第1讲 单自由度振动
- 格式:pdf
- 大小:889.52 KB
- 文档页数:9
第二章单自由度系统振动§1-1 概述单自由度系统的振动理论是振动理论的理论基础。
(1)尽管实际的机械都是弹性体或多自由度系统,然而要掌握多自由度振动的基本规律,就必须先掌握单自由度系统的振动理论。
此外,(2)许多工程技术上的具体振动系统在一定条件下,也可以简化为单自由度振动系统来研究。
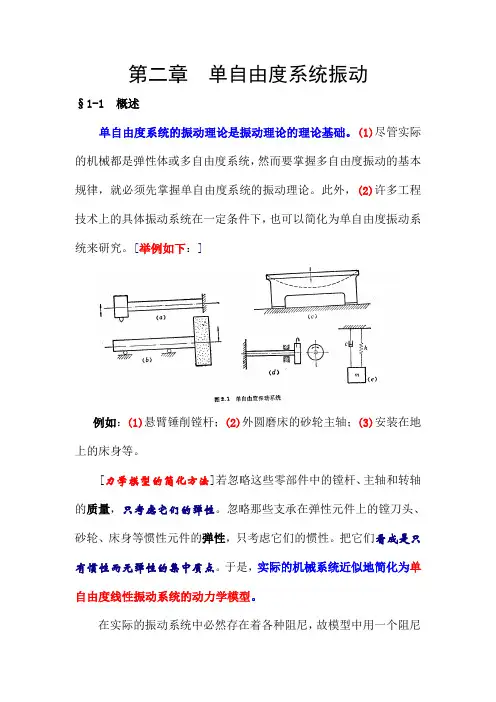
[举例如下:]例如:(1)悬臂锤削镗杆;(2)外圆磨床的砂轮主轴;(3)安装在地上的床身等。
[力学模型的简化方法]若忽略这些零部件中的镗杆、主轴和转轴的质量,只考虑它们的弹性。
忽略那些支承在弹性元件上的镗刀头、砂轮、床身等惯性元件的弹性,只考虑它们的惯性。
把它们看成是只有惯性而无弹性的集中质点。
于是,实际的机械系统近似地简化为单自由度线性振动系统的动力学模型。
在实际的振动系统中必然存在着各种阻尼,故模型中用一个阻尼器来表示。
阻尼器由一个油缸和活塞、油液组成。
汽车轮悬置系统等等。
[以上为工程实际中的振动系统]单自由度振动系统——指用一个独立参量便可确定系统位置的振动系统。
所有的单自由度振动系统经过简化,都可以抽象成单振子,即将系统中全部起作用的质量都认为集中到质点上,这个质点的质量m 称为当量质量,所有的弹性都集中到弹簧中,这个弹簧刚度k称为当量弹簧刚度。
以后讨论中,质量就是指当量质量,刚度就是指当量弹簧刚度。
在单自由度振动系统中,质量m、弹簧刚度k、阻尼系数C是振动系统的三个基本要素。
有时在振动系统中还作用有一个持续作用的激振力P。
应用牛顿运动定律,作用于一个质点上所有力的合力等于该质点的质量和该合力方向的加速度的乘积。
(牛顿运动定律) (达伦培尔原理)现取所有与坐标x 方向一致的力、速度和加速度为正,则:kx x C t P xm --= ωsin 0 (牛顿运动定律) (达伦培尔原理:在一个振动体上的所有各力的合力必等于零)(动静法分析:作用在振动体上的外力与设想加在此振动体上的惯性力组成平衡力系)上式经整理得,t P kx x C xm ωsin 0=++ (2.1) 该式就是单自由度线性振动系统的运动微分方程式的普遍式。

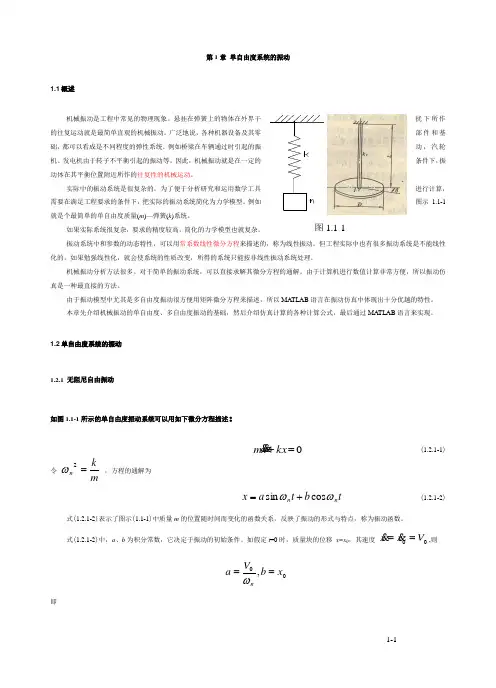
第1章 单自由度系统的振动1.1概述机械振动是工程中常见的物理现象。
悬挂在弹簧上的物体在外界干扰下所作的往复运动就是最简单直观的机械振动。
广泛地说,各种机器设备及其零部件和基础,都可以看成是不同程度的弹性系统。
例如桥梁在车辆通过时引起的振动,汽轮机、发电机由于转子不平衡引起的振动等。
因此,机械振动就是在一定的条件下,振动体在其平衡位置附近所作的往复性的机械运动。
实际中的振动系统是很复杂的。
为了便于分析研究和运用数学工具进行计算,需要在满足工程要求的条件下,把实际的振动系统简化为力学模型。
例如图示1.1-1就是个最简单的单自由度质量(m )—弹簧(k )系统。
如果实际系统很复杂,要求的精度较高,简化的力学模型也就复杂。
振动系统中和参数的动态特性,可以用常系数线性微分方程来描述的,称为线性振动。
但工程实际中也有很多振动系统是不能线性化的,如果勉强线性化,就会使系统的性质改变,所得的系统只能按非线性振动系统处理。
机械振动分析方法很多。
对于简单的振动系统,可以直接求解其微分方程的通解。
由于计算机进行数值计算非常方便,所以振动仿真是一种最直接的方法。
由于振动模型中尤其是多自由度振动很方便用矩阵微分方程来描述,所以MATLAB 语言在振动仿真中体现出十分优越的特性。
本章先介绍机械振动的单自由度、多自由度振动的基础,然后介绍仿真计算的各种计算公式,最后通过MATLAB 语言来实现。
1.2单自由度系统的振动1.2.1 无阻尼自由振动如图1.1-1所示的单自由度振动系统可以用如下微分方程描述:0=+kx xm (1.2.1-1) 令mkn =2ω ,方程的通解为t b t a x n n ωωcos sin += (1.2.1-2)式(1.2.1-2)表示了图示(1.1-1)中质量m 的位置随时间而变化的函数关系,反映了振动的形式与特点,称为振动函数。
式(1.2.1-2)中,a 、b 为积分常数,它决定于振动的初始条件。
第1章单自由度系统的振动分析在物理学中,振动是指物体沿着一些路径来回运动,且运动是有规律的。
振动在自然界中广泛存在,例如弹簧振子、摆锤等等。
而振动分析则是研究物体在振动过程中的运动规律,以及相关的物理量和性质。
单自由度系统是振动分析中最简单且常见的一种情况,它假设系统仅受到一个力的作用,且一个自由度足以描述系统的运动。
单自由度系统的振动分析可以通过牛顿第二定律和弹簧定律进行推导。
首先考虑一个弹簧振子,它由一个质点和一个弹性体构成。
当质点从平衡位置偏离时,弹性体产生弹力使质点受到一个恢复力。
根据胡克定律,弹力与偏离位移成正比,即F = -kx,其中F是恢复力,k是弹簧的劲度系数,x是质点与平衡位置的偏离量。
根据牛顿第二定律,F = ma,其中m是质点的质量,a是质点的加速度。
将恢复力代入上式,得到ma = -kx,即质点的加速度与它的位移成反比。
这是一个二阶线性常微分方程,即质点的位置随时间的变化满足x'' + (k/m)x = 0。
解这个方程得到的解为x = Asin(ωt +φ),其中A是振幅,ω是角速度,φ是初始相位。
这个解描述了质点随时间的振动。
振动的特性可以通过振动的频率和周期来描述。
频率表示单位时间内振动的次数,即1/ω,单位是赫兹(Hz);周期表示振动经过一个完整循环所需的时间,即2π/ω,单位是秒。
振动系统的能量可以分为动能和势能。
动能与质点的速度成正比,而势能与质点的位移成正比。
在振动过程中,动能和势能不断地相互转化,但系统的总能量保持不变。
为了进一步研究振动系统的性质,可以引入阻尼和激励。
阻尼是指振动系统受到的阻力,它会减弱振动系统的振幅。
激励是指外力对振动系统的施加,它可以改变系统的运动规律。
在振动分析中,还可以研究振动系统的共振现象。
共振是指当外力的频率接近振动系统的固有频率时,系统会出现明显的振幅增大现象。
共振会对系统产生不利的影响,因此在实际工程中需要避免共振的发生。
y sy(t)s=-k(y+y s )w=mg F(t)=-m y§1 单自由度体系的自由振动一、无阻尼的自由振动:如下图,以单自由度体系为例,设此梁上的集中质量为m ,其重量为W mg =,梁由于质量的重力引起的质量处的静力位移用s y 表示,与s y 相应的质量位置称为质量的静力平衡位置。
若此质量受到扰动离开了静力平衡位置,当扰动除去后,则体系将发生振动,这样的振动称为体系的自由振动。
由于振动的方向与梁轴垂直,故称为横向振动。
在此,只讨论微小振幅的振动,由振动引起的内力限于材料的弹性极限以内,用以表示质量运动的方程将为线性微分方程。
1、建立运动方程建立运动方程常用的基本原理是达朗伯原理(亦称惯性力法或动静法)。
今考虑在振动过程的某一瞬时t ,设质量在此瞬时离开其平衡位置的位移为y ,取质量为隔离体,则在质量上作用有三种力:质量的重量W ,杆件对质量的弹性恢复力S 和惯性力F(t)。
根据达朗伯原理,这三个力应成平衡,即 W+S+F(t)=0 (1) 在弹性体系中,弹性恢复力S 为 ()s k y y s =-+上式中的K 为一常数,称为刚度系数,代表简支梁上使质量在运动方向产生单位位移时需要加在质量上的沿质量运动方向的集中力的量值。
式中负号表示s 的指向和位移的方向相反。
而 1y s W k=⋅ 即 y s W k =⋅因此,将()s k y y s =-+和y s W k =⋅代入式(1)得()0F t ky =-+ (2)上式表明,如果以静力平衡位置作为计算位移的起点,则建立体系的运动方程时,可以不考虑重力W 的影响。
这对其他体系的振动(包括受迫振动)也同样适用。
将22()d yF t m dt =-代入式(2)得:22()0d ym ky t dt+= 令2k m ω= dyy dt= (速度) 22d y y dt =(加速度) 则 22()0d ym ky t dt+= 可变为 20y y ω+= (3)此为单自由度体系无阻尼自由振动的运动方程,它反映了这种振动的一般规律。