平面连杆机构设计(1)
- 格式:ppt
- 大小:335.00 KB
- 文档页数:27
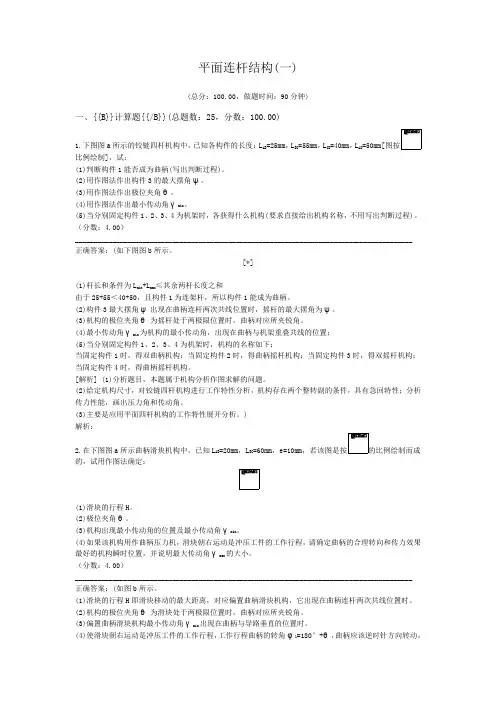
平面连杆结构(一)(总分:100.00,做题时间:90分钟)一、{{B}}计算题{{/B}}(总题数:25,分数:100.00)1.下图图a所示的铰链四杆机构中,已知各构件的长度:L AB=25mm,L BC=55mm,L CD=40mm,L AD=50mm[比例绘制],试:(1)判断构件1能否成为曲柄(写出判断过程)。
(2)用作图法作出构件3的最大摆角ψ。
(3)用作图法作出极位夹角θ。
(4)用作图法作出最小传动角γmin。
(5)当分别固定构件1、2、3、4为机架时,各获得什么机构(要求直接给出机构名称,不用写出判断过程)。
(分数:4.00)__________________________________________________________________________________________ 正确答案:(如下图图b所示。
[*](1)杆长和条件为L min+L max≤其余两杆长度之和由于25+55<40+50,且构件1为连架杆,所以构件1能成为曲柄。
(2)构件3最大摆角ψ出现在曲柄连杆两次共线位置时,摇杆的最大摆角为ψ。
(3)机构的极位夹角θ为摇杆处于两极限位置时,曲柄对应所夹锐角。
(4)最小传动角γmin为机构的最小传动角,出现在曲柄与机架重叠共线的位置;(5)当分别固定构件1、2、3、4为机架时,机构的名称如下:当固定构件1时,得双曲柄机构;当固定构件2时,得曲柄摇杆机构;当固定构件3时,得双摇杆机构;当固定构件4时,得曲柄摇杆机构。
[解析] (1)分析题目,本题属于机构分析作图求解的问题。
(2)给定机构尺寸,对铰链四杆机构进行工作特性分析,机构存在两个整转副的条件,具有急回特性;分析传力性能,画出压力角和传动角。
(3)主要是应用平面四杆机构的工作特性展开分析。
)解析:2.在下图图a所示曲柄滑块机构中,已知L AB=20mm,L BC=60mm,e=10mm的,试用作图法确定:(1)滑块的行程H。
机械原理平面连杆机构及设计平面连杆机构是一种最为基本的机械结构,由于其结构简单、运动可靠等特点,被广泛应用于各种机械设备中。
本文将对平面连杆机构进行介绍,并探讨其设计原理。
平面连杆机构是由至少一个定点和至少三个连杆组成的机构。
定点为固定参考点,连杆是由铰链连接的刚性杆件。
连杆可以分为连杆和曲柄,连杆连接在定点上,曲柄则旋转。
平面连杆机构的运动由这些连杆的位置和相互连接方式决定。
平面连杆机构的设计原理基于以下几个方面:1.运动分析:在设计平面连杆机构之前,首先需要进行运动分析,确定所需的运动类型。
运动类型可以是旋转、平移、摆动、滑动等。
通过运动分析,可以确定连杆的长度和相互连接的方式。
2.运动性能:平面连杆机构的优点是运动可靠,但运动性能也是需要考虑的重要因素。
例如,设计中需要考虑速度、加速度、力和力矩等参数,以满足机构的运动要求。
3.静力学分析:平面连杆机构在工作过程中可能会受到外力的作用,因此需要进行静力学分析。
静力学分析可以确定机构的力矩和应力,从而确定设计的合理性。
4.运动合成:在进行平面连杆机构的设计过程中,需要进行连杆的运动合成。
运动合成是指通过选择适当的连杆长度和连接方式,实现所需的运动类型。
5.运动分解:运动分解是指将合成的运动分解为各个连杆的运动。
通过运动分解,可以确定每个连杆的运动规律,从而进行设计。
当以上原理得到了充分的了解和运用后,可以进行平面连杆机构的具体设计。
具体的设计包括以下几个步骤:1.确定所需的运动类型:根据机械设备的需求,确定所需的运动类型,例如旋转、平移、摆动等。
2.运动分析:对机构进行运动分析,确定连杆的位置和连接方式。
根据机构的运动要求和外力作用,确定连杆的长度。
3.动力学分析:进行动力学分析,确定机构运动时的力学参数,如速度、加速度、力和力矩等。
4.运动合成与分解:根据所需的运动类型,进行运动合成和分解,确定连杆的运动规律。
5.结构设计:根据上述分析和计算结果,进行结构设计。
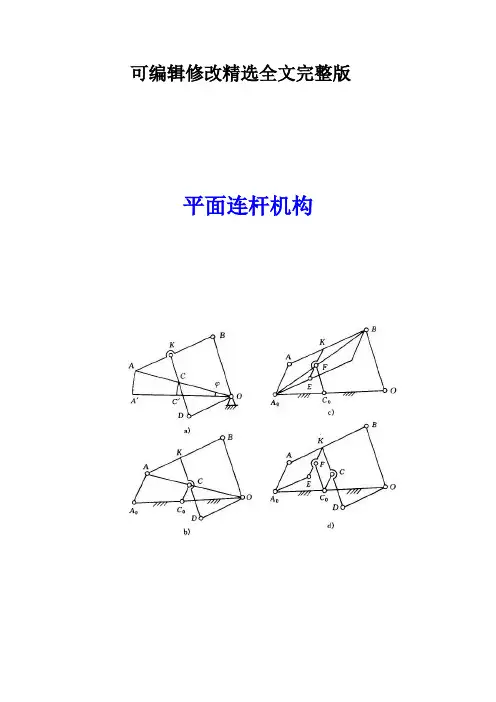
可编辑修改精选全文完整版平面连杆机构
1 平面四杆机构的类型
平面四杆机构可分为两类:
1.全转动副的平面四杆机构,称为铰链四杆机构;
2.含有移动副的平面四杆机构,如曲柄滑块机构。
1.1 铰链四杆机构的基本类型
铰链四杆机构的基本类型
类型判断
铰链四杆机构存在曲柄的条件:
(1)最短杆与最长杆的长度之和,小于或等于其余两杆长度之和;
(2)连架杆和机架中必有一个是最短杆。
根据上述曲柄存在条件可得以下推论:
①铰链四杆机构中,若最短杆与最长杆的长度之和小于或等于其余两杆长度之和,则
取最短杆的相邻杆为机架时,得曲柄摇杆机构;
取最短杆为机架时,得双曲柄机构;
取与最短杆相对的杆为机架时,得双摇杆机构。
②铰链四杆机构中,若最短杆与最长杆的长度之和大于其余两杆长度之和,则不论取何杆为机架时均无曲柄存在,而只能得双摇杆机构。
1. 曲柄摇杆机构
雷达
汽车前窗刮雨器
搅拌机
飞剪
2. 双曲柄机构
两连架杆均为曲柄的四杆机构称为双曲柄机构。
特殊:平行双曲柄机构(平行四边形机构)
机车车轮联动机构反平行四边形机构。
如公共汽车车门启闭机构。
公共汽车车门启闭机构3. 双摇杆机构
两连架杆均为摇杆的四杆机构称为双摇杆机构。
起重机。

平面连杆机构简化模型制作(2学时)
工具:
1、剪刀
2、壁纸刀
3、钢直尺
4、锥子(轧孔用)
5、打火机
6、铅笔、橡皮
消耗材料:
1、纸板
2、尼龙绳
3、透明胶带
知识目标:体会曲柄存在条件、死点、急回特性等知识点
能力目标:根据示意图制作模型
教学重点:巩固平面连杆机构知识点
教学难点:制作模型
教学方法:分组实验
曲柄连杆机构示意图图:
制作步骤:
1、在纸板上划线,确定四个杆件尺寸。
推荐尺寸宽度均为10mm;长度(括号
内为孔心距),A1杆55(45)mm,A2杆110(100)mm,A3杆80(70)mm,A4杆130(120)mm;B1杆60(50)mm,B2杆110(100)mm,B3杆80(70)mm,B4杆100(90)mm。
注意合理下料。
2、按线剪切各杆。
3、按尼龙绳直径用锥子打铰链孔。
4、用尼龙绳依次铰接各杆,打火机烤软固定两端。
注意用笔端按压,避免烫伤
手指。
5、选择合适的杆件用胶带粘贴较大的纸板上作机架,分别形成不同类型机构。

第章平面连杆机构及其设计1. 介绍平面连杆机构是机械运动学中一类常见的重要机构,由连杆(也称杆件)组成,分为接触连杆机构和非接触连杆机构两类。
平面连杆机构能够将旋转运动转化为直线运动,或将直线运动转化为旋转运动,并广泛应用于各种机械装置中。
2. 平面连杆机构的分类平面连杆机构一般分为以下几类:2.1 四杆机构四杆机构是由四根杆件组成的平面连杆机构,其中两根杆件为引导杆,在机构运动过程中仅仅进行直线运动,另外两根杆件则为连杆,在机构运动过程中发生旋转和直线运动。
2.2 三杆机构三杆机构又称三杆架,是由三根杆件组成的平面连杆机构,其中两根杆件为引导杆,在机构运动过程中仅仅进行直线运动,另外一根杆件则为连杆,在机构运动过程中发生旋转和直线运动。
2.3 双曲杆机构双曲杆机构是由两个连杆组成的平面连杆机构,其中两个连杆的运动轨迹呈现为双曲线形状,能够实现近似于直线的直线运动。
2.4 齿条机构齿条机构是由齿轮和齿条组成的平面连杆机构,齿轮进行旋转运动,齿条进行直线运动,能够实现运动传递和位置定位。
3. 平面连杆机构的设计设计平面连杆机构时需要考虑以下几方面:3.1 运动要求平面连杆机构的设计需要优先考虑机构所要完成的工作,确定所需运动方式、速度、角度等指标,为机构的设计提供技术参考和方向。
3.2 相关构件尺寸在完成运动要求的基础上,需考虑各组件之间的相互匹配,包括连杆长度、引导杆长度、连杆夹角、引导杆倾斜角等。
3.3 材质选取平面连杆机构在耐用性、强度、重量、成本等方面也需要考虑,选用合适的材质,满足机构设计要求。
3.4 连接方式选择平面连杆机构的连接方式通常为销轴连接和螺栓连接,选择合适的连接方式也是机构设计的关键。
4.平面连杆机构是机械装置中常见的一种机构结构,应用广泛,设计时需考虑机构所要完成的工作、构件尺寸、材质选取和连接方式选择等方面,结合实际情况进行设计,才能满足机构的运动要求和性能要求。
机械基础第七章平面连杆机构(1)导学案【学习目标】1.联系日常生活和工作实践,能说出平面铰链四杆机构的概念及其特点。
2.利用铰链四杆机构示教板,能记住铰链四杆机构各组成部分及其含义。
3.掌握铰链四杆机构的三种基本类型含义及其机构运动分析。
【重点难点】1.铰链四杆机构各组成部分及其含义。
2.铰链四杆机构的三种基本类型含义及其机构运动分析。
【使用说明与学法指导】1.依据学习目标,结合导学案中的问题提示,认真研读教材82~87页,回答相关问题,解答完有关题目。
2.要求每个同学认真预习,认真勾画课本并作批注,不明白的问题用红色笔画出。
3.学科班长在晚自习后收齐导学案,要统计好没交上的同学的名字。
【课前自学】1.平面连杆机构是由一些刚性构件用或相互连接而组成的,在同一平面或运动的机构。
平面连杆机构中都是。
2.构件间用四个转动副相连的平面四杆机构,成为。
3.曲柄摇杆机构、双曲柄机构和双摇杆机构的定义?各举几个实例。
【合作探究】1.小组讨论,试举出生产实习或日常生活中,书上没有的铰链四杆机构应用实例。
主备人:张鹏审阅人:时间:2.分析讨论不等长双曲柄机构、平行双曲柄机构和反向双曲柄机构的运动特点?3.画出并分析起重机机构的运动简图?【巩固训练】1.铰链四杆机构有三种基本形式,即机构以及机构和机构。
2.通常我们把曲柄摇杆机构中的曲柄和连杆叫做连架杆。
()3.铰链四杆机构的两个连架杆中,其中一个是曲柄,另一个是的称为曲柄摇杆机构。
4.铰链四杆机构的两个连架杆中均为的称为双摇杆机构。
【我的收获】【我的反思】【课下作业】课本P87练习1、2、3。
机械原理与设计平面连杆机构引言连杆机构是机械工程中非常重要的一类机构,广泛应用于各种机械装置中。
平面连杆机构是其中最简单、常见的一种连杆机构。
本文将介绍机械原理与设计平面连杆机构的基本概念、工作原理及设计要点。
一、连杆机构的基本概念连杆机构是指由刚性杆件连接而成的机械系统,它具有一定的自由度和特定的运动特性。
平面连杆机构是指所有杆件均在同一平面内运动的连杆机构。
平面连杆机构由连杆、铰链和主动副组成。
连杆:连杆是连接其他杆件的刚性杆件,具有一定的长度和形状。
铰链:铰链是连接连杆的关节,它允许连杆相对旋转,保持一定的约束。
主动副:主动副是指能够驱动整个机构运动的关节,通常由电机或气动装置驱动。
二、平面连杆机构的工作原理平面连杆机构的工作原理是利用连杆的长度、角度和铰链的位置来实现特定的运动。
在平面连杆机构中,主要有以下几种常见的运动形式:1.顺序运动:当主动副驱动时,各个连杆按照一定的顺序依次运动。
这种运动形式常见于内燃机的活塞连杆机构。
2.并联运动:当多个连杆同时受到主动副驱动时,它们以同步的方式进行运动。
这种运动形式可以用来实现机械手臂等装置的运动。
3.逆运动:当主动副驱动时,连杆和铰链的位置发生变化,使机构实现逆向运动。
这种运动形式常见于一些特殊装置的设计。
平面连杆机构的工作原理和运动形式可以通过机械原理的分析和运动学的计算来实现。
其中,机械原理用来推导连杆运动的基本方程,而运动学则用来分析连杆机构的运动特性和运动关系。
三、平面连杆机构的设计要点在设计平面连杆机构时,需要考虑以下几个要点:1.运动要求:根据具体的工作要求,确定机构需要实现的运动形式和工作速度等指标。
2.运动范围:根据工作空间和杆件的长度等约束条件,确定连杆机构的运动范围。
3.结构强度:根据承载力和杆件的材料等因素,设计连杆机构的结构强度和刚度,以确保机构的正常工作。
4.运动平稳性:通过运动学计算和动力学分析,确定机构的运动是否平稳,以及如何减小振动和冲击力。