平面连杆机构——四连杆机构的类型
- 格式:ppt
- 大小:151.00 KB
- 文档页数:6
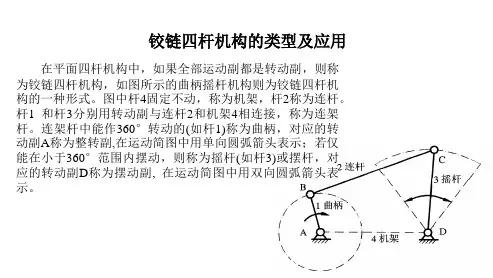
平面四杆机构是一种常见的机械结构,由四个连杆组成,可以实现转动和传递力量。
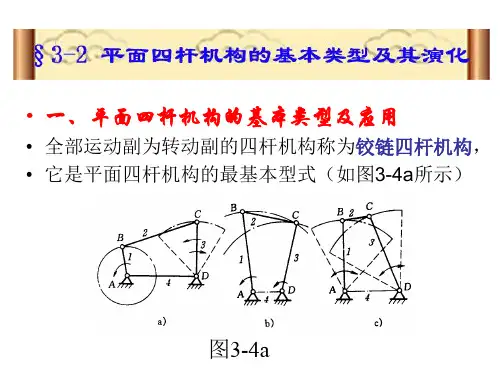
根据其连杆排列方式和运动特点,平面四杆机构可以分为以下几种基本类型:
四杆平行机构:四个连杆平行排列的机构,常见的形式是平行四边形。
四杆平行机构具有简单结构和稳定性好的特点,在工程和机械设计中广泛应用。
四杆平行滑块机构:四个连杆中有一个是滑块,可以在平面内作直线运动。
这种机构常见的应用是在平面上实现直线运动,如印刷机的工作台。
四杆旋转机构:四个连杆可以围绕一个固定点旋转,形成一个封闭的轨迹。
这种机构常见的形式是摇杆机构或曲柄摇杆机构,常用于发动机的活塞运动转化为旋转运动。
四杆转动滑块机构:四个连杆中有一个是滑块,可以在平面内作转动运动。
这种机构常见的应用是实现旋转运动和直线运动的转换,如某些机床的进给机构。
这些基本类型的平面四杆机构都具有不同的运动特点和应用场景。
根据具体的工程需求和设计要求,可以选择合适的平面四杆机构类型,并进行优化和改进,以满足特定的运动和力学要求。


平面四杆机构的三种基本类型判断标准(一)平面四杆机构的三种基本类型判断标准引言平面四杆机构是一种常见的机械结构,广泛应用于机械工程领域。
它由四个连杆组成,能够实现不同的运动,并具有一定的机械优势。
本文将介绍平面四杆机构的三种基本类型判断标准,帮助读者更好地理解和应用这一机械结构。
1. 条件1:连杆数目平面四杆机构的第一个判断条件是连杆数目。
根据连杆数量的不同,平面四杆机构可以分为以下三种基本类型:•4杆1驱动:由一个驱动连杆和三个被动连杆组成,驱动连杆通过轴承或摩擦连接到驱动装置上。
这种类型的机构常用于基本的传动和夹持功能。
•3杆1驱动:由一个驱动连杆和两个被动连杆组成,驱动连杆通过轴承或摩擦连接到驱动装置上。
这种类型的机构在工程领域应用广泛,能够实现特定的运动轨迹和力学优势。
•2杆2驱动:由两个驱动连杆和两个被动连杆组成,每个驱动连杆都通过轴承或摩擦连接到驱动装置上。
这种类型的机构可实现复杂的运动,例如平移和旋转的组合。
2. 条件2:连杆长度比较平面四杆机构的第二个判断条件是连杆长度的比较。
通过比较不同连杆的长度,可以判断机构是否为平面四杆机构。
这里有两种情况:•互为相反数:连杆的长度之比为-1。
若连杆的长度满足这个条件,则可以判断该机构为平面四杆机构。
•乘积为1:连杆的长度之比为1。
若连杆的长度满足这个条件,则可以判断该机构为平面四杆机构。
3. 条件3:杆件连接方式平面四杆机构的第三个判断条件是杆件连接方式。
根据连杆连接方式的不同,可以判断机构是否为平面四杆机构。
这里有两种情况:•直接连接:连杆之间直接连接,形成闭合的杆件结构。
这种连接方式常见于平面四杆机构中。
•间接连接:连杆之间通过其他杆件或连接件连接。
如果连杆之间具有间接连接的情况,则不能判断该机构为平面四杆机构。
结论在判断平面四杆机构的类型时,我们可以从连杆数目、连杆长度比较和杆件连接方式三个方面入手。
通过对这三个判断标准的分析,可以准确判断出平面四杆机构的类型。
平面四杆机构的类型,特点及应用概念平面四杆机构是一种重要的机械构件,具有固定点簇、连杆及活动点簇等关键组成部分。
根据不同的连接方式和功能需求,平面四杆机构可以分为平行四杆机构、菱形四杆机构、双曲线四杆机构、半圆四杆机构等多种类型。
下面本文将对这些机构类型的特点及应用进行相关介绍。
一、平行四杆机构平面四杆机构中的平行四杆机构,最为常见。
平行四杆机构由两对等长连杆组成,各自平行滑动,所以叫做平行四杆机构。
平行四杆机构的特点是连接点严格固定,适合转动相同方向的连续运动,如车床上的顶轴和平面磨床的进给机构就采用了平行四杆机构。
二、菱形四杆机构菱形四杆机构是由一对等长的对边固定的菱形和一对等长杆件组成的机构。
其中,两个杆件与菱形的对角线相连,另外两个杆件则与菱形两条平行线相连。
通过这样的联结方式,菱形四杆机构可以实现不同方向的运动,如旋钮开关,废乳机械的减速机构等都采用了菱形四杆机构。
三、双曲线四杆机构双曲线四杆机构是由双曲面、两个相交的固定点、两个关节和两个等长杆组成的平面四杆机构,主要是用来实现一定的负载传递和动力,例如工件阻力和重力等。
双曲线四杆机构的优点在于具有一定的自适应能力,可以自动调整杆长度,达到更稳定的运动效果。
应用领域包括夹持,钻床等。
四、半圆四杆机构半圆四杆机构是由两条半圆弧及两对连杆构成的平面四杆机构。
通过调整连接点的位置及杆长度,可以实现转轴轨迹的变化。
半圆四杆机构在工业生产中被广泛应用,如水平挖掘机,转子泵等。
在应用平面四杆机构的过程中,大多数机构的运动往往还需要与其它机构进行配合才能实现更复杂多变的功能。
此外在机器人领域中,四杆机构也得到了广泛应用,如各类机器人的手臂,就是利用四杆机构的特性来完成精细灵活的动作。
总的来说,平面四杆机构是机械领域中一类非常基础且重要的构件。
通过不同的连接方式和调整,可以实现多样化的运动功能,并被广泛应用在工业生产及机器人领域中。
平面连杆机构的基本形式
平面连杆机构是一种常见的机械结构,由多个连杆和固定点组成,用
于将旋转运动转换为直线运动或者将直线运动转换为旋转运动。
平面
连杆机构的基本形式包括四种:曲柄摇杆机构、双曲柄摇杆机构、滑
块机构和凸轮机构。
曲柄摇杆机构是最简单的平面连杆机构之一。
它由一个固定点、两个
连杆和一个曲柄组成。
其中,一个连杆连接着曲柄和固定点,另一个
连杆连接着固定点和工作部件。
当曲柄旋转时,工作部件就会做往复
直线运动。
这种结构广泛应用于内燃机等设备中。
双曲柄摇杆机构则是由两个相交的连接臂组成的平面连杆机构。
它可
以将圆周运动转换为直线运动,并且能够实现不同幅值和相位的输出。
这种结构常用于制造振荡器等设备。
滑块机构由一条滑块、两个连接臂和一个固定点组成。
当滑块沿着一
条直线移动时,连接臂也会沿着另一条直线做相应的运动。
这种结构
广泛应用于起重机、升降机等设备中。
凸轮机构则是由一个凸轮和一个连接臂组成的平面连杆机构。
当凸轮
旋转时,连接臂会做往复直线运动。
这种结构常用于制造发动机、液
压泵等设备。
总之,平面连杆机构是一种非常重要的机械结构,广泛应用于各种设备中。
了解其基本形式对于设计和制造具有重要意义。