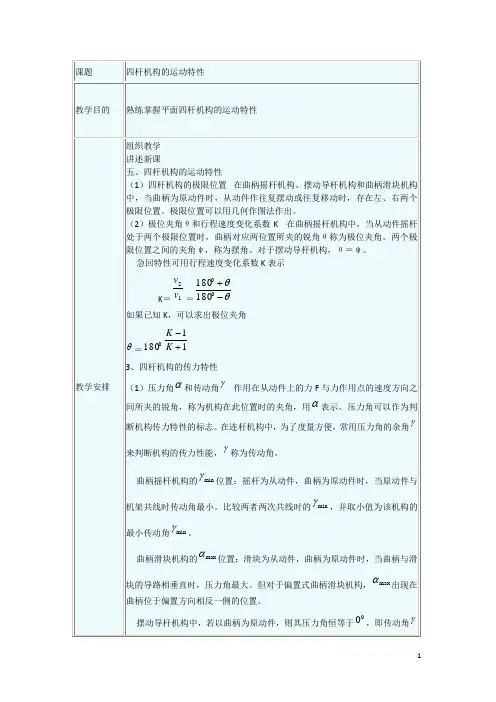
平面四杆机构的运动特性
- 格式:ppt
- 大小:1.15 MB
- 文档页数:21
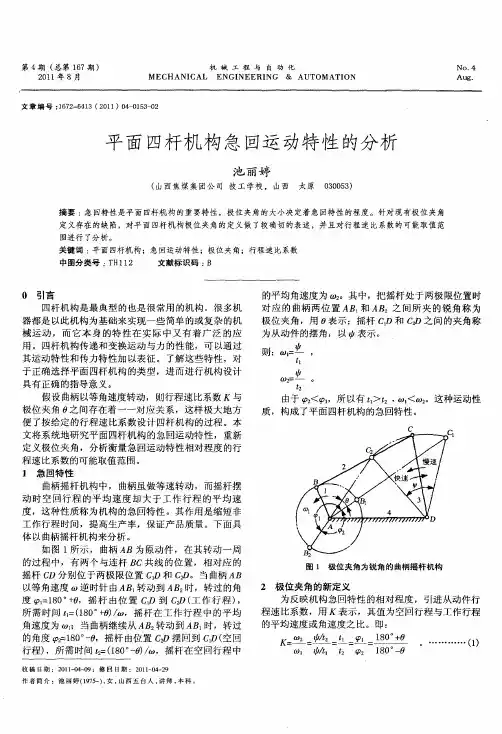
平面四杆机构动力学分析平面四杆机构是一种常用的机构形式,它由四个连杆构成,每个连杆的两个端点分别与两个固定点和两个动点连接。
平面四杆机构广泛应用于工程和机械领域,如发动机连杆机构、机床传动机构等。
在对平面四杆机构进行动力学分析时,需要考虑连杆的运动学特性以及受力情况,以求得机构的运动学和动力学性能参数。
本文将介绍平面四杆机构动力学分析的基本方法和步骤。
首先,对平面四杆机构进行运动学分析,即确定连杆的几何参数和运动特性。
通过连杆的长度、角度和位置关系,可以建立连杆运动学方程。
平面四杆机构一般有两个输入连杆和两个输出连杆,输入连杆一般由驱动源(如电机)控制,输出连杆用于传递或产生所需的运动。
其次,根据连杆的几何关系和运动学方程,可以推导得到平面四杆机构的速度和加速度方程。
速度方程描述了各连杆的速度与输入连杆的关系,加速度方程描述了各连杆的加速度与输入连杆的关系。
通过求解速度和加速度方程,可以得到每个连杆的线速度和角速度,以及各连杆的线加速度和角加速度。
接下来,进行平面四杆机构的力学分析。
根据连杆的几何关系和受力分析,可以推导得到每个连杆的力学方程。
力学方程描述了各连杆受到的力和力矩与其他连杆的关系。
通过求解力学方程,可以得到每个连杆的受力和力矩大小以及方向,以及各连杆之间的力传递关系。
最后,根据连杆的运动学和力学特性,可以得到平面四杆机构的动力学性能参数,如位置、速度和加速度的关系、力和力矩的大小和方向等。
这些参数可以用于分析机构的运动和受力情况,并进一步优化设计。
需要注意的是,平面四杆机构的动力学分析是一个复杂的过程,需要考虑各连杆之间的相互作用和约束条件。
同时,还需要考虑连杆的质量和惯量等因素,以求得更精确的分析结果。
因此,在实际应用中,常采用计算机辅助分析方法,如数值模拟和仿真技术,以提高分析的准确性和效率。
综上所述,平面四杆机构的动力学分析是一项重要的工作,对于优化设计和性能评估具有重要意义。

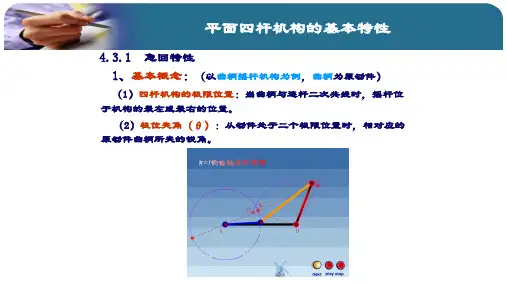
《平面四杆机构的基本特性》教案教案:平面四杆机构的基本特性一、教学目标:通过本节课的学习,学生应能够:1.了解平面四杆机构的定义和基本特性;2.掌握平面四杆机构的运动特点和构造形式;3.能够运用所学知识解决平面四杆机构的相关问题。
二、教学内容:1.平面四杆机构的定义和基本特性:平面四杆机构是由四根连杆和若干铰链连接而成的机械系统,在平面内可以实现规定的运动。
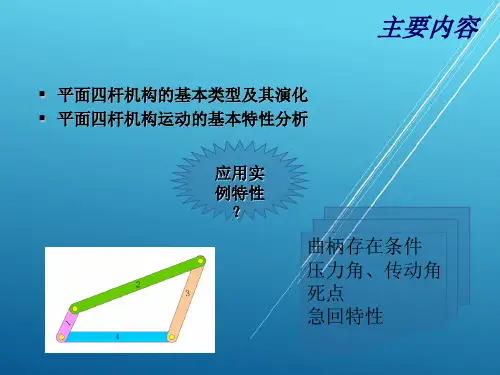
平面四杆机构的基本特性包括:构成条件、运动链条件、运动副个数、自由度、杆件数量等。
2.平面四杆机构的运动特点:平面四杆机构的运动特点主要有:连杆运动、连杆约束、动平衡性和动稳定性等。
3.平面四杆机构的构造形式:平面四杆机构的构造形式包括:双曲杆机构、平行杆机构和菱形杆机构等。
每种构造形式都具有不同的特点和应用领域。
三、教学过程:1.导入:与学生互动讨论,引出平面四杆机构的概念,并了解其在日常生活中的应用。
2.知识讲解:(1)讲解平面四杆机构的定义和基本特性。
(2)介绍平面四杆机构的运动特点和构造形式,并通过实例分析加深学生的理解。
3.实例分析:(1)给出一个具体的平面四杆机构,并要求学生分析其构造形式和运动特点。
(2)将学生分成小组,自行选择一个平面四杆机构进行分析,并展示给全班。
4.练习与巩固:(1)在课堂上,教师设计一些与平面四杆机构相关的练习题,供学生巩固所学知识。
(2)布置作业:要求学生通过阅读相关文献或查阅互联网,找到一个实际应用了平面四杆机构的例子,并分析其构造形式和运动特点。
四、教学评价:1.通过课堂互动和小组展示,评价学生对平面四杆机构的理解程度。
2.批改学生完成的练习题,评价其对所学知识的掌握情况。
3.评价学生在作业中的查找和分析能力。
五、教学反思:通过本节课的教学,学生能够初步了解平面四杆机构的定义和基本特性,并掌握运动特点和构造形式。
但在实例分析环节,部分学生的理解还有待提高,今后可以通过更多的实例来加深学生对平面四杆机构的认识。