基于RLS算法自适应滤波器要点
- 格式:doc
- 大小:453.50 KB
- 文档页数:17
基于LMS和RLS的自适应滤波器的应用仿真————————————————————————————————作者:————————————————————————————————日期:湖南大学计算机与通信学院课程作业2题目:基于LMS和RLS的自适应滤波器的应用仿真基于LMS 和RLS 的自适应滤波器应用仿真1. 自适应滤波原理自适应滤波器是指利用前一时刻的结果,自动调节当前时刻的滤波器参数,以适应信号和噪声未知或随机变化的特性,得到有效的输出,主要由参数可调的 数字滤波器和自适应算法两部分组成,如图1所示图1 自适应滤波器原理图x(n)称为输入信号,y(n)称为输出信号,d (n )称为期望信号或者训练信号,e(n)为误差僖号,其中,e(n )=d (n)—y (n).自适应滤波器的系数(权值)根据误差信号e (n ),通过一定的自适应算法不断的进行改变,以达到使输出信号y(n )最接近期望信号图中参数可调的数字滤波器和自适应算法组成自适应滤波器。
自适应滤波算法是滤波器系数权值更新的控制算法,根据输入信号与期望信号以及它们之间的误差信号,自适应滤波算法依据算法准则对滤波器的系数权值进行更新,使其能够使滤波器的输出趋向于期望信号。
原理记数字滤波器脉冲响应为:h(k )=[h 0(k ) h 1(k) … h n-1(k)]T输入采样信号为:x (k)=[x(k ) x(k —1) … x(k-n-1)] 误差信号为:)()()(^k y k y k e -= ()()()()Te k y k h k x k =-优化过程就是最小化性能指标J(k),它是误差的平方和:21()[()()()]kT i J k y i h k x i ==-∑求使J(k )最小的系数向量h(k ),即使J(k )对h (k )的导数为零,也就是0)()(=k dh k dJ 。
把J (k )的表达式代入,得:12[()()()]()0kTi y i hk x i x i =-=∑和11()()()()()kkTTT i i xi y i h k x i x i ===∑∑由此得出滤波器系数的最优向量:11()()()()()kTTi k Ti xi y i h k x i xi ===∑∑这个表达式由输入信号自相关矩阵()xx c x 和输入信号与参考信号的相关矩阵()yx c k 组成,如下所示,维数都为(n,n ): 1()()()kTxx i c k xi x i ==∑1()()()kTyx i c k xi y i ==∑系数最优向量也可以写成如下形式:1()()()T opt yx xx h k c k c k -=自相关和互相关矩阵的递归表达式如下:()(1)()()T xx xx c k c k x k x k =-+ ()(1)()()Tyx yx c k c k y k x k =-+把()yx c k 的递归表达式代入系数向量表达式,得:1()()()T yx xx h k c k c k -=即1()[(1)()()]()TTyx xx h k c k x k y k c k -=-+考虑到(1)(1)(1)Tyx xx c k h k c k -=--可以记1()()[(1)(1)()()]xx xx h k c x c k h k y k x k -=--+用前面得到的表达式求出(1)xx c k -,并代入上式:1()(){[()()()](1)()()}T xx xx h k c x c k x k x k h k y k x k -=--+ 或 1()(1)()[()()()()(1)]T xx h k h k c x y k x k x k x k h k -=-+--则滤波器系数的递归关系式可以记作1()(1)()[()()()()(1)]T xx h k h k c x y k x k x k x k h k -=-+--其中()()()(1)T e k y k x k h k =--e(k )表示先验误差.只因为它是由前一个采样时刻的系数算出的,在实际中,很多时候由于h(k )计算的复杂度而不能应用于实时控制。
基于LMS和RLS算法的自适应滤波器仿真自适应滤波器是一种可以自动调整其权重参数来适应不断变化的信号环境的滤波器。
常用的自适应滤波算法包括最小均方(LMS)和最小二乘(RLS)算法。
本文将对基于LMS和RLS算法的自适应滤波器进行仿真,并分析其性能和特点。
首先,介绍LMS算法。
LMS算法是一种基于梯度下降的自适应滤波算法。
其权重更新规则为:w(n+1)=w(n)+μ*e(n)*x(n),其中w(n)为当前时刻的权重,μ为步长(学习速率),e(n)为当前时刻的误差,x(n)为输入信号。
通过不断迭代和更新权重,LMS算法可以使滤波器的输出误差逐渐减小,从而逼近期望的输出。
接下来,进行LMS自适应滤波器的仿真实验。
考虑一个声纳系统的自适应滤波器,输入信号x(n)为声波信号,输出信号y(n)为接收到的声纳信号,期望输出信号d(n)为理想的声纳信号。
根据LMS算法,可以通过以下步骤进行仿真实验:1.初始化权重w(n)为零向量;2.读取输入信号x(n)和期望输出信号d(n);3.计算当前时刻的滤波器输出y(n)=w^T(n)*x(n),其中^T表示矩阵的转置;4.计算当前时刻的误差e(n)=d(n)-y(n);5.更新权重w(n+1)=w(n)+μ*e(n)*x(n);6.重复步骤2-5,直到滤波器的输出误差满足预设条件或达到最大迭代次数。
然后,介绍RLS算法。
RLS算法是一种递推最小二乘的自适应滤波算法。
其基本思想是通过不断迭代更新滤波器的权重,使得滤波器的输出误差的二范数最小化。
RLS算法具有较好的收敛性和稳定性。
接下来,进行RLS自适应滤波器的仿真实验。
基于声纳系统的例子,RLS算法的步骤如下:1.初始化滤波器权重w(n)为一个较小的正数矩阵,初始化误差协方差矩阵P(n)为一个较大的正数矩阵;2.读取输入信号x(n)和期望输出信号d(n);3.计算增益矩阵K(n)=P(n-1)*x(n)/(λ+x^T(n)*P(n-1)*x(n)),其中λ为一个正则化参数;4.计算当前时刻的滤波器输出y(n)=w^T(n)*x(n);5.计算当前时刻的误差e(n)=d(n)-y(n);6.更新滤波器权重w(n+1)=w(n)+K(n)*e(n);7.更新误差协方差矩阵P(n)=(1/λ)*(P(n-1)-K(n)*x^T(n)*P(n-1));8.重复步骤2-7,直到滤波器的输出误差满足预设条件或达到最大迭代次数。
1引言目前,自适应滤波器技术在通信和雷达技术的信道均衡、回波抵消、噪声消除或抑制、语音编码、自适应跳频、天线旁瓣抑制、谱线增强、雷达杂波处理、雷达运动目标显示、窄带干扰抑制以及生物医学中的微弱电信号的处理等方面均获得了广泛的应用. 自适应滤波器是这样的处理器, 它在输入信号特性未知或者输入信号特性变化时,能够调整自己的参数, 以满足某种最佳滤波准则的要求.在设计滤波器时应该根据输入信号的特性,设计出最佳的滤波器. 那么, 什么样的滤波效果才算是最佳呢? 必须有一个判断的标准. 至今已研究出很多最佳滤波准则. 常见的有最小均方误差准则、最小二乘准则等. 最佳滤波准则和自适应滤波器关系密切,最佳滤波准则规定了与某种特性的信号对应的最佳参数,而这个最佳参数指出了自适应滤波器调整参数的方向. 以下主要介绍这两个准则.(1 最小均方误差准则 LM S(Least M ean Squar e 就是要使输出信号和理想信号的误差的平方的均值最小. 设 d(n 为滤波器输出要逼近的信号, y(n 为滤波器输出信号, 则误差为 e(n =d(n -y(n , 最小均方误差准则就是要使 E {e 2(n }达到最小.(2 最小二乘准则 LS(Least Squar e 就是要使一定范围内(从 k 到 k+m - 误差的平方和达到最小, 也就是要使 k+m -1i =k Σ达到最小.2最小二乘法 (RLS最小二乘算法(LS, Least -squar es 是一种批处理方法, 通过一个数据块接一个数据块的重复计算来适应非平稳数据, 因此它的计算量大. 推广最小二乘法将得到一种应用更广泛的算法, 即递推最小二乘法(R LS . 一般说来, R LS 算法具有较好的收敛性能和跟踪能力, 但是要求较多的计算量, 目前最快的 R LS 算法要比 LM S 算法多 2-3倍的计算量, 因此, R LS 自适应滤波一般用于要求较高的场合. 2. 1R LS 算法原理由于 LM S 算法的收敛速度很慢,为了得到较快的收敛速度, 有必要设计包含附加参数的更复杂的算法. 在快速收敛算法的推导中, 我们将采用最小二乘法. 因此, 将直接处理接收数据, 使二次性能指数最小, 而 LM S 是使平方误差的期望值最小. 这就意味着用时间平均而不是统计平均来表示性能指数.基于时间平均的最小平方误差被定义如下:J(n =ni =1Σλe 2(i (1式中, λ是接近 1, 但是小于 1的加权因子, 且误差 e(i 为:e(i =d(i -X T W (n (2 且 X (i =[x(i , x(i -1 , … , x(i -M +1 ]T(3 式中, X (i 是 i时刻的输入数据向量, W (n 是 n 时刻的新的抽头增益向量. 因而 e(i 是用 n 时刻的抽头增益向量测试时刻的旧数据所得的误差, J(n 是在所有旧数据上用新抽头增益所得的累计平方误差.要完成 R LS 算法就要找到均衡器的抽头增益向量 W (n , 使得累计平方误差J(n 最小. 为了测试新的抽头增益向量, 会用到那些先前的数据. 而因子λ会在计算时更依赖于新近的数据, 也就是说, J(n 会丢掉非稳定环境中的较旧的数据. 如果信道是稳定的, 那么λ可以设为 1.为了获得 J(n 的最小值, 可使 J(n 的梯度为 0, 即坠 J(n =0通过运算可知:R (nW 赞 (n =P(n (4式中, W 赞 (n 是 R LS 均衡器的最佳抽头增益向量. 方阵 R (n 是输入数据向量X (i 的确定相关矩阵, 向量 P(n 是输入向量 X (i 和期望输出 d(i 之间的确定互相关矩阵, 即:R (n =ni =1Σλn-1X *(i X T (i (5 P(n =n i =1Σλn-1d *(i X (i(6要用式(4 均衡器的抽头增益向量W 赞 (n , 就需要计算 R -1(n . 从式(5 中 R (n 的定义式, 我们可以得到关于 R (n-1 的递归公式:R (n =λR (n-1 +X (n X T (n (7同理得到 P(n 的递推表示式为:P(n =λP(n-1 +X (n d(n (8根据矩阵求逆定理, 若 A , B 是 M ×M 的正定矩阵,C 是一个 M ×N 矩阵,D 是一个 N ×N 矩阵, 当 A =B -1+CD -1C T 时, 有 A -=B-BC (D +C T BC -1C TB.现令 A =R (n , B -1=λR (n-1 , C=XR LS 自适应滤波器的 M at l ab 设计与仿真张立萍(赤峰学院物理与电子信息工程系,内蒙古赤峰024000摘要:自适应滤波技术已经被广泛应用于数字通信、雷达、生物医学和工业控制等领域 . 本文介绍了 R LS 算法, 并以随机干扰噪声信号为研究对象, 在 Matlab 上设计了 R LS 自适应滤波器的 M 文件,进行了仿真, 为硬件实现提供了有力的参考 . 关键词:自适应滤波器; R LS 算法; Matlab ; M 文件中图分类号:TN 273. 2文献标识码:A 文章编号 :1673-260X (2011 04-0025-02Vol. 27No. 4Apr. 2011第 27卷第 4期 2011年 4月赤峰学院学报(自然科学版 Journal of Chifeng University (Natural Science Edition 25--(n , D =J, 可以得到 R -1(n 递归公式:R -1(n =1R -1(n-1 - R -1(n-1 X (n X T (n R -1(n-1! " (9 令:K (n =R -1(n-1 X (n (10则(9 变为:R -1(n =λ-1[R -1(n-1 -K (n X T (n R -1(n-1 ](11 将式(10 中 K (n 的表示式重新安排:K (n =λ-1R -1(n-1 X (n -λ-1K (n X T (n R -1(n-1 X (n=λ-1[R -1(n-1 -K (n X T (n R -1(n-1 ]X (n=R -1(n X (n (12 由式(4 、 (8 、 (11 和式(12 可得W 赞 (n 的递推公式:W 赞 (n =R -1(n P(n =R -1(n [λP(n-1 +X (n d(n=λR -1(n P(n-1 +R -1(n-1 X (n d(n=λλ-1[R -1(n-1 -K (n X T (n R -1(n-1 ]P(n-1 +R -1(n-1 X (n d(n =R -1(n-1 P(n-1 -K (n X T (n R -1(n-1 P(n-1 +K (n d(n =W 赞 (n-1 -K (n X T (n W 赞 (n-1 +K (n d(n=W 赞 (n-1 +K (n [d(n -X T (n W 赞 (n-1 ]=W 赞 (n-1 +K (n α(n式中:α(n =d(n -X T (n W 赞 (n-1内积 X T (n W 赞 (n-1 表示利用 n-1时刻滤波器权系数对期望响应 d(n 作的一个估计, 所以称为先验估计误差.2. 2R LS 算法实现①初始化:W 赞 (0 =0, R -1(0 =δ-1I , δ是一个正常数②对于每一个时刻n=1, 2, … , 进行如下计算:y(n =W T(n-1 X (ne(n =d(n -y(nK (n =R -1(n-1 X (nα(n =d(n -X T (n W 赞 (n-1R -1(n =λ-1[R -1(n-1 -K (n X T (n R -1(n-1 ]W 赞 (n =W 赞 (n-1 +K (n α(n这样, 就用 R -1(n 的递归运算来取代了矩阵反演运算[X T (n X (n ]-1. 其中, δ是正则化参数, δ的设定与信噪比有关, 正则化参数δ与信噪比的关系己由 M oust a-ki des (1997 给出详细说明.3RLS 自适应滤波器 M 文件的设计与仿真根据前面介绍的 R LS 算法, 用 M A TLA B 设计 R LS 自适应滤波器. 下面将在M A TLA B 环境中编写 M 文件对 R LS 算法进行设计和仿真, 验证算法的可行性.在 M A TLA B 中编写 M 文件 R LS. m , 其中, 各参数的意义如下:s:标准正弦信号, 最大峰值为 m axV p=1. 00.sn:标准信号叠加标准白噪声(最大峰值为 m axV p=3. 94 . st ep:滤波器指数加权因子λ, 取值为 0. 99.W (n :滤波器的权向量序列.en:s(i 信号减去滤波器输出信号后得到的误差信号. N :时域抽头 R LS 算法滤波器阶数, 取值为 128.dl en:输入信号抽样点数, 取值为 1024.del t a:正则化参数δ, 取值为 0. 001.R LS 算法中各向量的更新表达式在 M 文件中的实现代码为:f or n=N :dl en;u=sn((n :-1:(n-N +1 ;v=p*u' ;k=v/(st ep+u*v ;y(n =u*w;e(n =s(n -y(n ;w=w+k*conj (e(n ;p=(1/st ep *(eye(N -k*u *p;end仿真时, 原始信号选为 si n((0. 05*pi *t , 其中 t =1:dl en, 噪声信号采用标准白噪声, 在 M A TLA B 环境中运行 R LS. m 文件, 调用绘图函数, 得到 R LS 算法的仿真结果如图 1. R LS 算法的均方误差曲线如图 2所示.4结束语R LS 算法具有良好的收敛速度,除收敛速度快于 LM S 算法以及稳定性强外, 而且具有更高的起始收敛速度、更小的权噪声和更大的抑噪能力.———————————————————参考文献 :〔 1〕么晖 . 基于 FPGA 的自适应滤波器设计 [D]. 硕士学位论文 . 北京 :航天科工集团第三研究院 , 2005.〔 2〕黄埔堪 , 陈建文 , 楼生强 . 现代数字信号处理 [M]. 北京 :电子工业出版社 , 2003.〔 3〕龚耀寰 . 自适应滤波器 [M]. 北京 :电子工业出版社 , 1989. 〔 4〕韩利竹 . MATLAB 电子仿真与应用 [M]. 北京 :国防工业出版社 , 2001.〔 5〕王立宁 , 乐光新 . MATLAB 与通信仿真 [M]. 北京 :人民邮电出版社 , 2000.〔 6〕 Simon Haykin . Adaptive Filter Thearo[M]. 北京 :电子工业出版社 , 2006.图 2R LS算法的均方误差曲线图 1R LS 算法的输入和输出曲线26 --。
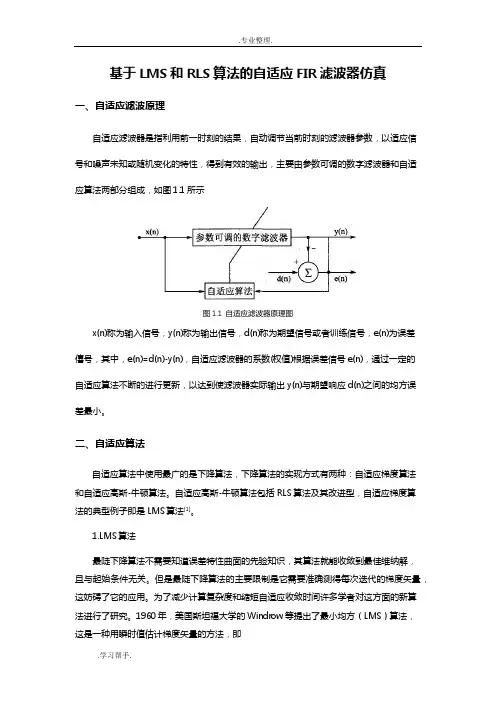
基于LMS和RLS算法的自适应FIR滤波器仿真一、自适应滤波原理自适应滤波器是指利用前一时刻的结果,自动调节当前时刻的滤波器参数,以适应信号和噪声未知或随机变化的特性,得到有效的输出,主要由参数可调的数字滤波器和自适应算法两部分组成,如图1.1所示图1.1 自适应滤波器原理图x(n)称为输入信号,y(n)称为输出信号,d(n)称为期望信号或者训练信号,e(n)为误差僖号,其中,e(n)=d(n)-y(n),自适应滤波器的系数(权值)根据误差信号e(n),通过一定的自适应算法不断的进行更新,以达到使滤波器实际输出y(n)与期望响应d(n)之间的均方误差最小。
二、自适应算法自适应算法中使用最广的是下降算法,下降算法的实现方式有两种:自适应梯度算法和自适应高斯-牛顿算法。
自适应高斯-牛顿算法包括RLS算法及其改进型,自适应梯度算法的典型例子即是LMS算法[1]。
1.LMS算法最陡下降算法不需要知道误差特性曲面的先验知识,其算法就能收敛到最佳维纳解,且与起始条件无关。
但是最陡下降算法的主要限制是它需要准确测得每次迭代的梯度矢量,这妨碍了它的应用。
为了减少计算复杂度和缩短自适应收敛时间许多学者对这方面的新算法进行了研究。
1960年,美国斯坦福大学的Windrow等提出了最小均方(LMS)算法,这是一种用瞬时值估计梯度矢量的方法,即2[()]()2()()()e n n e n x n w n ∧∂∇==-∂ 可见,这种瞬时估计法是无偏的,因为它的期望值E[)(n ∇∧]确实等于矢量)(n ∇。
所以,按照自适应滤波器滤波系数矢量的变化与梯度矢量估计的方向之间的关系,可以先写出LMS 算法的公式如下:1(1)()[()]()()()2w n w n n w n e n x n μμ∧∧∧∧+=+-∇=+ 将式e(n)=d(n)-y(n)和e(n)=d(n)-w H x(n)代入到上式中,可得到(1)()()[()()()][()()]()()()HH w n w n x n d n w n x n I x n x n w n x n d n μμμ∧∧∧∧+=+-=-+图2.1 自适应LMS 算法信号流图由上式可以得到自适应LMS 算法的信号流图,这是一个具有反馈形式的模型,如图2-1所示。
RLS算法自适应去噪一,引言:我们组研究的题目是《RLS均衡算法及应用》,主要是其在自适应噪声消除中的应用。
在目前的移动通信领域中,克服多径干扰,提高通信质量是一个非常重要的问题,特别是当信道特性不固定时,这个问题就尤为突出,而自适应滤波器的出现,则完美的解决了这个问题。
其核心便是自适应算法,RLS算法便是其中的一种。
我们组主要了解了下RLS算法的基本原理,以及用程序实现了用RLS算法自适应消除语音信号中的噪声。
我们知道语音识别技术很难从实验室走向真正应用很大程度上受制于应用环境下的噪声. 自适应信号处理的理论和技术经过40 多年的发展和完善,已逐渐成为人们常用的语音去噪技术。
本文正是想通过这一与我们生活相关的问题,对简单的语音噪声进行消除,更加深刻地了解RLS算法。
二,算法原理:RLS算法即递规最小二乘算法,对于如下图所示的自适应横向滤波器:RLS算法的基本思想是:给定n-1次迭代滤波器抽头权向量最小二乘估计,依据新到达的数据计算n次迭代权向量的最新估计。
递规最小二乘算法利用二乘方的平均最小化准则,即使得误差的平方和最小。
依这一准则我们可以得出方程组:11(1)()()1(1)()H P n U n k n U P n U n λλ---=+- (1)11()(1)()()(1)HP n P n K n U n P n λλ--=--- (2)*()(1)[()()(1)]Hw n w n k d n U n w n =-+--*(1)()()w n K n n ξ=-+ (3)*()()(1)H n d n U w n ξ=--()(1)()H d n W n U n =-- (4)(1),(2),(3),(4)式即组成了RLS 算法。
(4)式描叙了该算法的滤波过程,据次激励横向滤波器以计算先验估计误差()n ξ。
(3)式描述了该算法的自适应过程,据次可通过在其过去的基础上增加一个量来递推抽头权向量,该量等于先验估计误差()n ξ复共轭与时变增益向量k (n )的乘积。
基于RLS算法自适应滤波器
1. 介绍
RLS(Recursive Least Squares)算法是一种常用的自适应滤波器算法,它的主要目的是在不断变化的环境下跟踪复杂的输入/输出关系,实现最小误差估计。
它具有良好的追踪能力和稳定性,因此在许多场合中被广泛采用。
RLS算法通过对滤波器的状态变量应用递归的最小二乘算法,从而使得滤波器具有自适应能力,以追踪输入/输出关系的变化。
RLS算法不仅可以改善滤波器的收敛特性,而且可以有效地减少滤波器的噪声抑制性能,使其获得优良的性能。
2. RLS算法
RLS算法是一种迭代式算法,用于更新滤波器参数,使滤波器能够跟踪系统的动态变化。
RLS算法的基本步骤如下:
(1)对低阶系统的响应曲线进行拟合,并得到不同参数的初始估计值;
(2)计算输入/输出残差并进行加权和;
(3)更新滤波器参数以最小化输入/输出残差;
(4)根据更新的滤波器参数重新计算输入/输出残差;
(5)重复执行以上步骤,直至滤波器参数收敛。
3. RLS算法的优点
RLS算法具有很多优点:
(1)收敛速度快:RLS算法可以迅速收敛,不会因为系统模型变化而陷入局部极小值,并且可以很快适应新的环境。
RLS 和LMS 自适应算法分析摘要:本文主要介绍了自适应滤波的两种算法:最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法。
我们对这两种基本的算法进行了原理介绍,并进行了Matlab 仿真。
通过仿真结果,我们对两种自适应算法进行了性能分析,并对其进行了比较。
用Matlab 求出了LMS 自适应算法的权系数,及其学习过程曲线,和RLS 自适应权系数算法的学习过程。
关键词:自适应滤波、LMS 、RLS 、Matlab 仿真Abstract: this article mainly introduces two kinds of adaptive filtering algorithms: Least Mean square (LMS), further Mean Squares) and Recursive Least Squares (RLS, Recursive further Squares) two basic adaptive algorithm. Our algorithms of these two basic principle is introduced, and Matlab simulation. Through the simulation results, we have two kinds of adaptive algorithm performance analysis, and carries on the comparison. Matlab calculate the weight coefficient of the LMS adaptive algorithm, and its learning curve, and the RLS adaptive weight coefficient algorithm of the learning process.Keywords:, LMS and RLS adaptive filter, the Matlab simulation课题简介:零均值、单位方差的白噪声通过一个二阶自回归模型产生的AR 过程。
RLS和LMS自适应算法分析RLS (Recursive Least Squares) 和 LMS (Least Mean Squares) 是两种常见的自适应滤波算法。
它们在信号处理、通信系统和自适应控制等领域得到广泛应用。
本文将对这两种算法进行分析比较。
首先,我们来看看RLS算法。
RLS算法使用最小均方误差准则来自适应调整滤波器系数。
它利用递归方式计算出均方误差的最小值。
RLS算法基于Wiener-Hopf方程,通过解析方法来计算最优系数。
这种方法计算量较大,但是提供了更好的性能。
RLS算法根据观测数据和期望输出之间的误差信号来不断调整滤波器的权重,并且在递归过程中更新这些权重。
相比于LMS算法,RLS算法具有更快的收敛速度和更高的精度。
但是,RLS 算法也存在一些问题,比如计算复杂度高、存储要求大以及对噪声和系统不确定性敏感。
接下来,我们来看看LMS算法。
LMS算法是一种基于随机梯度下降的自适应算法。
在LMS算法中,滤波器的系数通过逐步调整以减小误差标准差。
LMS算法利用误差信号和输入信号之间的乘积来更新滤波器系数。
这种算法简单易于实现,计算复杂度低,并且对存储要求不高。
LMS算法适用于非平稳环境下的自适应滤波问题。
然而,LMS算法的收敛速度较慢,需要一定的迭代次数才能达到最优解,而且对于高阶滤波器,可能存在稳定性问题。
此外,LMS算法对输入信号的统计特性有一定的要求。
综上所述,RLS算法和LMS算法都是常见的自适应滤波算法,它们在不同的应用领域有不同的适用性和特点。
RLS算法在计算复杂度和存储要求上较高,但是具有更快的收敛速度和更高的精度。
LMS算法计算复杂度低,存储要求小,但是收敛速度较慢。
一般情况下,对于较小的系统和较简单的滤波器,可以使用LMS算法,而对于复杂的系统和高阶滤波器,可以使用RLS算法。
在实际应用中,需要根据具体的要求和约束来选择合适的算法。
此外,还可以根据实时计算需求和系统资源限制等因素,对RLS 和LMS算法进行优化和改进,如考虑快速RLS算法和正则化LMS算法等。


基于LMS算法与RLS算法的自适应滤波徐艳;李静【期刊名称】《电子设计工程》【年(卷),期】2012(020)012【摘要】The theory and technology of adaptive signal processing have become popular in filtering and canceling noise field. This article mainly talks about the theory of adaptive filtering and steps of the arithmetic based on LMS&RLS.Emulations successfully showed the theory by MATLAB in this paper.%自适应信号处理的理论和技术已经成为人们常用滤波和去噪技术。
文中讲述了自适应滤波的原理以及LMS算法和RLS算法两种基本自适应算法的原理及步骤。
并用MATLAB分别对两种算法进行了自适应滤波仿真和实现。
【总页数】4页(P49-51,54)【作者】徐艳;李静【作者单位】长安大学信息工程学院,陕西西安710064;长安大学信息工程学院,陕西西安710064【正文语种】中文【中图分类】TP312【相关文献】1.基于LMS算法与RLS算法自适应滤波及仿真分析 [J], 马国栋;阎树田;贺成柱;杨晨2.基于RLS算法的自适应抗干扰工频通信滤波器的设计与实现 [J], 徐婷;通旭明3.基于qF-LMS算法的自适应滤波器与FPGA实现 [J], 丁泽锋; 白路阳; 杨炜毅; 王艳芬4.基于LMS算法的自适应滤波器性能分析 [J], 刘建涛;席闯;姜海洋5.基于RLS算法的有源滤波器自适应基波检测方法(英文) [J], 姜孝华;金济;Ale Emedi因版权原因,仅展示原文概要,查看原文内容请购买。
自适应滤波LMS算法及RLS算法及其仿真1.引言2.自适应滤波LMS算法LMS(Least Mean Square)算法是一种最小均方误差准则的自适应滤波算法。
其基本原理是通过不断调整滤波器的权值,使得输出信号的均方误差最小化。
LMS算法的迭代公式可以表示为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)为滤波器的权值向量,μ为步长因子,e(n)为误差信号,x(n)为输入信号。
通过迭代更新权值,LMS算法逐渐收敛,实现了自适应滤波。
3.RLS算法RLS(Recursive Least Square)算法是一种递归最小二乘法的自适应滤波算法。
相比于LMS算法,RLS算法具有更好的收敛性能和适应性。
RLS算法基于最小二乘准则,通过递归式地计算滤波器权值矩阵,不断优化滤波器的性能。
迭代公式可以表示为:P(n)=(P(n-1)-P(n-1)*x(n)*x(n)'*P(n-1)/(λ+x(n)'*P(n-1)*x(n))) K(n)=P(n)*x(n)/(λ+x(n)'*P(n)*x(n))w(n+1)=w(n)+K(n)*e(n)其中,P(n)为滤波器的协方差矩阵,K(n)为最优权值,λ为遗忘因子(用于控制算法的收敛速度),e(n)为误差信号。
4.仿真实验为了验证LMS算法和RLS算法的性能,我们进行了一组仿真实验。
假设输入信号为一个正弦信号,噪声为高斯白噪声。
我们分别使用LMS和RLS算法对输入信号进行自适应滤波,比较其输出信号和原始信号的均方误差。
在仿真中,我们设置了相同的滤波器长度和步长因子,比较LMS和RLS算法的收敛速度和输出质量。
实验结果表明,相对于LMS算法,RLS 算法在相同条件下具有更快的收敛速度和更低的均方误差。
这验证了RLS 算法在自适应滤波中的优越性。
5.结论本文介绍了自适应滤波LMS算法和RLS算法的原理及其在仿真中的应用。
实验结果表明,相对于LMS算法,RLS算法具有更好的收敛性能和适应性。
RLS算法自适应去噪RLS(Recursive Least Squares)算法是一种自适应滤波算法,主要用于信号去噪。
它采用递归最小二乘方法,根据当前的观测数据和过去的滤波误差,进行参数估计和滤波操作。
下面将详细介绍RLS算法的原理和应用。
具体来说,RLS算法通过以下步骤实现自适应去噪:1.初始化滤波器参数以及协方差矩阵:首先需要初始化滤波器的参数向量w和协方差矩阵P。
通常初始值设置为零向量和一个较大的对角阵。
2.递归计算增益系数向量K:根据当前的输入信号和滤波器参数,计算增益系数向量K。
K的计算可以通过协方差矩阵和输入信号的自相关函数来实现。
3.更新滤波器参数:利用增益系数向量K和当前输入信号的误差,更新滤波器参数向量w。
4.更新协方差矩阵:根据增益系数向量K和协方差矩阵的递推关系,更新协方差矩阵P。
5.返回滤波输出:利用更新后的滤波器参数向量w和输入信号,计算滤波输出。
在信号去噪方面,RLS算法可以用于消除各种类型的噪声,如白噪声、高斯噪声、窄带噪声等。
同时,通过合适的参数选择和观测数据的处理,RLS算法还可以提高信号的信噪比。
然而,RLS算法也存在一些限制。
首先,它的计算复杂度较高,尤其是当输入信号较大时。
其次,对于非平稳信号,RLS算法的性能可能会下降。
此外,参数的选择也可能会对算法的性能产生影响。
为了解决RLS算法在大规模输入信号和非平稳信号处理方面的问题,研究者们提出了各种改进的RLS算法。
例如,基于模型的RLS算法可以通过考虑信号的统计特性来改进滤波性能。
另外,基于增量的RLS算法可以减少计算复杂度,适用于大规模信号处理。
总结起来,RLS算法是一种自适应滤波算法,可以实现信号的去噪操作。
它通过递归地更新滤波器参数和协方差矩阵,根据最小均方误差准则进行信号估计和滤波处理。
尽管RLS算法存在一些限制,但通过改进和优化,它仍然是一种有效的信号去噪方法。
RLS和LMS自适应算法分析RLS(Recursive Least Squares)和LMS(Least Mean Square)是两种常用的自适应滤波算法,用于实时信号处理和系统辨识。
本文将对这两种算法进行详细的分析。
1.RLS算法:RLS算法是一种基于权值的算法,用于实时估计系统的参数。
其基本思想是通过最小化误差平方和,更新滤波器的权值。
具体算法步骤如下:a.初始化滤波器权值和协方差矩阵。
b.输入新的观测值,并计算滤波器输出。
c.根据观测值和滤波器输出的误差,更新滤波器的权值和协方差矩阵。
d.重复步骤b和步骤c,直到滤波器收敛。
RLS算法的优点是收敛速度快,能够较快地适应系统的变化。
同时,由于使用了协方差矩阵更新权值,能够更好地抑制噪声。
2.LMS算法:LMS算法是一种基于梯度下降的算法,也是一种最小均方误差(Mean Square Error,MSE)的自适应算法。
具体算法步骤如下:a.初始化滤波器权值。
b.输入新的观测值,并计算滤波器输出。
c.根据观测值和滤波器输出的误差,更新滤波器的权值。
d.重复步骤b和步骤c,直到滤波器收敛。
LMS算法的优点是计算简单,实现容易。
然而,由于是一种基于梯度下降的算法,其收敛速度相对较慢,并且对于高维信号处理时存在着性能损失的问题。
3.RLS算法与LMS算法的比较:a.计算复杂度:RLS算法的计算复杂度较高,需要对协方差矩阵进行计算和更新,而LMS算法的计算复杂度较低,只需要进行简单的权值更新。
b.收敛速度:RLS算法的收敛速度较快,能够较快地适应变化的系统;而LMS算法的收敛速度相对较慢。
c.稳定性:RLS算法对于数据的不确定性比较敏感,误差的扩散效应较小;而LMS算法存在着误差累积的问题。
根据相关应用需求,选择合适的自适应算法。
如果需要较快地适应系统的变化,并能较好地抑制噪声,可以选择RLS算法;而如果需要计算简单、实现容易,且对于系统的适应速度要求较低,可以选择LMS算法。
RLS 自适应滤波一、RLS 自适应算法最小二乘(LS)法是一种典型的有效的数据处理方法,既可用于静态系统,又可用于动态系统:既可用于线性系统,又可用于非线性系统;既可用于离线估计,又可用于在线估计。
递归最小二乘(Recursive Least Square ,RLS)是最小乘法的一种快速算法,它包含时间递归最小二乘(TRLS)算法和阶数递归最小二乘(ORES)算法两方面内容,一般前者适用于动态系统辨识和在线估计,后者适用于静态系统辨识和离线估计。
与LMS 算法相比,RLS 算法有着非常快的收敛速度。
在快速收敛算法的推导中,我们采用最小二乘法。
因此,将直接处理接收数据,使二次性能指数最小,而以前是使平方误差的期望值最小。
这意味着,用时间平均而不是统计平均来表示性能指数。
基于时间平均的最小平方误差被定义如下:()21)(i e n J in ni -=∑=λ(1)式中,λ是接近1,但是小于1的加权因子,称作遗忘因子。
其中估计误差定义为()()())(i x n w i d i e H-= n i ≤≤0 (2)且()()()()[]TN i x i x i x i x 1,,1,+--= (3)式中,x(i)是i 时刻的输入数据向量,w(n)是n 时刻的新的抽头增益向量。
因而e(i)是用n 时刻的抽头增益向量测试i 时刻的旧数据所得的误差,J(n)是在所有旧数据上用新抽头增益所得的累计平方误差。
要完成RLS 算法就要找到均衡器的抽头增益向量w(n),使得累计平方误差J(n)最小。
为了测试新的抽头增益向量,会用到那些先前的数据。
而因子λ会在计算时更依赖于新近的数据,也就是说,J(n)会丢掉非稳定环境中的较旧的数据。
如果信道是稳定的,那么λ可以设为1。
为了获得J(n)的最小值,可使J(n)的梯度为0,即()()0=∂∂n J n w ,通过运算可知:()()()n r n w n R =∧(4) 式中,()n w ∧是RLS 均衡其的最佳抽头增益向量。
rls 滤波器权重参数噪声是现代信号处理的一大问题,因为它可能导致误差,降低系统的性能和可靠性。
在数字信号处理中,滤波器是消除或降低噪声的一种常见方法。
其中一种常见的滤波器是基于最小二乘(RLS)算法的自适应滤波器。
RLS滤波器的参数是由称为权重的变量组成的向量。
这些权重用于基于输入和期望输出信号之间的误差来更新滤波器的输出。
权重的值可以通过最小化均方误差(MSE)的方法获得。
在RLS算法中,权重更新方程具有以下形式:w(k) = w(k-1) + K(k) * e(k) * x(k)其中,w(k)是滤波器的权重向量,e(k)是期望输出信号与实际输出信号之间的误差,x(k)是滤波器的输入信号,K(k)是一个可调整的参数。
K(k)的选择将影响滤波器的性能。
如果选择的K(k)太小,滤波器可能无法适应快速变化的输入信号;如果选择的K(k)太大,滤波器可能会出现过度适应或过拟合的问题。
因此,必须选择适当的K(k)值。
用于计算K(k)的公式是:其中,P(k-1)是预测误差协方差矩阵,lambda是一个小常数,用于避免矩阵的奇异性。
在RLS滤波器中,还可以使用拓展的加性方法,以进一步控制K(k)的选择,这样可以更有效地抑制噪声。
该方法将K(k)定义为以下形式:其中,epsilon是一个小值,用于防止矩阵的奇异性。
此外,可以使用一个称为遗忘因子的参数来限制权重向量的更新速度,以避免过度适应或过拟合的问题。
在实际应用中,RLS算法经常被用于多种信号处理应用,例如语音增强、音频降噪和自适应控制等。
在这些应用中,选择适当的权重和参数是确保系统性能和可靠性的关键。
因此,在应用RLS滤波器之前,需要仔细评估系统的要求,并进行有效的参数选择。
rls滤波器权重参数RLS (Recursive Least Squares) 滤波器是一种自适应滤波器,用于估计滤波器的权重参数。
它通过不断更新这些权重参数来逐渐逼近理想响应。
RLS滤波器的权重参数具有很大的灵活性,可以根据实际应用需求进行调整。
在以下情况下,我们需要定义和调整RLS滤波器的权重参数:1.实时信号处理:RLS滤波器通常用于实时信号处理任务,如语音处理、图像处理等。
在这些任务中,信号往往是时变的,因此权重参数需要具备对变化信号的适应能力。
2.滤波器稳定性:权重参数的稳定性对滤波器性能至关重要。
如果权重参数过于不稳定,可能会导致滤波器输出出现剧烈波动。
因此,调整权重参数以保持滤波器的稳定性是很重要的。
3.滤波器性能要求:不同应用场景对滤波器的性能有不同要求,如信噪比、时延、抖动等。
权重参数的选择可以直接影响滤波器的性能,因此需要根据实际需求进行调整。
常见的RLS滤波器权重参数包括:1. Forgetting Factor (FF): 遗忘因子是控制滤波器对历史数据的权重衰减速度的参数。
较大的遗忘因子使滤波器对历史数据逐渐遗忘,适合用于处理非平稳信号;较小的遗忘因子使滤波器对历史数据长时间记忆,适合用于处理平稳信号。
2. Initial Covariance (P): 初始协方差矩阵用于估计权重参数的不确定度。
较大的初始协方差矩阵意味着权重参数的初始估计值不确定,会加快权重参数的收敛速度;较小的初始协方差矩阵意味着权重参数的初始估计值可信度高,会减缓权重参数的收敛速度。
3. Regularization (lambda): 正则化项用于控制滤波器的复杂度,并避免过拟合。
较小的正则化参数会使权重参数更接近理想值,但可能导致过拟合;较大的正则化参数会使权重参数偏离理想值,但能更好地适应噪声。
4. Step Size (mu): 步长参数用于控制权重参数的更新速度。
较大的步长参数会加快权重参数的收敛速度,但容易导致不稳定;较小的步长参数会减缓权重参数的收敛速度,但能更好地保持稳定性。
基于RLS算法自适应滤波器的设计摘要自适应滤波器是统计信号处理的一个重要组成部分。
在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此需要研究自适应滤波器。
凡是需要处理未知统计环境下运算结果所产生的信号或需要处理非平稳信号时,自适应滤波器可以提供非自适应方法所不可能提供的新的信号处理能力。
而且其性能通常远优于用常方法设计的固定滤波器。
本文从自适应滤波器研究的意义入手,介绍了自适应滤波器的基本理论思想,具体阐述了自适应滤波器的基本原理、算法及设计方法。
自适应滤波器的算法是整个系统的核心。
对 RLS算法自适应滤波器做了详细的介绍,采用改进的RLS算法设计自适应滤波器,并采用MATLAB进行仿真,通过实验结果来体现该滤波器可以根据信号随时修改滤波参数,达到动态跟踪的效果,使滤波信号更接近于原始信号。
关键词:自适应滤波器,RLS算法,噪声消除,FIR第1章绪论1.1 课题研究意义和目的滤波技术是信号处理中的一种基本方法和技术,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。
对自适应滤波算法的研究是当今自适应信号处理中最为活跃的研究课题之一。
Windrow等于1967年提出的自适应滤波系统的参数能自动的调整而达到最优状况,而且在设计时,只需要很少的或根本不需要任何关于信号与噪声的先验统计知识。
这种滤波器的实现差不多像维纳滤波器那样简单,而滤波器性能几乎如卡尔曼滤波器一样好。
自适应滤波器与普通滤波器不同,它的冲激响应或滤波参数是随外部环境的变化而变化的,经过一段自动调节的收敛时间达到最佳滤波的要求。
自适应滤波器本身有一个重要的自适应算法,这个算法可以根据输入、输出及原参量信号按照一定准则修改滤波参量,以使它本身能有效的跟踪外部环境的变化。
因此,自适应数字系统具有很强的自学习、自跟踪能力和算法的简单易实现性。
自适应滤波技术的核心问题是自适应算法的性能问题,提出的自适应算法主要有最小均方(LMS)算法、递归最小二乘(RLS)算法及相应的改进算法如:归一化(NLMS)算法、变步长(SVSLMS)算法、递归最小二乘方格形(RLSL)算法等。
这些算法各有特点,适用于不同的场合。
研究自适应算法是自适应滤波器的一个关键内容。
递归最小二乘(RLS)算法是线性自适应滤波算法中最基本的两类算法之一,由于基于LMS准则的自适应滤波算法的收敛速度通常较慢,有些在调整过程种的延时也较大。
为了克服LMS的算法,我们采用在每个时刻对所有已输入信号重估的平方误差之和最小这样的准则,即RLS算法。
RLS算法复数乘法正比于2k,使其自适应速度更快。
目前应用最多的是系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测、自适应天线阵等诸多领域。
1.2 国内外研究发展状况自适应滤波的基本理论通过几十年的发展已日趋成熟,近十几年来自适应滤波器的研究主要针对算法与硬件实现。
算法研究主要是对算法速度和精度的改进,其方法大都采用软件C、MATLAB等仿真软件对算法的建模和修正。
通常,自适应滤波器的硬件实现都是用DSP通用处理器(如TI的TMS320系列)。
DSP器件采用改进的哈佛结构,具有独立的程序和数据空间,允许同时存取程序和数据,内置高速的硬件乘法器(MAC),增强的多级流水线。
DSP具有的硬件乘法模块(MAC),专用的存储器以及适用于高速数据运行的总线结构,使DSP器件具有高速的数据运算能力。
目前,用DSP器件处理数字信号已经成为电子领域的研究热点。
在自适应信号处理领域,对于数据处理速度在几兆赫兹以内的,通用DSP 器件也是首选。
迟男等人在TMS320C32芯片上扩展EPROM和RAM,实现了30阶LMS自适应滤波器,使用的刀D转化器件为AD1674,最高采样频率为l00KHz。
陆斌等人采用TMS320C30数字信号处理器与IMSA110专用滤波器并行处理的方法设计出了自适应滤波器并应用于直接序列的扩频接收系统1221。
赵慧民等人在TMS320C31上实现了自适应权向量滤波器,完成了信号采样频率为80KHz的自适应滤波。
在数据处理速度只要求在几兆赫兹以内的应用场合,这些用DSP实现的自适应滤波器能很好的满足系统实时的需求。
在这种需求场合下,DSP具有不可媲美的性价比。
但是随着信息化的进程加快和计算机科学与技术、信号处理理论与方法等的迅速发展,需要处理的数据量越来越大,对实时性和精度的要求越来越高。
以迅速发展的移动通信技术为例,从IG时代只能传送语音的模拟通信,到2G时代的传送语音和数据的GSM、TDMA与CDMA1595,到2.5G时代传送语音、数据、图片、彩信MMS、简短视频、收发E-mail、网页浏览等的GPRS与CDMA2000lX,到目前正处于研发与测试阶段的能够传送图像、音乐、视频流等多种媒体形式,提供包括网页浏览、电话会议、电子商务的3G通信,以及目前正在研发与憧憬中的能够传送高质量流畅的视频流与多种实时流媒体业务的4G通信。
常用的数字系统目标器件除了DSP处理器外还有专用集成电路(ASIC)、专用标准电路模块(ASSP)和现场可编程门阵列(FPGA)。
ASIC和ASSP是专门针对完成某种数字信号处理算法的集成电路器件,因此其在性能指标、工作速度、可靠性和成本上优于DSP处理器。
其优秀的工作性能主要源于特定的算法全部由ASSP和ASIC中的硬件电路完成。
ASSP是半定制集成电路,在许多DSP算法的实现方面都优于DSP(数字信号处理器),但在功能重构,以及应用性修正方面缺乏灵活性;ASIC专用集成电路使用超大规模专用集成电路ASIC的实现方法是实用化的产品唯一可行的方法,只有使用IC,才有高可靠性和可接受的价格及体积功耗等。
ASIC虽然有一定的可定制性,但开发周期长,而且有一个最小定制量,在实验室研制开发阶段,开发成本非常高。
现代大容量、高速度的FPGA在可重配置的数字信号处理应用领域,特别是对于任务单一、算法复杂的前端数字信号处理运算,有独特的优势。
另外,FPGA所具有的大规模并行处理能力和可编程的灵活性使得设计的系统能获得极高的处理性能,并且能够适应日益变化的标准、协议和性能需求。
用FPGA实现自适应滤波器,国外起步比较早,发展也非常迅速。
Hesener A.于1996年提出了用FPGA实现自适应滤波器的设想,并在FPGA上实现了处理速度可达SM的8阶8位FIR滤波器。
Woolfries N.等人用FPGA 实现了自适应栈滤波器,并应用于图象处理。
Dawood A.等人用FPGA开发了自适应FIR滤波器并与DSP处理器方案进行了比较研究。
国内有一些关于自适应算法硬件实现的研究,但基本是针对自适应滤波器中的算法,如南开大学李国峰的博士论文用VHDL语言描述了正负数的运算问题和浮点数运算问题,完成了基于FIR 的LMS自适应滤波器的硬件设计与逻辑综合。
国防科学技术大学江和平等人讨论了自适应卡尔曼算法的简化,并完成了FPGA的设计。
同济大学梁甲华等人重点讨论了编码方法在FPGA的技术问题。
上海交通大学范瑜等人介绍了用VHDL语言实现并行延时LMS算法的自适应数字波束成形器的FPGA设计过程。
而针对自适应格型结构采用FPGA硬件实现的文献报导很少,国内中国科学技术大学王显洁等人通过采用流水线结构和运算单元分时复用,提高了运算速度,能够满足实时性预测编码要求。
1.3 本文研究思路与主要工作在信号的传播路径中以及在信号处理过程中,都会引入噪声。
噪声的引入影响了对真实信号的处理,有时候,较强的噪声会“遮盖”了信号,从而难以得到准确、稳定的真实信号。
噪声对信号的污染在绝大多数情况下是不可避免的,因而,对噪声的消除和抑制是信号处理中极其重要的工作。
在信号传输和处理过程中,最常见的噪声形式为白噪声、带限白噪声、高斯白噪声、瑞利分布白噪声。
RLS(Recursive Least square)自适应滤波器常常用于噪声消除器的构建,本文介绍了自适应滤波器原理,对RLS自适应算法进行分析,最后用MATLAB 对自适应滤波器进行了仿真和实现,并分析了该自适应滤波器的性能。
第2章 自适应滤波器理论基础2.1数字滤波器的基本概念凡是有能力进行信号处理的装置都可以称为滤波器。
如果滤波器的输入和输出均为离散信号,称该滤波器为数字滤波器。
当滤波器的输出信号为输入端的线性函数时,该滤波器称为线性滤波器,否则就称为非线性滤波器。
一个典型的数字滤波器的框图如图2.1所示。
图2.1 数字滤波器设输入信号为()n x ,输出信号为()n y ,该数字滤波器可用以下差分方程来表示:()∑∑-=-=---=1011)()(M i N i i i i n y b i n x a n y (2-1)式中i a ,i b 称为滤波器系数。
当0=i b 时,上式变为:()()∑-=-=10M i i i n x a n y (2-2)这种滤波器称为全零点滤波器。
如果0=i a ,0≠i b 时,则称为全极点滤波器或递归滤波器。
由上式,可知数字滤波器的传递函数为:()∑∑=--=-+=Mi ii M i iz b z a z H 1111 (2-3) 其单位冲击响应函数为:()()()z H z n h 1-= (2-4)()()()()()∑∞-∞=-=⊗=i i n x i h n x n h n y (2-5)如果当n <0时,有()n h =0,这样的滤波器系统称之为因果系统。
如果冲激响应函数是有限长的,即:()()⎩⎨⎧≤≤=e l s eN n n h n h ,00, (2-6) 则称此滤波器为有限冲激响应FIR(FiniteImpulseResponse)滤波器,否则,称之为无限冲激响应IIR(InfiniteImpulseResponse)滤波器。
如果()n h 满足如下条件:()()⎪⎭⎪⎬⎫<<=∑∞=C n h n n h n 00,0 (2-7) 则称此滤波器是因果的,并且是稳定的。
2.2 自适应滤波器的原理自适应滤波器由参数可调的数字滤波器和自适应算法两部分组成(如图2.2所示)。
参数可调数字滤波器可以是FIR 数字滤波器或IIR 数字滤波器,也可以是格型数字滤波器。
输入信号()n x 通过参数可调数字滤波器后产生输出信号(或响应) ()n y ,将其与参考信号(或称期望响应)()n d 进行比较,形成误差信号()n e 。
()n e (有时还要利用()n x )通过某种自适应算法对滤波器参数进行调整,最终使 ()n e 的均方值最小。
因此,自适应滤波器实际上是一种能够自动调整本身参数的特殊维纳滤波器。