风力发电机组偏航变桨齿轮传动中心距与偏心量的计算
- 格式:pdf
- 大小:399.99 KB
- 文档页数:2
摘要风能是一种清洁的永续能源,风力发电逐渐成为许多国家可持续发展战略的重要组成部分"随着风力发电应用的日益广泛,风力机组技术也进行大量革新,从失速控制发展到变桨距控制,从定速运行发展到变速恒频,从齿轮箱传动发展到无齿直驱和混合驱动技术"变桨距控制作为大型风力机组的关键技术之一,本文对电液比例液压变桨距控制系统进行了理论推导!仿真分析和实验验证"本文在风力机空气动力学分析的基础上,提出风力机变桨距控制策略;改变传统的曲柄机构驱动桨叶旋转的统一变桨距方式,设计了摇块机构驱动叶片旋转的独立液压变桨距机构,通过理论分析计算得出风力机在极端运行条件下变桨距所需推力,设计了变桨距液压系统。
关键字:风力发电;变桨距;电液比例控制 ,系统建模ABSTRACTWind energy is a clean and sustainable energy and has became an important part of the strategy of sustainable development in many countries. With the wide using of wind power, wind turbine technology updates a lot, such as from stall control to variable pitch control, from fixed speed to variable speed and constant frequency, from transmission technology of the gear box to gearless driving and hybrid driving technology. Since the variable^-pitch control was one of the key techniques in big-size wind turbine, this thesis applies theoretical analysis, simulation analysis and experimental validation to the study of the electro-hydraulic proportional hydraulic variable-pitch control system.Based on the aerodynamic analysis of wind turbine, the variable-pitch control strategy of the wind turbine was derived. It also changes the traditional variable-pitch approach driven by the crankshaft swinging bar mechanism, and designs the live hydraulic variable-pitch mechanism driven by the swing block mechanism. The thesis figures out the needed thrust pitch of the wind turbine under extreme operational conditions through the theoretical analysis, and designs variable-pitch hydraulic system.KEY WORDS: wind power, pitch- regulated, electro-hydraulic proportional, system modeling目录1绪论 (1)1.1 风力发电变桨控制系统国内外的研究现状 (1)1.2风力发电变桨控制系统的研究背景和意义 (2)1.2.1风力发电变桨控制系统的研究背景 (2)1.2.2 风力发电变桨控制系统选题的意义 (3)1.3 本课题的主要研究工作 (3)2 风力发电机组的电液变桨距系统控制原理 (4)2.1风力发电机组的组成 (4)2.2风力发电机组的变桨距控制原理 (4)3 风力发电机组变桨距的研究 (7)3.1风力发电机组的控制技术 (7)3.1.1 风力机定桨距控制技术 (7)3.1.2 风力机变桨距控制技术 (7)3.2变桨矩风力机组的运行状态 (8)3.2.1启动状态 (9)3.2.2欠功率状态 (9)3.2.3额定功率状态 (9)3.3变桨矩控制系统 (10)3.3.1变桨距控制 (10)3.3.2 速度控制 A (11)3.3.3速度控制 B (12)3.4变桨矩系统分类 (12)4 风力发电机组变桨距电液比例控制系统设计 (16)4.1风力发电机组变桨距的电液比例控制技术 (16)4.2变桨距电液比例控制系统的设计 (17)4.3 变桨距液压系统设计 (18)4.4 变桨距机械单元的设计方案 (19)4.5变桨距液控单元的设计方案 (21)4.5.1变桨距控制 (23)5 风力发电机组变桨距系统建模 (28)5.1 变桨距电液比例控制系统的数学模型 (28)5.1.1比例控制放大器的数学模型 (28)5.1.2 电液比例方向阀阀芯运动的数学模型 (28)5.1.3对称阀控非对称液压缸环节的数学模型 (29)5.2位移传感器的传递函数 (33)5.3 系统稳定性分析 (35)总结 (36)参考文献 (37)致谢........................................................ 错误!未定义书签。
毕业设计(2010届)题目:风力发电中偏航变距校正设计学院:物理电气信息学院专业:电子信息工程年级:06级电子(1)班学生学号:12006243776学生姓名:邢伟指导教师:蔡圣清时间: 2009年11月01日摘要能源、环境是当今人类生存和发展所要解决的紧迫问题。
风力发电作为一种可持续发展的新能源,不仅可以节约常规能源,而且减少环境污染,具有较好的经济效益和社会效益,越来越受到各国的重视。
由于风能具有能量密度低、随机性和不稳定性等特点,风力发电机组是复杂多变量非线性不确定系统。
风力发电的原理是利用风轮将风能转化为机械能,再通过传动系统带动发电机将机械能转化为电能。
就其组成来看,风力发电机组一般由风轮、传动系统、发电机、偏航装置、控制系统、塔架等主要部分组成。
从能量转换的角度看,风力发电机组由两大部分组成:其一是风力机,它的功能是将风能转换为机械能;其二是发电机,它的功能是将机械能转换为电能。
风力发电技术是涉及空气动力学、自动控制、机械工程、电机学、计算机技术、材料学等多学科的综合性高技术系统工程。
目前在风力发电领域,研究难点和热点集中在大型风力发电机组的设计、风力发电机组的先进控制策略和优化技术等方面。
其中,控制技术是风力发电机组安全高效运行的关键技术。
从风力机功率控制方式上看,目前对风力机的控制主要采取两种方式:一种是定桨距失速控制,另一种是变桨距控制。
随着风力发电机组单机容量的大型化,变桨距控制方式取代定桨距控制方式是必然的趋势[51。
所谓变桨距控制是根据风速的变化来调整叶片的桨距角,从而控制风力发电机组的输出功率,以达到风力机在低风速阶段尽可能多的吸收风能,以及风力发电机在高风速阶段保持功率平稳输出的目的。
因此,开展对风力机变桨距控制系统及其执行机构的研究具有重要的意义。
随着先进设计方法及现代控制技术的发展与广泛应用,为变桨距控制系统及其执行机构的研究提供了更多的方法和手段。
因此,本文以变桨距控制系统及其执行机构的研究为切入点,结合现代控制技术,运用现代设计方法,开展对风力发电技术的研究。
BJJSQ1500A风力发电机变桨减速器设计说明书德阳东汽电站机械制造有限公司2006-04-24目录一、应用4二、技术参数52.1齿轮箱52.2材料52.3大齿环和小齿轮52.3.1大齿环齿轮52.3.2小齿轮52.4小齿轮轴承52.5载荷62.5.1小齿轮力矩62.5.2轴承设计的载荷62.5.3电动机总量载荷6三、传动系设计及校核63.1已知条件63.2方案设计63.2.1结构设计63.2.2齿形及精度73.2.3齿轮材料及其性能[1]73.2.4配齿及传动比计算73.3齿轮参数初步确定73.3.1按弯曲强度估算各级齿轮法向模数73.3.1.1 估算第一级法向模数73.3.1.2 估算第二级法向模数83.3.1.3 估算第三级法向模数83.3.2各级主要几何尺寸93.3.2.1 第一级主要几何尺寸93.3.2.2 第二级主要几何尺寸93.3.2.3 第三级主要几何尺寸93.4各级齿轮疲劳强度校核93.4.1第一级疲劳强度校核93.4.1.1 第一级外啮合齿面接触疲劳强度93.4.1.2 第一级外啮合齿根弯曲疲劳强度103.4.1.3 第一级内啮合齿面接触疲劳强度113.4.1.4 第一级内啮合齿根弯曲疲劳强度123.4.2第二级疲劳强度校核133.4.2.1 第二级外啮合齿面接触疲劳强度133.4.2.2 第二级外啮合齿根弯曲疲劳强度143.4.2.3 第二级内啮合齿面接触疲劳强度153.4.2.4 第二级内啮合齿根弯曲疲劳强度163.4.3第三级疲劳强度校核163.4.3.1 第三级外啮合齿面接触疲劳强度163.4.3.2 第三级外啮合齿根弯曲疲劳强度173.4.3.3 第三级内啮合齿面接触疲劳强度183.4.3.4 第三级内啮合齿根弯曲疲劳强度193.5齿轮静强度校核203.6传动装配条件验算213.6.1传动比条件213.6.2邻接条件213.6.3同心条件213.6.4装配条件213.7啮合参数213.8齿轮几何尺寸计算213.9传动效率计算223.10结构设计233.11轴承设计及校核233.11.1第一级行星轮轴承校核233.11.2第二级行星轮轴承校核243.11.3第三级行星轮轴承校核243.11.4输出轴轴承载荷校核253.12轴的强度校核263.12.1太阳轮轴强度计算263.12.2行星轮轴强度计算263.13鼓形齿联轴器接触强度计算263.13.1第二级鼓形齿联轴器263.13.2第三级鼓形齿联轴器273.14花键轴挤压强度校核28四、润滑和密封28五、运行和质量认可测试295.1空载实验295.2极端过载实验295.3疲劳测试295.4低温冲击实验29六、环境条件29七、防腐29参考文献:29一、应用本手册是FD70A/FD77A风力发电机偏航减速器的结构说明和生产规范。
风电机组桨距角计算公式全文共四篇示例,供读者参考第一篇示例:风电机组是一种利用风能产生电力的设备,其中的风电机组桨叶起着至关重要的作用。
桨叶的设计不仅决定了风电机组的性能和效率,还直接影响到电力的产生。
而桨叶的角度——也就是桨距角,是风电机组设计中需要重点考虑的参数之一。
桨距角是指桨叶与风向的夹角,也就是桨叶相对于前进方向的偏离角度。
它的大小直接决定了桨叶对风的利用效率。
通常情况下,桨叶的桨距角是可以调节的,通过改变桨距角可以实现对风电机组的风能利用效率进行调整,从而提高电力的产生效率。
那么如何计算风电机组桨叶的桨距角呢?其实,桨距角的计算并不复杂,但是需要考虑一些重要的因素。
在风电机组设计中,一般采用以下的计算公式来计算桨距角:桨距角=arctan (v/(ωr))桨距角表示桨叶与风向的实际夹角,单位为度;v表示风速,单位为m/s;ω表示桨叶的旋转速度,单位为rad/s;r表示桨叶的半径,单位为m。
在实际计算中,需要注意以下几点:1. 风速的测量准确性是计算桨距角的前提。
只有准确测量到了风速才能保证计算出来的桨距角是准确的。
2. 桨叶的旋转速度也需要进行准确的测量。
桨叶的旋转速度直接决定了风能的转化效率,因此在计算桨距角时一定要确保旋转速度的准确性。
3. 桨叶的半径也是一个需要准确测量的参数。
桨叶的半径决定了风电机组的叶片面积,进而影响到风电机组的发电性能。
通过以上的计算公式和注意事项,我们可以比较准确地计算出风电机组桨叶的桨距角,从而指导风电机组的设计和运行。
调整桨距角可以实现对风电机组性能的优化,提高风电机组的电力产生效率,为清洁能源的发展做出贡献。
【本文总字数:416字】第二篇示例:而风机叶片的角度又叫做“桨距角”,是指叶片相对于旋转轴线所成的角度。
桨距角的大小直接影响风叶对风的截取面积,以及能量的转化效率。
正确计算和调整风机叶片的桨距角对于提高风机的发电效率至关重要。
我们来看一下关于风机叶片桨距角的计算公式。

风力发电机组偏航系统详细介绍资讯频道 2012-12-15偏航系统是水平轴式风力发电机组必不可少的组成系统之一。
偏航系统的主要作用有两个。
其一是与风力发电机组的控制系统相互配合,使风力发电机组的风轮始终处于迎风状态,充分利用风能,提高风力发电机组的发电效率;其二是提供必要的锁紧力矩,以保障风力发电机组的安全运行。
风力发电机组的偏航系统一般分为主动偏航系统和被动偏航系统。
被动偏航指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有尾舵、舵轮和下风向三种;主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,常见的有齿轮驱动和滑动两种形式。
对于并网型风力发电机组来说,通常都采用主动偏航的齿轮驱动形式。
1.偏航系统的技术要求1.1. 环境条件在进行偏航系统的设计时,必须考虑的环境条件如下:1). 温度;2). 湿度;3). 阳光辐射;4). 雨、冰雹、雪和冰;5). 化学活性物质;6). 机械活动微粒;7). 盐雾。
风电材料设备8). 近海环境需要考虑附加特殊条件。
应根据典型值或可变条件的限制,确定设计用的气候条件。
选择设计值时,应考虑几种气候条件同时出现的可能性。
在与年轮周期相对应的正常限制范围内,气候条件的变化应不影响所设计的风力发电机组偏航系统的正常运行。
1.2. 电缆为保证机组悬垂部分电缆不至于产生过度的纽绞而使电缆断裂失效,必须使电缆有足够的悬垂量,在设计上要采用冗余设计。
电缆悬垂量的多少是根据电缆所允许的扭转角度确定的。
1.3. 阻尼为避免风力发电机组在偏航过程中产生过大的振动而造成整机的共振,偏航系统在机组偏航时必须具有合适的阻尼力矩。
阻尼力矩的大小要根据机舱和风轮质量总和的惯性力矩来确定。
其基本的确定原则为确保风力发电机组在偏航时应动作平稳顺畅不产生振动。
只有在阻尼力矩的作用下,机组的风轮才能够定位准确,充分利用风能进行发电。
1.4. 解缆和纽缆保护解缆和纽缆保护是风力发电机组的偏航系统所必须具有的主要功能。
BJJSQ1500A风力发电机变桨减速器设计说明书德阳东汽电站机械制造有限公司2006-04-24目录一、应用 (5)二、技术参数 (5)2.1齿轮箱 (5)2.2材料 (5)2.3大齿环和小齿轮 (6)2.3.1大齿环齿轮 (6)2.3.2小齿轮 (6)2.4小齿轮轴承 (6)2.5载荷 (6)2.5.1小齿轮力矩 (6)2.5.2轴承设计的载荷 (6)2.5.3电动机总量载荷 (6)三、传动系设计及校核 (7)3.1已知条件 (7)3.2方案设计 (7)3.2.1结构设计 (7)3.2.2齿形及精度 (7)3.2.3齿轮材料及其性能[1] (7)3.2.4配齿及传动比计算 (7)3.3齿轮参数初步确定 (8)3.3.1按弯曲强度估算各级齿轮法向模数 (8)3.3.1.1 估算第一级法向模数 (8)3.3.1.2 估算第二级法向模数 (8)3.3.1.3 估算第三级法向模数 (9)3.3.2各级主要几何尺寸 (9)3.3.2.1 第一级主要几何尺寸 (9)3.3.2.2 第二级主要几何尺寸 (9)3.3.2.3 第三级主要几何尺寸 (10)3.4各级齿轮疲劳强度校核 (10)3.4.1第一级疲劳强度校核 (10)3.4.1.1 第一级外啮合齿面接触疲劳强度 (10)3.4.1.2 第一级外啮合齿根弯曲疲劳强度 (11)3.4.1.3 第一级内啮合齿面接触疲劳强度 (12)3.4.1.4 第一级内啮合齿根弯曲疲劳强度 (13)3.4.2第二级疲劳强度校核 (14)3.4.2.1 第二级外啮合齿面接触疲劳强度 (14)3.4.2.2 第二级外啮合齿根弯曲疲劳强度 (15)3.4.2.3 第二级内啮合齿面接触疲劳强度 (16)3.4.2.4 第二级内啮合齿根弯曲疲劳强度 (16)3.4.3第三级疲劳强度校核 (17)3.4.3.1 第三级外啮合齿面接触疲劳强度 (17)3.4.3.2 第三级外啮合齿根弯曲疲劳强度 (18)3.4.3.3 第三级内啮合齿面接触疲劳强度 (19)3.4.3.4 第三级内啮合齿根弯曲疲劳强度 (20)3.5齿轮静强度校核 (21)3.6传动装配条件验算 (22)3.6.1传动比条件 (22)3.6.2邻接条件 (22)3.6.3同心条件 (22)3.6.4装配条件 (22)3.7啮合参数 (22)3.8齿轮几何尺寸计算 (22)3.9传动效率计算 (23)3.10结构设计 (24)3.11轴承设计及校核 (24)3.11.1第一级行星轮轴承校核 (24)3.11.2第二级行星轮轴承校核 (25)3.11.3第三级行星轮轴承校核 (25)3.11.4输出轴轴承载荷校核 (26)3.12轴的强度校核 (27)3.12.1太阳轮轴强度计算 (27)3.12.2行星轮轴强度计算 (27)3.13鼓形齿联轴器接触强度计算 (28)3.13.1第二级鼓形齿联轴器 (28)3.13.2第三级鼓形齿联轴器 (28)3.14花键轴挤压强度校核 (29)四、润滑和密封 (30)五、运行和质量认可测试 (30)5.1空载试验 (30)5.2极端过载试验 (30)5.3疲劳测试 (30)5.4低温冲击试验 (30)六、环境条件 (30)七、防腐 (30)参考文献: (31)一、应用本手册是FD70A/FD77A风力发电机偏航减速器的结构说明和生产规范。
《风力发电变桨距自抗扰控制技术研究及其参数整定》篇一一、引言随着全球能源结构的转型,风力发电作为清洁、可再生的能源形式,正受到越来越多的关注和重视。
其中,变桨距技术是实现风力发电机组稳定、高效运行的关键技术之一。
本文将针对风力发电变桨距自抗扰控制技术进行研究,并探讨其参数整定方法,为风力发电技术的进一步发展提供理论支持。
二、风力发电变桨距技术概述风力发电变桨距技术是通过调整风力发电机组桨叶的安装角度,改变风能转化为机械能的比例,从而实现机组输出功率的稳定和高效运行。
自抗扰控制技术则是一种能够抵抗外界干扰,提高系统稳定性的控制策略。
因此,将自抗扰控制技术应用于风力发电变桨距系统中,对于提高机组的运行性能和可靠性具有重要意义。
三、自抗扰控制技术研究自抗扰控制技术是一种基于非线性控制理论的控制策略,其核心思想是通过引入扩张状态观测器(ESO)和状态误差反馈(SEF)等方法,对系统中的扰动进行实时观测和补偿,从而实现对系统的精确控制。
在风力发电变桨距系统中,自抗扰控制技术可以通过实时观测风速、风向等外界因素对机组的影响,调整桨叶的安装角度,使机组输出功率稳定在设定值附近。
四、参数整定方法研究参数整定是自抗扰控制技术中的重要环节,它决定了系统控制器的性能和稳定性。
针对风力发电变桨距自抗扰控制系统,本文提出了一种基于遗传算法的参数整定方法。
该方法通过遗传算法的优化过程,对自抗扰控制器的参数进行寻优,从而得到最优的控制器参数组合。
这种方法可以有效地提高系统的稳定性和响应速度,同时降低系统的超调量。
五、实验验证与分析为了验证本文提出的自抗扰控制技术及其参数整定方法的可行性和有效性,我们进行了大量的实验验证和分析。
实验结果表明,采用自抗扰控制技术的风力发电机组在变桨距系统中表现出良好的稳定性和响应速度。
同时,采用基于遗传算法的参数整定方法能够有效地优化控制器的参数组合,进一步提高系统的性能。
与传统的PID控制方法相比,自抗扰控制技术及其参数整定方法在风力发电变桨距系统中具有明显的优势。
0 引言风能因蕴含了巨大的能量而被广泛关注,风能的高效利用主要依赖于风电机组对风向的追踪及对风能利用率的控制,而偏航系统和变桨系统便是实现该功能的重要部件,其性能直接决定着风电机组的经济性和安全性。
长期运行的风电机组的偏航和变桨减速器齿轮箱由于长期啮合运转,频繁启停,且减速器齿轮箱内没有润滑油过滤装置,导致润滑油常出现发黑发臭的现象,严重时不能保证齿轮箱内齿轮正常的润滑特性,从而影响偏航系统和变桨系统的正常运行。
所以,需要对各风电机组偏航和变桨减速器在用齿轮油定期取样检测[1-3],实现对设备的主动维护[4]。
本文通过对200台机组的偏航变桨减速器齿轮油样品进行检测及分析,推测油品劣化变质是由齿轮、轴承在运行中产生的微小金属磨粒或者齿轮箱由于密封问题由外部进入的微小杂质导致的。
在用齿轮油变质后,其润滑性能是否能继续满足设备的润滑需求是首先要解决的问题。
因此,本文通过对200台风电机组定期取样,详细研究了在用齿轮油各参数的变化,评价其在用油的更换周期。
1 偏航及变桨减速器特点偏航系统是风电机组的伺服系统,主要有两个作用:一是风电机组叶轮跟踪变化的风向;二是当风电机组由于偏航作用机舱内引出的电缆发生缠绕时,自动解除缠绕。
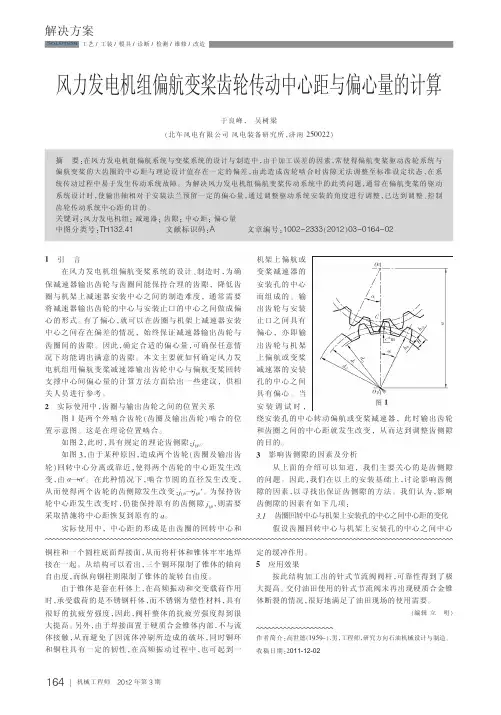
大型风电机组的偏航减速器一般采用如图1所风力发电机组偏航和变桨减速器 在用齿轮油更换周期的研究杨 策1,梁培沛1,孙玉彬1,胡 鹏1[龙源(北京)风电工程技术有限公司,北京 100034]摘 要:风电机组偏航和变桨减速器的润滑是保障风电机组安全高效运行的关键性因素之一。
为了研究风电机组偏航和变桨减速器在用齿轮油的衰变特性,指导现场按质换油,本文提出了风电机组偏航和变桨减速器在用齿轮油换油周期的优化方法。
通过对200台风电机组在用偏航和变桨齿轮油的劣化情况进行跟踪与评估,结果表明,偏航和变桨减速器在用齿轮油在机组运行了8000-10000小时后应予以更换。
该研究结果可以为我国现有风电机组偏航和变桨减速器齿轮箱在用齿轮油的更换提供参考。
风力发电机组的变桨/偏航轴承润滑
周迎辉
【期刊名称】《现代制造》
【年(卷),期】2012(000)038
【摘要】从2005年年到2010年,中国的风电市场呈现高速增长,每年装机量几近翻番。
截止到2011年底,中国的风电总装机量已经在全球排名第一。
【总页数】2页(P52-53)
【作者】周迎辉
【作者单位】福斯润滑油(中国)有限公司
【正文语种】中文
【中图分类】TM315
【相关文献】
1.风力发电机组偏航变桨齿轮传动中心距与偏心量的计算 [J], 于良峰;吴树梁
2.变速变桨风力发电机组的桨距控制及载荷优化 [J], 何玉林;苏东旭;黄帅;任海军;陈真
3.风力发电机组偏航和变桨减速器在用齿轮油更换周期的研究 [J], 杨策; 梁培沛; 孙玉彬; 胡鹏
4.风力发电机组偏航和变桨减速器在用齿轮油更换周期的研究 [J], 杨策;梁培沛;孙玉彬;胡鹏
5.偏航变桨减速器轻量化设计思路 [J], 王林焱;马文广;马海波;李忠强;张聪;任世文因版权原因,仅展示原文概要,查看原文内容请购买。
5-第5章-《风力发电机组机械传动系统》风力发电机组机械传动系统1、主轴是风轮的转轴,支撑风轮并将风轮的【扭矩】传递给齿轮箱,将【轴向推力】和【气动弯矩】传递给底座。
2、计算主轴直径常用【3np d A 】,其中P 指的是【主轴传递的功率】,n 为【主轴的转速】,A 指的是与材料有关的系数,常取105-115。
3、常用的主轴材料有【42CrMoA 】和【34CrNiMo6】。
4、主轴的毛坯是【锻件】,经过反复锻打改善金属的【纤维组织】以提高承载能力。
5、主轴精加工后各台阶过渡段均为光亮【无刀痕】的圆角,以防止【应力集中】发生。
6、联轴器用于连接两传动轴,一般由两个【半联轴节】及【连接件】组成。
7、传统的采用齿轮箱增速的风力发电机组传动形式按【主轴轴承的支撑】方式,分为【一点式】、【两点式】、【三点式】和【内置式】。
8、三点式布置的机组,齿轮箱除了主轴传递的扭矩外,还要承受平衡风轮重力等形成的【支反力】。
9、膜片式联轴器的补偿范围为轴向小于【4mm 】,角向小于【1°】,径向小于【6mm 】.10、对于标准联轴器而言,选用时主要确定联轴器【类型】和【型号】。
11、高弹性联轴器性能要求中,最大许用转矩为额定转矩的【3】倍以上,必须具有【100Ω】以上的绝缘电阻,并能承受【2】kV 的电压。
12、膜片式联轴器的补偿原件是具有弹性的金属片,材料为【1Cr18Ni9】,可补偿【轴向】、【径向】和【角向】的偏差。
13、对于膜片式联轴器,当轴向的安装偏差接近1.4mm,角向偏差接近0.25°时,径向的安装偏差就不能超过【2.4mm】。
14、在兆瓦级机组上髙速轴端应用较多的联轴器有【膜片式联轴器】和【连杆式联轴器】。
15、连杆式联轴器利用【过载保护套】,当传递扭矩超过一定数值时可自动打滑,保护轴系免受损伤,并可自动复位工作。
连杆式联轴器利用连杆的绞接和橡胶及关节形非金属复合材料的可变形性补偿轴向、径向和角向偏差。
偏航气动理论及偏航结构风力发电机偏航状态的空气动力学基础由于风向的不断变化,风轮不能时刻保持其轴向与风向平行,这种状态称之为偏航状态。
偏航状态的风力发电机运行效率低于非偏航状态。
为了提高风力发电机的发电效率,水平轴风力发电机都配有偏航装置,用以改变风轮的方向,时刻保持风轮轴向与风向平行,使风力发电机达到最佳的工作状态。
传统的叶素-动量理论只考虑了风向与风轮平行使的情况,并不适用于偏航状态,因此需要对其修正以达到准确效果。
偏航时的动量定理动量定理通常用来研究风速与风作用在叶片上的力之间的关系,用以表现风轮对风能的转换效率问题,为了便于该问题的研究,现做出以下假设1 风轮为一平面圆盘,不考虑倾斜角。
2 空气无摩擦、无粘性3流过风轮的气流均匀4空气不可压缩,即空气密度不变。
将动量定理直接应用于处于偏航状态的风轮时是存在一定问题的。
对于未处于偏航状态的风力发电机风轮来说,实际上叶片在空间的诱导速度是不同的,在径向方向上是有一定变化的,而动量定理只能计算出平均的诱导速度。
对于处于偏航状态的风力发电机而言(见图),由于叶轮与风向间存在夹角,诱导速度将会在径向角与方位角间产生变化,难以对叶轮的特性进行估价。
现假设风速大小稳定,方向无变化(见下图),由于风向与叶轮间存在夹角r,随着叶片的旋转,每个叶片的攻角不断发生变化。
攻角的时刻变化会在风轮叶片产生轴向推力的同时还附带径向力引起偏航倾斜力矩。
当风向固定时,由动量定理可知轴向的动量变化率等于通过圆盘(致动盘)的质量变化率乘以垂直于风轮的速度变化率。
其质量变化率为,速度变化率为风力发电机偏航状态见图风中带有的动能为由上式可知风流过叶轮时带来的机械能为叶片作用在圆盘上的力为FRF式中,和分别为风轮迎风面与背风面的压力;为风轮的扫略面积;为风在无穷远处的速度;为空气的密度;为轴向诱导速度;为轴向平均诱导因数。
由上式可知,令我们称为风轮的推力系数,则风轮产生的功率为现定义风轮的风能利用系数为现要使风能系数达到最大,对上式轴向平均诱导系数求导,令其一阶导数为,即因此有在理想状态下,当风向与风轮轴之间的夹角为零度时,此时的风能利用系数最大该数据表明风机最大仅能利用风能的。