第二章 状态空间模型
- 格式:ppt
- 大小:728.50 KB
- 文档页数:23

第2章控制系统的状态空间模型本章讨论动态系统的状态空间描述。
主要介绍在状态空间分析中所应用的数学模型----状态空间模型(也称状态空间表达式)的建立、状态空间模型的线性变换、MIMO 的传递函数阵、组合系统的状态空间模型,以及离散时间动态系统的状态空间模型。
本章最后介绍基于Matlab 的控制模型的建立与变换问题的程序设计与计算。
本章将力图让读者建立起状态、状态空间与状态空间变换的概念,掌握状态空间模型的建立方法,打下进行状态空间分析的基础。
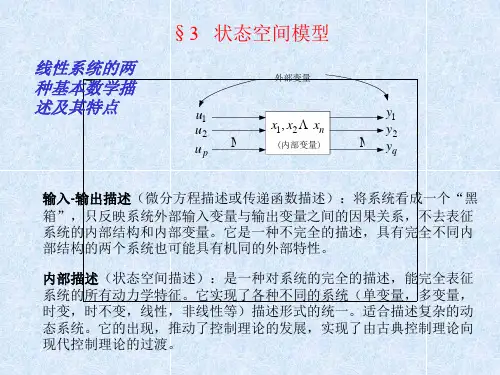
2.1 状态和状态空间模型2.1.1状态空间的基本概念1. 系统的状态和状态变量2. 系统的状态空间2.1.2系统的状态空间模型状态空间模型是应用状态空间分析法对动态系统所建立的一种数学模型,它是应用现代控制理论对系统进行分析和综合的基础。
状态空间模型由描述系统的动态特性行为的状态方程和描述系统输出变量与状态变量间变换关系的输出方程组成。
下面以一个由电容、电感等储能元件组成的电网络系统为例,说明状态空间模型的建立和形式,然后再进行一般的讨论。
1. 非线性时变系统状态空间模型由状态方程和输出方程组成。
其中,状态方程描述了系统内部各状态变量之间及其与各输入变量间的动态关系,输出方程则描述了系统输出是如何由状态变量和输入变量决定的。
因此,非线性时变系统的状态空间模型的形式为 ⎩⎨⎧==),,(),,(t t u x g y u x f x (2-6) 式中,x 为n 维状态向量;u 为r 维输入向量;y 为m 维输出向量;f (x ,u ,t )和g (x ,u ,t )分别为如下n 维和m 维关于状态向量x 、输入向量u 和时间t 的非线性向量函数2. 非线性定常系统若非线性时变系统的状态空间模型中不显含时间变量t ,则成为非线性定常系统的状态空间模型⎩⎨⎧==),(),(u x g y u x f x 式中,f (x ,u )和g (x ,u )分别为n 维和m 维关于状态向量x 和输入向量u 的非线性向量函数。
状态空间模型状态空间模型是一种用于描述动态系统行为的数学模型。
在状态空间模型中,系统的行为由状态方程和观测方程确定。
状态方程描述系统状态如何随时间演变,而观测方程则描述系统状态如何被观测。
通过利用状态空间模型,我们可以对系统进行建模、预测和控制。
状态空间模型的基本概念状态空间模型通常由以下几个要素构成:1.状态变量(State Variables):描述系统状态的变量,通常用向量表示。
状态变量是系统内部的表示,不可直接观测。
2.观测变量(Observation Variables):直接观测到的系统状态的变量,通常用向量表示。
3.状态方程(State Equation):描述状态变量如何随时间演变的数学方程。
通常表示为状态向量的一阶微分方程。
4.观测方程(Observation Equation):描述观测变量与状态变量之间的关系的数学方程。
状态空间模型的应用状态空间模型在许多领域都有着广泛的应用,包括控制系统、信号处理、经济学和生态学等。
其中,最常见的应用之一是在控制系统中使用状态空间模型进行系统建模和控制设计。
在控制系统中,状态空间模型可以用于描述系统的动态行为,并设计控制器来实现系统性能的优化。
通过对状态方程和观测方程进行数学分析,可以确定系统的稳定性、可控性和可观测性,并设计出满足特定要求的控制器。
状态空间模型的特点状态空间模型具有以下几个特点:1.灵活性:可以灵活地描述各种复杂系统的动态行为,适用于各种不同的应用领域。
2.结构化:将系统分解为状态方程和观测方程的结构使得系统的分析更加清晰和系统化。
3.预测性:通过状态空间模型,可以进行系统状态的预测和仿真,帮助决策者做出正确的决策。
4.优化性:可以通过状态空间模型设计出有效的控制器,优化系统的性能指标。
在实际应用中,状态空间模型可以通过参数估计和参数辨识等方法进行模型的训练和调整,以适应实际系统的特性。
结语状态空间模型是一种强大的数学工具,可以帮助我们理解和分析动态系统的行为。