ABB配置文件
- 格式:docx
- 大小:16.00 KB
- 文档页数:2
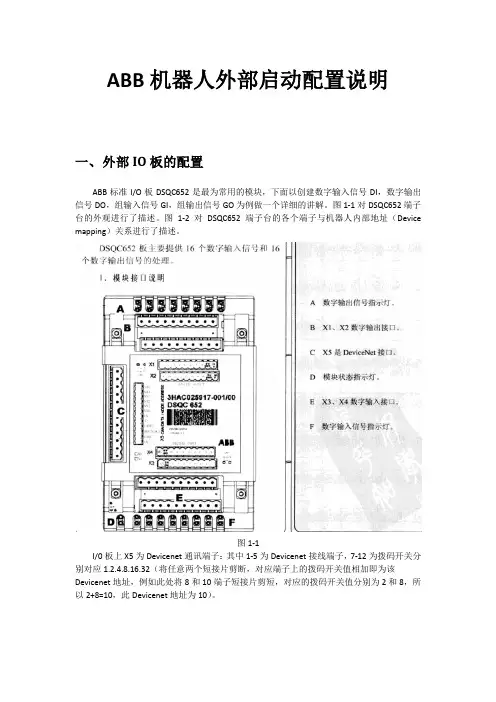
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
一、ABB 机器人信号配置简介ABB 机器人信号配置是指对机器人进行信号连接和配置,使其能够正常地接收和发送信号,实现与外部设备的联动和控制。
信号配置是机器人应用中的重要环节,直接影响到机器人的工作效率和精度。
二、ABB 机器人信号配置的基本步骤1. 准备工作在进行信号配置之前,首先要准备好相应的设备和工具,包括计算机、ABB 机器人控制器、连接线等。
2. 连接设备将计算机与ABB 机器人控制器进行连接,确保二者能够正常通信和传输数据。
3. 打开配置工具启动ABB 机器人信号配置的软件工具,通过该工具可以对机器人进行信号配置和调试。
4. 选择信号类型根据实际需求,选择需要配置的信号类型,如数字输入信号、数字输出信号、模拟输入信号、模拟输出信号等。
5. 配置信号参数在配置工具中,设置相应的信号参数,包括信号名称、信号类型、信号触发条件、信号响应动作等。
6. 联动设备根据配置的信号参数,将机器人与外部设备进行联动,并进行相应的调试和测试,确保信号配置的准确性和稳定性。
7. 保存配置完成信号配置后,及时保存配置文件,以便日后的参考和修改。
三、ABB 机器人信号配置的注意事项1. 确认设备联接正确在进行信号配置之前,要确保设备之间的连接是正确的,避免由于连接错误导致的信号配置异常。
2. 注意信号参数设置在配置信号参数时,要根据实际需求和设备特性进行合理设置,避免出现信号触发不准确或响应异常的情况。
3. 进行充分测试完成信号配置后,要对机器人和外部设备进行充分的联动测试,确保配置的信号能够正常触发和响应。
4. 系统稳定性验证在信号配置完成后,要对整个系统进行稳定性验证,确保配置的信号能够在长时间和高负荷的工作环境下稳定运行。
四、结语ABB 机器人信号配置是机器人应用中不可或缺的一部分,正确的信号配置能够提高机器人的工作效率和精度,实现更加智能化的生产制造。
通过以上步骤和注意事项的介绍,相信读者已经对ABB 机器人信号配置有了一定的了解,希望能够在实际工作中运用这些知识,提升工作效率,改善生产制造的质量和效益。

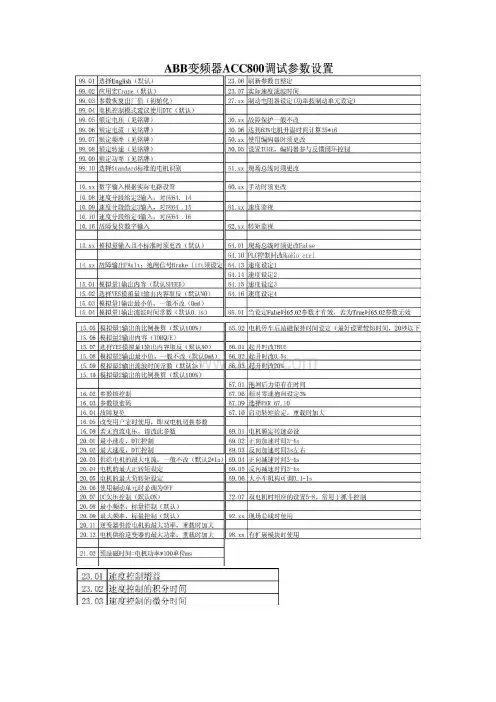
以下是网上的方法:一.PROFIBUS-DP现场总线控制器(如PLC或DCS系统)的设置:第一步:安装ABB变频器GSD文件 ABB_0812.GSD;第二步:在系统PROFIBUS-DP硬件配置的中添加从站ABB Drives RPBA-01 站号为2(或其它地址号),插入PPO Type Module为4;第三步:在2号从站的参数设置中,将Operation Mode改为Vendor Specific (即ABB传动协议);第四步:其它为默认配置;第五步:将配置下载到主站中。
通过以上几步的设置,主站对从站2的输出区(OUTPUT)的数据结构为:Output的第一个字是用于ABB传动通信协议的控制字CW;Output的第二个字是变频器的给定值REF1;Output的第三个字是变频器的给定值REF2;Output的第四个字是变频器的给定值REF3(由ACS800变频器参数90.01决定);Output 的第五个字是变频器的给定值REF4(由ACS800参数90.02决定);Output的第六个字是变频器的给定值REF5(由ACS800参数90.03决定)。
主站对从站2的输入区(INPUT)的数据结构为:Input的第一个字是用于ABB传动通信协议的状态字SW;Input的第二个字是变频器的实际值ACT1(由ACS800参数92.02决定);Input的第三个字是变频器的实际值ACT2(由ACS800参数92.03决定);Input的第四个字是变频器的实际值ACT3(由ACS800参数92.04决定);Input的第五个字是变频器的实际值ACT4(由ACS800参数92.05决定);Input的第六个字是变频器的实际值ACT5(由ACS800参数92.06决定)二.ACS800参数的设置步骤:第一步:将ACS800变频器Profibus适配器模块安装到变频器上;第二步:按照适配器模块的用户手册调整硬件(如站号,终端电阻等)第三步:将参数98.02(Comm.Module Link)改为FIELDBUS;确定参数98.07(C OMM PROFILE)为ABB DRIVES第四步:修改51组参数。

不知道你什么系列的变频器,下面是我给别人的ACS800标准程序的回答,复制给你,看看对你有没有帮助。
欢迎采纳。
一、变频器的简朴本地启动 1.首先确定空开闭合,接触器得电;2.按LOC/REM使变频器为本地控制模式 3.按PAR进入控制盘的参数设置模式用双箭头键选到99参数组,然后用单箭头键选择04,ENTER进入99.04电机传动模式(DTC)DTC变频器设定值为转速(多数情况下用这种模式)SCALA变频器的设定值为频率选择好模式后按ENTER确认(取消按ACT返回)4.按ACT回到当前状态 5.按REF,选择上下调节键,输入指定的参数后,按ENTER确认 6.按启动键,变频器启动至此,完成了一个变频器简单的本地运行过程假如需要将已显示的实际信号替换显示成其他的实际信号,可以按以下步骤进行操作:1.按ACT进入实际信号显示模式;2.选择需要改变的参数行,按ENTER进入;3.按单双箭头键,选择要显示的参数或改变参数组;(常用的几个显示信号:01.02电机的实际转速SPEED01.03传动输入频率的实际值FREQ03.20变频器最后一次故障的代码LAST FLT)4.按ENTER确认并返回实际信号显示模式;(取消直接按ACT)二、上传和下载如何将已经设置好电机需要上传到CDP-312操作面板上:1.激活可选设备的通讯确认98.02COMM.MODULE LINK设定为FIELDBUS98.07 COMM PROFILE设定为ABB DRIVES2.按LOC/REM切换到L本地控制状态;3.按FUNC进入功能模式;4.按单双箭头键进入UPLOAD功能按ENTER执行上传,完成后自动切换到当前信号显示模式;、5.如果要将控制盘从一个传动单元移开前,确认控制盘处于远程控制模式状态(可以按LOC/REM进行改变)如何将数据从控制盘下载到传动单元:1.将存有上传数据的控制盘连接到传动设备;2.确认处于本地控制模式(可以按LOC/REM选择);3.按FUNC进入功能模式;4.进入DOWNLOAD下载功能,按ENTER执行下载。
低压交流传动用户手册ACS510-01 变频器 (1.1...132 kW)2ACS510 用户手册ACS510 变频器手册Industrial IT 标记及Drive IT 产品名称为ABB 公司所持有的注册商标。
CANopen 为 CAN 组织所持有的注册商标。
ControlNet 为 ControlNet 国际组织所持有的注册商标。
DeviceNet 为 Open DeviceNet 供应商协会所持有的注册商标。
DRIVECOM 为 DRIVECOM 用户组织所持有的注册商标。
Interbus 为 Interbus Club 组织所持有的注册商标。
LonWorks 为 Echelon 公司所持有的注册商标。
Metasys 为 Johnson Controls 公司所持有的注册商标。
Modbus 和 Modbus Plus 为施耐德公司所持有的注册商标。
Profibus 为 Profibus 贸易组织所持有的注册商标。
Profibus-DP 为 西门子公司所持有的注册商标。
通用手册ACS510-01 用户手册 (1.1…132 kW)•安全指南•安装•启动•内置现场总线•现场总线适配器•诊断•维护•技术数据可选件手册( 现场总线适配器, I/O 扩展模块等,手册和可选件一起发货 )继电器输出扩展模块•安装•启动•诊断•技术数据© 2007 ABB 版权所有ACS510 用户手册3安全指南警告! 只允许专业技术人员安装 ACS510!警告! 即使电机已经停止, 功率端子 U1, V1, W1和 U2, V2, W2 以及UDC+, UDC-或BRK+ , BRK- 上面依然存在危险电压!警告!主回路电源得电后即存在危险电压。
电源断开后等候5分钟(让中间回路电容充分放电)再打开前面板。
警告!ACS510断电后,在继电器端子上 ( RO1…RO3 )依然可能有外部危险电压。
警告! 当两个或两个以上的变频器的控制端子并联使用时,用于控制连接的辅助电源应来自同一个单元或外部电源。
abb断路器的edz文件ABB断路器是一种常用的电气设备,用于控制和保护电力系统中的电路。
它的edz文件是其特定的文件格式,用于存储和传输有关断路器的相关信息。
本文将以ABB断路器的edz文件为题,从人类的视角来描述它的特点和用途。
ABB断路器的edz文件是一种二进制文件格式,用于存储断路器的参数、功能和特性等信息。
这些信息对于电力系统的正常运行至关重要,可以帮助工程师和技术人员更好地了解和操作断路器。
通过edz文件,用户可以轻松地获取断路器的技术规格、额定电流、断路能力等重要参数,以及断路器的操作手册和安装说明书等相关文档。
ABB断路器的edz文件具有良好的兼容性和易用性。
它可以与各种电气设计软件和系统集成,方便用户进行电气系统的设计、模拟和分析。
通过将edz文件导入设计软件,用户可以直观地查看断路器的电气连接图、工作原理和状态指示,以及其在电力系统中的位置和连接方式。
这为用户提供了便利,使得设计和维护电力系统变得更加高效和可靠。
ABB断路器的edz文件还具有可扩展性和灵活性。
用户可以根据实际需求,自定义断路器的参数和功能,以满足不同的电力系统要求。
通过修改edz文件中的参数值和配置选项,用户可以调整断路器的额定电流、动作时间和保护方式等,以适应不同负载和故障条件下的运行需求。
这为用户提供了灵活性和可定制性,使得断路器能够更好地适应各种电力系统的要求。
ABB断路器的edz文件是一种重要的电气设备文件格式,用于存储和传输断路器的相关信息。
它具有兼容性、易用性、可扩展性和灵活性等优点,为用户提供了便利和灵活性。
通过edz文件,用户可以更好地了解和操作断路器,使得电力系统的设计和维护更加高效和可靠。
无论是工程师还是技术人员,都可以通过使用ABB断路器的edz文件,更好地理解和应用断路器,从而为电力系统的运行和保护作出贡献。
ABBPCM600软件使用方法详解首先,安装ABBPCM600软件。
将光盘插入计算机光驱,打开光盘,运行安装程序。
按照提示一步步进行安装,直到安装完成。
安装完成后,双击桌面上的ABBPCM600图标打开软件。
进入软件后,点击“新建”按钮创建一个新的配置文件。
在配置文件管理界面,点击“新建配置文件”,填写相关信息,点击“保存”。
接下来,选择你想要配置的设备。
点击“新建装置”按钮,在装置属性界面中选择设备类型,填写设备名称等信息,然后点击“保存”。
进入设备配置界面后,我们可以开始配置设备参数。
首先,在设备参数设置界面,选择配置项。
例如,选择“电流变压器配置”,填写电流变压器的参数信息,如变比、额定电压等。
然后点击“保存”。
接下来,在继电器保护配置界面,选择要添加的保护功能,例如过电流保护、距离保护等。
填写相关参数信息,点击保存。
除了配置设备参数外,ABBPCM600软件还具有设置通信参数的功能。
点击“通信配置”按钮,在通信参数设置界面中,选择通信协议、串口参数等,然后点击“保存”。
在配置完成后,点击“导入导出”按钮,可以导入导出配置文件。
点击“导入配置文件”,选择要导入的配置文件,点击“打开”。
然后点击“导出配置文件”,选择要导出的配置文件路径,点击“保存”。
除了配置文件的导入导出外,ABBPCM600软件还具有数据同步的功能。
点击“数据同步”按钮,在数据同步界面中选择要同步的设备,然后点击“同步”。
最后,点击“执行”按钮,将配置文件应用到设备上。
在执行界面中,选择要执行的操作,如读取设置、写入设置等,然后点击“执行”。
配置文件配置文件是列出系统参数值的文本文件。
留意:假如该参数指定默认值,那么就不会被列在配置文件。
限制器中有六个配置区域,配置文件保存为后缀.CFG文件。
配置文件默认保存在系统文件夹SYSPAR,例如.. \ MySystem\ SYSPAR\。
该配置文件包含在备份中。
留意;配置文件,不能被以前的RobotWare系统加载。
配置文件:配置区域描述:SIO.cfg 串行通道和文件传输协议通信。
SYS.cfg 平安和RAPID指定的特定限制器功能。
EIO.cfg I / O板和信号I/ O 。
MMC.cfg 功能,以简化与工作系统人机通讯。
MOC.cfg 机器人和外部轴运动。
PROC.cfg 处理特定的工具和设备。
保存内容备份功能可保存上下文中的全部系统参数、系统模块和程序模块。
备份内容数据保存于用户指定的书目中。
默认路径可加以设置。
书目分为四个子书目:Backinfo、Home、Rapid 和Syspar。
System.xml 也保存于包含用户设置的../backup (根书目)中。
Backinfo Backinfo 包含的文件有backinfo.txt、key.id、program.id 和system.guid、template.guid、keystr.txt。
复原系统时,复原部分将运用backinfo.txt。
该文件必需从未被用户编辑过!文件key.id 和program.id 由RobotStudio Online 用于重新创建系统,该系统将包含与备份系统中相同的选项。
system.guid 用于识别提取备份的独一无二的系统。
system.guid 和/或template.guid 用于在复原过程中检查备份是否加载到正确的系统。
假如system.guid和/ 或template.guid 不匹配,用户将被告知这一状况。
Home HOME 书目中的文件副本。
Rapid 包含每个配置任务的子书目。
可编辑修改精选全文完整版ABB工业机器人-上位机远程加载EIO等配置文件1.EIO 是机器人的外部IO配置文件2.可以通过Robotstudio加载,或者通过示教器加载3.也可以通过上位机直接家在4.上位机先连接上控制器5.需要在代码最上方添加关于ConfigurationDomain的引用using ABB.Robotics.Controllers.ConfigurationDomain;6.创建一个加载按钮7.在对应保存按钮代码处编写private void button8_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = 'configuration files (*.cfg)|*.cfg';ofd.ValidateNames = true;ofd.CheckPathExists = true;ofd.CheckFileExists = true;//打开open对话框string file;if (ofd.ShowDialog() == DialogResult.OK){file = ofd.FileName;controller.Logon(UserInfo.DefaultUser);try{using (Mastership.Request(controller)){controller.Configuration.Load(file, LoadMode.ResetAndAdd);//可以使用全部删除再加载//也可以使用Replace替换重复项}}catch (Exception ex){MessageBox.Show(ex.Message.ToString());}MessageBox.Show('加载EIO成功,需要重启控制器生效!');}}8.EIO等文件加载完毕后,需要重启生效,可以添加远程重启按钮,代码如下:private void button9_Click(object sender, EventArgs e) {try{using (Mastership.Request(controller)){controller.Restart(ControllerStartMode.Warm);}}catch (Exception ex){MessageBox.Show(ex.Message.ToString());}MessageBox.Show('控制器重启中');。
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进展了描述。
图1-2对DSQC652端子台的各个端子与机器人部地址〔Device mapping〕关系进展了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32〔将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10〕。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进展通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值〞行的下拉菜单,选择“DSQC 652 24 VDC I/O Device〞,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启〞选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1参数名称设定值说明Name DI1 设定数字输入信号的名字Type of Signal Digital Input 设定信号的类型Assigned to Device DSQC 652 24 VDC I/O Device 设定信号所在的IO模块Device Mapping 1 设定信号所占用的地址Invert Physical Value NO 如果想将信号取反,可选Yes图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启〞选择【是】,完成数字输入信号DI1的创建。
abb修改位置的方法ABB修改位置的方法一、引言在现代工业生产中,自动化设备的使用越来越广泛。
ABB是一家领先的自动化技术公司,提供了各种各样的自动化设备和解决方案。
在生产过程中,有时候需要对ABB设备进行位置的调整或修改。
本文将介绍一种常见的ABB修改位置的方法。
二、背景ABB设备通常由多个组件组成,这些组件需要按照一定的规则进行布置。
有时候,由于工艺流程的调整或其他原因,需要对设备的位置进行修改。
这时候,我们可以使用ABB的软件来进行位置的调整。
三、步骤1. 连接设备:首先,需要将ABB设备与计算机进行连接。
可以通过串口、以太网或其他通信接口进行连接。
确保设备与计算机之间的通信正常。
2. 打开ABB软件:使用ABB提供的软件打开设备的控制界面。
不同的设备可能有不同的软件,根据具体设备选择相应的软件。
3. 导入设备配置:在软件中导入设备的配置文件。
配置文件包含了设备的参数和布局信息。
通过导入配置文件,可以方便地对设备的位置进行修改。
4. 修改设备位置:在软件中找到设备位置的相关设置,根据需要进行修改。
可以通过拖拽、输入坐标等方式进行位置的调整。
在进行修改之前,需要仔细阅读设备的操作手册,了解各个参数的含义和作用。
5. 保存修改:在完成位置的调整之后,及时保存修改。
可以将修改后的配置文件保存到本地或者上传至设备。
6. 测试设备:修改完成后,需要对设备进行测试,确保设备的功能正常。
可以使用ABB软件提供的测试工具或者其他测试设备进行测试。
7. 调整其他参数:除了位置之外,还可以根据需要调整设备的其他参数。
例如,速度、加速度、灵敏度等参数都可以通过软件进行调整。
8. 更新文档:在完成所有修改和测试之后,需要及时更新相关的文档。
包括设备的位置图、参数表、操作手册等。
这样可以确保后续操作人员能够正确使用设备。
四、注意事项1. 修改设备位置之前,一定要切断设备的电源,确保操作的安全性。
2. 在进行位置调整时,要注意设备之间的相互关系。
配置文件
配置文件是列出系统参数值的文本文件。
注意:
如果该参数指定默认值,那么就不会被列在配置文件。
控制器中有六个配置区域,配置文件保存为后缀.CFG文件。
配置文件默认保存在系统文件夹SYSPAR,例如.. \ MySystem\ SYSPAR\。
该配置文件包含在备份中。
注意;
配置文件,不能被以前的RobotWare系统加载。
配置文件:配置区域描述:
SIO.cfg 串行通道和文件传输协议通信。
SYS.cfg 安全和RAPID指定的特定控制器功能。
EIO.cfg I / O板和信号I/ O 。
MMC.cfg 功能,以简化与工作系统人机通讯。
MOC.cfg 机器人和外部轴运动。
PROC.cfg 处理特定的工具和设备。
保存内容备份功能可保存上下文中的所有系统参数、系统模块和程序模块。
备份内容数据保存于用户指定的目录中。
默认路径可加以设置。
目录分为四个子目录:Backinfo、Home、Rapid 和Syspar。
System.xml 也保存于包含用户设置的../backup (根目录)中。
Backinfo Backinfo 包含的文件有backinfo.txt、key.id、program.id 和system.guid、template.guid、keystr.txt。
恢复系统时,恢复部分将使用backinfo.txt。
该文件必须从未被用户编辑过!
文件key.id 和program.id 由RobotStudio Online 用于重新创建系统,该系统将包含与备份系统中相同的选项。
system.guid 用于识别提取备份的独一无二的系统。
system.guid 和/或template.guid 用于在恢复过程中检查备份是否加载到正确的系统。
如果system.guid和/ 或template.guid 不匹配,用户将被告知这一情况。
Home HOME 目录中的文件副本。
Rapid 包含每个配置任务的子目录。
每个任务有一个程序模块目录和一个系统模块目录。
第一个目录将保留所有安装模块。
有关加载模块和程序的详细信息,请参阅Technical reference manual - System parameters。
SysPar 包含配置文件。
不保存的内容备份过程中有些东西不会保存,了解这一点至关重要,因为有可能需要单独保存这些东西。
环境变量RELEASE: 指出当前系统盘包。
使用RELEASE: 加载的系统模块:作为它的路径,不会保存在备份中。
已安装模块中的PERS 对象的当前值不会保存在备份中。
备份系统
什么时候需要恢复系统?
ABB 建议在以下时间执行备份:
安装新RobotWare 之前。
对指令和/ 或参数进行重要更改以使其恢复为先前设置之前。
对指令和/ 或参数进行重要更改并为成功进行新的设置而对新设置进行测试之后。
系统参数用于定义系统配置并在出厂时根据客户的需要定义。
可使用FlexPendant 或RobotStudio Online 编辑系统参数。
此步骤介绍如何查看系统参数配置。
操作:
1. 在ABB 菜单上,点击控制面板。
2. 点击配置。
显示选定主题的可用类型列表。
3. 点击
? 主题。
? PROC
? Controller
? Communication
? System I/O
? Man-machine Communication
? Motion
其中,常用的信号配置有:I/O里面的Signal、signalinput和signaloutput 以及PROC(在装了弧焊软件包的情况下)中的Input 和Output。
机器人输入输出信号流程
图中说明的是:在signal中进行变量与板卡接口的映射配置;在System Input和System Output中进行IRC5中的变量与板卡接口定义的变量之间的映射配置(这些同样可以在EIO文件中完成配置);在PROC中进行弧焊软件包中的变量与板卡变量之间的映射配置(这些同样可以在PROC中完成配置)。
其中虚拟变量可以和真是的变量一样在一起进行定义配置,这些变量用”v”字开头,如:vdoGas。