第三章--平面连杆机构及其设计.
- 格式:ppt
- 大小:2.13 MB
- 文档页数:57
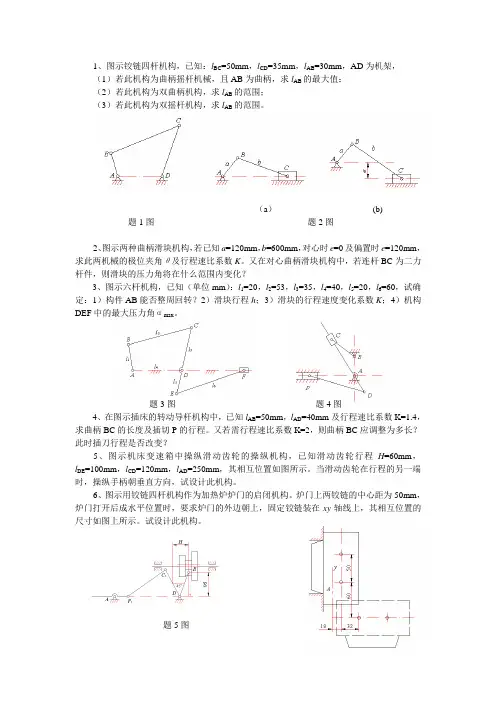
1、图示铰链四杆机构,已知:l BC=50mm,l CD=35mm,l AB=30mm,AD为机架,(1)若此机构为曲柄摇杆机械,且AB为曲柄,求l AB的最大值:(2)若此机构为双曲柄机构,求l AB的范围;(3)若此机构为双摇杆机构,求l AB的范围。
(a)(b)题1图题2图2、图示两种曲柄滑块机构,若已知a=120mm,b=600mm,对心时e=0及偏置时e=120mm,求此两机械的极位夹角θ及行程速比系数K。
又在对心曲柄滑块机构中,若连杆BC为二力杆件,则滑块的压力角将在什么范围内变化?3、图示六杆机构,已知(单位mm):l1=20,l2=53,l3=35,l4=40,l5=20,l6=60,试确定:1)构件AB能否整周回转?2)滑块行程h;3)滑块的行程速度变化系数K;4)机构DEF中的最大压力角αmax。
题3图题4图4、在图示插床的转动导杆机构中,已知l AB=50mm,l AD=40mm及行程速比系数K=1.4,求曲柄BC的长度及插切P的行程。
又若需行程速比系数K=2,则曲柄BC应调整为多长?此时插刀行程是否改变?5、图示机床变速箱中操纵滑动齿轮的操纵机构,已知滑动齿轮行程H=60mm,l DE=100mm,l CD=120mm,l AD=250mm,其相互位置如图所示。
当滑动齿轮在行程的另一端时,操纵手柄朝垂直方向,试设计此机构。
6、图示用铰链四杆机构作为加热炉炉门的启闭机构。
炉门上两铰链的中心距为50mm,炉门打开后成水平位置时,要求炉门的外边朝上,固定铰链装在xy轴线上,其相互位置的尺寸如图上所示。
试设计此机构。
题5图题6图题7图7、设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K=1.5,滑块的冲程l C1C2=50mm,导路的偏距e=20mm,求曲柄长度l AB和连杆长度l BC。
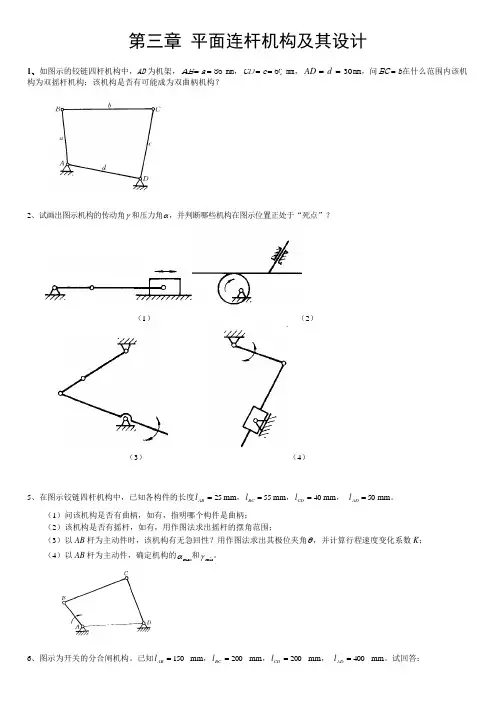
第三章 平面连杆机构及其设计1、如图示的铰链四杆机构中,AD 为机架,AB a ==35 mm ,CD c ==50 mm ,30==d AD mm ,问BC b =在什么范围内该机构为双摇杆机构;该机构是否有可能成为双曲柄机构?2、试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”?(1) (2)(3) (4)5、在图示铰链四杆机构中,已知各构件的长度25=AB l mm ,55=BC l mm ,40=CD l mm , 50=AD l mm 。
(1)问该机构是否有曲柄,如有,指明哪个构件是曲柄;(2)该机构是否有摇杆,如有,用作图法求出摇杆的摆角范围;(3)以AB 杆为主动件时,该机构有无急回性?用作图法求出其极位夹角θ,并计算行程速度变化系数K ; (4)以AB 杆为主动件,确定机构的αmax 和γmin 。
6、图示为开关的分合闸机构。
已知150=AB l mm ,200=BC l mm ,200=CD l mm , 400=AD l mm 。
试回答:(1)该机构属于何种类型的机构;(2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ;(3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么?7、试设计一曲柄摇杆机构。
设摇杆两极限位置分别为4090,15021===CD l ; ϕϕmm ,50=AD l mm 。
求AB l 、BC l 及行程速比系数K 和最小传动角γmin 。
(用图解法求解用图解法求解,简述作图步骤,并保留作图过程)8、现需设计一铰链四杆机构,已知摇杆CD 的长度l CD =150mm ,摇杆的两极限位置与机架AD 所成的角度 903021==ϕϕ,,机 构的行程速比系数K =1,试确定曲柄AB 和连杆BC 的长度。
10、设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K =1.5,滑块的行程10021=C C l mm ,导路的偏距20=e mm 。
1图11所示铰链四杆机构中,已知各杆长度AB l =42mm ,BC l =78mm ,CD l =75mm ,AD l =108mm 。
要求(1) 试确定该机构为何种机构;(2) 若以构件AB 为原动件,试用作图法求出摇杆CD 的最大摆角ϕ, 此机构的极位夹角θ,并确定行程速比系数K(3) 若以构件AB 为原动件,试用作图法求出该机构的最小传动角min γ;(4) 试分析此机构有无死点位置。
图11【分析】(1)是一道根据机构中给定的各杆长度(或尺寸范围)来确定属于何种铰链四杆机构问题;(2)(3)(4)是根据机构中给定的各杆长度判定机构有无急回特性和死点位置,确定行程速比系数K 和最小传动角问题。
解: (1)由已知条件知最短杆为AB 连架杆,最长杆为AD 杆,因mm l l mm l l CD BC AD AB 153757815010842=+=+<=+=+故AB 杆为曲柄,此机构为曲柄摇杆机构。
(2)当原动件曲柄AB 与连杆BC 两次共线时,摇杆CD 处于两极限位置。
适当选取长度比例尺l μ,作出摇杆CD 处于两极限位置时的机构位置图AB 1C 1D 和AB 2C 2D ,由图中量得ϕ=70°,θ=16°,可求得19.1180180≈+︒-︒=K θθ(3) 当原动件曲柄AB 与机架AD 两次共线时,是最小传动角min γ可能出现的位置。
用作图法作出机构的这两个位置AB ′C′D 和AB ″C ″D ,由图中量得,50,27︒=''︒='γγ故 min γ=︒='27γ(4) 若以曲柄AB 为原动件,机构不存在连杆BC 与从动件CD 共线的两个位置,即不存在︒='0γ的位置,故机构无死点位置;若以摇杆CD 为原动件,机构存在连杆BC 与从动件AB 共线的两个位置,即存在︒='0γ的位置,故机构存在两个死点位置。
【评注】 四杆机构基本知识方面的几个概念(如有曲柄条件、急回运动、传动角等)必须清晰。
第三章连杆机构设计和分析本章重点:平面四杆机构设计的几何法、解析法,及平面连杆机构运动分析的几何方法、解析法,机构动态静力分析的特点本章难点:1. 绘制速度多边形和加速度多边形时,不仅要和机构简图中的位置多边形相似,而且字母顺序也必须一致。
2.相对速度和加速度的方向,及角速度和角加速度的转向。
3.用解析法对平面机构进行运动分析,随着计算机的普及,已越来越显得重要,并且将在运动分析中取代图解法而占主要地位。
其中难点在于用什么样的教学工具来建立位移方程,并解此方程。
因为位移方程往往是非线性方程。
基本要求:了解平面连杆机构的基本型式及其演化;对平面四杆机构的一些基本知识(包括曲柄存在的条件、急回运动及行程速比系数、传动角及死点、运动的连续性等)有明确的概念;能按已知连杆三位置、两连架杆三对应位置、行程速比系数等要求设计平面四杆机构。
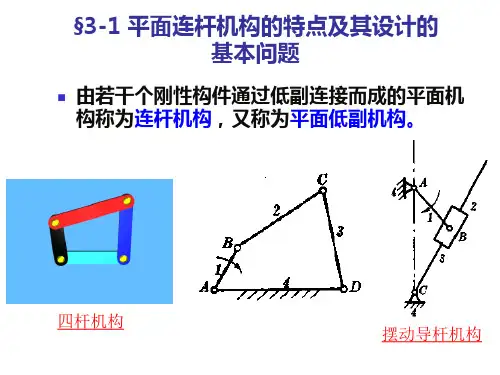
§3-1 平面四杆机构的特点和基本形式一、平面连杆机构的特点能够实现多种运动轨迹曲线和运动规律,低副不易磨损而又易于加工。
由本身几何形状保持接触。
因此广泛应用于各种机械及仪表中。
不足之处:作变速运动的构件惯性力及惯性力矩难以完全平衡;较难准确实现任意预期的运动规律,设计方法较复杂。
连杆机构中应用最广泛的是平面四杆机构。
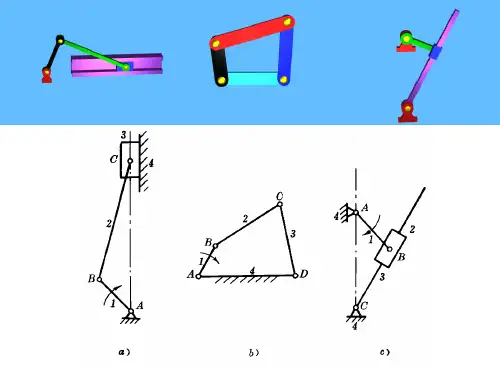
二、平面四杆机构的基本型式三种:曲柄摇杆机构双曲柄机构双摇杆机构三、平面四杆机构的演变1.转动副转化为移动副2.取不同构件为机架:3.变换构件的形态4.扩大转动副尺寸。
§3-2 平面连杆机构设计中的一些共性一、平面四杆机构有曲柄的条件上一节中,已经讲过平面四铰链机构中有三种基本形式:曲柄摇杆机构(一个曲柄);双曲柄机构(二个曲柄);双摇杆机构(没有曲柄)。
可见有没有曲柄,有几个曲柄是基本形式的主要特征。
因此,曲柄存在条件在杆机构中具有十分重要的地位。
下面分析曲柄存在条件:在铰链四杆机构中,有四个转动副和四个杆,为什么连架杆能作整周旋转(曲柄),有时就不能作整周旋转(摇杆)呢?这主要是因为四杆的相对杆长能约束连架杆是否能整周旋转或只作摆动的缘故。
第章平面连杆机构及其设计1. 介绍平面连杆机构是机械运动学中一类常见的重要机构,由连杆(也称杆件)组成,分为接触连杆机构和非接触连杆机构两类。
平面连杆机构能够将旋转运动转化为直线运动,或将直线运动转化为旋转运动,并广泛应用于各种机械装置中。
2. 平面连杆机构的分类平面连杆机构一般分为以下几类:2.1 四杆机构四杆机构是由四根杆件组成的平面连杆机构,其中两根杆件为引导杆,在机构运动过程中仅仅进行直线运动,另外两根杆件则为连杆,在机构运动过程中发生旋转和直线运动。
2.2 三杆机构三杆机构又称三杆架,是由三根杆件组成的平面连杆机构,其中两根杆件为引导杆,在机构运动过程中仅仅进行直线运动,另外一根杆件则为连杆,在机构运动过程中发生旋转和直线运动。
2.3 双曲杆机构双曲杆机构是由两个连杆组成的平面连杆机构,其中两个连杆的运动轨迹呈现为双曲线形状,能够实现近似于直线的直线运动。
2.4 齿条机构齿条机构是由齿轮和齿条组成的平面连杆机构,齿轮进行旋转运动,齿条进行直线运动,能够实现运动传递和位置定位。
3. 平面连杆机构的设计设计平面连杆机构时需要考虑以下几方面:3.1 运动要求平面连杆机构的设计需要优先考虑机构所要完成的工作,确定所需运动方式、速度、角度等指标,为机构的设计提供技术参考和方向。
3.2 相关构件尺寸在完成运动要求的基础上,需考虑各组件之间的相互匹配,包括连杆长度、引导杆长度、连杆夹角、引导杆倾斜角等。
3.3 材质选取平面连杆机构在耐用性、强度、重量、成本等方面也需要考虑,选用合适的材质,满足机构设计要求。
3.4 连接方式选择平面连杆机构的连接方式通常为销轴连接和螺栓连接,选择合适的连接方式也是机构设计的关键。
4.平面连杆机构是机械装置中常见的一种机构结构,应用广泛,设计时需考虑机构所要完成的工作、构件尺寸、材质选取和连接方式选择等方面,结合实际情况进行设计,才能满足机构的运动要求和性能要求。