基于LMS算法的图像自适应滤波方法研究
- 格式:doc
- 大小:27.00 KB
- 文档页数:4

基于LMS算法的自适应滤波器设计自适应滤波器是信号处理中常用的一种技术,可以根据输入信号的统计特性来调整滤波器参数,以实现信号的去噪、谱线增强等功能。
LMS (Least Mean Square,最小均方误差)算法是自适应滤波器中最常用的一种算法,它通过调整滤波器的权值,使得滤波器的输出信号与期望输出信号之间的均方误差最小。
本文将详细介绍基于LMS算法的自适应滤波器设计。
首先,我们先来了解LMS算法的原理。
LMS算法的核心思想是通过不断迭代调整滤波器的权值,使得滤波器的输出信号最小化与期望输出信号之间的均方误差。
算法的迭代过程如下:1.初始化滤波器权值向量w(0)为0;2.对于每个输入信号样本x(n),计算滤波器的输出信号y(n);3.计算实际输出信号y(n)与期望输出信号d(n)之间的误差e(n);4.根据误差信号e(n)和输入信号x(n)来更新滤波器的权值向量w(n+1);5.重复步骤2-4,直到满足停止条件。
在LMS算法中,滤波器的权值更新公式为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n+1)为更新后的权值向量,w(n)为当前的权值向量,μ为步长参数(控制权值的调整速度),e(n)为误差信号,x(n)为输入信号。
1.确定输入信号和期望输出信号的样本数量,以及步长参数μ的值;2.初始化滤波器的权值向量w(0)为0;3.依次处理输入信号样本,在每个样本上计算滤波器的输出信号y(n),并计算出误差信号e(n);4.根据误差信号e(n)和输入信号x(n)来更新滤波器的权值向量w(n+1);5.重复步骤3-4,直到处理完所有的输入信号样本;6.得到最终的滤波器权值向量w,即为自适应滤波器的设计结果。
在实际应用中,自适应滤波器设计的性能往往与步长参数μ的选择密切相关。
较小的步长参数会使得权值更新速度过慢,容易出现收敛慢的问题;而较大的步长参数可能导致权值在稳定后开始震荡,使得滤波器的性能下降。
电路最优化设计课程设计报告基于LMS算法的自适应滤波器设计一、内容摘要通过学习自适应滤波器和LMS算法基本原理,设计了一个二阶加权自适应横向滤波器, 并在MATLAB软件平台实现了仿真,最后对仿真结果作出了分析。
二、设计目的通过设计自适应滤波器并在在MATLAB实现仿真,进一步加深了解自适应滤波原理和LMS自适应算法。
、设计原理自适应滤波器由参数可调的数字滤波器和自适应算法两部分组成。
输入信号x(n)通过参数可调数字滤波器后产生输出信号y(n),将其与参数信号d(n)进行比较,形成误差信号e(n)。
e(n)通过某种自适应算法对滤波器参数进行调整,最终使e(n)的均方值最小。
最小均方误差LMS准则的目的在于使滤波器输出与期望信号误差的平方的统计平均值最小。
图1为LMS自适应横向滤波器原理图。
图1 LMS自适应横向滤波器原理图改自适应滤波器的输入矢量为:X(n) =[x(n)x(n -1)…x(n —m - 1)]T( 1)加权矢量为:W(n) =[W1( n) W2 (n)…W M (n)] 丁( 2)滤波器的输出为:My( n) = ' w i (n)x( n -i 亠1) = W T (n) X (n) =X T( n)W (n) (3)i 土y(n)相对于滤波器期望输出d( n)的误差为:e( n) =d( n) -y(n) =d( n) -W T (n)X( n) (4)根据最小均方误差准则,最佳的滤波器参量应使得性能函数均方误差f(W)二In) =E[e2(n)]为最小,上式称为均方误差性能函数。
假定输入信号x(n)和期望相应d(n)是联合平稳过程,那么在时刻n的均方误差是加权矢量的二次函数,其表达式为:'(n) =E[d2( n) —2P T W( n) W T (n ) R x W (n)] ( 5)式中:E[d (n)]是期望响应d(n)的方差;P=E[d(n)X(n)]是输入矢量X(n)和期望响应d(n)的互相矢量;R x=E[X(n)X T(n)]是输入矢量X(n)的自相关矩阵。
LMS类自适应滤波算法的研究LMS类自适应滤波算法的研究自适应滤波算法是一种可以根据输入信号的特性自动调整滤波器参数的方法。
它在信号处理、通信系统、控制系统等领域得到了广泛的应用。
LMS(Least Mean Square)是一种常用的自适应滤波算法,它通过最小化均方差来更新滤波器的权重,以实现滤波器的自适应性。
LMS算法的基本原理是通过梯度下降法来调整滤波器的权重。
假设输入信号为 x(n),期望输出信号为 d(n),滤波器的输出信号为 y(n),滤波器的权重为 w(n)。
算法的更新公式如下:w(n+1) = w(n) + μe(n)x(n)其中,w(n+1)是下一时刻的权重,w(n)是当前时刻的权重,μ是步进因子,e(n)是误差信号,x(n)是输入信号。
误差信号可以通过期望输出信号和滤波器的输出信号之间的差异计算得到:e(n) = d(n) - y(n)LMS算法的核心思想是根据误差信号的大小来更新滤波器的权重,使得误差信号逐渐趋近于零,从而实现滤波器的自适应。
步进因子μ的选择对算法的性能有着重要的影响。
当μ过小时,算法的收敛速度较慢;当μ过大时,算法可能发散。
因此,在实际应用中需要根据具体情况选择适当的步进因子。
除了LMS算法,还有一些与之类似的自适应滤波算法,如NLMS(Normalized Least Mean Square)算法和RLS (Recursive Least Squares)算法。
NLMS算法是一种对LMS算法的改进,通过归一化步进因子来改善收敛速度和稳定性。
RLS算法是一种基于递推最小二乘法的自适应滤波算法,相对于LMS算法具有更好的性能,但计算量较大。
LMS类自适应滤波算法广泛应用于信号降噪、自适应控制、信号预测等领域。
在信号降噪方面,LMS算法可以根据输入信号的特性实时调整滤波器的权重,抑制噪声,提高信号的质量。
在自适应控制方面,LMS算法可以根据目标系统的反馈信息实时调整控制器的参数,使得控制系统能够自动适应不同的工况,提高控制精度和稳定性。
使用LMS算法设计FIR自适应滤波器自适应滤波器是统计信号处理的一个重要组成部分。
在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此我们需要研究自适应滤波器。
凡是需要处理未知统计环境下运算结果所产生的信号或需要处理非平稳信号时,自适应滤波器可以提供一种吸引人的解决方法,而且其性能通常远优于用常方法设计的固定滤波器。
此外,自适应滤波器还能提供非自适应方法所不可能提供的新的信号处理能力。
通过《现代信号处理》这门课程的学习,掌握了自适应滤波器的基本理论、算法及设计方法。
本文中对最小均方误差(LMS)算法进行了认真的回顾,最终采用改进的LMS 算法设计FIR结构自适应滤波器,并采用MATLAB进行仿真。
一、自适应滤波器理论基础1、基本概念凡是有能力进行信号处理的装置都可以称为滤波器。
在近代电信装备和各类控制系统中,滤波器应用极为广泛;在所有的电子部件中,使用最多,技术最复杂要算滤波器了。
滤波器的优劣直接决定产品的优劣,所以,对滤波器的研究和生产历来为各国所重视。
滤波器是一种用来消除干扰杂讯的器件,将输入或输出经过过滤而得到纯净的交流电。
您可以通过基本的滤波器积木块——二阶通用滤波器传递函数,推导出最通用的滤波器类型:低通、带通、高通、陷波和椭圆型滤波器。
传递函数的参数——f0、d、hHP、hBP 和hLP,可用来构造所有类型的滤波器。
转降频率f0为s项开始占支配作用时的频率。
设计者将低于此值的频率看作是低频,而将高于此值的频率看作是高频,并将在此值附近的频率看作是带内频率。
阻尼d用于测量滤波器如何从低频率转变至高频率,它是滤波器趋向振荡的一个指标,实际阻尼值从0至2变化。
高通系数hHP是对那些高于转降频率的频率起支配作用的分子的系数。
带通系数hBP是对那些在转降频率附近的频率起支配作用的分子的系数。
低通系数hLP是对那些低于转降频率的频率起支配作用1的分子的系数。
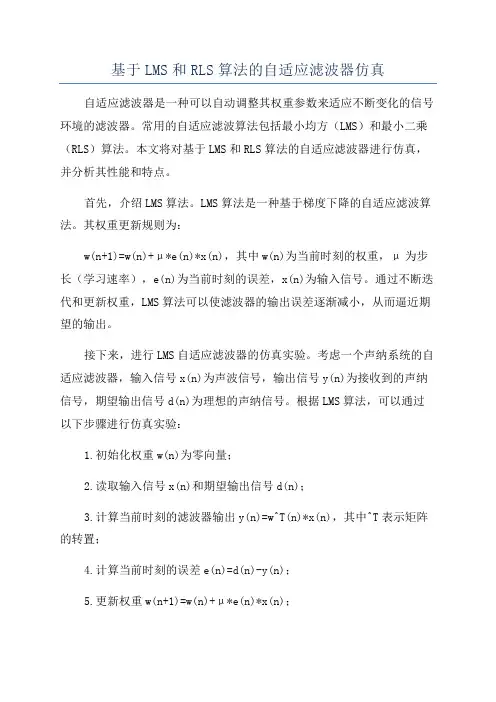
基于LMS和RLS算法的自适应滤波器仿真自适应滤波器是一种可以自动调整其权重参数来适应不断变化的信号环境的滤波器。
常用的自适应滤波算法包括最小均方(LMS)和最小二乘(RLS)算法。
本文将对基于LMS和RLS算法的自适应滤波器进行仿真,并分析其性能和特点。
首先,介绍LMS算法。
LMS算法是一种基于梯度下降的自适应滤波算法。
其权重更新规则为:w(n+1)=w(n)+μ*e(n)*x(n),其中w(n)为当前时刻的权重,μ为步长(学习速率),e(n)为当前时刻的误差,x(n)为输入信号。
通过不断迭代和更新权重,LMS算法可以使滤波器的输出误差逐渐减小,从而逼近期望的输出。
接下来,进行LMS自适应滤波器的仿真实验。
考虑一个声纳系统的自适应滤波器,输入信号x(n)为声波信号,输出信号y(n)为接收到的声纳信号,期望输出信号d(n)为理想的声纳信号。
根据LMS算法,可以通过以下步骤进行仿真实验:1.初始化权重w(n)为零向量;2.读取输入信号x(n)和期望输出信号d(n);3.计算当前时刻的滤波器输出y(n)=w^T(n)*x(n),其中^T表示矩阵的转置;4.计算当前时刻的误差e(n)=d(n)-y(n);5.更新权重w(n+1)=w(n)+μ*e(n)*x(n);6.重复步骤2-5,直到滤波器的输出误差满足预设条件或达到最大迭代次数。
然后,介绍RLS算法。
RLS算法是一种递推最小二乘的自适应滤波算法。
其基本思想是通过不断迭代更新滤波器的权重,使得滤波器的输出误差的二范数最小化。
RLS算法具有较好的收敛性和稳定性。
接下来,进行RLS自适应滤波器的仿真实验。
基于声纳系统的例子,RLS算法的步骤如下:1.初始化滤波器权重w(n)为一个较小的正数矩阵,初始化误差协方差矩阵P(n)为一个较大的正数矩阵;2.读取输入信号x(n)和期望输出信号d(n);3.计算增益矩阵K(n)=P(n-1)*x(n)/(λ+x^T(n)*P(n-1)*x(n)),其中λ为一个正则化参数;4.计算当前时刻的滤波器输出y(n)=w^T(n)*x(n);5.计算当前时刻的误差e(n)=d(n)-y(n);6.更新滤波器权重w(n+1)=w(n)+K(n)*e(n);7.更新误差协方差矩阵P(n)=(1/λ)*(P(n-1)-K(n)*x^T(n)*P(n-1));8.重复步骤2-7,直到滤波器的输出误差满足预设条件或达到最大迭代次数。
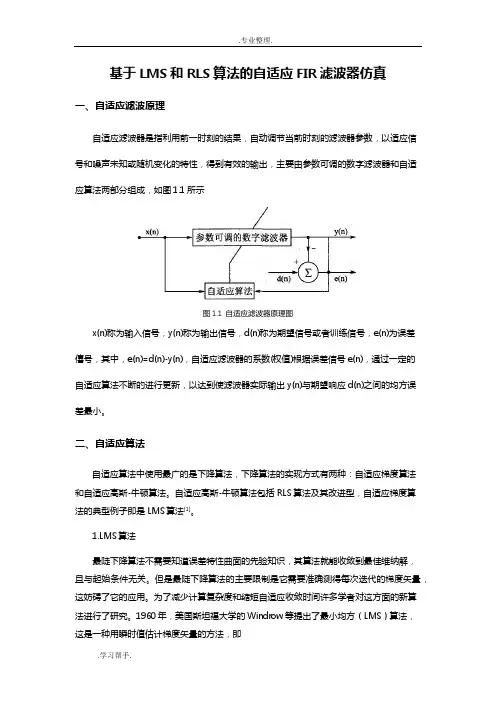
基于LMS和RLS算法的自适应FIR滤波器仿真一、自适应滤波原理自适应滤波器是指利用前一时刻的结果,自动调节当前时刻的滤波器参数,以适应信号和噪声未知或随机变化的特性,得到有效的输出,主要由参数可调的数字滤波器和自适应算法两部分组成,如图1.1所示图1.1 自适应滤波器原理图x(n)称为输入信号,y(n)称为输出信号,d(n)称为期望信号或者训练信号,e(n)为误差僖号,其中,e(n)=d(n)-y(n),自适应滤波器的系数(权值)根据误差信号e(n),通过一定的自适应算法不断的进行更新,以达到使滤波器实际输出y(n)与期望响应d(n)之间的均方误差最小。
二、自适应算法自适应算法中使用最广的是下降算法,下降算法的实现方式有两种:自适应梯度算法和自适应高斯-牛顿算法。
自适应高斯-牛顿算法包括RLS算法及其改进型,自适应梯度算法的典型例子即是LMS算法[1]。
1.LMS算法最陡下降算法不需要知道误差特性曲面的先验知识,其算法就能收敛到最佳维纳解,且与起始条件无关。
但是最陡下降算法的主要限制是它需要准确测得每次迭代的梯度矢量,这妨碍了它的应用。
为了减少计算复杂度和缩短自适应收敛时间许多学者对这方面的新算法进行了研究。
1960年,美国斯坦福大学的Windrow等提出了最小均方(LMS)算法,这是一种用瞬时值估计梯度矢量的方法,即2[()]()2()()()e n n e n x n w n ∧∂∇==-∂ 可见,这种瞬时估计法是无偏的,因为它的期望值E[)(n ∇∧]确实等于矢量)(n ∇。
所以,按照自适应滤波器滤波系数矢量的变化与梯度矢量估计的方向之间的关系,可以先写出LMS 算法的公式如下:1(1)()[()]()()()2w n w n n w n e n x n μμ∧∧∧∧+=+-∇=+ 将式e(n)=d(n)-y(n)和e(n)=d(n)-w H x(n)代入到上式中,可得到(1)()()[()()()][()()]()()()HH w n w n x n d n w n x n I x n x n w n x n d n μμμ∧∧∧∧+=+-=-+图2.1 自适应LMS 算法信号流图由上式可以得到自适应LMS 算法的信号流图,这是一个具有反馈形式的模型,如图2-1所示。
LMS算法实验报告LMS(Least Mean Squares)算法是一种基于梯度下降的自适应滤波算法,常用于信号处理、通信系统等领域。
本实验通过实现LMS算法并对其性能进行评估,探究其在自适应滤波中的应用。
1.实验背景自适应滤波在许多领域中被广泛应用,如信号降噪、语音增强、通信频谱感知等。
自适应滤波的核心思想是根据输入信号的特性自动调整滤波器的系数,以实现信号的最佳重构或增强。
2.实验目的本实验旨在通过实现LMS算法并对其性能进行评估,探究其在自适应滤波中的应用。
具体目的如下:1)了解LMS算法的基本原理和实现步骤;2)实现LMS算法,完成自适应滤波任务;3)评估LMS算法的性能,分析其在不同情况下的表现;4)对比LMS算法和其他自适应滤波算法的优缺点。
3.实验步骤本实验的实现步骤如下:1)理解LMS算法的基本原理和数学模型;2)根据LMS算法的更新规则,实现算法的代码;3)根据自适应滤波的具体任务需求,选择合适的输入信号和期望输出;4)根据实验需求,设置合适的参数(如学习率、滤波器长度等);5)使用LMS算法对输入信号进行滤波,并计算输出信号的均方误差;6)根据实验结果,评估LMS算法的性能,并进行分析。
4.实验结果根据以上步骤,完成了LMS算法的实现和性能评估。
实验结果显示,LMS算法能够有效地调整滤波器的权值,实现输入信号的滤波和增强。
随着学习率的增加,LMS算法的收敛速度较快,但容易发生震荡现象。
而学习率过小,则会导致算法收敛速度慢,需要更多的迭代次数才能达到较小的均方误差。
此外,在不同噪声情况下,LMS算法的性能表现也有所差异。
在信噪比较低的情况下,LMS算法的滤波效果明显,能够有效抑制噪声并实现信号增强。
然而,在信噪比较高的情况下,LMS算法的性能受到一定影响,可能会出现性能下降或收敛困难的情况。
5.总结与分析通过本实验,深入了解了LMS算法的原理和实现步骤,并对其性能进行了评估。
基于LMS算法的自适应滤波器研究与应用一、引言随着科技的不断进步,人们对于信号处理技术的需求越来越高。
自适应滤波器是一种能够高效地滤除噪声和干扰的信号处理方法,其在语音信号处理、图像处理等领域都有广泛应用。
LMS算法是一种经典的自适应滤波算法,本文将对基于LMS算法的自适应滤波器进行深入研究。
二、自适应滤波器自适应滤波器是利用反馈机制将输出信号与期望信号进行比较,不断调节滤波器的参数,使输出信号与期望信号的差别最小化,从而实现滤波效果的提高。
在自适应滤波器中,LMS算法是一种相对简单而又广泛应用的算法。
LMS算法的核心思想是,利用误差信号不断更新滤波器的参数,从而实现自适应调节。
具体来讲,LMS算法通过对于受到噪声和干扰的输入信号进行滤波,使得输出信号与期望信号之间的误差最小化,从而增强信号的可读性、可靠性和清晰度。
三、LMS算法的具体原理LMS算法的核心思想是不断寻求让滤波器的输出信号与期望信号之间误差最小的滤波参数。
具体而言,LMS算法采用误差,即输出信号与期望信号之间的差别,来更新滤波器的权值向量。
通过不断迭代计算,LMS算法可以优化滤波器的参数,实现更好的滤波效果。
在LMS算法中,滤波器的权值向量w被初始化为任意值,然后通过误差信号进行调整。
假设输出信号为y(n),期望信号为d(n),滤波器的输入信号为x(n),则LMS算法的更新公式为:w(n+1) = w(n) + 2μe(n)x(n)其中,w(n+1)表示n+1时刻的滤波器权值向量,w(n)表示n时刻的滤波器权值向量,μ为步长,e(n)为误差信号。
通过不断地迭代计算,LMS算法可以不断优化滤波器的参数,从而完善滤波效果。
四、LMS算法的应用LMS算法的应用非常广泛,在图像处理、语音识别、自适应控制等领域都有重要应用。
下面将针对图像和语音两类应用进行介绍。
1. 图像处理中的应用在图像处理中,LMS算法可以应用于图像降噪、图像去模糊等场景。
基于LMS算法与RLS算法的自适应滤波徐艳;李静【期刊名称】《电子设计工程》【年(卷),期】2012(020)012【摘要】The theory and technology of adaptive signal processing have become popular in filtering and canceling noise field. This article mainly talks about the theory of adaptive filtering and steps of the arithmetic based on LMS&RLS.Emulations successfully showed the theory by MATLAB in this paper.%自适应信号处理的理论和技术已经成为人们常用滤波和去噪技术。
文中讲述了自适应滤波的原理以及LMS算法和RLS算法两种基本自适应算法的原理及步骤。
并用MATLAB分别对两种算法进行了自适应滤波仿真和实现。
【总页数】4页(P49-51,54)【作者】徐艳;李静【作者单位】长安大学信息工程学院,陕西西安710064;长安大学信息工程学院,陕西西安710064【正文语种】中文【中图分类】TP312【相关文献】1.基于LMS算法与RLS算法自适应滤波及仿真分析 [J], 马国栋;阎树田;贺成柱;杨晨2.基于RLS算法的自适应抗干扰工频通信滤波器的设计与实现 [J], 徐婷;通旭明3.基于qF-LMS算法的自适应滤波器与FPGA实现 [J], 丁泽锋; 白路阳; 杨炜毅; 王艳芬4.基于LMS算法的自适应滤波器性能分析 [J], 刘建涛;席闯;姜海洋5.基于RLS算法的有源滤波器自适应基波检测方法(英文) [J], 姜孝华;金济;Ale Emedi因版权原因,仅展示原文概要,查看原文内容请购买。
基于LMS 算法的自适应滤波器仿真实现刘 影,南敬昌(辽宁工程技术大学电子与信息工程学院 辽宁葫芦岛 125105)摘 要:为了达到最佳的滤波效果,使自适应滤波器在工作环境变化时自动调节其单位脉冲响应特性,提出了一种自适应算法:最小均方算法(L MS 算法)。
这种算法实现简单且对信号统计特性变化具有稳健性,所以获得了极为广泛的应用。
针对用硬件实现L MS 算法的自适应滤波器存在的诸多缺点,采用Matlab 工具对基于L MS 算法的自适应滤波器进行了仿真试验。
仿真结果表明,应用L MS 算法的自适应滤波器不仅可以实现对信号噪声的自适应滤除,还能用于系统识别。
关键词:自适应滤波器;Matlab ;最小均方算法;FIR中图分类号:TN713 文献标识码:A 文章编号:10042373X (2008)192074203Implementation of Adaptive Filter Simulation B ased on LMS AlgorithmL IU Y ing ,NAN Jingchang(School of Electrics and Information Engineering ,Liaoning Technical University ,Huludao ,125105,China )Abstract :In order to achieve the optimum filtering effect ,it makes the adaptive filter adjust its units impulse response characteristics automatically on the working environment changed.This paper presents a kind of adaptive algorithm :Least Mean Square (L MS algorithm ).As the algorithm is realized simply and has stability with respect to the change of signal sta 2tistical characteristics ,L MS algorithm is used widely.According to disadvantages of adaptive filter to realize L MS using hard 2ware adaptive filter is simulated which is based on L MS algorithm with Matlab.Results of simulation show that this kind of adaptive filter not only can filter the signal noise ,but also recognize the system.K eywords :adaptive filter ;Matlab ;L MS algorithm ;FIR收稿日期:20082032281 引 言1960年Widrow 和Hoff 提出最小均方误差(L MS )算法。
基于LMS算法的自适应组合滤波器摘要提出了一种自适应组合滤波器。
它由并行LMS的自适应FIR滤波器和一个具有更好的选择性的算法组成。
作为正在研究中的滤波器算法比较标准,我们采取偏差和加权系数之间的方差比。
仿真结果证实了提出的自适应滤波器的优点。
关键词:自适应滤波器;LMS算法;组合算法;偏差和方差权衡第一章绪论自适应滤波器已在信号处理和控制,以及许多实际问题[1, 2]的解决当中得到了广泛的应用. 自适应滤波器的性能主要取决于滤波器所使用的算法的加权系数的更新。
最常用的自适应系统对那些基于最小均方(LMS)自适应算法及其改进(基于LMS的算法)。
LMS算法是非常简便,易于实施,具有广泛的用途[1-3]。
但是,因为它并不总是收敛在一个可接受的方式,所以有很多的尝试,以对其性能做适当改进:符号算法(SA)的[8],几何平均LMS算法(GLMS)[5],变步长LMS(最小均方比)算法[6,7]。
每一种基于LMS的算法都至少有一个参数在适应过程(LMS算法和符号算法,加强和GLMS平滑系数,各种参数对变步长LMS算法的影响)中被预先定义。
这些参数的影响关键在两个适应阶段:瞬态和稳态滤波器的输出。
这些参数的选择主要是基于一种算法质量的权衡中所提到的适应性能。
我们提出了一个自适应滤波器的性能改善的方法。
也就是说,我们提出了几个基于LMS算法的不同参数的FIR滤波器,并提供不同的适应阶段选择最合适的算法标准。
这种方法可以适用于所有的LMS的算法,虽然我们在这里只考虑其中几个。
第二章 基于LMS 的算法让我们定义输入信号向量T k N k x k x k x X )]1()1()([+--= 和矢量加权系数为T N k k W k W k W W )]()()([110-= 权重系数向量计算应根据:}{21k k k k X e E W W μ+=+(1)其中μ为算法步长,E{·}是预期值的估计。
在k T k k k X W d e -=中,常数K 表式误差,k d 是一个参考信号。
本科毕业论文(设计)题目基于LMS自适应滤波器的Matlab实现摘要:随着无线通信技术的不断发展和日益成熟,如何在复杂的通信环境下有效的解调信号并利于数字实现是近年研究的新课题。
在通信领域,自适应算法在自适应均衡、自适应频率跟踪与检测等方面的应用比较成熟。
随着研究的深入,发现利用自适应滤波器的抗干扰性能和对信号的跟踪能力,可以更加简单的提取基带信息,取得比常用相干解调更理想的性能。
本论文通过首先对各种自适应算法进行了研究和分析,并且利用Matlab对各种算法进行了简单的仿真。
然后就LMS自适应滤波器在系统辨识、自回归过程的自适应预估器、噪声抵消、回声抵消以及在直括系统中实现伪码同步这些应用进行Matlab仿真和分析。
本论文主要包括以下几个内容:简介自适应滤波器原理中的维纳滤波器和最陡下降法两个内容。
讨论了基本最小均方算法、归一化LMS算法,LMS自适应滤波器在系统辨识、自回归过程的自适应预估器、噪声抵消、回声抵消,利用Matlab进行了编程仿真和分析。
关键词:LMS算法自适应滤波器Matlab 应用仿真ABSTRACT:As wireless communications technology and the continuous development of increasingly mature, how in the complex environment of effective communication signal demodulator and is conducive to achieving figures in recent years on a new topic. In the field of communications, adaptive algorithm in the adaptive equalization, adaptive frequency tracking and detection, such as the application of more mature. With the in-depth study and found that the use of adaptive filter performance and anti-jamming signals on the tracking capability, could be more simple with the extraction of information, a coherent demodulation more common than ideal performance.Through the first adaptive algorithm for a variety of research and analysis and use of various algorithms Matlab a simple simulation. Then on the LMS adaptive filter in the system identification, since the reunification process of adaptive predictor, noise cancellation, echo cancellation and in straight including pseudo-code system to achieve synchronization of these applications Matlab simulation and analysis.In this paper, include the following elements:Introduction of the principle of adaptive filter Wiener filters and two of the most steep decline in content.Discussed the basic minimum square algorithm, normalization of LMS algorithm.LMS adaptive filter in the system identification, since the reunification process of adaptive predictor, noise cancellation, echo cancellation and the DS system to achieve the application of pseudo-synchronous code, using a Matlab programming simulation and analysis.Keywords:LMS algorithm; adaptive filter; Matlab; Application Simulation目录一、1 绪论 (4)研究内容及课题意义 (4)2 LMS自适应滤波原理 (4)维纳滤波器 (6)2.1.1线性最优滤波 (6)2.1.2正交性原理 (7)2.1.3维纳-霍夫方程 (8)2.1.4误差性能表面 (9)最陡下降法[1] (10)2.2.1算法稳定性 (14)2.2.2自调整过程 (15)自适应滤波器结构 (17)3 最小均方算法及Matlab仿真分析 (18)基本最小均方算法 (18)3.1.1自适应收敛性 (19)3.1.2缩短收敛过程的方法 (21)3.1.3 Matlab仿真分析 (22)归一化LMS算法 (23)3.2.1基本原理 (23)3.2.2 Matlab仿真与分析 (26)4 LMS自适应滤波器的应用 (27)系统辨识与Maltab仿真 (27)4.1.1系统和模型 (27)4.1.2辨识建模的定义 (28)4.1.3系统辨识原理 (28)4.1.3 Matlab仿真 (29)回声抵消与Maltab仿真 (30)4.2.1线路回声 (30)4.2.2线路回声抵消器 (31)4.2.3 Matlab仿真 (32)5 总结和展望 (35)总结 (35)展望 (36)一、1 绪论研究内容及课题意义数字集成电路和微电于技术的迅速发展给自适应信号处理技术的应用提供了十分优越的条件。
自适应均衡算法LMS研究一、自适应滤波原理与应用所谓自适应滤波器,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。
根据环境的改变,使用自适应算法来改变滤波器的参数和结构。
1.1均衡器的发展及概况均衡是减少码间串扰的有效措施。
均衡器的发展有史已久,二十世纪60年代前,电话信道均衡器的出现克服了数据传输过程中的码间串扰带来的失真影响。
但是均衡器要么是固定的,要么其参数的调整是手工进行。
1965年,Lucky在均衡问题上提出了迫零准则,自动调整横向滤波器的权系数。
1969年,Gerhso和Porkasi,Milier分别独立的提出采用均方误差准则(MSE)。
1972年,ungeboekc将LMS算法应用于自适应均衡。
1974年,Gedard 在kalmna滤波理论上推导出递推最小均方算法RLS(Recursive least-squares)。
LMS类算法和RLS类算法是自适应滤波算法的两个大类。
自适应滤波在信道均衡、回波抵消、谱线增强、噪声抑制、天线自适应旁瓣抑制、雷达杂波抵消、相参检测、谱估计、窄带干扰抑制、系统辨识、系统建模、语音信号处理、生物医学、电子学等方面获得广泛的应用。
1.2均衡器种类均衡技术可分为两类:线性均衡和非线性均衡。
这两类的差别主要在于自适应均衡器的输出被用于反馈控制的方法。
如果判决输出没有被用于均衡器的反馈逻辑中,那么均衡器是线性的;如果判决输出被用于反馈逻辑中并帮助改变了均衡器的后续输出,那么均衡器是非线性的。
图1.1 均衡器的分类1.3自适应算法LMS 算法LMS 算法是由widrow 和Hoff 于1960年提出来的,是统计梯度算法类的很重 要的成员之一。
它具有运算量小,简单,易于实现等优点。
LMS 算法是建立在Wiener 滤波的基础上发展而来的。
Wiener 解是在最小均方误差(MMSE)意义下使用均方误差作为代价函数而得到的在最小误差准则下的最优解。
实验报告实验名称:基于LMS算法的自适应滤波实验报告实验名称:基于LMS算法的自适应滤波实验内容:最小均方算法即LMS是一种自适应滤波算法,这里的Matlab程序根据LMS对一个线性噪声系统进行滤波。
实验原理:最小均方算法是一种以期望响应和滤波器输出信号之间误差的均方值最小为原则,依据输入信号在迭代过程中估计梯度矢量,并更新权系数以达到最佳的自适应迭代算法。
实验程序:clear;clc;grid off;%周期信号的产生t=0:99;sn=10*sin(0.5*t);figure(1)subplot(2,1,1)plot(t,sn);title('原始的周期信号')grid on;%噪声信号的产生randn('state',sum(100*clock));noise=randn(1,100);subplot(2,1,2)plot(t,noise);title('噪声信号')grid on;%信号滤波xn=sn+noise;xn=xn.';dn=sn.';M=20;figure(2)subplot(2,1,1)plot(t,xn)title('加噪声后的信号波形')grid on;%初始化r_max=max(eig(xn*xn.'));mu=rand()/r_max;itr=length(xn);en=zeros(itr,1);w=zeros(M,itr);%LMSfor k=M:itrx=xn(k:-1:k-M+1);y=w(:,k-1).'*x;en(k)=dn(k)-y;%加权因子w(:,k)=w(:,k-1)+2*mu*en(k)*x;endyn=inf*ones(size(xn));for k=M:itrx=xn(k:-1:k-M+1);yn(k)=w(:,end).'*x;end%画图subplot(2,1,2)plot(t,yn)title('滤波器输出信号')grid on;figure(3)hold on;plot(t,dn,'g',t,yn,'b',t,dn-yn,'r'); grid on;legend('期望输出','滤波器输出','误差')实验结果仿真:实验总结:LMS算法是一种梯度最速下降算法,其显著特点是简单、计算量小、易于实现。
LMS与RLS自适应滤波算法对比研究
一、背景介绍
自适应滤波是现代通信和信号处理中非常重要的技术,它可以有效的
去除信号中的突发噪声,提取出有效的信号。
传统的滤波方法是基于给定
的滤波器参数来完成,无法适应环境变化,难以达到较好的过滤效果,所
以传统的滤波方法的性能不能满足视频真实环境下的实时过滤要求。
LMS
和RLS算法便是一种自适应滤波算法,它们能够适应复杂、随机的信号环境,以获取较高的滤波效率和单位突发噪声的抑制能力。
两者具有共同之处,又能够满足特定的应用需求,因此在信号处理方面有其特有的应用价值。
二、LMS算法介绍
LMS算法是由 Widrow和Hoff于1960年提出的一种自适应滤波算法,它是一种局部最小二乘法。
它通过一系列的参数更新,以实时的方式用最
小均方误差的原则,尽可能接近实时输入信号的期望值。
LMS算法速度快,不需要额外的矩阵求逆操作,而且只用到了一个小型矩阵,对于实时性能
要求高的应用是一个较好的选择。
三、RLS算法介绍
RLS算法是由Park和Kendall于1960年提出的一种自适应滤波算法,它实现了局部最小二乘估计。
与LMS算法不同的是,RLS算法引入了一个
状态变量,可以单独对待每一个输入信号,从而可以更新滤波器的参数,
以实现快速的收敛性。
基于LMS 算法的自适应滤波器仿真实现刘 影,南敬昌(辽宁工程技术大学电子与信息工程学院 辽宁葫芦岛 125105)摘 要:为了达到最佳的滤波效果,使自适应滤波器在工作环境变化时自动调节其单位脉冲响应特性,提出了一种自适应算法:最小均方算法(L M S 算法)。
这种算法实现简单且对信号统计特性变化具有稳健性,所以获得了极为广泛的应用。
针对用硬件实现LM S 算法的自适应滤波器存在的诸多缺点,采用M at lab 工具对基于LM S 算法的自适应滤波器进行了仿真试验。
仿真结果表明,应用LM S 算法的自适应滤波器不仅可以实现对信号噪声的自适应滤除,还能用于系统识别。
关键词:自适应滤波器;M atlab;最小均方算法;F IR中图分类号:T N713 文献标识码:A 文章编号:1004-373X(2008)19-074-03Implementation of Adaptive Filter Simulation Based on LMS AlgorithmL IU Y ing,N A N Jing chang(Scho ol o f Electrics and Inf ormat ion Engineering,Liaoning T echnical U niv ersity ,H ul udao,125105,China)Abstract :In order to achieve the optimum filter ing effect,it makes the adaptive filter adjust its units impulse respo nse char act er istics automatically on the w o rking env ir onment chang ed.T his pa per present s a kind of adaptiv e algo rithm:Least M ean Squar e (L M S alg or ithm).A s t he algo rit hm is realized simply and has stability w it h r espect t o the change of sig nal sta -t istical character istics,L M S alg or ithm is used w idely.A cco rding to disadvantages of adapt ive filter to realize L M S using ha rd -w are adapt ive filter is simulated w hich is based on LM S algo rithm w ith M atlab.Results of simulat ion show that this kind of adaptiv e filter not only can f ilter the signal noise,but also recog nize the system.Keywords :adaptiv e filter;M atlab;L M S algo rithm;FIR收稿日期:2008-03-281 引 言1960年Widr ow 和H o ff 提出最小均方误差(LMS)算法。
基于LMS算法的图像自适应滤波方法研究
【摘要】:在图象处理工作中,为了免除噪声的干扰,需要对图像进行预处理。
本论文对现有的图像滤波方法与LMS算法进行了介绍,并针对目前的基于LMS的自适应滤波方法进行了介绍和研究。
【关键词】:图像滤波; 自适应滤波; LMS
现实中我们得到的图象信号都或多或少的被噪声污染,因此在进行进一步的边缘检测、图象分割、特征提取、模式识别等处理之前,尽量减少噪声是一个非常重要的预处理步骤。
遗憾的是,迄今为止没有一种通用的滤波算法能对不同类型的图象都能取得很好的效果,就是对同一幅图象,如果噪声类型不同,滤波的效果也各异。
而且不同的研究目的、实际图象特点、噪声的统计特征和频谱分布的规律,滤波算法也应不同。
因为噪声伴随在图象中,根据不同的研究目的,而且为了进一步进行更高层次的处理,有必要对图象进行去除噪声。
这也是在图像处理系统中,图像预处理工作如此重要的原因。
滤波器研究的一个基本问题就是:如何设计和建立最佳或最优的滤波器。
所谓最佳滤波器是指能够根据某一最佳准则进行设计的滤波器。
20世纪40年代,维纳奠定了关于最佳滤波器研究的基础。
假定线形滤波器的输入为有用信号和噪声之和,两者均为广义平稳过程;并且已知它们的二阶统计特性,根据最小均方误差准则,维纳求得了最佳线形滤波器的参数。
这种滤波器成为维纳滤波器。
要实现维纳滤波,就要求:(1)输入信号时广义平稳的;(2)输入信号的统计特征是已知的。
根据其他最佳准则的滤波器已有同样要求,比如卡尔曼滤波器。
然而,由于输入过程取决于外界的信号、干扰环境,这种统计特性常常是未知的、变化的,因而不能满足上述两个要求,用维纳滤波器实现不了最优滤波。
在这种情况下,自适应滤波能够提供卓越的滤波性能。
1.自适应滤波器概述
所谓自适应滤波,就是利用前一时刻已获得的滤波器参数的结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。
常用的一些自适应滤波器的结构有开环和闭环自适应结构等,如图1-1所示。
自适应算法主要根据滤波器输入的统计特性进行处理。
它可能还与滤波器输出和其他数据有关。
开环算法的控制输出仅取决于滤波器的输入和某些其他输入函数,但绝小取决于滤波器的输出。
闭环算法的控制输出则是滤波器输入、滤波器输出以及某些其他输入的函数。
图1-2给出了两种典型的闭环结构自适应滤波器结构图。
自适应滤波器在结构上常用的有有限冲激响应(FIR)滤波器和无限冲激响应(IIR)滤波器,而IIR滤波器又可用2个FIR滤波器来构成。
因此最经典的结构是FIR滤波器,对滤波器采用小同的误差准则便可获得不同的算法。
自适应滤波技术自发展以来,形成了多种算法。
常用的自适应滤波器有-RLS(最小二乘)、LMS(最小均方)、LSL(最小二乘格式)滤波器,FTF(快速横向滤波)等。
其中,RLS和LMS又是用得比较多的滤波器算法。
从收敛速度和运算量等方而综合考虑,RLS滤波器的收敛速度较LMS快,但RLS运算量较大,不太适合在DSP平台上实时实现。
本论文将主要介绍LMS滤波器的设计。
2. 数字滤波器的基本概念
从输入信号中滤出噪声和干扰以提取有用信息的过程称为滤波,相应的装置称为滤波器。
如果滤波器的输入和输出均为离散信号,称该滤波器为数字滤波器。
当滤波器的输出信号为输入端的线性函数时,该滤波器称为线性滤波器,否则就称为非线性滤波器。
一个典型的数字滤波器的框图如图3.1所示。
3. 变步长LMS算法分类
系统跟踪能力和系统抗噪声性能之间存在着矛盾,在不同时期采用不同的控制步长策略,我们提出基于相关箕舌线的变步长LMS算法。
随着需求的不断提高,多种改进型的LMS算法被提出,归纳起来主要有两种。
①变步长LMS算法变步长LMS算法是基于这样的准则:当权系数远离最佳权系数时,步长比较大,以加快收敛速度和对时变系统的跟踪速度;当权系数接近最佳权系数,步长比较小,以获得较小的稳态失调噪声。
②变换域LMS算法当输入信号本身具有很强的相关性时,时域LMS算法就会收敛速度减慢。
可以通过某种正交变换,先去除输入信号之间的相关性,再进行自适应滤波,这种算法就称为变换域LMS算法。
变换域LMS算法与时域LMS算法的区别主要在于多了一个正交变换的过程。
分析现有的文献资料,变步长算法都是利用自适应过程中提供的某种近似值作为衡量标准来调节步长。
比较简单有效的方法是利用自适应过程中的误差信号,试图在步长与误差信号之间建立某种函数关系。
己经用到的有:
①步长正比于误差信号的大小;
②步长与均方瞬时误差建立关系;
③尽量减少每一次迭代的均方估计误差;
④步长与e(n)和x(n)的互相关函数的估值成正比;
⑤使用当前误差与上一步误差的自相关估计来控制步长更新;,
⑥基于某种函数曲线更新步长;
在这些算法中,具有代表性的是高鹰,谢胜利提出的一种变步长LMS自适应滤波算法及分析中提出的算法。
具体的算法如下:
①步长声与均方瞬时误差建立关系
其提出的具有代表性的利用步长u与均方瞬时误差建立关系的两种变步长LMS算法,高鹰,谢胜利提出的算法称为VLMS算法,权系数迭代公式为
W(n+1)=W(n)+u(n)e(n)x(n) (3-1)
其中e(n)由(1)式所示。
步长u (n)的更新式为
u’(n+ 1)=u (n)+e2(n) (3-2)
00
00, 00.
③基于某种函数曲线更新步长
李真芳,苏涛,黄小宇提出了基于S函数的变步长LMS算法(SVSLMS ),SVSLMS算法在收敛速度、稳定性、跟踪速度等方面取得较好的结果。
但它存在两个缺陷:(1)稳态自适应阶段,du/de较大,e的微小变化引起u的较大变化,从而影响稳态误差;(2)采用S函数,求步长因子u(n)需要进行指数运算,采用查表法很繁琐,且占用硬件存储空间。
变步长LMS自适应滤波算法是由其改进而得到,函数比其简单,并且在e(n)接近零处变化缓慢,但仍需要指数运算。
Texas Instruments提出了基于箕舌线的变步长LMS算法((TCLMS). TCLMS 算法的步长更新公式为:
Texas Instruments提出的算法中中b的最佳取值为100。
基于箕舌线的变步长LMS算法除了在稳态阶段步长因子很小且变化不大外,还不需进行指数运算,减小了计算复杂度。
该算法在收敛精度与NLMS算法和SVSLMS算法相同的前提下,有更快的收敛速度和跟踪速度,更大程度地解决了收敛速度和稳态误差的内在矛盾。
4. 结论
自适应信号处理技术广泛应用于图像处理、系统辨识、回波消除、等诸多信号处理领域中。
自从Widrow提出著名的LMS算法以来,人们已经提出了许多自适应滤波算法,对自适应滤波算法的研究己经成为当今自适应信号处理中最为活跃的研究课题之一。
信号的统计量在自适应信号处理中起着极其重要的作用,本论文对基于LMS算法的若干自适应滤波算法进行了介绍和研究。
参考文献
[1] 谢胜利,何昭水,高鹰. 信号处理的自适应理论[M]. 北京:科学出版社.
[2] 高鹰,谢胜利. 一种变步长LMS自适应滤波算法及分析[J] . 电子学报.
[3] 周辉,董正宏. 数字信号处理基础及MATLAB实现[M]. 北京:希望电子出版社.
[4] 姚天任, 孙洪. 现代数字信号处理[M]. 武汉:华中科技大学出版社.
注:本文中所涉及到的图表、注解、公式等内容请以PDF格式阅读原文。