第二章机器人的结构
- 格式:ppt
- 大小:2.08 MB
- 文档页数:53
机器人实验报告总结
第一章:引言
机器人技术作为人工智能领域的核心之一,一直以来备受瞩目。
近年来,随着技术的不断进步,机器人在工业、医疗、家庭等领域的应用已经成为了不可或缺的存在。
本实验旨在通过对机器人的研究和探究,进一步了解机器人的构成、运作原理和应用场景。
第二章:机器人的构成
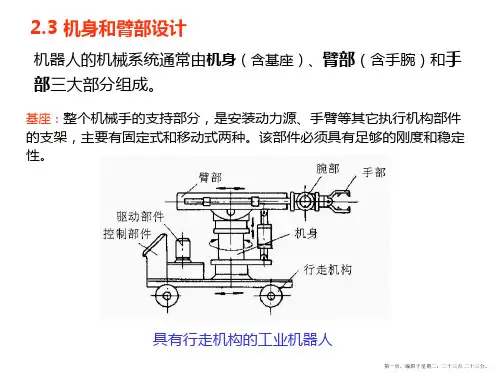
机器人的构成主要分为四个部分:机械部分、电子部分、传感器和控制单元。
其中机械部分包括机器人的外形和内部机械结构,包括机械臂、轮子、关节等;电子部分指机器人的电子设备,包括电路板、电机、传感器等;传感器是机器人的感知系统,包括视觉传感器、声音传感器、触觉传感器等;控制单元是机器人的大脑,它能够根据传感器所接收到的信息,对机器人的行为进行控制。
第三章:机器人的运作原理
机器人的运作原理主要分为两个部分:感知和决策。
感知是指机器人通过传感器接收外界环境的信息,包括视觉、声音、触觉等;而决策则是指机器人根据传感器接收到的信息,通过控制单元进行判断和决策,从而控制机器人的行动。
第四章:机器人在工业、医疗、家庭等领域的应用
机器人在工业、医疗、家庭等领域的应用广泛。
在工业领域,机器人可以代替人
工完成一些重复性劳动,提高生产效率;在医疗领域,机器人可以实现手术自动化、康复治疗等功能,提高治疗效果;在家庭领域,机器人可以帮助人们打扫卫生、照顾老人、保卫家庭等。
第五章:结论
通过本次实验,我们深入了解了机器人的构成、运作原理和应用场景。
机器人技术的发展将极大地推进社会的进步与发展。
未来,随着机器人技术的不断发展,机器人将在更多领域发挥出更大的作用。
第二章工业机器人的机械结构和运动控制章节目录2.1 工业机器人的系统组成2。
1。
1 操作机2。
1.2控制器2.1.3示教器2.2工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习2.3 工业机器人的运动控制2.3.1 机器人运动学问题2.3.2机器人的点位运动…2。
3.3机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成及各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
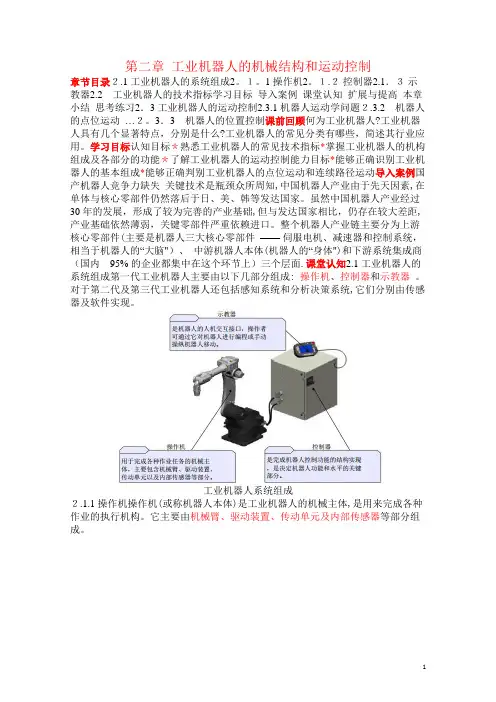
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑")、中游机器人本体(机器人的“身体")和下游系统集成商(国内95% 的企业都集中在这个环节上)三个层面.课堂认知2.1 工业机器人的系统组成第一代工业机器人主要由以下几部分组成: 操作机、控制器和示教器。
对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
工业机器人系统组成2.1.1 操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元及内部传感器等部分组成。
关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等.(1) 机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
机器人技术手册第一章:机器人概述机器人技术是现代科学技术的重要组成部分,它涉及多个学科领域的知识和技能,包括机械工程、电子工程、计算机科学等。
机器人是一种能够自动执行指定任务的智能设备,能够模仿人类的动作和行为,具有感知、决策和执行的能力。
1.1 机器人的定义和分类机器人是指由机械结构、电子装置和计算机系统组合而成,能够自主执行任务的智能设备。
根据应用领域和功能特点的不同,机器人可以分为工业机器人、服务机器人、医疗机器人等不同类别。
1.2 机器人的应用领域机器人技术在各个领域都有广泛的应用,例如工业生产、医疗卫生、航空航天、军事等。
工业机器人主要用于生产线上的加工、装配等任务;服务机器人可以用于家庭服务、餐饮业、物流配送等领域;医疗机器人可以用于手术辅助、康复治疗等。
第二章:机器人的组成和工作原理2.1 机器人的结构组成机器人通常由机械臂、传感器、执行器和控制系统等部分组成。
机械臂负责完成各种动作,传感器用于感知周围环境,执行器用于实现机械臂的运动,控制系统则负责控制机器人的动作和决策。
2.2 机器人的工作原理机器人的工作原理基于感知、决策和执行的过程。
首先,机器人通过传感器获取周围环境的信息;然后,通过控制系统对这些信息进行处理和分析,做出决策;最后,控制系统将决策结果发送给执行器,实现机器人的动作和任务执行。
第三章:机器人技术的关键技术3.1 机器人的感知技术感知技术是机器人实现自主执行任务的关键技术之一。
机器人通常通过摄像头、激光雷达等传感器获取周围环境的信息,并对这些信息进行处理和分析,以实现对环境的感知与认知。
3.2 机器人的决策技术决策技术是机器人实现智能行为的关键技术之一。
机器人通过对感知到的环境信息进行分析和处理,以及基于预设的规则和算法,做出适当的决策和行动计划,并实现自主执行任务的能力。
3.3 机器人的执行技术执行技术是机器人实现动作和任务执行的关键技术之一。
机器人通过执行器实现机械臂的运动和动作,具体包括电机驱动、液压驱动、气动驱动等不同形式。
库卡机器人使用手册第一章:机器人介绍库卡机器人是一款由德国公司KUKA开发的工业机器人,具有高精度、高效率和高灵活性的特点。
它可以广泛应用于各种工业领域,如汽车制造、电子产品生产、物流等。
库卡机器人拥有先进的控制系统和灵活的机械结构,可以完成各种复杂的操作任务,为企业提高生产效率和降低成本。
第二章:机器人结构1. 控制系统:库卡机器人采用先进的控制系统,可以实现高精度的运动控制和灵活的轨迹规划。
操作人员可以通过图形界面轻松地控制机器人的运动和任务执行。
2. 机械结构:库卡机器人采用轻量化的设计,具有高强度和高刚度,可以实现高速、高精度的运动。
机器人手臂可以实现多轴自由度的运动,灵活适应各种操作环境。
3. 传感器系统:库卡机器人配备了各种传感器系统,如视觉传感器、力传感器等,可以实现对环境和操作对象的感知和反馈,保证机器人的安全和稳定性。
第三章:机器人操作1. 启动与停止:按下启动按钮,机器人将进入工作状态;按下停止按钮,机器人将停止工作。
在启动前,需要确保机器人周围的安全区域没有人员和障碍物。
2. 示教操作:通过手动控制器或图形界面软件,可以对机器人进行示教操作,包括位置示教、轨迹示教等。
示教完成后,机器人可以自动执行任务。
3. 运动控制:可以通过手动控制器或图形界面软件实现对机器人的运动控制,如位置控制、速度控制、力控制等。
第四章:安全操作1. 安全防护:在启动机器人前,需要确保机器人的安全防护装置完好有效,以保证操作人员的安全。
2. 急停操作:在发生紧急情况时,可以按下急停按钮,立即停止机器人的运动。
在完成急停后,需要进行故障检查和复位操作。
3. 安全培训:使用库卡机器人需要接受相关的安全培训,了解机器人的操作规程和安全注意事项,避免发生意外事故。
第五章:维护保养1. 清洁保养:定期对机器人进行清洁和保养,包括清洁机械结构、检查电气连接、润滑轴承等,确保机器人的正常运行。
2. 故障排除:当机器人出现故障时,需要及时进行故障排除,包括检查传感器、诊断控制系统等。