system)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。

目录第一章水轮机调节系统概述及对电力系统中的影响 (2)第一节水轮机调节系统概况 (2)第二节水轮机调节系统对电力系统运行的影响 (6)第二章水轮机调速系统的基本原理 (9)第一节水轮机调速系统的原理及分类 (9)第二节水轮机调速系统的调差参数及不灵敏区 (11)第三章电力系统对调速系统的控制 (13)第一节电力系统频率控制的基本概念 (13)第二节频率的一次调节 (17)第三节自动发电控制(AGC) (18)第一节电力系统频率的二次调节 (24)第四章电力系统的自动发电控制系统 (31)第一节、调度端自动发电控制系统概述 (31)第二节自动发电控制系统(AGC) (32)第三节水电机组的调节能力 (35)第四节水电厂自动控制系统 (38)第一章水轮机调节系统概述及对电力系统中的影响第一节水轮机调节系统概况一、水轮机调节的任务和特点随着电力系统负荷变化,水轮机相应地改变导叶开度(或针阀行程),使机组转速恢复并保持为额定转速的过程,称为水轮机调节。
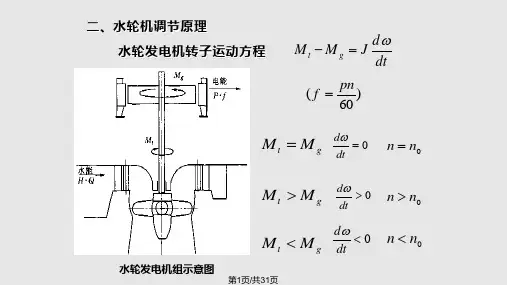
系统负荷发生变化时,对机组产生两方面的影响:系统负荷变化→系统电压发生变化→发电机励磁装置动作→发电机的端电压恢复并保持在许可范围内。
系统负荷变化→系统电流的频率f发生变化,由于f是磁极对数p和转速n 的函数→发电机调速器动作→发电机的转速恢复并保持在许可范围内。
水轮机调节的任务:随外界负荷的变化,迅速改变机组的出力。
维持机组转速在额定转速附近,满足电网一次调频要求;完成调度下达的功率指令,调节水轮机组有功功率,满足电网二次调频要求;完成机组开机、停机、紧急停机等控制任务;执行计算机监控系统的调节及控制指令。
保持机组转速和频率变化在规定范围内,最大偏差不超过±0.5Hz,大电力系统不超过±0.2Hz。
启动、停机、增减负荷,对并入电网的机组进行成组调节(负荷分配),以达到经济合理的运行。
水轮机调节的特点:1.必须具备有足够大的调节功能水轮发电机组是把水能转换成电能的机械.而水能因受自然条件的限制,通常水电站水头在几米至几百米的范围内,水轮机上的压力只有零点儿MPa至几MP,因此,发出较多的电功率,常需相当大的流量,水轮机及其导水机构尺寸也需要相应加大。
水轮机调速器期末复习资料第一章水轮机调节的基本概念水轮机调节系统由被控制系统(调节对象)和被控制系统(调节器)所组成,对水电站而言,调节器就是调速器。
由于水电站是一个水、机、电综合系统,一方面机组与压力引水道有水力上的联系,另一方面又与电力系统有电气上的联系。
因而调节对象包括机组(水轮机和发电机)、引水道和电网。
国家电力部门规定,电网的额定频率为50Hz(赫兹),大电网(容量大于3000MW)允许的频率偏差为±0.2Hz,小电网(容量小于3000MW)允许的频率偏差为±0.5。
水轮机调节的任务就是解决如何能使机组转速(频率)保持在额定值附件的某个范围之内。
水轮机调节的实质就是:根据偏离额定值的转速(频率)偏差信号,调节水轮机的导水机构和轮叶机构,维持水轮发电机机组功率与负荷功率的平衡。
调节进入水轮机的流量,对于混流式水轮机,采用改变导叶开度的办法;对于转桨式水轮机,采用同时协联改变导叶开度和转轮叶片角度的办法;对冲击式水轮机,采用同时协联改变喷针行程和折向器开度的办法来实现。
水轮机调速器是水电站水轮发电机组重要的辅助设备之一,它除了控制机组的转速之外,还与电站二次回路或微机监控系统相配合,完成如下的工作:(1)进行机组的正常操作:机组的开停机、增减负荷以及发电、调相等各种工况的相互切换。
(2)保证机组的安全运行:在各种事故情况下,机组甩掉全部负荷后,调速系统应能保证机组迅速稳定在空载转速或根据指令信号,可靠地紧急停机。
(3)实现机组的经济运行:按要求自动分配机组间的负荷。
按调速器元件结构分类——可分为机械液压型和电气液压型两大类。
按调速器容量的大小分类——可分为大型调速器、中小型调速器和特小型调速器。
按调速器调节规律分类——可分为PI型和PID型调速器。
按调速器所用油压装置和接力器是否单独设置分类——可分为独立式和分离式调速器。
YT-6000;YDT-18000;WST-100型号的含义。
自动调节原理的基本知识目录一、自动调节原理概述 (2)1.1 自动调节原理的定义 (3)1.2 自动调节原理的发展历程 (4)二、自动调节系统的基本组成 (5)2.1 控制对象 (7)2.2 控制装置 (8)2.3 传感器与执行器 (9)三、自动调节原理的基本规律 (11)3.1 反馈控制原理 (12)3.2 前馈控制原理 (13)3.3 线性控制原理 (14)3.4 非线性控制原理 (15)四、自动调节系统的稳定性分析 (16)4.1 稳定性的定义与判据 (18)4.2 稳定性与系统性能的关系 (18)4.3 系统的阻尼与自然频率 (19)五、自动调节系统的精度分析 (21)5.1 精度的定义与评价指标 (22)5.2 影响精度的因素及提高措施 (23)5.3 系统的抗干扰能力与鲁棒性 (24)六、自动调节系统的工程实现 (26)6.1 设计阶段 (27)6.2 制造阶段 (28)6.3 调试与运行阶段 (29)七、自动调节技术的发展趋势 (30)7.1 智能化 (32)7.2 网络化 (33)7.3 微型化与集成化 (34)一、自动调节原理概述自动调节原理是一种广泛应用于工业生产和日常生活中的控制方法,它通过监测和分析系统中的参数,根据设定的目标值自动调整系统的运行状态,以实现对系统性能的优化和稳定。
自动调节原理的基本思想是将系统的输出与期望值进行比较,然后根据误差产生相应的控制信号,使系统的实际输出接近期望值。
这种方法可以有效地提高系统的效率和稳定性,降低能耗和故障率,从而为企业和社会带来经济效益。
自动调节原理的核心是反馈控制,反馈控制是一种基于测量信号与期望值之间的差异来实现控制的方法。
在自动调节系统中,通常会设置一个测量单元(如传感器)来实时监测系统的输入和输出,并将这些信息传送给控制器。
控制器根据这些信息计算出实际输出与期望值之间的误差,然后产生相应的控制信号,通过执行器(如电机、阀门等)调节系统的运行状态,使实际输出逐渐接近期望值。