光电循迹小车使用手册
- 格式:doc
- 大小:715.00 KB
- 文档页数:12
智能循迹车使用说明书
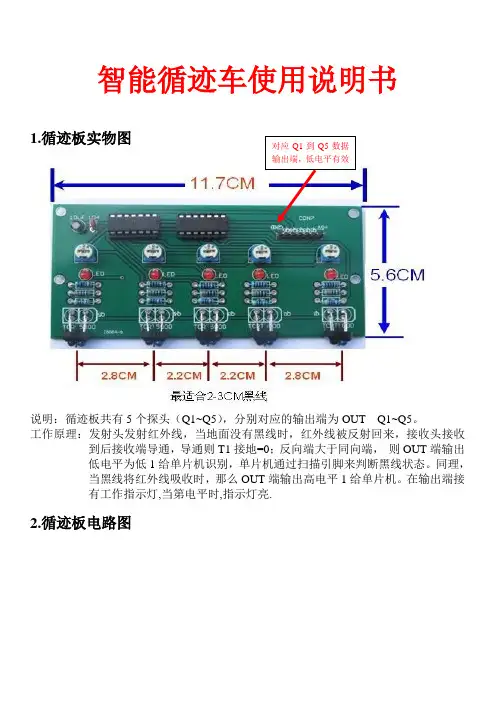
1.循迹板实物图
说明:循迹板共有5个探头(Q1~Q5),分别对应的输出端为OUT Q1~Q5。
工作原理:发射头发射红外线,当地面没有黑线时,红外线被反射回来,接收头接收
到后接收端导通,导通则T1接地=0;反向端大于同向端, 则OUT 端输出低电平为低1给单片机识别,单片机通过扫描引脚来判断黑线状态。
同理,当黑线将红外线吸收时,那么OUT 端输出高电平1给单片机。
在输出端接有工作指示灯,当第电平时,指示灯亮.
2.循迹板电路图
3.循迹探头说明书
4.循迹算法分析
T1
A . B. C.
A.一个探头检测到信号
B.侧边一个探头检测到信号
C.两个探头同时检测到信号
5.电机驱动
电机驱动结构简图
电机驱动分析:这是一个H 桥电路,当LA 点位低电平时,Q3,Q2截止,Q7,Q1导通,电机左端呈高电平;当LB 点位高电平时,Q8,Q2截止,Q6,Q5导通,电机左端呈高电平;因此,在LA 为0,LB 为1时,电动机正转,反之,电动机反转。
如果LA,LB 同为高电平或低电平时,电机停止转动。
LA
LB。
智能循迹避障小车设计说明智能循迹避障小车是一种基于微控制器控制的智能小车,它能够根据预设程序进行自主行驶、循迹和避障。
下面是对智能循迹避障小车的设计说明:1.硬件设计智能循迹避障小车的硬件设计包括以下组成部分:1.1 微控制器:使用单片机实现小车的控制和决策,采用常见的单片机有STC、ATmega、STM32等。
1.2 传感器:使用光电传感器进行循迹,超声波传感器进行避障。
在循迹方面,一般采用两个光电传感器,安装在小车底部,分别检测黑线和白色地面;在避障方面,一般采用超声波传感器,安装在小车前方,检测前方物体距离。
1.3 驱动电机:小车驱动电机一般采用直流减速电机,通过H桥驱动电路实现正反转控制。
1.4 电源:小车电源采用锂电池或干电池供电。
1.5 其他:小车还需要一些辅助元件,如LED指示灯、蜂鸣器等。
2.软件设计智能循迹避障小车的软件设计包括以下几个方面:2.1 循迹算法:根据光电传感器检测到的黑线和白色地面的信号,判断小车当前位置,控制小车朝着黑线方向运动。
2.2 避障算法:根据超声波传感器检测到的前方距离信息,判断小车前方是否有障碍物,避免碰撞。
2.3 控制逻辑:根据传感器数据计算得出的小车状态,进行控制决策。
比如,避障优先还是循迹优先,小车如何避障等。
2.4 通信协议:如果需要远程控制或传输数据,需要设计相应的通信协议。
3.功能实现基于硬件和软件设计,实现智能循迹避障小车以下功能:3.1 循迹:小车能够自主行驶,按照预设的循迹算法进行路径规划和执行。
3.2 避障:小车能够根据预设的避障算法,自主避开前方障碍物,避免碰撞。
3.3 情境感知:小车能够通过传感器感知环境,根据感知到的信息做出相应的控制决策。
3.4 远程控制:如果需要,可以通过通信模块实现小车的远程控制和数据传输。
附录程序目录一、前言------------------------------------------------------------二、小车功能------------------------------------------------------三、元器件选择--------------------------------------------------四、I/O分配及硬件连接简图---------------------------------五、相关模块、算法---------------------------------------------六、系统框图------------------------------------------------------七、调试过程------------------------------------------------------八、小车图片资料---------------------------------------------------九、讲座所感------------------------------------------------------十、实习总结------------------------------------------------------一、前言感谢生产实习能给我们这次实现自己想法的机会,虽然实验条件异常简陋、资金投入非常有限,总体感觉我的队友们灰常灰常给力啊,我感觉我是抱到大腿了--王威,夏青、峰哥,团队气氛非常好,大家一起讨论,一起分工研究模块,最后一起解决问题调试程序,而且是不同的组合在不同阶段解决了不同的问题,大家精诚合作,各显身手,在奋战中给大三学年画上了圆满的句号。
之前我们本来商量是不是可以拿往年电子设计大赛的题目过来做,如果难度太大就算只实现一部分功能也算是成功完成了,结果研究一天后发现电子设计大赛的题目需要很长时间的知识积累啊,基本上都是准备一个月以上然后开工的,后来王威提议要不我们做个小车吧,超声波测距实现自动物体追踪,控制核心采用单片机,传感器采用广泛用于避障和测距的超声波传感器,前进和后退用普通伺服电机和电机驱动模块实现。
本科毕业设计说明书题目:智能循迹小车院(部):机电工程学院专业:班级:姓名:学号:指导教师:完成日期:摘要 (2)ABSTRACT (4)1.绪论........................................................................................................................... - 1 - 1.1智能小车的作用和意义 ........................................................................................ - 1 -1.2智能小车的现状...................................................................................................... - 2 -2.方案设计与论证 ................................................................................................... - 3 - 2.1循迹模块 ................................................................................................................... - 3 - 2.2主控系统 ................................................................................................................... - 4 - 2.3电机驱动模块 .......................................................................................................... - 5 - 2.4机械系统 ................................................................................................................... - 7 -2.5电源系统 ................................................................................................................... - 7 -3.硬件设计................................................................................................................... - 8 - 3.1信号检测模块 .......................................................................................................... - 8 - 3.2主控电路 ................................................................................................................... - 8 - 3.3驱动电路 ................................................................................................................. - 11 -3.4总体设计 ................................................................................................................. - 11 -4.软件设计................................................................................................................. - 13 - 4.1总体结构框图 ........................................................................................................ - 13 - 4.2总体程序流程图.................................................................................................... - 14 - 4.3总程序...................................................................................................................... - 14 -4.4软件仿真 ................................................................................................................. - 38 -5.安装和调试............................................................................................................ - 40 - 结束语............................................................................................................................ - 42 - 致谢 .............................................................................................................................. - 43 - 参考文献 ...................................................................................................................... - 44 -本设计主要有三个模块包括信号检测模块、主控模块、电机驱动模块。
循迹小车作品说明书(总11页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--目录1 电路设计 ............................................................................................................ 错误!未定义书签。
总体方框图............................................................................................... 错误!未定义书签。
工作原理 ................................................................................................... 错误!未定义书签。
2 各主要电路及部件工作原理........................................................................ 错误!未定义书签。
三路循迹电路简要说明........................................................................ 错误!未定义书签。
电压比较电路简要说明........................................................................ 错误!未定义书签。
电机驱动电路简要说明........................................................................ 错误!未定义书签。
复位电路简要说明................................................................................. 错误!未定义书签。
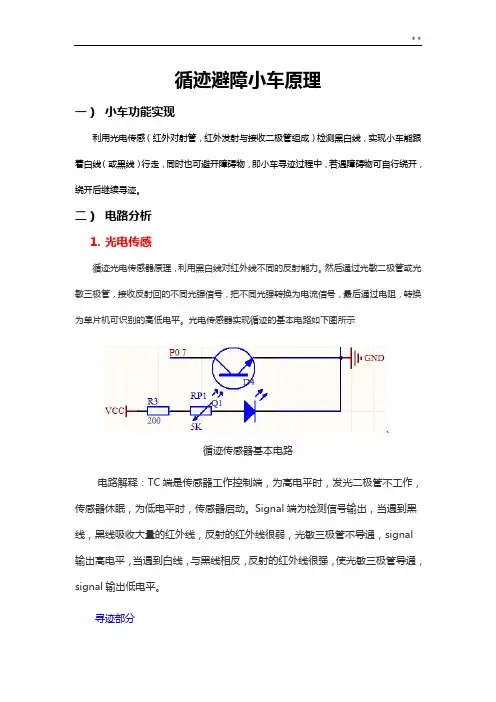
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal 输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 –5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
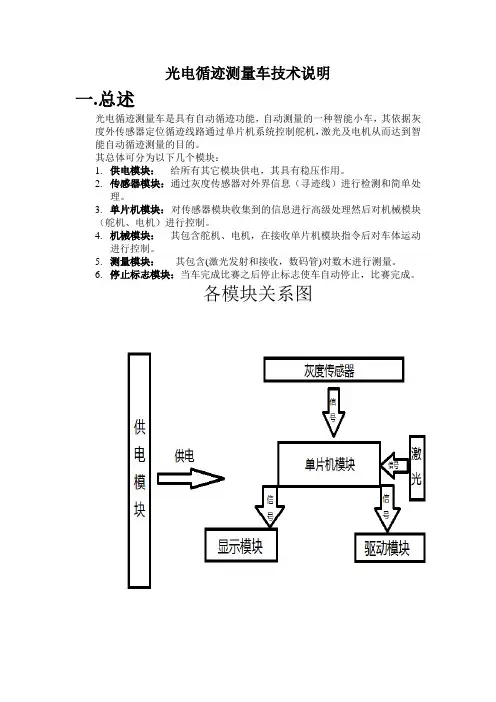
光电循迹测量车技术说明一.总述光电循迹测量车是具有自动循迹功能,自动测量的一种智能小车,其依据灰度外传感器定位循迹线路通过单片机系统控制舵机,激光及电机从而达到智能自动循迹测量的目的。
其总体可分为以下几个模块:1.供电模块:给所有其它模块供电,其具有稳压作用。
2.传感器模块:通过灰度传感器对外界信息(寻迹线)进行检测和简单处理。
3.单片机模块:对传感器模块收集到的信息进行高级处理然后对机械模块(舵机、电机)进行控制。
4.机械模块:其包含舵机、电机,在接收单片机模块指令后对车体运动进行控制。
5.测量模块:其包含(激光发射和接收,数码管)对数木进行测量。
6.停止标志模块:当车完成比赛之后停止标志使车自动停止,比赛完成。
各模块关系图二.供电模块说明:INPUT接7V~8V电源正极(电池供电),OUTPUT(输出为稳压5V)接电路中所有VCC。
三、传感器模块说明:灰度传感器是模拟传感器,灰度传感器利用光敏电阻对不同颜色的检测面根据光的反射程序不同,其阻值变化在的原理进行颜色深浅检测。
传感器信号线接0.0、0.1、0.2。
四、单片机模块说明:从P0.0接排阻至P0.7,复位开关S1,晶振12.00MHZ。
五、驱动模块说明:用L298N对直流电机进行驱动,以上是驱动原理图。
使能端ENA,ENB 接单片机的P0.3,P0.4 端口。
信号接单片机P2.2, P2.3, P2.4, P2.5端口。
六、停止标志和激光模块(1)上图为激光接收电路图,它作为停止标志使小车比赛完成时停止到终点。
(2)该图与下图共同组成激光测数模块。
说明:激光接收电路图要做三个(一个用为停止标志,另外两个用来测数)。
七.数码管管脚说明说明:此数码管为共阳数码管如图J 、E接正极,A、B、C、D、F、G、H、I依次接单片机的 P1.0、P1.1、P1.2、P1.3、P1.4、P1.5、P1.6、P1.7管脚。
八.机械分布图说明:黄色部分的电机装在车子的下面。
循迹小车说明文档姓名:赵晶班级:2011嵌本指令班学号:201101041187一、功能描述1)小车可以沿着黑线跑,转大弯、小弯、直角弯等。
2)车顶附带12864液晶显示屏,显示时间、温度、距障碍物距离等。
3)躲避障碍物。
二、线路连接P0.7--P0.2连接电机驱动器,P1.0--P1.3连接四个探测器,P1.4--P1.7连接12864液晶显示屏,P2.0连接蜂鸣器,P2.1和P2.2连接两个独立键盘P0.0连接温度传感器P3.5--P3.7连接时钟模块。
三、实验器材小车底座一个,直流减速电机两个,L298N电机驱动模块一个,18650充电锂电池2节,电池盒一个,7805稳压芯片一个,10K 电位器4个,RPR光电传感器4 个,100Ω,100K电阻若干,12864LCD显示屏一个,3mm LED小灯若干,1302时钟模块一个,ds18b20温度传感器一个,超声波测速模块一个,LM393比较器四个,103瓷片电容若干,47μf电容若干,洞洞板若干,排线若干,AT89C51芯片一张,单片机最小系统一个。
四、功能实现1、焊一个单片机最小系统,如下图。
保证单片机的正常工作,方便我们对各个引脚的使用。
最小系统板,分三部分:外部晶振电路,给单片机提供工作时钟源;外部复位电路,可以上电复位,还有当单片机在工作过程中,可以人为手动复位;单片机,单片机就是一块微处理器,用来装载程序,实现程序功能。
图1(最小系统电路图)2、组装小车底盘安装小车电机和电机驱动器,设计小车外观。
使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
(如果无须调速可将两引脚接5V,使电机工作在最高速状态,既将短接帽短接)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机M1正转。
(如果信号端IN1接低电平,IN2接高电平,电机M1反转。
)控制另一台电机是同样的方式。
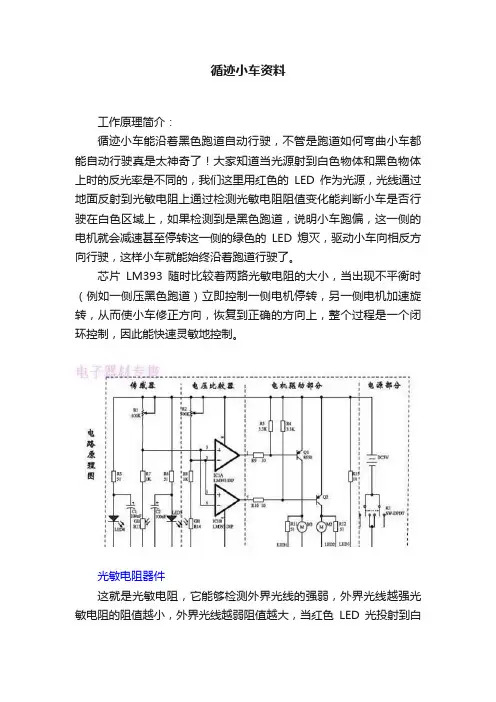
循迹小车资料工作原理简介:循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
芯片LM393随时比较着两路光敏电阻的大小,当出现不平衡时(例如一侧压黑色跑道)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向上,整个过程是一个闭环控制,因此能快速灵敏地控制。
光敏电阻器件这就是光敏电阻,它能够检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当红色LED光投射到白色区域和黑色跑道时因为反光率的不同,光敏电阻的阻值会发生明显区别,便于后续电路进行控制。
LM393比较器集成电路LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。
它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。
输出有两种状态:接近开路或者下拉接近低电平,LM393采用集电极开路输出,所以必须加上拉电阻才能输出高电平。
安装光电回路光敏电阻和发光二极管(注意极性)是反向安装在PCB上的,和地面间距约5毫米左右,光敏电阻和发光二极管之间距离也在5毫米左右。
最后可以通电测试.整车调试在电池盒内装入2节AA电池,开关按下去以后,小车正确的行驶反相是沿万向轮方向行驶,如果按住左边的光敏电阻,小车的右侧的车轮应该转动,按住右边的光敏电阻,小车的左侧的车轮应该转动,如果小车后退行驶可以同时交换两个电机的接线,如果一侧正常另一侧后退,只要交换后退一侧电机接线即可。
智能小车的循迹避障行驶目录摘要 (III)Abstract (IV)第一章绪论 (1)1.1 课题背景 (1)1.2 研究目的及意义 (1)1.3 本设计完成的工作 (2)第二章总体设计方案 (3)2.1 方案选择及论证 (4)4446662.2 最终方案 (7)第三章硬件设计 (8)3.1 主控器STC89C52 (8)3.2 单片机复位电路设计 (10)3.3 单片机时钟电路设计 (10)3.4 避障模块 (10)3.5 电源设计 (11)3.6 电机驱动模块 (12)3.7 红外循迹模块 (13)3.8 小车车体总体设计 (15)第四章软件设计 (16)4.1 主程序流程图 (16)第五章系统的安装与调试 (18)5.1 系统的安装 (18)5.2 电路的调试 (19) (20)205.3 测试结果与分析 (20)结论 (21)参考文献 (22)致谢........................................................ 错误!未定义书签。
附录1 整机电路原理图.. (22)附录2 部分源程序 (23)智能小车的循迹避障行驶摘要在现代化的生产生活中,智能机器人已经渐渐普及到国防、工业、交通、生活等各个领域。
为了使生产更加有效率更加安全,使生活更加方便、轻松,智能机器人起到了越来越重要的作用。
智能小车属于智能机器人的一种,同样能给生产生活带来极大的便利。
它能够自己判断路面情况,并将各种信息反馈给单片机。
所用到的学科有自动控制原理、传感器技术、计算机和信息技术等多门学科。
智能车能够在一定程度上解放人的双手、减小工作强度从而改善人们的生活,提高生产的质量和效率。
能够自动循迹和避绕障碍物行驶则是智能小车需要的最基本的功能。
小车之所以能够自动避开障碍物并进行循迹是因为它可以感测引导线和行进路上的障碍物,因此这里采用超声波测距模块和红外传感器来实现这些功能。
本文先介绍了选题的背景及发展前景,描述了智能车在生产和生活中发展和应用的情况;接着对硬件部分所用器件的原理和特点进行了介绍;然后对软件设计和机械部分进行说明;在文章的最后就整个过程的体会及智能机器人的发展进行了总结和展望。
智能循迹避障小车说明1.功能简介该循迹避障小车使用红外线收发二极管作为传感器,装在前方的两组红外线收发二极管探测前方是否有障碍物,装在下面的两组红外线收发二极管作为循迹使用。
LM339将四个红外线接收二极管的输出信号放大后传送给单片机STC15W201S进行处理,单片机根据这四组信号做出判断,然后控制两个直流电机的运行和停止。
4个蓝白可调电阻可以调节4组红外线收发二极管的灵敏度。
STC15W201S 是一种C51单片机,它下载程序方便,工作电压范围宽,只需要两节1.5V电池就能工作。
2.电路图3.元件清单机械零部件4.装配与调试按电路图和电路板上的标识依次将色环电阻,瓷片电容,发光二极管,集成电路插座,排针,电位器,开关,三极管,电解电容焊接在电路板上,注意IC方向,发光二极管的方向。
所有元件焊接完成后检查电路板,以免有虚焊,漏焊,短路的情况。
循迹用的两组二极管安装在二极管的下方,距离万向轮顶端5MM左右。
直流电机的接线有正反,如果在通电后发现电机转反了,只需要将电机的两根线调换后重新焊接即可。
所有安装工作完成后,将电源开关S1拨到OFF位置,S2拨到循迹位置,放入两节电池,再将S1拨到ON位置。
这时需要先调节循迹红外接收二极管的灵敏度。
调节方法以D3 D7这一组二极管为例,先将D3 D7对准黑色的轨道线,调节可调电阻R10,使右边的电机处于刚好停止的状态,然后将D3 D7对准纸张的白色区域,只要一对准白色区域,右边的电机马上就开始运转,这时这一组二极管的灵敏度就调节好了,另外一组红外线收发二极管D4 D9的调节方法相同。
把小车放到轨道上,就可以循迹了。
把开关S2拨到避障位置,调节前方两组避障二极管的灵敏度,将D6 D10 对准一个物体,调节可调电阻R19,直到刚好有一边的电机停转,然后将D6 D10 对准空旷地方,这时停止的这一边电机恢复运转,这组二极管就调节完毕了。
由于采用的是红外线避障,如果障碍物是黑色或者表面为镜面,都会影响红外线的反射,导致检测不到障碍,无法做出避障动作。
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1. 光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,sig nal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通, signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 -5厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
智能循迹避障小车的设计学院名称:机械工程学院专业班级:测控技术与仪器0902班学生姓名:李俊德刘奎宣芮指导教师姓名:孙智权2013 年03 月摘要:以STC12C5A60S2单片机为核心,由主控模板、传感器模块、电机驱动模块等组成,完成路面信息检测,寻找火源,直流电机控制等功能。
路面信息检测、循迹采用红外光电循迹传感器判断接收地面反射光线的方式反馈,通过高低电平来进行路面检测、路径判断;寻找火源采用火焰传感器判断火源所在方位;电机直流驱动则用来保证小车以最快的速度行驶。
关键字:单片机,直流电机,循迹传感器,火焰传感器目录第一章绪论 (1)第二章功能介绍 (2)2.1 主要实现功能 (2)2.2 车体设计方案 (2)2.3 障碍物探测器选择方案 (2)2.4 电源电路设计方案 (3)2.5 报警功能的设计方案 (3)第三章硬件设计 (4)3.1 硬件方案论证 (4)3.2 方案的总体设计框图 (4)3.3 硬件模块组成 (4)3.3.1 中央处理器模块 (4)3.3.2 传感器模块 (5)第四章软件设计 (8)4.1 程序流程图 (8)4.2 程序设计 (8)第五章总结 (12)5.1 李俊德总结 (12)5.2 刘奎总结 (13)5.3 宣芮总结 (14)参考文献 (15)第一章绪论智能作为现代社会的新产物是以后的发展方向。
它可以按照预先设定的模块在一个特定的环境里自动的运作,无需人为管理,便可以完成预期索要达到的或更高的目标。
本次设计的智能小车,能够沿着一定轨迹行驶并能准确寻找火源,并实现灭火功能。
在此过程中要通过单片机和各种传感器实现小车的前进、转弯等基本操作。
通过这些基本功能再加上相关的传感器实现具有特定功能的智能小车。
在理在轮式小车上加装碰撞、火焰传感器,在STC12C5A60S2单片机的管理和相关程序的控制下,能完成自动循迹及复杂地形的迷宫中寻找出路的功能。
作品可以作为高级智能玩具,也可以作为大学生学习嵌入式控制的强有力的应用实例,该系统将会有更广阔的开发前景。