多机器人壁障
- 格式:pdf
- 大小:462.57 KB
- 文档页数:5

DOI: 10.11991/yykj.202010023网络出版地址:https:///kcms/detail/23.1191.U.20201202.1401.008.html可越障爬壁机器人研究与设计苏崇涛1,沙晗1,黄利春2,赵春霞11. 南京理工大学 计算机科学与工程学院,江苏 南京 2100942. 北方信息控制研究院集团有限公司,江苏 南京 211153摘 要:为了解决爬壁机器人越障性问题,本文根据爬壁机器人的吸附类型介绍了国内外足腿式、蠕动式以及飞吸式机器人越障能力的研究现状,以及本团队研制的3款越障式爬壁机器人的性能特点,对比了各类机器人越障性能的优劣性。
在此基础上探讨了爬壁机器人设计时的重点问题,对未来设计越障爬壁机器人起到了一定的引导作用。
关键词:爬壁机器人;越障;爬壁;吸附;负压吸附;足腿式;蠕动式;飞吸式;越障式机器人;越障式爬壁机器人中图分类号:TP242.6 文献标志码:A 文章编号:1009−671X(2021)02−0042−08The study and design of obstacle-surmounting wall climbing robotsSU Chongtao 1, SHA Han 1, HUANG Lichun 2, ZHAO Chunxia 11. School of Computer Science and Engineering, Nanjing University of Science and Technology, Nanjing 210094, China2. North Information Control Research Institute Group Co., Ltd., Nanjing 211153, ChiinaAbstract : In order to solve the obstacle-surmounting problems of climbing robots, this paper introduces the current research status of the obstacle-surmounting ability of legged, crawling and flying climbing robots, as well as the performances of three types of obstacle-surmounting wall-climbing robots created by our research group. The paper also compares the obstacle surmounting performances of aforesaid types of robots. On this basis, key points that should be considered in the design of wall-climbing robots are discussed, which is of great significance to guiding the design of obstacle-surmounting wall-climbing robots in the future.Keywords: wall-climbing robot; obstacle surmounting; wall-climbing; adhesion; negative pressure absorption; legged robot; crawling robot; flying robot; obstacle-surmounting robot; obstacle-surmounting wall-climbing robot爬壁机器人作为一种壁面移动机器人,结合了地面机器人的移动方式和壁面附着能力,将运动以及应用范围拓展至垂直立面空间。

三角履带爬壁机器人越障动力学建模与仿真王瑞;高荣慧;翟华【摘要】针对一些工作场合对爬壁机器人有较高的越障性能要求,设计了一种包含4个三角形履带轮组构成的磁吸附爬壁机器人.首先设计了三角履带爬壁机器人的整体结构,研究了越障过程中机器人结构变化,以及爬行越障和翻转越障通过原理.建立了翻转越障过程动力学模型,该模型体现了机器人机构尺寸等因素对电机输出力矩的影响.根据此模型,能确定机器人越障过程所需最小驱动力矩.利用ADAMS软件进行仿真验证,仿真结果证明了动力学模型的正确性,表明了机器人结构简单,具有较强的越障能力.%A new magnetic adsorption wall-climbing robot with 4 triangular tracks is designed to help the robot cross the obstacle for some work occasions. Firstly, the construction of the robot and the structural deformation of obstacle-climbing process are studied. Then the principle of the creeping-obstacle way and the turning-over obstacle way are expounded. The dynamic model for the turning-over obstacle process is built and the model describes the influence of structure size on motor' torque. Based on this model, the minimum driving torque for the turning-over obstacle process can be determined. A virtual model is simulated by ADAMS, which prove that the dynamic model for the turning-over obstacle process is correct,and the robot with triangular tracks can climb over higher obstacle.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)0z1【总页数】4页(P205-208)【关键词】三角形履带;磁吸附;爬壁机器人;越障;虚拟仿真【作者】王瑞;高荣慧;翟华【作者单位】合肥工业大学机械与汽车工程学院,安徽合肥 230009;合肥工业大学机械与汽车工程学院,安徽合肥 230009;合肥工业大学机械与汽车工程学院,安徽合肥 230009;合肥工业大学工业与装备技术研究院,安徽合肥 230009【正文语种】中文【中图分类】TH16;TP241 引言爬壁机器人是极限作业机器人的一个分支,其目的是代替人类,在核工业、石化企业、建筑行业、消防部门、造船等领域中的危险状态下作业,具有极其广泛的用途和很高的使用价值[1]。


爬壁机器人设计与操作方式标准建设出有随着科技的不断发展,机器人技术正越来越广泛地应用于各个领域,其中之一就是爬壁机器人。
爬壁机器人具备在垂直墙面上移动的能力,可以在高空、狭小空间等人类难以到达的环境中执行任务,为各行各业带来了巨大的便利和效益。
为了确保爬壁机器人的设计与操作方式达到一定的标准,本文将探讨爬壁机器人设计与操作方式的标准建设。
1. 爬壁机器人的设计要求1.1 适应多种环境爬壁机器人应设计成能够适应多种不同垂直墙面的表面材料和结构,例如水泥、玻璃、金属等。
在设计过程中,应考虑机器人的吸附力、稳定性和移动速度等因素,以确保其能够牢固地附着在墙面上并稳定地移动。
1.2 安全性在设计爬壁机器人时,安全性是一个至关重要的因素。
机器人应具备避免摔落的功能,例如采用传感器和算法识别墙面表面的凹凸,以避免机器人因表面不平而摔落。
此外,机器人的电源系统和机械结构也需要经过严格的测试和验证,确保其能够在任何工作环境下安全可靠地运行。
1.3 轻量化和紧凑化设计由于爬壁机器人常常需要在狭小的空间中进行工作,因此,设计时应尽量减小机器人的体积和重量,以提高其机动性和适应性。
同时,机器人的紧凑化设计也有利于减少与墙面的接触面积,从而降低机器人与墙面之间的摩擦力,提高其爬行效率。
2. 爬壁机器人的操作方式标准2.1 遥控操作爬壁机器人通常通过遥控操作来实现。
操作者可以通过遥控设备,如遥控器或手机APP,对机器人进行控制。
遥控操作方式的优点是简单易学,可以迅速掌握机器人的基本操作,缺点是需要操作者具备一定的操作技能和经验。
2.2 自动化操作随着人工智能技术的不断发展,爬壁机器人的自动化操作逐渐成为可能。
通过在机器人中引入各种传感器和算法,可以实现机器人的自主导航、避障和任务执行等功能。
自动化操作方式的优点是减轻操作者的负担,提高工作效率,缺点是需要额外的技术和设备支持。
2.3 远程监控与控制由于爬壁机器人常常工作在高空或狭小空间等人类难以到达的环境中,远程监控和控制是非常重要的。
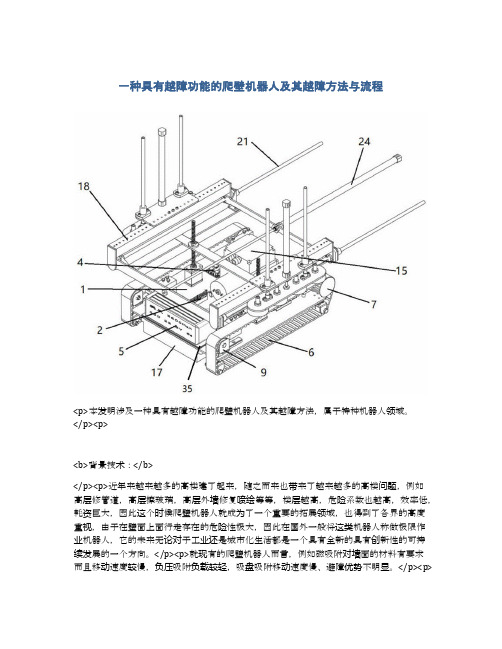
一种具有越障功能的爬壁机器人及其越障方法与流程
<p>本发明涉及一种具有越障功能的爬壁机器人及其越障方法,属于特种机器人领域。
</p><p>
<b>背景技术:</b>
</p><p>近年来越来越多的高楼建了起来,随之而来也带来了越来越多的高楼问题,例如
高层修管道,高层擦玻璃,高层外墙修复喷绘等等,楼层越高,危险系数也越高,效率低,耗资巨大,因此这个时候爬壁机器人就成为了一个重要的拓展领域,也得到了各界的高度
重视,由于在壁面上面行走存在的危险性极大,因此在国外一般将这类机器人称做极限作业机器人,它的未来无论对于工业还是城市化生活都是一个具有全新的具有创新性的可持续发展的一个方向。
</p><p>就现有的爬壁机器人而言,例如磁吸附对墙面的材料有要求
而且移动速度较慢,负压吸附负载较轻,吸盘吸附移动速度慢、避障优势不明显。
</p><p>
<b>技术实现要素:</b>。

机器人避障问题摘要:当今科学技术日益发达,高科技产品尤其是机器人在我们日常生活中运用的越来越广泛,它能够代替人类完成许许多多的工作,但如何能让机器人自动化的完成人类交给的任务成为设计机器人的关键。
我们做此题就是为了更好的利用机器人为我们提供方便,提高生活质量,若机器人程序设计不当不仅不会给人类带来方便,还很有可能给我们的生活带来更多的麻烦。
本题中提出了如何让机器人能够自动识别障碍物,保证机器人能够在合理区域行走,并设计出如何能让机器人自动判断最短路程于最短时间下行走路线的问题。
所以解决好本题可以为我们的生活提供帮助。
本文通过运用两点之间直线最短理论,优化问题,最短路问题,图论,以及运用matlab软件编程及作图的方法,阐述了机器人避障问题的相对优化方案的解决办法,即“两点之间直线最好,转弯半径最小”的理论,通过计算中的比较与选择把四条最短路径都求出了相对最优解,论证了转弯速度不会随着r的增加一直增大或减小,而是有一个最小极点的思想。
从而求出了r,以及最短的时间。
问题一,通过对最短路问题的分析,我们很容易分解成线圆结构来求解,然后把可能路径的最短路径采用穷举法列举出来,最终得出最短路径:O →A 最短路径为:471.0372O →B 最短路径为:838.0466O →C 最短路径为:1085.7531O→A→B→C→O最短路径为:2834.6591问题二,通过建立时间t与r的关系式,得出r在11.504时,从O到A的时间相对最短,最短时间为98.606004。
我们可以利用此篇论文解决生活中实际的问题,在计算时可以节省大量的时间,使机器人又准确又完善的完成我们给定的任务,从而进行拓展,给定区域内任何两个点,我们都可求出其最短路径和走完全程的最快时间。
从而可以让机器人帮助我们给家里打扫卫生或设计自动吸尘器等,也可使机器人在最短的时间完成工作,提高效率,延长机器人的使用寿命。
关键字:最短路问题优化问题 matlab一 问题重述 随着现代科学技术日新月异的发展,机器人越来越多的出现在日常生活中,它既可以通过运行预先编排的程序为人类服务,根据人工智能程序自动处理一些生活中问题,进而协助或者相应地取代人类的工作,可以说机器人的创新与改进正一步步影响着人类的发展。
机器人避障原理
机器人避障原理基于感知和决策两个关键步骤。
感知阶段使用多种传感器(如红外线传感器、超声波传感器、摄像头等)来感知周围环境,获取前方或周围障碍物的位置、距离和形状等信息。
通过数据处理和分析,机器人能够建立起周围环境的模型。
在决策阶段,机器人根据感知到的环境信息来制定避障策略。
常见的策略包括绕过障碍物、避开障碍物或停下等。
这些策略可能需要考虑到障碍物的距离、速度、大小等因素。
机器人会根据预设的优先级或利益最大化准则,选择合适的策略来避免碰撞或危险。
在实现避障行为时,机器人会使用自身的动作控制系统来执行策略。
这包括控制机器人的移动、速度和方向。
机器人根据感知数据和决策策略来调整自身的运动轨迹,以避开障碍物并保持安全。
总体而言,机器人避障原理是通过感知周围环境,分析障碍物信息,并根据预设策略选择合适的动作控制来实现避免碰撞的目标。
这一原理的实现离不开传感器技术、数据处理算法和动作控制系统的协同作用。
一种具备爬壁越障功能的机器人的制作方法1.本发明涉及爬壁越障功能的机器人技术领域,更具体地说,涉及一种具备爬壁越障功能的机器人。
<b>背景技术:</b>2.爬壁机器人把地面移动技术和吸附技术有机结合起来,可以携带专门的工具,代替人类在距地面有一定高度的建筑、工业设施等竖直壁面上工作,可广泛应用于工业、救援、侦查、壁面清洁等领域。
目前爬壁机器人主要采用磁吸附、仿生吸附和负压吸附等壁面吸附技术。
磁吸附能够产生很大的吸附力,但是在非磁性的材质壁面将形成不了吸附力,适用范围受到很大的局限性;仿生吸附材对灰尘等污染物较敏感,实用性较差;负压吸附方式适用于各种不同材质的壁面,使用和维护较方便,因此得到了较广泛的应用。
爬壁机器人的出现可以使人类避免从事危险的高空陡壁作业,不仅提高了工作效率,节约了成本,而且可以改善了操作人员的工作环境。
3.公开号为cn201922170894.x的使用新型公开了一种自爬壁机器人自主爬行和越障机构,包括底盘,所述底盘的外侧多组腿部,所述腿部包括足式电磁铁吸盘、压力传感器、万向节联轴器、膝关节缓冲弯曲、电磁铁吸盘控制器、膝关节、髋关节、髋关节电机、横移电机、膝关节电机,所述横移电机设置在底盘的外侧,所述横移电机的输出端连接髋关节,所述髋关节电机设置在横移电机的输出端,所述髋关节和髋关节电机连接,所述膝关节设置在髋关节远离横移电机的一端,所述膝关节电机设置在髋关节的外侧,所述膝关节和膝关节电机连接,所述电磁铁吸盘控制器设置在膝关节的外侧,所述膝关节缓冲弯曲设置在电磁铁吸盘控制器的下方位置,所述足式电磁铁吸盘通过万向节联轴器与膝关节缓冲弯曲之间连接,所述压力传感器设置在足式电磁铁吸盘的外侧。
4.但是上述机器人采用仿生技术,多组关节和关节电机导致造价成本高,且爬壁的行进速度有待考证,并且在大范围内该机器人的工作效率较低。
<b>技术实现要素:</b>5.本发明提供了一种具备爬壁越障功能的机器人,旨在解决上述现有技术中的问题。