1哈密顿原理-新版.pdf
- 格式:pdf
- 大小:197.75 KB
- 文档页数:10

§7-4 哈密顿原理人们为了追求自然规律的统一、 和谐, 按照科学的审美观点, 总是力图用尽可能少的原理(即公理)去概括尽可能多的规律.牛顿提出的三个定律, 是力学的基本原理. 由这些基本原理出发, 经过严格的逻辑推理和数学演绎, 可以获得经典力学的整个理论框架.哈密顿原理是分析力学的基本原理, 它潜藏着经典力学的全部内容并把这门学科的所有命题统一起来. 也就是说, 由它出发, 亦可得到经典力学的整个框架.哈密顿原理是力学中的积分变分原理. 变分原理提供了一个准则, 使我们能从约束许可条件下的一切可能运动中, 将力学系统的真实运动挑选出来. 变分原理的这一思想, 不仅在力学中, 而且在物理学科的其他领域中, 都具有重要意义.一、变分法简介1. 函数的变分.自变量为x 的函数表示为)(x y y =.函数的微分x y y d d ′=是由自变量x 的变化引起的函数的变化.函数的变分也是函数的微变量, 但它不是因为自变量x 的变化, 而是由于函数形式的变化引起的.这种由于函数形式变化造成的函数的变更称为函数的变分, 记作y δ.与函数y 邻近但形式与y 不同的函数有许多, 这些函数可以表示如下:)()0,(),(*x x y x y εηε+= 其中ε是任意小的参数, ()x η是任意给定的可微函数. 因0=ε时()()x y x y =0,, 所以函数形式的变化决定于上式的第二项. 因此, 函数的变分写成()()()x x y x y y εηε=−=0,,δ*在自由度为1的力学系统中讨论变分的概念. 设广义坐标为q , )(t q q =. 建立以t q ,为轴的二维时空坐标系(又称事件空间), 曲线I 是)(t q q =的函数曲线, 代表了系统的真实运动.q t d d →函数的微分.在曲线I 附近, 存在着许多相邻曲线, 这些曲线都满足力学系统的约束条件, 称为可能运动曲线,它们的方程表示为()()()t t q t q εηε+=0,,*在t 不变的情况下, 函数形式的改变也能引起函数的变化, 这种变化纯粹是由函数形式变化引起的, 它就是函数的变分q δ,()()()t t q t q q εηεδ=−=0,,*与q d 不同, q δ与时间变化无关, 称为等时变分. r δ和αq δ都是等时变分.变分的运算法则在形式上与微分运算法则相同. 下面列出几条变分法则.设1y 和2y 是自变量x 的两个函数, 则()2121δδδy y y y +=+()122121δδδy y y y y y +=22211221δδδy y y y y y y −= 现给出第3式的证明:()22222211122122211121*2121δηεηεηεηεηε+−=−++=− =y y y y y y y y y y y y y y22211221δδδy y y y y y y −= 等时变分还有两个重要性质:(1)变分与微分的运算可以交换, 即δ和d 的运算可交换;(2)变分和微商在运算上可以交换, 即δ和t d /d 的运算可交换.首先证明性质(1):设力学系统的1=s ,q . 曲线 I 表示系统的真实运动, 曲线 II 表示与曲线I 邻近的系统的可能运动.Q Q P ′→→, Q ′点的纵坐标为()q q q q d δd +++. Q P P ′→′→, Q ′点的纵坐标成为()q q q q δd δ+++. 于是 ()()q q q q q q q q δd δd δd +++=+++()()q q δd d δ=证明完毕.下面证明性质(2): 因为()()()()2d d δd d δd d d δt t q q t t q −=由于等时变分, ()()0δd d δ==t t . 所以上式可写成()()q t t q t q δd d d d δd d δ==证明完毕.在变分法中, 除等时变分外, 还有全变分. 全变分是由于函数自变量和函数形式的共同变化引起的, 用q ∆表示.()()0,,*x y x x y y −∆+=∆εx xy y y ∆+=∆d d δ 2. 泛函的变分与泛函取极值的条件---欧拉方程.若变量J 由一组函数()x y y i i =, n i ,,2,1 =的选取而确定, 则变量J 称为函数()t y y i i =的泛函, 记作()()()],,,[21x y x y x y J n .泛函J 由n 个函数的形式确定, 是函数形式的函数.泛函与函数的概念不同, 函数中的自变量是数; 而对于泛函, 处于自变量地位的是可以变化的函数的形式.举例说明:Oxy 平面中有B A ,两个固定点, 连接两固定点间的曲线的长度L 由下式确定, ()x x y L AB x x d d /d 12∫+= 显然, L 依赖于函数()x y y =的选取, 若函数()x y 的形式发生变化, 则曲线的形状随之变化, 曲线的长度也跟着改变. 长度L 就是函数()x y的泛函.研究形式最简单的泛函及其变分, 该泛函只依赖一个函数()()[]x x x y x y F J x x d ,,10∫′= 或 ()()()()()[]x x x x y x x y F J x x d ,0,,0,10∫′+′+=ηεεηε 其中()()x x y x y d d =′被积函数()()[]x x y x y F ,,′的形式是已知的, 积分的上下限是固定的. 当函数()x y 在形式上发生变化时, 泛函就会发生变化, 这种由于函数形式的变化引起泛函的变化(线性部分)称为泛函的变分,记作J δ.现将被积函数()()()()[]x x x y x x y F F ,0,,0,ηεεη′+′+=在0=ε处展开(只保留线性部分)()()()()[]x x x y x x y F ,0,,0,ηεεη′+′+()()[]()()x y F x y F x x y x y F ηεεηεε′ ′∂∂+ ∂∂+′===00,, 可见函数的变分为()()()()[]()()[]x x y x y F x x x y x x y F F ,,,0,,0,δ′−′+′+=ηεεη()()x y F x y F ηεεηεε′ ′∂∂+ ∂∂===00 y y F y y F ′ ′∂∂+ ∂∂===δδ00εεF 的变分是在0δ=x 的情况下进行的. 在力学中, x 为时间t , 这种变分是等时变分.现将J δ写成()()()()[]()()[]∫∫′−′+′+=1010d ,,d ,0,,0,δx x x x x x x y x y F x x x x y x x y F J ηεεη ()()()()[]()()[]{}∫′−′+′+=10d ,,,0,,0,x x x x x y x y F x x x y x x y F ηεεη∫=10d δx x x F 上式表明当积分变量与变分无关时, 变分算符和积分算符可以交换.在数学中, 变分法的基本问题是通过求泛函的极值(极大值, 或极小值, 或稳定值)去寻找函数)(x y . 泛函中的函数)(x y 的形式需不断改变, 直到J 达到极值. 当J 为极值时, )(x y 就是我们所要寻找的函数.泛函取极值的必要条件是满足欧拉方程. 推出欧拉方程:与函数极值条件类似, 处于极值的泛函, 其变分一定为零, 即()()[]x x x y x y F J x x d ,,δδ10∫′= ()()[]x x x y x y F x x d ,,δ10∫′= 0d δδ10= ′′∂∂+∂∂=∫x y y F y y F x x 考虑到()y x y δd d δ=′, 并对上式中的第二项采用分部积分法()x y y F x y y F x x y x y F x y y F x x x x x x d δd d δd d d δd d d δ101010∫∫∫ ′∂∂− ′∂∂=′∂∂=′′∂∂ 积分上下限是固定的, 即要求各函数曲线有相同的端点, 0δδ10==x x y y , 所以上式第一项 0δd δd d 1010=′∂∂= ′∂∂∫x x x x y y F x y y F x 故0d δ)d d (10=′∂∂−∂∂∫x y y F x y F x xεη=y δ, 由于η是任意函数, 所以y δ也是任意的. 可见, 要使上式成立, 必须0d d =′∂∂−∂∂y F x y F 这就是欧拉方程.可推广到多个函数为变量的泛函中去, 该泛函取极值的欧拉方程为0d d =′∂∂−∂∂ββy F x y F l ,,2,1 =β l 代表函数的个数.3. 变分问题.凡是与求泛函极值有关的问题都称做变分问题. 下面列举3个曾在变分法的发展中起过重要影响的变分问题.(1) 最速落径问题. 通过求泛函极值, 得知竖直平面内不在同一铅垂线上的两个固定点之间的多条曲线中, 能使质点以最短时间从高位置点到低位置点自由滑下的曲线是旋轮线(又称摆线).(2) 短程线问题. 已知曲面方程, 用求泛函极值的方法, 可得出曲面上两固定点之间长度最短的线.(3) 等周问题. 将泛函求极值, 可得知一平面内, 长度一定的封闭曲线, 所围面积最大的曲线是圆.例题6 最速落径问题.(有兴趣者自学)二、哈密顿原理1. 位形空间、 真实运动曲线和可能运动曲线.在分析力学中, 由s 个广义坐标s q q q ,,,21 组成的s 维空间称为位形空间.系统某一时刻的位形(即由广义坐标确定的系统的位置)与该空间中的一点相对应. 当位形随时间变化时(时间t 为参数), 位形点就会发生变化而形成一条曲线.用位形空间研究完整系的运动, 不用顾及约束对系统运动的影响. 因为空间由s 个广义坐标轴组成, 每一个广义坐标都可以自由变化. 位形空间中的任何一条曲线, 都表示系统在完整约束下的一种可能的运动过程.设s t q q ,,2,1),( ==ααα代表系统的真实运动, 则由它们决定的曲线称为真实运动曲线.由于函数)(t q q αα=形式发生变化而在真实曲线邻近出现的曲线称为可能运动曲线.2. 完整有势系统的哈密顿原理.哈密顿原理是分析力学中的积分变分原理, 它巧妙地运用泛函求极值的方法, 将真实运动从约束允许的一切可能运动中挑选出来.哈密顿原理是一条力学公理.首先, 定义一个称为作用量的泛函:()∫=10d ,,t t t t q q L S αα 式中的L 称为拉格朗日函数, 定义为V T L −=T 是力学系统相对惯性系的动能),,(t qq T T αα =; 势能),(t q V V α=. 拉格朗日函数是ααqq ,和t 的函数, ),,(t qq L L αα =. 假定位形空间中有两个固定点A 和B , 与A 点相对应的时刻是0t , 与B 点相对应的时刻是1t .两个固定点之间, 存在着由s t q q ,,2,1),( ==ααα决定的真实运动曲线.两固定点B A ,间还存在许多与真实运动曲线邻近的可能运动曲线, 它们是由q q q δ*+=αα s ,,2,1 =α0δδ10====t t t t q q αα s ,,2,1 =α决定的.作用量是依赖于函数)(t q α的泛函. 在位形空间的两个固定点间有许多可能运动轨道, 其中有一条是真实的. 哈密顿原理就是通过变分法中求泛函(在此指作用量)极值的方法, 将真实运动从这许多的可能运动中挑选出来的.哈密顿原理的内容是: 受完整约束的有势系, 在位形空间中, 相同时间内通过两位形点间的一切可能运动曲线中, 真实运动曲线使作用量取极值. (极值为极小值, 故此原理又称为哈密顿最小作用量原理)在哈密顿原理中, 一切可能运动必须具有以下共同的特点:(1) 都是同一系统在相同的约束条件下的可能运动;(2) 都是在时刻0t 和时刻1t 之间相同时间间隔内完成的运动;(3) 在位形空间中有相同的起点和终点, 即 0δδ10====t t t t q q ααs ,,2,1 =α哈密顿原理的数学表述:在位形空间内, 当s q q t t t t ,,2,1,0δδ10 =====ααα时, 对于受完整约束的有势系, 其真实运动使 ()0,,δδ10==∫t t t q q L S αα 综上所述, 当作用量泛函取极值时, 与该作用量所对应的位形空间曲线就是真实运动的曲线, 描绘该曲线的s 个函数)(t q q αα=就是真实运动的运动学方程.拉格朗日函数V T L −=是力学系统的特征函数.如果确定了系统的拉格朗日函数, 则通过哈密顿原理, 就可导出力学系统的动力学方程.由欧拉方程可以得到分析力学中有势系的普遍方程---拉格朗日方程, 我们将在下一章讨论这个问题.[拉格朗日函数不是惟一确定的. 设f 是一个任意广义坐标和时间的函数, 即),(t q f f α=, 设),(d d t q f tL L α+=′, 则∫∫=′1010d d t t t t t L t L δδ. 证明了在原有拉格朗日函数上加上一项广义坐标和时间的任意函数对时间的全微商, 是不会改变系统的运动方程的. 这种不变性称做规范变换不变性, 它对于现代理论物理的研究有重要意义.]例题 7 质量为m 的质点, 在重力场中以与水平线成α角的初速率v 抛射, 根据哈密顿原理, 求质点的运动微分方程.解 在抛射体运动的平面内, 以铅垂方向为y 轴, 建立直角坐标系Oxyz , 以y x ,作为质点的广义坐标. 拉格朗日函数为()mgy y x m L −+=2221 作用量为()t mgy y x m t L S t t t t d 21d 101022∫∫ −+== 根据哈密顿原理, 真实运动使()[]0d δδδδ10=−+=∫t y mg y y m x x m S t t ()∫∫∫−==10101010d δδd δd d d δt t t t t t t t t x x m x x m t x tx m t x x m ()∫∫∫−==10101010d δδd δd d d δt t t t t t t t t y y m y y m t y ty m t y y m 由于在10,t t 时刻, 0δδ==y x , 因此 ()[]∫=+−−=100d δδδt t t y mg y m x x m S 又因x δ和y δ是相互独立的, 所以要使上式成立, 必须0=xm 0=+mg ym 3. 一般完整系的哈密顿原理.对一般完整系, 主动力常含有非有势力, 上述哈密顿原理不再适用, 但可以将有势系的哈密顿原理的表达式经修改后推广到一般完整系中:即在位形空间中, 一般完整系的真实运动使0d δδ101= +∫∑=t q Q T t t S ααα 式中T 是系统的动能, αQ 是与广义坐标αq 对应的广义力.[ααq r F Q i ni i ∂∂⋅=∑= 1] 在下一章里, 我们将会根据一般完整系的哈密顿原理, 推导出一般完整系普遍适用的动力学方程, 即一般形式的拉格朗日方程.在物理学的研究中, 对于我们重要的是有势系的哈密顿原理.哈密顿原理具有统一的、简洁完美的形式, 即具有坐标变换的不变性, 从而使哈密顿原理具有很大的普适性.哈密顿原理——有限自由度——无限自由度.哈密顿原理——物理学其他领域.哈密顿原理还可用于创建新的理论, 根据实验结果和假设构造出拉格朗日函数, 便可用哈密顿原理导出运动方程, 其正确性由实践检验.哈密顿原理是作为公理提出的, 并未推证. 它们的正确性由原理演绎出的推论在实践中的检验而得到证实. ——完全不依赖牛顿定律, 它的适用条件也完全不受牛顿定律适用条件的限制, 其普适性比牛顿的运动定律大得多.。

第四章哈密顿原理
4.1 泛函与变分、欧拉方程
4.2 哈密顿原理
4.3 由哈密顿原理推导动力学方程
概述
1. 哈密顿原理是变分原理的一种,是分析力学的基本原理,可以作为整个理论的基础。
2. 变分原理提供了将真实运动与在相同条件下的可能运动相区分的准则。
所谓的相同条件由不同的原理所规定。
3. 更加适于发展近似方法。
复合函数:设函数x(t) 是自变量t 的函数,而函数f(x) 是x 的函数,则f[x(t)] 是复合函数。
泛函:如果函数x(t) 的形式可在一定范围内变化,称为自变函数,而F(x) 定义在自变函数x 上,其值随自变函数的形式不同而变化,则称F(x) 为定义在函数集{x} 上的泛函。
自变函数x 的容许集称为泛函F 的定义域。
区别:泛函F 的值依赖于函数x 的形式,而函数f 的取值依赖于自变量t 的值。
上述哈密顿原理具有一个强的约束条件,即系统在有限动力学过程的始末位形给定。
实际的系统运动是一个渐进的动力学过程,其末了的位形是难以事先确定的。
需要放松上述哈密顿原理对于系统始末位形给定的限制,得到哈密顿原理更一般的形式。

哈密顿原理文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]牛顿质点动力学1 牛顿第二定律 dtd pf从三个方面来应用:全局性研究:对称性、守恒律、稳定性; 局部研究:平均值、动量定理、动能定理; 瞬时研究:极限求导、奇异性、突变性;2 重点研究非惯性、矢量性、连续性、相对性的问题;3 从动力学观点上升到能量的观点。
哈密顿原理、保守力及其势4 五大类典型模型 概括:一个原理:哈密顿原理(稳定性与对称性原理); 二种建模方法:动力学方法、能量法;三类研究方法:对称性方法(全局)、平均值方法(局部) 求极限、求导、突变及奇异性研究方法(瞬时);四大重点问题:矢量性(矢量空间法)、连续性(微元动力学法)、相对性(相对速度公式法)、非惯性(等效性法);五项典型模型:准粒子模型、碰撞模型、势模型、相空间模型、简谐振动与波模型。
(科学计算技术与研究式的学习模式)哈密顿原理、对称性和稳定性1.拉格朗日函数和哈密顿量 拉格朗日函数L对于一个物理系统,可用一个称为拉格朗日函数的量),,(t qq L i i 来描述,其中i q 是广义坐标,=i qdt dq i /是广义速度;广义坐标与通常所说的坐标区别在于,广义坐标是针对系统的自由度确定的,譬如一个质点限制在半径R 的球面上运动,其坐标显然有x 、y 、z 三个,但广义坐标只有φθ,两个,其中ϕθcos sin R x =,θϕθcos ,sin sin R z b R y ==;一般由于运动受到约束,坐标与广义坐标的数量是不相等的,仅在无约束条件下,坐标与广义坐标的数目才是一样的,与坐标一样广义坐标的选取也不是唯一的。
在保守力作用下,系统的拉格朗日量L 定义为动能与势能之差;U T L -=哈密顿量H物理系统还可以用一个称之为哈密顿量的函数描述,在保守力作用下,哈密顿量定义为系统的动能与势能之和),,(t p q H i i =U T +(i=1,2…s )其中)(/i i qL p ∂∂=是广义动量,哈密顿量是广义坐标和广义动量的函数,在直角坐标下对于质点运动的广义动量可写成v p m =。

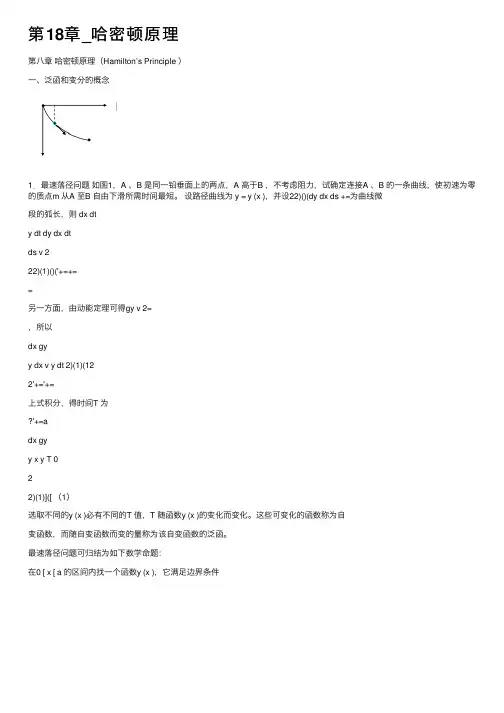
第18章_哈密顿原理第⼋章哈密顿原理(Hamilton’s Principle )⼀、泛函和变分的概念1.最速落径问题如图1,A 、B 是同⼀铅垂⾯上的两点,A ⾼于B ,不考虑阻⼒,试确定连接A 、B 的⼀条曲线,使初速为零的质点m 从A ⾄B ⾃由下滑所需时间最短。
设路径曲线为 y = y (x ),并设22)()(dy dx ds +=为曲线微段的弧长,则 dx dty dt dy dx dtds v 222)(1)()('+=+==另⼀⽅⾯,由动能定理可得gy v 2=,所以dx gyy dx v y dt 2)(1)(122'+='+=上式积分,得时间T 为'+=adx gyy x y T 022)(1)]([ (1)选取不同的y (x )必有不同的T 值,T 随函数y (x )的变化⽽变化。
这些可变化的函数称为⾃变函数,⽽随⾃变函数⽽变的量称为该⾃变函数的泛函。
最速落径问题可归结为如下数学命题:在0 [ x [ a 的区间内找⼀个函数y (x ),它满⾜边界条件====b y a x y x 时,当时,当00 并使(1)式所给泛函T [y (x )]取极⼩值。
变分法就是研究在各种不同的边界和约束下,各种泛函取极值的必要充分条件。
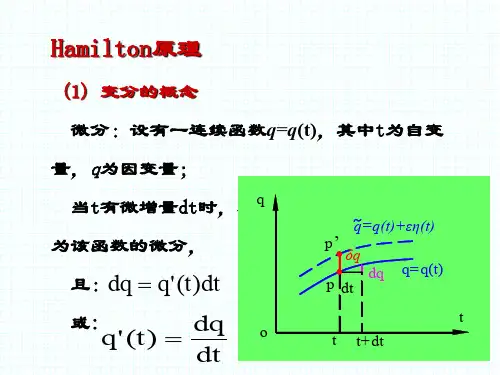
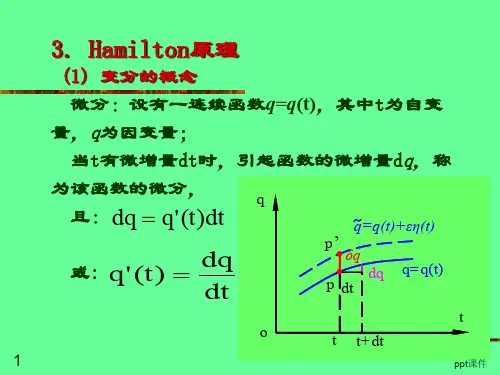
2.⾃变函数的变分如图2,将⾃变函数曲线 y = y (x ) 作微⼩变更,得到另⼀曲线y * = y * (x ),⽽ y * = y * (x ) = y (x ) + δ y (x )其中δ y 称为⾃变函数的变分。
下⾯推导d 、δ交换法则。
由图2,有dyy y dy y y yy y yy '+=+=+==321δ若从点3向上算,有)()(334dy y dy y dy y dy y y y y δδδδ+++=+++=+= 若从点2向上算,有)()(224y d dy y y y y d y y dy y y δδδδ+++=+++=+= ⽐较以上两式,得)()(dy y d δδ= (2)因此,⾃变函数变分、微分的运算顺序可交换。
牛顿质点动力学1 牛顿第二定律 dtd p f 从三个方面来应用:全局性研究:对称性、守恒律、稳定性;局部研究:平均值、动量定理、动能定理;瞬时研究:极限求导、奇异性、突变性;2 重点研究非惯性、矢量性、连续性、相对性的问题;3 从动力学观点上升到能量的观点。
哈密顿原理、保守力及其势4 五大类典型模型概括:一个原理:哈密顿原理(稳定性与对称性原理);二种建模方法:动力学方法、能量法;三类研究方法:对称性方法(全局)、平均值方法(局部) 求极限、求导、突变及奇异性研究方法(瞬时);四大重点问题:矢量性(矢量空间法)、连续性(微元动力学法)、相对性(相对速度公式法)、非惯性(等效性法); 五项典型模型:准粒子模型、碰撞模型、势模型、相空间模型、简谐振动与波模型。
(科学计算技术与研究式的学习模式)哈密顿原理、对称性和稳定性1.拉格朗日函数和哈密顿量拉格朗日函数L对于一个物理系统,可用一个称为拉格朗日函数的量),,(t qq L i i 来描述,其中i q 是广义坐标,=i q dt dq i /是广义速度;广义坐标与通常所说的坐标区别在于,广义坐标是针对系统的自由度确定的,譬如一个质点限制在半径R 的球面上运动,其坐标显然有x 、y 、z 三个,但广义坐标只有φθ,两个,其中ϕθcos sin R x =,θϕθcos ,sin sin R z b R y ==;一般由于运动受到约束,坐标与广义坐标的数量是不相等的,仅在无约束条件下,坐标与广义坐标的数目才是一样的,与坐标一样广义坐标的选取也不是唯一的。
在保守力作用下,系统的拉格朗日量L 定义为动能与势能之差;U T L -=哈密顿量H物理系统还可以用一个称之为哈密顿量的函数描述,在保守力作用下,哈密顿量定义为系统的动能与势能之和),,(t p q H i i =U T +(i=1,2…s )其中)(/i i qL p ∂∂=是广义动量,哈密顿量是广义坐标和广义动量的函数,在直角坐标下对于质点运动的广义动量可写成v p m =。
牛顿质点动力学1 牛顿第二定律dtd p f从三个方面来应用:全局性研究:对称性、守恒律、稳定性;局部研究:平均值、动量定理、动能定理;瞬时研究:极限求导、奇异性、突变性;2 重点研究非惯性、矢量性、连续性、相对性的问题;3 从动力学观点上升到能量的观点。
哈密顿原理、保守力及其势4 五大类典型模型概括:一个原理:哈密顿原理(稳定性与对称性原理);哈密顿原理的文字表述如下:保守的、完整的力学体系在相同时间内,由某一初位形转移到另一已知位形的一切可能运动中,真实运动的主函数具有稳定值,即对于真实运动来讲,主函数的变分等于0。
二种建模方法:动力学方法、能量法;三类研究方法:对称性方法(全局)、平均值方法(局部)求极限、求导、突变及奇异性研究方法(瞬时);四大重点问题:矢量性(矢量空间法)、连续性(微元动力学法)、相对性(相对速度公式法)、非惯性(等效性法);五项典型模型:准粒子模型、碰撞模型、势模型、相空间模型、简谐振动与波模型。
(科学计算技术与研究式的学习模式)哈密顿原理、对称性和稳定性1.拉格朗日函数和哈密顿量拉格朗日函数L对于一个物理系统,可用一个称为拉格朗日函数的量),,(t q q L i i 来描述,其中i q 是广义坐标,iq dt dq i /是广义速度;广义坐标与通常所说的坐标区别在于,广义坐标是针对系统的自由度确定的,譬如一个质点限制在半径R 的球面上运动,其坐标显然有x 、y 、z 三个,但广义坐标只有,两个,其中cos sin R x,cos ,sin sin R zb R y;一般由于运动受到约束,坐标与广义坐标的数量是不相等的,仅在无约束条件下,坐标与广义坐标的数目才是一样的,与坐标一样广义坐标的选取也不是唯一的。
在保守力作用下,系统的拉格朗日量L 定义为动能与势能之差;UT L 哈密顿量H物理系统还可以用一个称之为哈密顿量的函数描述,在保守力作用下,哈密顿量定义为系统的动能与势能之和),,(t p q H i i =U T(i=1,2…s )其中)(/i iq L p 是广义动量,哈密顿量是广义坐标和广义动量的函数,在直角坐标下对于质点运动的广义动量可写成v pm 。
作用量I定义为21t t LdtI其中,积分上下限是质点初末态I q 、F q 对应的时间。
2.哈密顿原理及轨道稳定性哈密顿原理指出:当系统由I q 演化到F q ,其真实的轨道总是满足作用量I取极值的条件。
具体来讲,当给予广义坐标和速度一个无穷小扰动i q 、)/(dt dq i ,而作用量十分稳定,不受扰动,即δI=0。
因此哈密顿原理的实质就是轨道的稳定性原理,质点从I q 运动到Fq 总是选择一条最稳定的轨道。
其次,I 在扰动下是不变量,所以哈密顿原理也是一个对称性原理;总之哈密顿原理是物理学的最高原理。
考察空间平移的对称性,设一个系统由两个粒子组成,它们只限于在具有空间平移对称性的x 轴上运动,设两粒子坐标为x1和x2,系统的势能),(21x x E E P P,当体系发生一平移x 时,两粒子坐标变为:x x x x x x 2211,,但两粒子的相对距离未变,即x x x x x x1212,空间平移对称性意味着势能与x 无关。
此外,两粒子在相互作用势能下,所受的力xE x x xE x E f P P P 111xE x x xE x E f P P P 222所以021f f ,即作用力等于反作用力的牛顿第三定律成立,故有动量守恒。
一般可以表述为:系统的哈密顿量在空间坐标平移下保持不变,称系统具有空间平移对称性,它对应着动量守恒律。
3.哈密顿正则方程当以变数),(i i p q 为参数时,由哈密顿原理可以得到一组哈密顿正则方程:i i q H dt dp //ii p H dt dq //例如一个一维弹簧振子的哈密顿量2/2/22kx mp H正则方程为:kxxH dt dp //mp p H dt dx ///其中m p dtdx //即动量的定义,而kx dt dp /是一维简谐振子的牛顿方程;一般情况下,哈密顿正则方程组的第一个方程是牛顿方程,第二个方程是动量的定义。
例1、弹簧连接体:如右图所示,用轻弹簧联接的两个质量同为m 的滑块放置在光滑的水平桌面上,试用能量法建立动力学方程。
解:系统的动能mP mP T2/2/222111x m P 、22x m P 分别为两滑块的动量系统的弹性势能212)(21l x x k U,其中k 是弹簧的劲度系数,l 是弹簧的原长;哈密顿量正则方程引力势模型mP P H dtdx l x x k x HdtdP m P P H dt dx l x x k x H dt dP 22212221111211),(,)(2122221)(2122l x x k mPm PHm1x 2x kl图2-3-10Java 学件弹簧连接体图2-3-11Java 学件行星运动质量为m 的粒子在中心引力势r B /作用下如何运动,其中GMm B ,G 是万有引力常数,M 为中心天体的质量。
在平面极坐标下粒子的哈密顿量rB mp mrLrB mHr2222222p径向动能2222)(21)(212ddr mdt dr m mp r242)(21ddr rm L其中4242222mrLrm Imm;2221mrL是横向动能,2222222221/2121mrLrII mmr。
由总能量守恒和角动量守恒22222rL rmB mEp r22222rm LmrB mE dtdr 又dtd θmrL2即Ld mr dt /2于是22222)/(2122rL r B Em LrL BmrmErr ddr22)/(2Lr B Emr r Ldrd22222arcsinmELmB r LBmr )sin(211)/(222mB ELBm L r取2/,cos)sin(则cos1cos 211)/(222p mB EL Bm L r讨论:1)0,0E 双曲线轨道;2)1,0E 抛物线轨道;3)1,0E 椭圆轨道,其中,)2/(22L m B E;4))2/(22L m B E,圆轨道;开普勒定律参考源程序static Point3f p0,p,p1,p2[3200],p3,S[2],m_path[50];Orient direct = {0.0f, 90};static Color4f color = {1.0f, 1.0f, 1.0f, 1.0f}, color1 = {0.0f, 0.0f, 1.0f, 0.9f};static float a,b,c,T,s,e,r0,ll;static float m_sita,t,dt,st,sita,dsita;void demoApp::RenderScene(int sceneIndex){int i,j;a=P_radius; b=P_omega; T=V;title.Show(30.0f, 0.0f, 60.0f);title1.Show(55.0f, 0.0f, 45.0f);c=2*3.14*a*b/T; //单位时间扫过面积e=pow((1-b*b/a/a),0.5); //偏心率r0=pow(b,2)/a;s=pow(a*a-b*b,0.5);ll=c/500.0; //角动量守恒量p0.x=0; p0.y=0; p0.z=-30;p.x=0; p.y=-s/2; p.z=-30; //太阳在焦点p3.x=0; p3.y=-s/2; p3.z=ll;S[0].x=p.x; S[0].y=p.y; S[0].z=p.z;glt::EnableLight();draw::Arrow3D(p, p3, 0.0, 0.5, 10, 2, color, color, false,0,0,0);tex.EnableTexture(); //贴图glt::BeginTransform();glt::ZTransform(S[0], direct, step); // 中心center,轴向direct,旋进角0draw::Sphere(8, color, 32, 31); // 太阳球体,半径r,经线分段数32,纬线分段数31glt::EndTransform();t=0;sita=0;for(i=0;i<step+1;i++){dt=0.01;dsita=c/pow(r0/(1-0.5*e*cos(sita)),2)*dt;sita=sita+dsita; // dsita/dt=c/mr 2t=t+dt;p2[i].x=p0.x+b*cos(1.57+sita);//初始出发点p2[i].y=p0.y+a*sin(1.57+sita);p2[i].z=-30;S[1].x=p2[i].x; S[1].y=p2[i].y; S[1].z=p2[i].z;glt::SetLineWidth(3);if(i>0)draw::Line(p2[i-1],p2[i],cRED);glt::SetLineWidth(6);if((i>step-30)&&(step>30))draw::Line(p,p2[i],color1);}tex.DisableTexture();glt::BeginTransform();glt::ZTransform(S[1], direct, 0); // 中心center,轴向direct,旋进角0draw::Sphere(4, color1, 11, 11); // 球体,半径r,经线分段数32,纬线分段数31glt::EndTransform();}。