磁悬浮小球 哈工大控制
- 格式:doc
- 大小:1.20 MB
- 文档页数:35
基于DSP的磁悬浮球模糊PID数字控制器
邱洪;黄苏丹;曹广忠
【期刊名称】《武汉理工大学学报(信息与管理工程版)》
【年(卷),期】2009(031)006
【摘要】给出了磁悬浮球系统的工作原理及其数学模型, 阐述了模糊PID控制器的设计方法, 设计了以DSP为核心的磁悬浮球模糊PID数字控制器并进行实验, 实现了钢球的稳定悬浮.结果表明, 该系统具有良好的控制效果.
【总页数】4页(P933-936)
【作者】邱洪;黄苏丹;曹广忠
【作者单位】深圳大学机电与控制工程学院,广东,深圳,518060;深圳大学机电与控制工程学院,广东,深圳,518060;深圳大学机电与控制工程学院,广东,深圳,518060【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于DSP的磁悬浮轴承数字控制器 [J], 刘祥;李玉霞;李敏花
2.基于TMS320F28335DSP的磁悬浮系统数字控制器研究 [J], 姜宏伟;谢振宇
3.基于DSP和CPLD的主动磁悬浮轴承数字控制器 [J], 薛晓艳;谷志锋;刘文胜;李杰
4.基于DSP的磁悬浮轴承数字控制器 [J], 吴明贵;汪希平;吴国庆;王澄泓;董鲁宁;张爱林
5.基于TMS320F28335DSP的磁悬浮轴承数字控制器的研究与设计 [J], 郭凯旋;徐龙祥
因版权原因,仅展示原文概要,查看原文内容请购买。
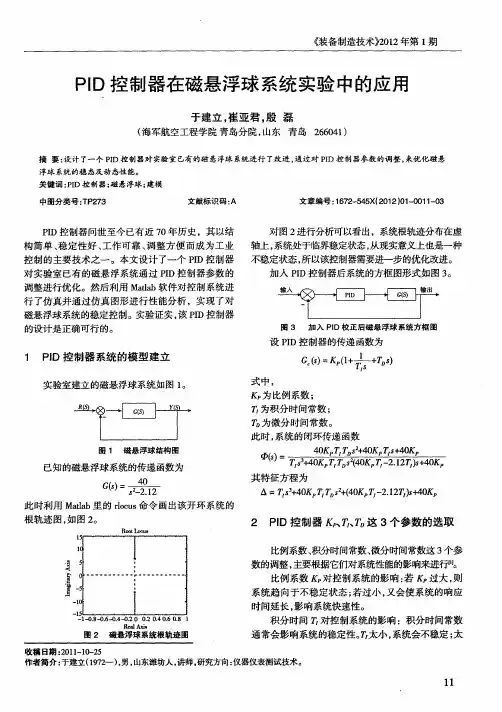
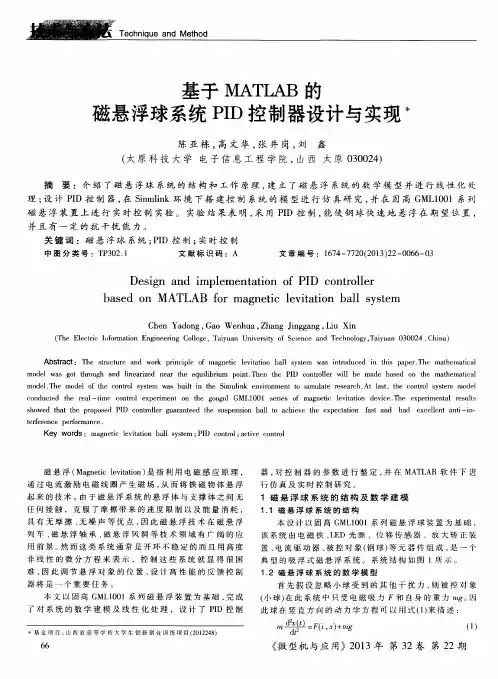
基于MATLAB的磁悬浮球系统PID控制器设计与实现陈亚栋;高文华;张井岗;刘鑫【期刊名称】《微型机与应用》【年(卷),期】2013(32)22【摘要】The structure and work principle of magnetic levitation ball system was introduced in this paper . The mathematical model was got through and linearized near the equilibrium point . Then the PID controller will be made based on the mathematical model . The model of the control system was built in the Simulink environment to simulate research . At last , the control system model conducted the real-time control experiment on the googol GML1001 series of magnetic levitation device . The experimental results showed that the proposed PID controller guaranteed the suspension ball to achieve the expectation fast and had excellent anti-in-terference performance .%介绍了磁悬浮球系统的结构和工作原理,建立了磁悬浮系统的数学模型并进行线性化处理;设计 PID 控制器,在 Simulink 环境下搭建控制系统的模型进行仿真研究,并在固高 GML1001系列磁悬浮装置上进行实时控制实验。
Fuzzy-PID控制算法在磁悬浮系统中的应用
刘德生;尹力明;佘龙华
【期刊名称】《计算机测量与控制》
【年(卷),期】2002(010)006
【摘要】磁悬浮系统是典型的非线性迟滞系统,应用常规的PID控制难以实现有效控制.本文针对磁悬浮系统的特点,采用Fuzzy-PID复合控制模型,应用模糊推理功能实现PID参数的自整定,对磁悬浮球系统进行控制,得到了理想的控制效果.
【总页数】3页(P375-377)
【作者】刘德生;尹力明;佘龙华
【作者单位】国防科技大学,机电工程与自动化学院,湖南,长沙,410073;国防科技大学,机电工程与自动化学院,湖南,长沙,410073;国防科技大学,机电工程与自动化学院,湖南,长沙,410073
【正文语种】中文
【中图分类】TP273
【相关文献】
1.Fuzzy-PID控制算法在永磁电磁混合悬浮系统中的应用 [J], 梁中华;吴红波;杨霞;李庆江
2.基于Smith补偿的喷雾干燥塔Fuzzy-PID控制算法 [J], 管丰年
3.H¥与滑模融合控制算法在磁悬浮系统中的应用 [J], 李丹丹;何荣卜;张彩红
4.磁悬浮系统的加速度计反馈控制算法 [J], 张锟;崔鹏;李杰
5.模糊PID控制算法在磁悬浮系统中的应用 [J], 吴东月;田国胜
因版权原因,仅展示原文概要,查看原文内容请购买。
【关键字】系统Harbin Institute of Technology课程设计论文课程名称:自动控制元件及线路设计题目:捡乒乓球机器人小车的设计院系:航天学院控制科学与工程系班级:1304105班设计者:杨明阳01徐云飞02姚晨蔚16指导教师:马广程设计时间:2016年3-5月捡乒乓球机器人小车摘要:随着科学技术的日益发展,越来越多的科技被应用在了生活的方方面面。
当然也包括运动赛场上,帮助选手以及裁判解决一部分的麻烦,使得比赛进行的更加流畅。
这里为解决乒乓球比赛上乒乓球的捡取问题,设计了一种以单片机作为主控制器的自动捡球机器人。
该捡球机器人采用风扇产生的吸力来实现捡球;利用超声波传感器实现对乒乓球的自动识别;通过红外传感器监测周围环境,实现自动躲障。
本系统会在裁判对每一个球做出判决后开始工作,先按照预定路线绕场地前进,同时在行进过程中利用传感器寻找掉落的小球。
当找到目标并确认后,改变预定路线转而向目标前进,最终捡起乒乓球,之后再回到原点。
完成捡球功能,保证比赛的连续性。
关键词:捡乒乓球机器人超声波传感器红外传感器过程控制目录1.功能设计----------------------------------------------------------42.系统的性能指标和技术要求------------------------------------------43.背景及意义--------------------------------------------------------44.系统的总体结构与设计方案------------------------------------------54.1 预定路线前进---------------------------------------------------64.2 目标寻找-------------------------------------------------------74.3 捡起目标乒乓球-------------------------------------------------94.4 判断乒乓球是否捡起---------------------------------------------94.5 绕开障碍-------------------------------------------------------94.6 返回原点------------------------------------------------------105.执行元件---------------------------------------------------------105.1 行进电机的选择------------------------------------------------105.1.1 直流伺服电机结构-------------------------------------------105.1.2 直流伺服电机驱动原理---------------------------------------115.1.3 直流伺服电机的分类及特点-----------------------------------115.1.4 指标的计算和直流伺服电机的选择-----------------------------125.1.5 直流伺服电机调速-------------------------------------------15直流伺服电机调速原理------------------------------------15直流速度控制方式----------------------------------------155.2 捡球装置的选择------------------------------------------------225.2.1 捡球原理级实现---------------------------------------------235.2.2 吸球管设计-------------------------------------------------246.测量元件---------------------------------------------------------266.1 测速传感器的选取----------------------------------------------266.1.1 三种传感器的对比分析---------------------------------------266.1.2 对光电编码器的论证分析和选取-------------------------------286.2 位置和躲障传感器的选取----------------------------------------346.2.1 常用传感器及特点-------------------------------------------346.2.2 根据超声传感器实现定位和物体识别---------------------------366.2.3 根据红外感器实现障碍躲躲-----------------------------------416.3 根据红外传感器实现捡球信号的反馈------------------------------446.4 传感器设计中的缺陷及可改进的地方------------------------------456.4.1 传感器设计中的缺陷-----------------------------------------456.4.2 传感器设计中可改进的部分-----------------------------------457.单片机-----------------------------------------------------------467.1 常用单片机----------------------------------------------------467.2 单片机选型----------------------------------------------------477.3 所选单片机特点及可行性----------------------------------------478.系统硬件清单-----------------------------------------------------489.自评-------------------------------------------------------------48 9.1 优点----------------------------------------------------------489.2 缺点以及不足--------------------------------------------------4910.分工------------------------------------------------------------4911.心得体会--------------------------------------------------------50参考文献-----------------------------------------------------------50一、功能设计1.裁判做出判决后自行定位乒乓球掉落位置2.迅速移动至掉落乒乓球所在位置3.捡起乒乓球,并回到起点4.行进过程中躲避场地选手以及其他人员或障碍5.利用尺寸确认目标乒乓球二、系统的性能指标和技术要求1.机器人移动至乒乓球顶点位置精度±3cm2.机器人移动速度≤2 m/s3.紧急刹车时间≤0.3s4.总捡球时间≤21s5.判断乒乓球是否捡起6.能够辨认出乒乓球和障碍物三、背景及意义随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。
现代控制理论基础上机实验报告之一亚微米超精密车床震动控制系统的状态空间法设计院系航天学院专业姓名班号指导教师哈尔滨工业大学2014年05月14日1.系统的工程背景及物理描述(1)工程背景超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz左右。
这种被动隔振方法难以满足超精密加工对隔振系统的要求。
为了解决这个问题,有必要研究被动隔振和主动隔振控制相结合的混合控制技术。
其中,主动隔振控制系统采用状态空间法设计,这就是本次上机实验的工程背景。
(2)物理描述上图表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。
上图表示一个单自由度振动系统,空气弹簧具有一般弹性支承的低通滤波特性,其主要作用是隔离较高频率的基础振动,并支承机床系统;主动隔振系统具有高通滤波特性,其主要作用是有效地隔离较低频率的基础振动。
主、被动隔振系统相结合可有效地隔离整个频率范围内的振动。
床身质量的运动方程为:p a 0ms F F ++= (1)p F ——空气弹簧所产生的被动控制力;a F ——作动器所产生的主动控制力。
假设空气弹簧内为绝热过程,则被动控制力可以表示为:p 0r r r e e {1[/()]}n F cy k y p V V A y A =++-+ (2)r V ——标准压力下的空气弹簧体积;0y s s =-——相对位移(被控制量);r p ——空气弹簧的参考压力;r A ——参考压力下单一弹簧的面积;e r 4A A =——参考压力下空气弹簧的总面积; n ——绝热系数。
电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。
基于LQR的小卫星磁姿态控制设计
郭延宁;李传江;马广富
【期刊名称】《空间控制技术与应用》
【年(卷),期】2008(034)005
【摘要】研究仅采用磁力矩器作为执行机构的近地小卫星姿态控制问题.通过对刚体卫星的非线性动力学和运动学方程在平衡点处进行线性化处理,得到一个线性周期时变系统,应用线性二次最优调节器理论设计出最优磁矩控制律.最后针对某小卫星进行了仿真验证,结果表明所设计的最优控制律可以很好地完成三轴姿态稳定任务.
【总页数】4页(P61-64)
【作者】郭延宁;李传江;马广富
【作者单位】哈尔滨工业大学控制科学与工程系,哈尔滨150001;哈尔滨工业大学控制科学与工程系,哈尔滨150001;哈尔滨工业大学控制科学与工程系,哈尔滨150001
【正文语种】中文
【中图分类】V448.2
【相关文献】
1.基于切变流形函数和模糊控制的微小卫星姿态磁控制 [J], 李太玉;张育林
2.基于H∞理论的微小卫星姿态磁控制 [J], 李太玉;张育林
3.基于主动磁控制的微小卫星姿态控制 [J], 张锐;谢祥华;张静
4.磁控小卫星周期时变的比例微分控制设计方法 [J], 王平;李铁寿
5.磁控小卫星周期时变PD控制设计方法 [J], 王平;李铁寿
因版权原因,仅展示原文概要,查看原文内容请购买。
基于神经网络的磁悬浮球自适应控制器
许杰;刘春生
【期刊名称】《机电工程》
【年(卷),期】2007(024)003
【摘要】建立了磁悬浮球系统的数学模型,讨论了系统的刚度阻尼和控制系统之间的关系,利用神经网络的学习功能在传统比例积分微分(PID)控制器的基础上构建了一种自适应PID控制器,用于磁悬浮球控制系统.实验结果表明,控制器结构简单,易于工程实现,可以实现磁悬浮球的稳定悬浮,并且系统具有快速响应性和良好的抗干扰性.
【总页数】3页(P22-24)
【作者】许杰;刘春生
【作者单位】南京航空航天大学,自动化学院,江苏,南京,210016;南京航空航天大学,自动化学院,江苏,南京,210016
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.基于自适应神经网络滑模控制的常压潜水装具航向控制器设计 [J], 陈垦;刘涛;杜新光;林强;刘双
2.基于正交神经网络的动力定位自适应控制器设计 [J], 徐海祥;卢林枫;余文曌;韩鑫;朱梦飞
3.基于神经网络自适应算法的机械手控制器的\r设计与仿真 [J], 李斌;马小瑞
4.基于RBF神经网络的参数自适应PID变桨控制器的设计 [J], 张真源;刘国荣;杨小亮;刘科正;邓争
5.基于自适应神经网络观测器的气垫船非线性系统的非奇异超扭曲终端滑模控制器设计 [J], Hamede Karami;Reza Ghasemi
因版权原因,仅展示原文概要,查看原文内容请购买。
混合磁悬浮球系统变参数PID控制仿真
上官霞南;江东;顾玉武;杨嘉祥
【期刊名称】《哈尔滨理工大学学报》
【年(卷),期】2007(012)002
【摘要】根据奇异摄动法,建立了混合磁悬浮系统非线性动态数学模型,并根据控制器参数的整定原则,提出了混合磁悬浮球的一种变参数PID控制方案.在MATLAB 的Simulink环境下用SFunction编写参数变化规则模块,所进行的动态仿真结果表明,变参数PID控制器无论在上升时间、超调量,还是调节时间上都明显优于传统的PID控制器.
【总页数】4页(P31-34)
【作者】上官霞南;江东;顾玉武;杨嘉祥
【作者单位】哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040;哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040;哈尔滨理工大学,工程训练中心,黑龙江,哈尔滨,150080;哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040
【正文语种】中文
【中图分类】TP273
【相关文献】
1.AMB系统变参数PID控制仿真 [J], 谈浩楠;姜大军;张建生
2.磁悬浮轴承的变参数PID控制 [J], 苏义鑫;王娟;胡业发
3.基于C8051的一维磁悬浮系统变参数PID控制 [J], 李丽
4.可控永磁悬浮系统的专家PID控制仿真 [J], 刘同娟;马向国;金能强
5.基于改进专家PID和预整定Smith预估控制器的磁悬浮球系统的网络控制仿真[J], 唐会娟;谢佩章
因版权原因,仅展示原文概要,查看原文内容请购买。
绕飞弱引力小天体的轨道保持控制
崔祜涛;史雪岩;崔平远;李傲霜
【期刊名称】《高技术通讯》
【年(卷),期】2002(012)003
【摘要】建立了微小探测器绕飞弱引力小天体的轨道动力学方程,对绕飞轨道的稳定性进行了分析,给出了稳定绕飞轨道的条件,进而提出了一种摄动情况下保持绕飞轨道的控制策略,用以以便保证在主动控制下的绕飞轨道鲁棒稳定.仿真结果表明,提出的控制策略可以使探测器在有界的摄动情况下,由任意的初始状态出发,到达并保持稳定的绕飞小天体轨道.
【总页数】4页(P54-57)
【作者】崔祜涛;史雪岩;崔平远;李傲霜
【作者单位】哈尔滨工业大学137#,哈尔滨,150001;哈尔滨工业大学137#,哈尔滨,150001;哈尔滨工业大学137#,哈尔滨,150001;哈尔滨工业大学137#,哈尔滨,150001
【正文语种】中文
【中图分类】V4
【相关文献】
1.绕飞轨道(绕飞角>360°)动力学和控制策略--微小卫星一种新的应用概念 [J], 林来兴
2.有限推力下的航天器绕飞轨道保持与控制 [J], 师鹏;李保军;赵育善
3.一种小天体绕飞轨道及目标天体参数确定方法 [J], 王卫东;张泽旭;朱圣英;崔平远
4.椭圆轨道上目标监测绕飞轨道构型设计与构型保持 [J], 常燕;陈韵;鲜勇;张大巧;高晶
5.不规则小天体引力场内的广义甩摆轨道 [J], 曾祥远;李俊峰;刘向东
因版权原因,仅展示原文概要,查看原文内容请购买。
研究生自动控制专业实验地点:A区主楼518房间姓名:史帅刚实验日期:2015 年 3 月28 日斑号:14S0421 学号:14S104009 机组编号:同组人:张海东朱宁高依然李俊伟成绩教师签字:磁悬浮小球系统实验报告主编:钱玉恒,杨亚非哈工大航天学院控制科学实验室磁悬浮小球控制系统实验报告一、实验内容1、熟悉磁悬浮球控制系统的结构和原理;2、了解磁悬浮物理模型建模与控制器设计;3、掌握根轨迹控制实验设计与仿真;4、掌握频率响应控制实验与仿真;5、掌握PID控制器设计实验与仿真;6、实验PID控制器的实物系统调试;二、实验设备1、磁悬浮球控制系统一套磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。
在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。
2、磁悬浮球控制系统计算机部分磁悬浮球控制系统计算机部分主要有计算机、1711控制卡等;三、实验步骤1、系统实验的线路连接磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。
2、启动实验装置通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。
3、系统实验的参数调试根据仿真的数据及控制规则进行参数调试(根轨迹、频率、PID 等),直到获得较理想参数为止。
四、实验要求1、学生上机前要求学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试。
学生必须交实验报告后才能上机调试。
2、学生上机要求上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定。
五、系统建模思考题1、系统模型线性化处理是否合理,写出推理过程? 解:小球电磁的吸引力:20f2AN K i F(i,x )()4xμ=-(1)记:20fAN K K 4μ=-,则2xiK x i F )(),(=(2)对)x ,i (F 泰勒展开:)x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= (3)其中,00020i 00i i x x 2Ki x F(i,x)F(i ,x )i δδ====|,,002030x 00i i x x 2Ki x F(i,x)F (i ,x )x δδ===-=|, 由小球的动力学方程:22d x(t)m F(i,x )mg dt =+(4)其中,00F i x mg 0+=(,),所以可得下面式子2200000000223002Ki 2Ki d xm (i ,x )(i-i )(i ,x )(x-x )=i x dt x x i x F F =+-(5) 根据拉普拉斯变换,)()()(s x mx 2Ki s i mx 2Ki s s x 322002-= (6)将)2020x iK(mg -=带入并变换可得,200x(s)-1=i(s)a s -b (7)其中00000i i a =, b =2gx以传感器处理电路输出电压为out U (s),以功放控制电压为in U (s),out s s a 2in a 00U (s)K x(s)-(K /K )G(s)===U (s)K i(s)a s -b(8)取系统状态变量分别为1out 2out x =u ,x =u ,则•11in s •2200a 0 1 0xx =+u 2g 2g?K 0-x x x i ?K ⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪⎝⎭⎝⎭⎝⎭ (9)将实际参数带入可得,in 2121U 124990x x 0098010x x ⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫⎝⎛∙∙..(9)另外,传函为:5250300.0311s 77.8421s G 20.)(-=(10)六、根轨迹试验思考题1、根据系统模型,采用根轨迹法设计一个控制器?分别比较超前校正和迟后超前校正的特点,用仿真结果进行说明。
解:系统的传函为:5250300.0311s 77.8421s G 20.)(-=若校正后指标为:0.2(2%),10%,0.02s p ss t s e σ=≤=100%4p s nt σζω=⨯=由此解得,0.6,33.83n ζω== 希望闭环主导极点为:2027A j =-±(1)超前校正:1111c c c s K s G K Ts s Tττα++==++注:超前校正能改善系统动态性能,但是不能达到稳态误差的指标要求。
○1取115T-=-(2027)[(202715)(202731.3) (202731.3)]180j x j j j ︒∠-+--∠-+++∠-+++∠-+-=-(11)解上式,得12.2x =,根轨迹如下:Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)-200-150-100-50050100150200图1此时,有一条根轨迹一直在右半平面,即系统有一个不稳定的极点。
显然,这是不满足要求的。
○2取125T-=-,带入(11)式,解得 5.2x =-,校正后的系统传函:020.5993( 5.2)77.8421G (s)(25)0.0311s 30.5250s s +=+-其根轨迹如下(图2):分析:当根轨迹位于2027A j =-±处时,根轨迹系数1500k =,此时还有第三个极点15.1,由于它大于零,所以系统会不稳定的,这个方案也不行。
Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)图2○3取145T -=-,带入(11)式,解得21.56x =-,校正后的系统传函:020.9229(21.56)77.8421G (s)(45)0.0311s 30.5250s s +=+-根轨迹如下(图3):分析:当根轨迹位于2027A j =-±处时,根轨迹系数2310k =(系统开环增益 1.123K =),此时第三个极点为-6.16,稳定。
下面对这一校正方案进行simulink 仿真。
Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)-50-40-30-20-10010203040图3Simulink 仿真框图如下(图4)图4仿真输出:图5图6注:图5是系统输出,图6是系统偏差信号(本例中也是误差信号)(2)迟后校正迟后校正在超前校正的基础上进行,目的是变动系统开环增益K 。
为了不引起希望闭环极点的变化,这里取1cK α=,即: 111111c c c s s K s G K Ts s s T Tτττα+++===+++(12) 由于超前校正之后,系统开环增益 1.123K =,欲使系统稳态误差0.02ss e =,则迟后校正中15044.5241 1.123c T K Tτατ=====校正后传函为:0210.9229(21.56)77.8421G (s)1(45)0.0311s 30.5250s s s s T τ++=+-+○1取12τ=,求得10.0449T=。
根轨迹,simulink 仿真如图:Real Axis (seconds-1)I m a g i n a r y A x i s (s e c o n d s -1)分析:迟后校正后,系统的稳态误差达到了要求,但是动态性能却受到很大的影响:极点:19.726.5A j =-±和 2.76 3.84A j =-±;超调450%,调整时间2秒。
这种影响是由于迟后校正引入的开环偶极子造成的,下面为减少影响,将开环偶极子向原点附近靠拢。
○2取18τ=,求得10.18T=。
根轨迹,simulink 仿真如图:Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)从根轨迹图中可知,极点为:21.816.4A j =-±(阻尼系数0.8,超调不足2%,调整时间0.19,但它已经不是希望主导极点2027A j =-±了)和12.123.4A j =-±(阻尼系数0.05,超调85%,调整时间0.33)。
从simulink 仿真图中可知,超调300%,这显然比两组极点的任何一组都大;调整时间7秒(5%),这也比两组极点的任何一组都大。
此图说明,系统中已经没有主导极点了,是两组根共同作用的结果。
○3取10.5τ=,求得10.0112T=。
根轨迹,simulink 仿真如图:-50-40-30-20-10010203040Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)极点:2027A j =-±和 2.76 3.84A j =-±;超调450%,调整时间2秒。
综述:3组校正中,第一组的效果最好。
1.根轨迹超前校正,从功能上看,超前校正可以改善动态性能(提高阻尼比——降低超调;调整极点与虚轴的距离——降低调整时间);从效果上看,基本达到了要求。
但是,超前校正后,如果仅考虑主导极点,理论上是一个欠阻尼,而实际情况是一个过阻尼,这是由于另外一个极点的影响。
所以,实际系统中,最终的效果是所有极点效果的综合,会是什么样的响应,只根据各个极点数值的大小很难做出判断(或许这需要经验)。
2.根轨迹超前-迟后校正,从功能上看,超前-迟后校正既可以改善动态性能(超前),又可以改善稳态误差(迟后)。
从结果上看,稳态误差完全可以达到理论值,但是动态性能却达不到。
原因是,迟后校正引入了一对开环偶极子,这使得系统多了一对位于原点附近的闭环极点,最终的响应,是由它们和希望主导极点共同影响的。
另,若在超前校正前,对希望主导极点留有一定的裕量,效果如下: ○12527A j =-±(满足参数的临界主导极点是:2027A j =-±)Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)-50-40-30-20-10010203040极点:24.725.6A j =-±和极点: 2.17.31A j =±; 动态性能:超调260%,调整时间2秒(5%)。