三相异步电动机直接转矩控制系统仿真报告
- 格式:docx
- 大小:321.99 KB
- 文档页数:6
![毕业设计(论文)-直接转矩控制的异步电机调速系统仿真研究[管理资料]](https://uimg.taocdn.com/c94ae2c6a32d7375a517805e.webp)
引言随着微电子技术、电力电子技术、计算机控制技术的进步,交流电动机调速技术发展到现在,有了长足的进步。
特别是20世纪70年代出现的矢量控制技术和80年代出现的直接转矩控制技术,使交流电动机调速系统的性能可以与直流电动机调速系统的性能相媲美。
而交流电动机尤其是鼠笼异步电动机由于其自身结构和运行特性的优点,使得交流电动机调速系统的优势强于直流电动机调速系统。
在交流电动机控制技术中调压调频控制、矢量控制以及直接转矩控制(Direct Torque Control简称DTC)具有代表性。
其中应用直接转矩控制技术是一种高性能的控制调速技术,直接转矩控制对交流传动来说是一种最优的电动机控制技术,它可以对所有交流电动机的核心变量进行直接控制。
第1章绪论异步电动机调速系统的发展状况在异步电动机调速系统中变频调速技术是目前应用最广泛的调速技术,也是最有希望取代直流调速的调速方式。
就变频调速而言,其形式也有很多。
传统的变频调速方式是采用v/f控制。
这种方式控制结构简单,但由于它是基于电动机的稳态方程实现的,系统的动态响应指标较差,还无法完全取代直流调速系统。
1971年,德国学者EBlaschke提出了交流电动机的磁场定向矢量控制理论,标志着交流调速理论有了重大突破。
所谓矢量控制,就是交流电动机模拟成直流电动机来控制,通过坐标变换来实现电动机定子电流的励磁分量和转矩分量的解藕,然后分别独立调节,从而获得高性能的转矩特性和转速响应特性。
矢量控制主要有两种方式:磁场定向矢量控制和转差频率矢量控制。
无论采用哪种方式,转子磁链的准确检测是实现矢量控制的关键,直接关系到矢量控制系统性能的好坏。
一般地,转子磁链检测可以采用直接法或间接法来实现。
直接法就是通过在电动机内部埋设感应线圈以检测电动机的磁链,这种方式会使简单的交流电动机结构复杂化,降低了系统的可靠性,磁链的检测精度也不能得到长期的保证。
因此,间接法是实际应用中实现转子磁链检测的常用方法。
三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM 逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
异步电动机直接转矩控制系统仿真对比研究卢秉娟,黄会营,姬宣德(洛阳理工学院电气工程与自动化系,河南洛阳471023)摘要:在详细分析异步电动机传统直接转矩控制(BASIC-DTC)系统和空间矢量调制直接转矩控制(S VM-DTC)系统的基础上,本文利用MATLAB仿真平台分别建立了异步电动机BASIC-DTC系统仿真模型和SVM-DTC系统仿真模型,并对两种仿真模型进行了对比仿真。
仿真结果表明:与异步电动机BASIC-DTC系统相比,异步电动机SVM-DTC系统有效地抑制了转矩和磁链脉动,克服了开关频率不固定的缺陷,同时获得了与BASIC-DTC系统一样的动态响应。
关键词:交流调速系统;传统直接转矩控制;空间矢量调制直接转矩控制;系统仿真中图分类号:TM343 文献标识码:AComparative Study of Induction Motor Direct Torque Control System SimulationLU Bing-juan, HUANG Hui-ying, JI Xuan-de(Department of Electrical Engineering and Automation Luoyang Institute of Science and Technology ,Luoyang HeNan 471023, China)ABSTRACT:On the basis of analyzing in detail the Induction Motor BASIC-DTC System and SVM-DTC System, the BASIC-DTC System simulation model and SVM-DTC System simulation model were established with MATLAB simulation platform In this paper, and two kinds of simulation model were comparably simulated. Simulation results showed that Compared with the BASIC-DTC System, the SVM-DTC System makes the torque and flux ripple reduced, and overcomes the disadvantages of Non-constant switching frequency, and the same dynamic response is also acquired as the BASIC-DTC. KEYWORDS:AC Drive System; BASIC-DTC; SVM-DTC; System Simulation基金项目:河南省教育厅自然科学研究计划项目(2010B470009)1 引言异步电动机直接转矩控制技术是继异步电动机矢量控制技术之后又一高性能的电动机控制方法,它很大程度上解决了矢量控制算法复杂、控制性能易受电机转子参数变化影响等缺点,为感应电动机的高性能控制开辟了崭新方向。
1设计总体思路1.1主电路的设计直接转矩控制系统简称DTC (Di rect torque controI) 系统,是继矢量控制系统之后发展起来的另一种高动态性能的交流电动机变压变频调速系统。
在他的转速环里面,利用转矩反馈直接控制电动机的电磁转矩,因而得名。
直接转矩控制系统的基本思想是根据定子磁链幅值偏差△/的正负符号和电磁转矩偏差口的正负符号,再根据当前定子磁链的矢量必所在的位置,直接选取合适的电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩与定子磁链的控制。
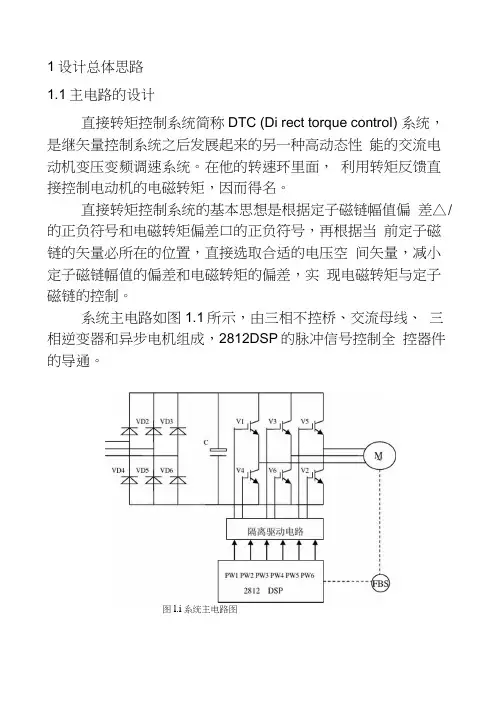
系统主电路如图1.1所示,由三相不控桥、交流母线、三相逆变器和异步电机组成,2812DSP的脉冲信号控制全控器件的导通。
图l.i系统主电路图1.2基本原理直接转矩控制系统的原理结构如图1・2示,途中的APR 和ATR 分别为定子磁链调 节器和转矩调节器,两者均采用带有滞环的双位式控制器,他们的输出分别为定子磁链 幅值偏差△匕的符号函数sgn(^)和电磁转矩偏差7;的符号函数sgn(AT r ),如图1.2所示。
图中,定子磁链给定応与实际转速。
有关,在额定转速以下,保持恒定,在额定转 速以上,応随着。
的增加而减小。
P/N 为给定转矩极性鉴别器,当渴望的电磁转矩为正 时,P/N=l,当渴望的电磁转矩为负时,P/N=O,对于不同的电磁转矩期望值,同样符号 函数sgn(A7;.)的控制效果是不同的。
图1.2制系统原理结构图 - 1 ,sgn(A7; )sgn( △/)图1.2带有滞环的双位式控制器 当渴望的电磁转矩为正,即P /N =I 时,若电磁转矩偏差AT=r ;-r>o,其符号函数co— PW M 控Sgn(A^v ) ------------------------ sgn«) sgn(A7;) ATRI ---------- B . A^RP/N ASR 转矩计算 电压 矢量 选择 3/2变换vrrsgn(A7;)=l,应使定子磁场正向旋转,使实际转矩7;加大:若电磁转矩偏差厶T. = T ;-T e < 0, sgn(A7;.)=0,一般采用定子磁场停止转动,使电磁转矩减小。
基于MATLAB/Simulink的异步电机直接转矩控制研究方法丄I o引言直接转矩控制<DTC )技术是继矢量控制技术之后发展起来的一种新型变频调速技术,于20世纪80年代由德国学者M. Depenbrock和日本学者I. Takahashi首先针对异步电动机提出,90年代由Zhong. L, Rahman M F, Hu Y W 等学者提出永磁同步电动机直接转矩控制理论。
它采用空间矢量分析的方法,直接在定子坐标系下计算并控制交流电动机的转矩和磁链,采用定子磁场定向,借助于离散的两点式控制(Band-Band控制>产生脉宽信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
DTC具备控制结构简单、转矩动态响应迅速、对电动机参数依赖少、对电动机参数变化鲁棒性好等优点。
目前广泛应用于异步电动机、永磁同步电动机中,在家用电器、汽车工业、电力机车牵引等工业生产中发挥着巨大的作用。
本文分析三相异步电机的数学模型的基础上,介绍了三相异步电动机直接转矩控制系统的控制原理,基于MATLAB/Simuli nk仿真平台建立三相异步电动机直接转矩控制系统的整体仿真模型以及该系统各组成的仿真模型。
仿真结果表明,该控制方法可以有效地实现电机转速的快速跟踪,该系统具有较高的动、静态性能,有效地减小了电动机磁链、转矩的脉动,改善了交流调速系统的稳态性能。
1.异步电动机的数学模型异步电机是一个高阶次、非线性、强耦合的多变量系统,因此对异步电机的数学模型进行分析时,通常作以下假设:<1)忽略空间谐波,假设三相绕组对称,产生的气隙磁场按正弦分布。
<2)忽略磁路饱和现象。
<3 )不计铁心损耗。
<4)不考虑频率和温度变化对绕组的影响。
采用空间矢量分析法,在正交定子坐标系上描述异步电机。
电机在定子坐标系上的数学模型由电压方程、磁链方程、转矩方程以及运动方程组成。
电压方程为:at(1-1>(1-2) 电磁转矩方程为:<1-1)运幼方程为:*式#乓为定子电惑厶为转子电虧匚为互感;R:为定子电阻]&为转子电10;©为转子甬速度;Z为电磁转矩匚兀为负载转無J为转动惯量『与为电机极对埶比船叫刖%,和赳护分别为定子、转子在圧轴和0轴的电压矢量;Q和知'■和L分别为定子、转于在口轴和0轴的电流分量,化口和楚护已加」分别为定子、转子在◎軸和0轴的磁链分量° "2异步电动机直接转矩控制VDTC )原理直接转矩控制(DTC>方法采用空间矢量分析方法直接在定子静止坐标系中分析交流电动机的数学模型,构建转矩和磁链的算法模型,计算和控制交流电机的转矩,借助于滞环控制器<Bang-Bang控制)产生PWM信号,通过开关表直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
目录摘要 (I)1 设计总体思路 (1)1.1主电路的设计 (1)1.2 基本原理 (1)2 单元电路设计 (3)2.1 直接转矩控制系统模型 (3)2.2 转速控制器 (4)2.3 直接转矩控制器 (4)2.4 转矩和定子磁链的计算 (5)2.5 磁通和转矩滞环控制器 (6)2.6 磁链选择器 (6)2.7 开关表 (7)2.8 开关控制模块 (8)3 实验仿真、实验波形记录及分析 (9)4 总结 (12)5 附录 (13)参考文献 (14)1 设计总体思路1.1主电路的设计直接转矩控制系统简称DTC(Direct torque control)系统,是继矢量控制系统之后发展起来的另一种高动态性能的交流电动机变压变频调速系统。
在他的转速环里面,利用转矩反馈直接控制电动机的电磁转矩,因而得名。
直接转矩控制系统的基本思想是根据定子磁链幅值偏差s ψ∆的正负符号和电磁转矩偏差e T ∆的正负符号,再根据当前定子磁链的矢量s ψ所在的位置,直接选取合适的电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩与定子磁链的控制。
系统主电路如图1.1所示,由三相不控桥、交流母线、三相逆变器和异步电机组成,2812DSP 的脉冲信号控制全控器件的导通。
图1.1 系统主电路图1.2 基本原理直接转矩控制系统的原理结构如图1.2示,途中的A R ψ和ATR 分别为定子磁链调节器和转矩调节器,两者均采用带有滞环的双位式控制器,他们的输出分别为定子磁链幅值偏差s ψ∆的符号函数sgn(s ψ)和电磁转矩偏差e T 的符号函数sgn(e T ∆),如图1.2所示。
图中,定子磁链给定*s ψ与实际转速ω有关,在额定转速以下,e T ∆保持恒定,在额定转速以上,*s ψ随着ω的增加而减小。
P/N 为给定转矩极性鉴别器,当渴望的电磁转矩为正时,P/N=1,当渴望的电磁转矩为负时,P/N=0,对于不同的电磁转矩期望值,同样符号函数sgn(e T ∆)的控制效果是不同的。
邵阳学院课程设计(论文)任务书年级专业学生姓名学号题目名称三相异步电动机直接转矩控制(DTC)系统仿真设计时间2011年6月20日-2011年7月1日课程名称运动控制系统课程编号121203204 设计地点电力电子与电力拖动实验室/综合仿真实验室一、课程设计(论文)目的课程设计是在校学生素质教育的重要环节,是理论与实践相结合的桥梁和纽带。
运动控制系统课程设计,要求学生更多实践方案,解决目前学生课程设计过程中普遍存在的缺乏动手能力的现象. 《运动控制系统课程设计》是继《电机与拖动基础》和《运动控制系统》课程之后开出的实践环节课程,其目的和任务是训练学生综合运用已学课程的基本知识,独立进行电机调速技术和设计工作,掌握系统设计、调试和应用电路设计、分析及调试检测。
二、已知技术参数和条件异步电动机的参数:380V,60Hz,2对极,Rs=0.435欧,Lls=0.002mH,Rr=0.816欧,Llr=0.02mH,Lm=0.069mH,J=0.19kg.m2,逆变器直流电源510V,Ls=0.71mH,Lr=0.071mH,Tr=0.87三、任务和要求1. 完成主电路的参数设置和仿真2. 完成开关控制模块的仿真3. 控制策略采用直接转矩控制,结合主电路完成系统仿真。
4. 频率变化范围1-50Hz注:1.此表由指导教师填写,经系、教研室审批,指导教师、学生签字后生效;2.此表1式3份,学生、指导教师、教研室各1份。
四、参考资料和现有基础条件(包括实验室、主要仪器设备等)1、电力电子与电力拖动实验室,4套DJDK-1电力电子与电力拖动实验装置;2、DJDK-1电力电子与电力拖动实验指导书;3. Matlab/Simulink仿真软件五、进度安排2011年6月20日-21日:收集和课程设计有关的资料,熟悉课题任务和要求2011年6月22日-23日:总体方案设计及主电路的仿真2011年6月24日-27日:各单元模块的仿真2011年6月28日-30日:整理并书写设计说明书2011年7月1日:答辩并考核六、教研室审批意见教研室主任(签字):年月日七|、主管教学主任意见主管主任(签字):年月日八、备注指导教师(签字):学生(签字):目录摘要 (3)一异步电机DTC基本原理分析 (4)1.1 异步电机数学模型 (4)1.2 DTC控制系统基本思想 (4)1.3 DTC按定子磁链控制模型 (5)1.4 定子电压矢量控制 (7)二单元电路设计 (10)2.1 DTC模型 (10)2.2 转速控制器 (10)2.4 转矩和定子磁链计算 (11)2.5 磁通和转矩滞环控制器 (12)2.7 开关表 (13)2.8 开关控制模块 (15)2.9 矩阵变频器 (15)三实验仿真 (16)3.1 仿真模型及说明 (16)总结与体会 (19)附录 (20)参考文献 (21)摘要直接转矩控制是近些年来备受关注的一种异步电机控制方法,是高性能调速系统中最为常见的方法之一。
异步电动机直接转矩控制系统的MATLAB仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电动机直接转矩控制系统(Direct Torque Control, DTC)已成为电动机控制领域的重要研究方向。
该控制系统以其快速响应、高鲁棒性和简单的结构特性,在电力驱动、工业自动化、新能源汽车等领域具有广泛的应用前景。
本文旨在通过MATLAB仿真平台,对异步电动机直接转矩控制系统进行深入研究和探讨。
本文将首先介绍异步电动机直接转矩控制的基本原理和主要特点,包括其与传统矢量控制方法的区别和优势。
随后,将详细阐述异步电动机的数学模型,以及DTC系统中转矩和磁链的控制策略。
在此基础上,利用MATLAB/Simulink仿真软件,构建异步电动机DTC系统的仿真模型,并对仿真模型中的关键参数和模块进行详细设计。
本文的重点在于通过仿真实验,分析异步电动机DTC系统的动态性能和稳态性能,探讨不同控制参数对系统性能的影响。
将针对仿真结果中出现的问题和不足,提出相应的改进措施和优化策略,以提高DTC系统的控制精度和稳定性。
本文将对异步电动机直接转矩控制系统的未来发展趋势和应用前景进行展望,为相关领域的研究人员和工程师提供参考和借鉴。
二、异步电动机直接转矩控制系统理论基础异步电动机直接转矩控制系统(Direct Torque Control, DTC)是一种高效的电机控制策略,旨在直接控制电机的转矩和磁链,从而实现快速动态响应和优良的控制性能。
与传统的矢量控制相比,DTC具有算法简单、易于数字化实现、对电机参数变化不敏感等优点。
异步电动机DTC系统的理论基础主要建立在电机转矩和磁链的直接控制上。
在DTC中,通过检测电机的定子电压和电流,利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)或滞环比较器(Hysteresis Comparator)等控制手段,直接计算出所需的电压矢量,以实现对转矩和磁链的快速调节。
异步电机直接转矩控制系统的仿真研究的开题报告一、选题背景异步电机是一种广泛应用于工业制造、交通运输等领域的电机类型,其主要特点是转子和定子的工作原理不同,使得其具有体积小、结构简单、使用方便等优点。
目前,随着工业制造技术的不断发展,对异步电机的性能要求也越来越高,特别是对转矩控制精度和响应速度等方面的要求,这就需要对异步电机控制系统进行研究和优化。
因此,本次研究选取异步电机直接转矩控制系统作为研究对象,通过仿真方法对其进行分析和设计,进一步提高其响应速度和控制精度,为工业制造等领域的异步电机应用提供参考。
二、研究内容和目的研究内容:以Matlab/Simulink软件为平台,建立异步电机直接转矩控制系统的仿真模型,包括电机模型、转矩控制模型、调节器模型等部分,通过仿真实验对其控制性能进行分析和评估。
研究目的:通过对异步电机直接转矩控制系统进行仿真分析,可以深入理解其工作原理和参数对其控制性能的影响,为改进异步电机控制系统提供参考,优化控制策略,提高其控制精度和运行稳定性。
三、研究步骤1. 建立异步电机模型:根据异步电机的工作原理,建立其数学模型,包括电动机模型、电机电流模型、电机转子模型等部分。
2. 设计转矩控制模型:建立控制系统的数学模型,确定控制器的结构和参数,采用直接转矩控制策略,实现对电机的控制。
3. 设计调节器模型:建立PI调节器模型,用于控制器输出转矩值,使其达到预定目标值。
4. 建立仿真模型:将电机模型、转矩控制模型和调节器模型等部分进行整合,建立仿真模型,对控制系统进行仿真分析。
5. 仿真实验和分析:通过对仿真模型的参数调整和仿真实验,对控制系统的性能进行评估和分析,包括控制精度、响应速度、稳定性等方面。
四、预期成果通过本研究,可以建立异步电机直接转矩控制系统的仿真模型,深入研究其控制策略和控制性能,进一步提高其响应速度和控制精度,并为工业制造等领域的异步电机应用提供参考。
直接转矩控制系统仿真实验田望同(江南大学物联网工程学院,江苏省无锡市)摘要:随着电力电子及数字信号处理技术的进步,变频调速技术得到了飞速的发展。
直接转矩控制技术是继矢量控制技术之后发展起来的一种新型、高性能技术。
与矢量控制相比较,省去了复杂的矢量变化、克服了矢量控制系统对电机转子参数的依赖性等缺点,具有转矩响应快、控制结构简单、易于实现全数字化的特点。
本文介绍了异步电机直接转矩控制的基本原理和系统的基本构成,在此基础上,通过Matlab/Simulink建立了各个模块的仿真模型,构建了直接转矩控制仿真系统,对直接转矩控制方法的特点及其存在的问题进行了仿真分析研究,验证了直接转矩控制系统的可行性.关键词:直接转矩控制;异步电机;Matlab/Simulink仿真Simulationexperiment ofdirect torque controlsystemTianwangtong(Jiangnan University,School of Internet of Things Engineering)As the electric electronic and digital signal processor technologyprogresses,the adjustable—speed technology with variable frequency has a rapidlydevelopment.The Direct Torque (DTC)followingV ector Control is a new typeand high performance technology.Compare with V ector Control Which has complicatedcoordinate transformation and strong dependency of rotor parameters,the DTCtechnique of induction motors is known to have a simple control structure、fast torqueresponses and easy to implement.The basic principle and structure of DTC have been introduced,on this ground,UsingMatlab/Simulink build the simulation models which form the whole DTC simulationsystem.Then,DTC method prove to be of feasibility according to study and analyze thecharacteristic of the simulation system..Keywords:Direct torque control; Induction motor ;Matlab/Simulink1引言(Introduction)直接转矩控制变频调速技术是用空间矢量分析方法,在二相静止坐标系下计算、控制异步电动机的磁链和转矩,采用两点式调节产生<=.信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
现代电力传动及其自动化—课程作业异步电动机直接转矩控制系统仿真1、直接转矩控制系统的基本思想直接转矩控制系统简称 DTC ( Direct Torque Control) 系统,在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,因而得名。
直接转矩控制是标量控制。
它借助于逆变器提供的电压空间矢量,直接对异步电动机的转矩和定子磁链进行二位控制,也称为砰-砰(bang-bang )控制。
三相异步电动机电磁转矩表达式为:))()((m e t t K T r s ΨΨ⨯=)(sin m t K r s θψψ= (1.1)r s ψψ、分别为定子、转子磁链的模值,)(t θ为定子、转子磁链之间的夹角,称为磁通角。
对式(1.1)分析,电磁转矩决定于定子磁链和转子磁链的矢量积,即决定于两种幅值和其间的空间电角度。
若r s ψψ、 是常数,改变转矩角可改变转矩。
而且Ψr 的变化总是滞后于Ψs 的变化。
但是在动态过程中,由于控制的响应时间比转子的时间常数小得多,在短暂的过程中,就可以认为Ψr 不变。
可见只要通过控制保持Ψs 的幅值不变,就可以通过调节转矩角来改变和控制电磁转矩,这是直接转矩控制的基本原理。
图1.1 直接转矩控制系统原理图ω在定子两相静止坐标系下,根据磁链给定值与异步电机的实际磁链观测值相比较得到磁链误差,进而确定磁链的调节方向,根据给定的电磁转矩值与异步电机的实际电磁转矩观测值相比较得到转矩误差,进而确定转矩的调节方向,然后根据定子磁链信号、转矩信号以及定子磁链所在位置确定选择合适的电压空间矢量,从而确定三相电压源逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩值。
由图1.1得直接转矩控制系统仿真结构框图,如图1.2所示。
图1.2 直接转矩控制系统仿真结构框图2、单元模块说明2.1 定子电压与定子电流的三二变换三相/两相变换矩阵如式(2.1),其仿真结构框图如图2.1所示。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=2323212113223c(2.1)图2.1 三相/两相变换矩阵仿真结构框图2.2 磁链估算模型经计算得定子磁链计算公式为(2.2)(2.3)(2.4),结构框图如图2.2、2.3所示。
一、绪论1、电机调速技术的发展概况电动机作为把电能转换为机械能的主要设备,在工农业生产、国防、科技及社会生活等各个领域发挥着重要的作用。
根据采用电流制式不同,电动机分为直流电动机和交流电动机两大类。
历史上最早出现的是直流电动机,并且由于直流电动机转速的调节性能和转矩的控制性能比较理想,直流传动系统一直在变速传动系统中占主导地位。
但是由于直流电动机本身结构上具有的机械换向器和电刷而使这种传动存在如下缺点:①、直流电机的机械换向器由很多铜片组成,铜片之间有云母片隔离绝缘,因此制造工艺复杂,费时费料,增加了直流电机的成本。
②、换向器的换向能力限制了直流电机的容量和速度。
③、电刷火花和环火限制了直流电机的安装环境,易燃、易爆、多尘以及环境恶劣的地方不能使用直流电机。
④、直流电机的大部分功率(除励磁以外)都是通过换向器流入电枢的,转子发热多,电机效率低。
⑤、换向器和电刷易于磨损,需要经常更换。
这样就降低了系统的可靠性,增加了维修和保养的工作量。
虽然存在以上的缺点,但是在19世纪80年代以前直流传动是唯一的传动方式。
1885年随着交流鼠笼型异步电动机问世,虽然控制比较复杂,但其结构简单、成本低、安装环境要求低,适于易燃、易爆、多尘的条件。
尤其是在大容量、高转速应用领域,备受人们青睐。
改变异步电动机转速有以下三种方法:①、改变电机本身的参数,极对数来调速,由于制造工艺和本身结构所限一般情况下只有两三种极对数变换,不能做到连续的调速,调速范围有限。
②、改变定子电压(改变电源电压或定子串阻抗),或绕线型电动机转子串电阻,或带转差离合器地异步电机调节励磁电流都可实现变转差率调速。
但是电机地损耗与转差率s成比例地增大,效率随转速的降低而讲的,山于电机在高转差低转速卜运行特性恶化,使实际可行地调速范围受到限制。
③、连续地改变电源频率,虽然可以十分理想地实现交流电动机地无级调速,但这要有一套变频电源,在60年代大功率半导体变频装置问世之前,代价很大。
直接转矩控制的基本原理和仿真研究摘要:直接转矩控制技术是继矢量控制技术之后,在交流传动领域内发展迅速的一种高性能调速技术,该控制方法以其思路新颖、结构简单及性能良好等优点引起了广泛关注和研究。
与矢量控制技术不同,直接转矩控制技术采用定子磁场定向,直接将磁通和电磁转矩作为控制量,对电磁转矩的控制更加简捷快速,提高了系统的动态响应能力。
由于直接转矩控制技术本身的固有优势,使直接转矩控制的理论研究和技术开发越来越受到重视,进展的步伐也越来越快。
本文将直接转矩控制技术应用于异步电机中,从异步电机的数学模型岀发,介绍了直接转矩控制技术的基本理论。
在深入剖析原理的基础上将直接转矩算法模块化,在Simulink环境下建立了异步电机直接转矩近似圆形磁链控制系统仿真模型。
仿真结果表明,直接转矩控制技术动态响应能力快,控制方法直接,但是低速性能较差,低速状态下存在转矩脉动过大,定子电流畸变严重等缺点。
关键字:直接转矩控制,异步电机,simulinkThe Basic Principle and Simulation Study of DirectTorque ControlKong Fei,Ye Zhe n, Shao Zhuyu<Jiangnan University, Wuxi, Jiangsu, 214000, P. R. China )Abstract: Direct Torque Control (DTC> technology is a high-speed technology in the field of AC drive following the technique ofvector control and it has rapid development in recent years.This control strategy attracts wide attention and research for its novel idea, simple structure and good performance. Differ from the vector control technologies, DTC technology uses the stator flux orientation and directly makes the flux and electromagnetic torque as the control volume, therefore the control of the electromagnetic torque is simple and fast, the system dynamic response capability is improved. Due to the inherent advantages of DTC technology, its theoretical research and technological development is receiving increasing attention, also the pace of progress faster and faster.In this article, we make direct torque control techniques applied to asynchronous motors. From a mathematical model of induction motor starting, introduced the basic theory of DTC technology. Based on depth analysis of the basis and principles, we module the DTC algorithm. In the Simulink environment, the asynchronous motor direct torque control system of quasi-circular flux simulation model is established. Simulation results show that the DTC technologies has fast dynamic response capability and directly control method, but the low-speed performance is poor, such as torque ripple is too large in low speed state and the stator current distortion is serious. Key words:direct torque control (DTC>,asynchronous motor,simulink1前言直接转矩控制技术作为一种新颖的电机控制策略,基本思想就是直接将电磁转矩作为被控制量,与矢量控制相比,无需进行复杂的坐标变换,对电机的控制更加快捷迅速,控制系统的动态响应能力得到进一步提高。
1 引言 ........................................................................................................ 错误!未定义书签。
2 三相交流异步电机的数学模型 (3)2.1 基本方程式的建立 (3)2.2 坐标变换理论基础 (4)2.3 动态方程的建立 (5)3 三相异步电动机的常规调速及仿真分析 (7)3.1 变极调速 (7)3.2 变转差率调速 (8)3.2.1 串电阻调速 (8)3.2.2 串极调速 (10)3.3 变频调速 (11)3.3.1 变频调速的机械特性 (12)3.3.2 基频以下变频调速 (12)3.3.3 基频以上变频调速 (13)3.4 SIMULINK仿真模型 (14)3.5 变极调速的仿真 (16)3.6 变压调速 (17)3.7 变频调速 (19)3.7.1 未变频时仿真结果 (19)3.7.2 变频时仿真结果(基频以下调速) (19)3.7.3 变频时仿真结果(基频以上调速) (20)3.8 关于变频调速的总结 (20)4 直接转矩控制调速 (22)4.1逆变器以及基本空间矢量的概念和原理 (22)4.2直接转矩的控制原理 (24)4.2.1 定子磁链、转矩和扇区的计算 (25)4.2.2 基本电压空间矢量对定子磁链矢量和电磁转矩的影响 (26)4.2.3定子磁链和电磁转矩的控制 (27)4.3直接转矩控制的仿真和性能分析 (29)4.3.1直接转矩控制系统的Matlab/Simulink仿真 (29)4.3.2直接转矩控制系统的性能分析 (31)1 三相交流异步电机的数学模型异步电动机的动态数学模型由磁链方程 、电压方程 、转矩方程和运动方程组成。
磁链方程和转矩方程为代数方程 ,电压方程和运动方程为微分方程,这是一个高阶、非线性、强耦合的多变量系统。
1.1 基本方程式的建立异步电动机每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和。
三相异步电动机直接转矩控制系统仿真报告 Document number:PBGCG-0857-BTDO-0089-PTT1998三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
2 三相异步电机的直接转矩控制系统组成三相异步电动机直接转矩控制系统模块图标如图1所示,其仿真模型如图2所示,模型由7个主要模块组成:三相不控整流器(Three-phase diode rectifier)、Braking chopper、三相逆变器(Three-phase inverter)、测量单元(Measures)、异步电动机模块(Induction machine)组成系统的主要电路;转速控制器(Speed Controller)和直接转矩控制模块DTC,其中主电路模块和转速控制模块结构基本与磁场定向矢量控制系统相同。
图1 直接转矩控制系统图标直接转矩控制DTC模块结构图如图2所示,转矩给定Torque*、磁通给定Flux*、电流I_ab和电压V_abc输入信号都经过采样开关,DTC模块包括转矩和磁通计算、滞环控制、磁通选择、开关表、开关控制等单元。
DTC模块输出时三相逆变器Three-phase inverter开关器件的驱动信号。
直接转矩控制系统采用6个开关器件组成的桥式三相逆变器,该逆变器有8种开关状态,可以得到6个互差60°的电压空间矢量和两个零矢量。
交流电机定子磁链Ψs受电压空间矢量us控制Ψs?∫usdt,因此改变逆变器开关状态可以控制定子磁链Ψs的运行轨迹,从而控制交流电机的运行。
图2 直接转矩控制系统模型结构图3 直接转矩控制模块结构3 转矩和定子磁链计算转矩和定子磁链计算(单元结构如图4所示,它首先将检测到的异步电动机三相电压V_abc和电流I_AB 经模块dq_V_transform和dq_I_transform边换,得到二相坐标系(αβ)上的电压和电流,dq_V_transform和dq_I_transform变换模块结构如图5所示。
图4 转矩和定子磁链计算单元结构定子磁链计算定子磁链的模拟和离散计算式为()s s s s tu R i dαβαβαβψ=-⎰ (3-1)(z1)()2(z1)ss s s sKTu R iαβαβαβ+ψ=-+(3-2)式中,suαβ和siαβ为αβ两相坐标系上的定子电压和电流,K为积分系数,sT为采样时间。
磁链计算采用离散梯形积分,模块phi_d和phi_q分别输出定子磁链的α和β轴分量s αψ和s βψ,s αψ和s βψ经Real_Imag to Compels 模块得到复数形式表示的磁链s ψ,并由Compels to Magnitude_Angle 计算定子磁链s ψ的幅值和转角。
转矩计算电动机转矩计算式为3()2e s s s s T p i i βααβ=ψ-ψ (3-3)式中,p 为电动机极对数。
图5 abc/αβ坐标系变换模块结构4 模块结构磁通和转矩滞环控制器电动机的转矩和磁链都采用滞环控制,磁通和转矩滞环控制器(Flux &Torque hysteresis )结构如图6所示。
转矩控制史三位滞环控制方式,在转矩滞环宽度设为dTe 是,当转矩偏差*(T T )2e e e dT ->+和*(T T )2ee e dT -<-时,滞环模块/2e dT 和/2e dT -分别输出状态“1”和“3”,当滞环模块/2e dT 和/2e dT -输出为“0”时,经或非门NOR 输出状态为“2”。
磁链控制是二位滞环控制方式,在磁链滞环宽度设为d Ψ是,当磁链偏差*()2e e d ψψ-ψ>+和*()2e e d ψψ-ψ<-时,模块dPhi 分别输出状态“1”和“2”。
磁链选择器直接转矩控制将磁链空间划分为6个区间,磁链选择模块s ψ的位置角ϕ,判断磁链s ψ运行在哪一个分区。
磁链选择器结构如图7所示,模块输入时磁链计算模块输出的磁链位置角angle ,通过计较和逻辑运算输出磁链所在的分区编号。
图6 Flux &Torque hysteresis 模块图7 磁链选择器模块结构开关表表1 Lookup Table 表格图8 switching table开关表开关表(switching table)(如图8)用于得到三相逆变器6个开关器件的通断状态,它由两张Lookup Table表格(Flux=1和Flux=-1)和三个多路选择器组成。
两张Lookup Table表格对应的输出见表1.表格输出加1后通过选择开关2(Multiport Switch2)输出对应的6个开关器件的8种开关状态V0~V7,其中包含了两种零状态V0和V7。
开关表中,Magnetisation模块结构如图9所示,其作用是将磁链反馈值与设定值比较,当反馈值大于设定值时,S-R flip-flop触发器Q端输出“1”,当反馈值小于设定值时,S-R flip-flop触发器Q端输出“0”,从而控制电动机启动时逆变器和转速调节器工作状态,使电动机启动时产生初始磁通。
图9 Magnetisation模块开关控制模块开关控制模块(如图10)包含了三个D触发器,目的是限制逆变器开关的切换频率,并且确保逆变器每相上下两个开关处于相反的工作状态,开关的切换频率可以在模块的对话框中设置。
图10开关控制模块5 仿真结果图11 直接转矩控制系统仿真模型异步电动机直接转矩控制系统仿真模型如图11所示,系统由三相交流电源、直接转矩控制系统模块和检测单元等模块组成。
三相电源线电压360V、60HZ,电源内阻Ω,电感。
电动机额定参数:149kW、360V、60HZ,系统由转速和转矩两项输入,在调速的同时负载转矩也在发生变化。
转速和转矩给定实用离散控制模型库Discrete Control Drive中的timer模块,Speed reference设定值为:t=0s、1s时转速分别为500 r/min、0r/min。
Torque reference设定值为:t=0、、时转矩分别为0 N*m、792 N*m、-792N*m。
模型采用混合步长的离散算法,基本采样时间Ts=μs,转速调节器采用时间为μs 。
仿真得到的结果如图13所示。
a)转速响应b)a相定子电流c)电磁转矩图13 仿真结果从仿真波形可以看到在t=0s时,转速按设定的上升率(900r/min/s)平稳升高,在启动时达到设定的转速500r/min。
在0~范围内电动机是空载启动,电动机电流为200A(幅值);时加载792T,电流上升为400A(幅值),加载时电磁转矩瞬时达到1200N*m,但是在系统的控制下,加载对转速的上升和稳定运行没有明显影响。
1s后电动机开始减速,定子电流减小,并且电流频率下降。
在t=时转速下降为0,这时转矩给定从792 N*m 变化为-792 N*m ,转速仍稳定为0r/min,表明系统有很好的转矩和速度响应能力。
6 小结直接转矩控制系统利用MATLAB /Simulink这一优良仿真工具可以方便地模拟异步电机磁链轨迹、电阻电压、电流、转速(角速度)以及电磁转矩等参数的情况。
通过仿真可以看出,直接转矩控制系统具有动态响应速度快、稳态精度高、结构简单、易于实现等优点。
通过建模的方式仿真研究电气传动系统对于控制系统的数字化实现具有重要意义和实用价值。