平面四杆机构的基本特性总结
- 格式:ppt
- 大小:1.66 MB
- 文档页数:26
平面四杆机构的类型特点及应用概念平行四杆机构的特点是固定杆和活动杆平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动,适用于汽车悬挂系统、工艺机械等领域。
正交四杆机构的特点是固定杆和活动杆相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于推动机械、绞车等领域。
菱形四杆机构的特点是固定杆和活动杆两两相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动和旋转运动,适用于啮合机构、制造机械等领域。
推动机构的特点是固定杆和活动杆两两平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于传动机构、物料输送机械等领域。
平面四杆机构的应用非常广泛。
它可以用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
在制造机械中,平面四杆机构常用于构建精密机床,如铣床、钻床等。
在工艺机械中,平面四杆机构常用于构建织机、纺机等。
在汽车悬挂系统中,平面四杆机构可以实现汽车悬挂系统的运动,提高汽车悬挂性能。
在绞车中,平面四杆机构可以用于提升和绞丝等工作。
在传动机构中,平面四杆机构可以用于实现直线传动和转动传动。
在物料输送机械中,平面四杆机构可以用于实现物料的输送和分拨。
总之,平面四杆机构具有多种类型和特点,适用于多个领域的应用。
它可以实现复杂的运动轨迹,广泛应用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
简述平面四杆机构的类型特点和应用一、平面四杆机构的类型:1. 平衡四杆机构:该机构有能力保持平衡,即使受到外部干扰也能够回到原来的位置。
这种机构被广泛用于稳定系统和开放环境。
2. 驱动四杆机构:该机构可以转化旋转运动为线性运动或反之。
这种机构广泛应用于机械工程、模具制造和自动化工程中。
3. 可逆四杆机构:该机构可以逆向工作,在不同的任务中灵活应用。
这种机构被广泛用于机器人工程和自动化工程中。
4. 变位四杆机构:该机构可以在不同位置自动调整,以适应不同的应用需求。
这种机构被广泛用于自动化机械和精密制造领域。
二、平面四杆机构的特点:1. 平面四杆机构可以转换不同类型的运动,包括旋转、线性、摆动等。
2. 平面四杆机构结构简单,易于制造和维护,具有良好的可靠性和稳定性。
3. 平面四杆机构可以通过组装多个单元来实现更高级别的机械结构,例如机器人、自动化系统等。
4. 平面四杆机构广泛应用于机械、汽车、制造、物流、自动化等领域,并逐渐成为机器人、智能装备的重要组成部分。
三、平面四杆机构的应用:1. 发动机连杆机构:由于发动机需要将旋转运动转化为线性运动来驱动汽车轮胎,平面四杆机构被广泛应用于汽车发动机的连杆机构中。
2. 物流设备:平面四杆机构可以逆向工作,可以将线性运动转化为旋转运动,这使得物流设备可以保持高速和精度,如自动包装线、调料机等。
3. 机械手:平面四杆机构的结构简单,稳定性好,这使得它成为机器人手臂的优选部件之一,广泛应用于各个制造领域。
4. 印刷机械:平衡四杆机构可以使印刷平台始终稳定,特别是在高速印刷时,它可以保持印刷品的精度和质量。
5. 飞控系统:平衡四杆机构被广泛应用于飞控系统的调节器中,以帮助控制飞行器的稳定性。
总的来说,平面四杆机构具有结构简单、稳定性好、运动特性多样等特点,可以在各个行业发挥重要的作用。

连杆机构的特点:优点:运动副单位面积所受的压力小且面接触受力小,便于润滑,磨损小;制造方便。
缺点:设计复杂误差大。
工作效率低。
平面四杆机构的基本类型——铰链四杆机构1、曲柄摇杆机构(1)曲柄:1作360°周转运动,(2)摇杆:3作往复摆动,主动件可以为曲柄,也可以为摇杆。
右面机构中摇杆的摆角为60°,作小于360的运动(3)连杆:连接曲柄与摇杆的杆件(4)连架杆:连接机架与连杆的杆件。
曲柄摇杆机构:两连架杆中一个为曲柄另一个为摇杆的铰链四杆机构双曲柄机构:两连架杆均为曲柄的铰链四杆机构双摇杆机构:两连架杆均为摇杆的铰链四杆机构平行四边形机构平行四边形机构是双曲柄机构的一个特例。
组成四边形对边的构件长度分别相等。
从动曲柄3和主动曲柄1的回转方向相同,角速度时时相等双摇杆机构:构件1和3都作往复摆动,一般主动摇杆作等速摆动,从动摇杆作变速摆动。
平面四杆机构的演化形式(Ⅰ)——含一个移动副的四杆机构曲柄滑块机构正置曲柄滑块机构滑块(slider)铰链点的运动方位线通过曲柄转动中心,滑块动程(pitch)等于两倍曲柄1的长度,无急回运动特性。
主动件可以为曲柄,也可以为滑块。
偏置曲柄滑块机构滑块铰链点的运动方位线不通过曲柄转动中心,偏距(offset)为e,滑块动程大于两倍曲柄长度,有急回运动特性导杆机构转动导杆机构曲柄1和导杆3都能作360°周转运动,主动曲柄作等速转动,从动导杆作变速转动,摆动导杆机构曲柄1作360°周转运动,摆动导杆3作往复摆动,且有较大的急回运动特性曲柄摇块机构移动导杆机构构件2作往复摆动,构件4在滑块中作往复移动。
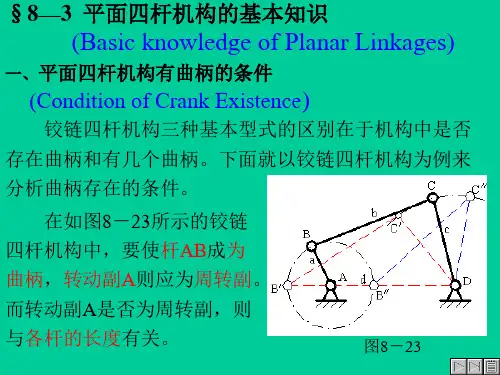
2 平面连杆机构的工作特性1、转动副为整转副的充分必要条件急回运动和行程速比系数原动曲柄转动一周过程中,有两次与连杆共线,即重叠共线和拉直共线,摇杆两个极限位置分别为C1D和C2D。
曲柄AB以等角速度ω顺时针转过α1角由位置AB1转到位置AB2,摇杆从C1D摆到C2D,摆角为φ,所需时间为t1,C点平均速度为V1。
平面四杆机构的类型,特点及应用概念平面四杆机构是一种重要的机械构件,具有固定点簇、连杆及活动点簇等关键组成部分。
根据不同的连接方式和功能需求,平面四杆机构可以分为平行四杆机构、菱形四杆机构、双曲线四杆机构、半圆四杆机构等多种类型。
下面本文将对这些机构类型的特点及应用进行相关介绍。
一、平行四杆机构平面四杆机构中的平行四杆机构,最为常见。
平行四杆机构由两对等长连杆组成,各自平行滑动,所以叫做平行四杆机构。
平行四杆机构的特点是连接点严格固定,适合转动相同方向的连续运动,如车床上的顶轴和平面磨床的进给机构就采用了平行四杆机构。
二、菱形四杆机构菱形四杆机构是由一对等长的对边固定的菱形和一对等长杆件组成的机构。
其中,两个杆件与菱形的对角线相连,另外两个杆件则与菱形两条平行线相连。
通过这样的联结方式,菱形四杆机构可以实现不同方向的运动,如旋钮开关,废乳机械的减速机构等都采用了菱形四杆机构。
三、双曲线四杆机构双曲线四杆机构是由双曲面、两个相交的固定点、两个关节和两个等长杆组成的平面四杆机构,主要是用来实现一定的负载传递和动力,例如工件阻力和重力等。
双曲线四杆机构的优点在于具有一定的自适应能力,可以自动调整杆长度,达到更稳定的运动效果。
应用领域包括夹持,钻床等。
四、半圆四杆机构半圆四杆机构是由两条半圆弧及两对连杆构成的平面四杆机构。
通过调整连接点的位置及杆长度,可以实现转轴轨迹的变化。
半圆四杆机构在工业生产中被广泛应用,如水平挖掘机,转子泵等。
在应用平面四杆机构的过程中,大多数机构的运动往往还需要与其它机构进行配合才能实现更复杂多变的功能。
此外在机器人领域中,四杆机构也得到了广泛应用,如各类机器人的手臂,就是利用四杆机构的特性来完成精细灵活的动作。
总的来说,平面四杆机构是机械领域中一类非常基础且重要的构件。
通过不同的连接方式和调整,可以实现多样化的运动功能,并被广泛应用在工业生产及机器人领域中。
《平面四杆机构的基本特性》教案教案:平面四杆机构的基本特性一、教学目标:通过本节课的学习,学生应能够:1.了解平面四杆机构的定义和基本特性;2.掌握平面四杆机构的运动特点和构造形式;3.能够运用所学知识解决平面四杆机构的相关问题。
二、教学内容:1.平面四杆机构的定义和基本特性:平面四杆机构是由四根连杆和若干铰链连接而成的机械系统,在平面内可以实现规定的运动。
平面四杆机构的基本特性包括:构成条件、运动链条件、运动副个数、自由度、杆件数量等。
2.平面四杆机构的运动特点:平面四杆机构的运动特点主要有:连杆运动、连杆约束、动平衡性和动稳定性等。
3.平面四杆机构的构造形式:平面四杆机构的构造形式包括:双曲杆机构、平行杆机构和菱形杆机构等。
每种构造形式都具有不同的特点和应用领域。
三、教学过程:1.导入:与学生互动讨论,引出平面四杆机构的概念,并了解其在日常生活中的应用。
2.知识讲解:(1)讲解平面四杆机构的定义和基本特性。
(2)介绍平面四杆机构的运动特点和构造形式,并通过实例分析加深学生的理解。
3.实例分析:(1)给出一个具体的平面四杆机构,并要求学生分析其构造形式和运动特点。
(2)将学生分成小组,自行选择一个平面四杆机构进行分析,并展示给全班。
4.练习与巩固:(1)在课堂上,教师设计一些与平面四杆机构相关的练习题,供学生巩固所学知识。
(2)布置作业:要求学生通过阅读相关文献或查阅互联网,找到一个实际应用了平面四杆机构的例子,并分析其构造形式和运动特点。
四、教学评价:1.通过课堂互动和小组展示,评价学生对平面四杆机构的理解程度。
2.批改学生完成的练习题,评价其对所学知识的掌握情况。
3.评价学生在作业中的查找和分析能力。
五、教学反思:通过本节课的教学,学生能够初步了解平面四杆机构的定义和基本特性,并掌握运动特点和构造形式。
但在实例分析环节,部分学生的理解还有待提高,今后可以通过更多的实例来加深学生对平面四杆机构的认识。