光栅角位移角速度角加速度测量仪2
- 格式:pdf
- 大小:143.41 KB
- 文档页数:2
衍射光栅外差激光干涉法角振动校准技术研究
于梅;刘爱东;何闻;杨丽峰;左爱斌;胡红波
【期刊名称】《计量学报》
【年(卷),期】2015(036)006
【摘要】开展了角加速度校准方法的研究和基准装置的研制.介绍研制的稳态正弦角振动激励系统和衍射光栅马赫-泽德干涉仪,以及结合采用正弦逼近法外差测量技术.角加速度国家计量基准装置在角振动频率0.05 Hz~1.2 kHz、角位移大于300°和角加速度大于2000 rad/s2测量范围内,可实现角加速度幅值和相位的精确测量.实验数据和测量不确定度分析结果表明,装置校准高精度角加速度传感器的测量扩展不确定度优于1%(k=2).
【总页数】4页(P561-564)
【作者】于梅;刘爱东;何闻;杨丽峰;左爱斌;胡红波
【作者单位】中国计量科学研究院,北京100029;中国计量科学研究院,北京100029;浙江大学,浙江杭州310027;中国计量科学研究院,北京100029;中国计量科学研究院,北京100029;中国计量科学研究院,北京100029
【正文语种】中文
【中图分类】TB936
【相关文献】
1.基于外差激光干涉法的三轴向振动绝对校准方法研究 [J], 杨明;蔡晨光;刘志华;王颖
2.外差式激光干涉振动一次校准 [J], 周伦彬
3.激光干涉法一次振动校准的方法误差评判 [J], 周纶彬
4.用外差式激光干涉仪对动态位置的测量来进行加速计校准 [J], Sutt,C;许庆
5.高频振动外差激光干涉仪研究 [J], 左爱斌;于梅;马明德;杨丽峰;刘爱东
因版权原因,仅展示原文概要,查看原文内容请购买。

光栅尺原理及其应用光栅尺(Grating ruler)是一种光学测量仪器,其原理是利用光的干涉和衍射现象进行距离、角度和位移的测量。
光栅尺广泛应用于工程测量、机床控制、精密机械、光学仪器等领域。
光栅尺的原理是基于衍射和干涉现象。
光栅尺由一条分有许多等距的刻纹线的刻度尺组成,刻度线被均匀间隔的切割成小块,形成一系列等宽的透光条纹。
当入射光通过光栅尺时,每个透光条纹会发生衍射和干涉,形成衍射光栅,根据衍射光栅的模式,可以测量出光栅尺相对运动的距离、角度和位移。
光栅尺的应用主要有以下几个方面:1.机床控制:光栅尺广泛应用于机床的位置和位移测量。
光栅尺可以安装在机床上,通过测量光栅尺与工作台、刀架等物体的相对位置和位移来控制机床的运动。
由于光栅尺具有高精度、高分辨率和稳定性好等特点,因此可以实现精密机床的高速和高精度控制。
2.工程测量:光栅尺在工程领域常用于长度、角度和位移的测量。
例如,用光栅尺测量建筑物的长度、角度和水平度等参数,或者测量机械零件的尺寸和位置等。
由于光栅尺具有高测量精度和可靠性,可以满足工程测量中对精度和稳定性的要求。
3.光学仪器:光栅尺广泛应用于光学仪器中。
例如,用光栅尺测量显微镜中物体的尺寸和位置,或者用光栅尺测量光学元件的角度和偏移等。
由于光栅尺具有高分辨率和稳定性,可以提高光学仪器的测量精度和可靠性。
4.科学研究:光栅尺在科学研究中也有广泛的应用。
例如,用光栅尺测量物体的动态参数,如振动和加速度等。
光栅尺可以将物体的运动转化为光学信号,通过对光学信号的处理和分析,可以得到物体的运动参数。
由于光栅尺具有高灵敏度和快速响应的特点,可以满足科学研究中对运动参数测量的要求。
总之,光栅尺原理基于光的干涉和衍射现象,通过测量衍射光栅的模式,可以实现对距离、角度和位移等参数的测量。
光栅尺广泛应用于机床控制、工程测量、光学仪器和科学研究等领域,具有高精度、高分辨率和稳定性好等特点,可以满足各种领域中对测量精度和可靠性的要求。
饮料包装机送料系统槽轮机构的实验分析班级:08机设1班小组成员:何宏雷宋盈盈温月华指导教师:解明利2011-11-17饮料包装机送料系统槽轮机构的实验分析一、实验目的1.了解槽轮机构,掌握槽轮机构的工作特点,加深对课堂教学内容的理解;2.训练科学实验的基本技能和工程实践的基本方法,养成严谨的科学态度和工作作风;3.培养应用所学理论知识独立分析、解决实际问题的能力和实际动手能力;4.对槽轮运动构件进行运动检测分析(位移、速度、加速度分析)。
二、小组分工情况实验是科学研究的重要方法之一,通过实验对我们所设计的槽轮机构系统进行研究,得到相应的数据。
根据本次实验内容,我们共同研究了饮料包装机槽轮系统的受力情况和速度特性,对槽轮机构进行建模,然后进行Matlab数据分析,得出槽轮机构的位移、速度、加速度的特性。
根据以上的理论知识,我们进行了实验设计,通过光栅角位移传感器采集自己在实验台上拼装的槽轮机构的角速度,然后与理论数据进行比较。
我们小组具体做了如下分工:我主要负责搜集资料—阅读与实验项目的有关教科书及参考资料,做到明确目的、了解实验原理,参与实验进行;宋盈盈同学主要负责联系实验、安排实验流程、是实际实验的主要操作者;温月华同学主要是进行实验数据处理,进行实验分析,与理论相比较。
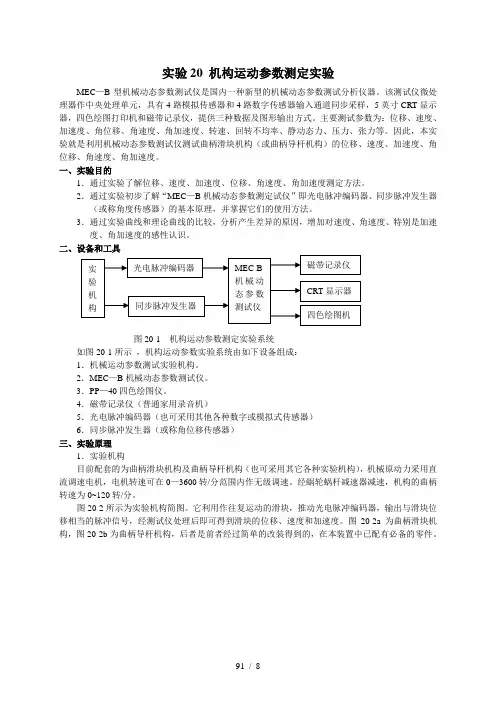
三、实验仪器PCC-II型平面机构创意组合及参数可视化分析实验台3.1实验台机械结构该实验台主要由底座(安装平台)、平面连杆机构、凸轮机构、间歇机构、齿轮传动机构、带(链)传动等机构组成,以及动驱动组成。
其中间歇机构包含槽轮机构、不完全齿轮机构、棘轮机构等。
可根据设计需要进行设计和拼装。
3.2底座(安装平台)的组成图1 安装平台的组成1.走条2.左垂直支撑3.横梁组件4.内六角圆柱头螺钉M8X355.右垂直支撑6.支承角钢7.直流电机8.电机带轮9.走条螺母10.底板3.2.1安装平台由固定在底板(10)上的左、右垂直支撑、走条(1)等构件组成。

角振动测量方法的研究刘爱东;于梅;何闻【摘要】中国计量科学研究院研制出频率范围0.000 5 Hz ~1 200 Hz高精度角振动基准装置,低频角振动装置最大角位移300°,中频角振动装置最大角位移60°,角加速度范围为0.04 rad/s2 ~2 000 rad/s2.装置实现了衍射式外差激光干涉仪测量方法,以及圆光栅和双光束外差激光干涉仪差动测量.角加速度复灵敏度测量不确定度(k=2):参考点优于0.5%,0.5°,通频带优于1.0%,1.0°.【期刊名称】《振动与冲击》【年(卷),期】2018(037)012【总页数】4页(P216-219)【关键词】角振动;角加速度;角速度;角位移;外差激光干涉仪;衍射光栅;正弦逼近法【作者】刘爱东;于梅;何闻【作者单位】中国计量科学研究院,北京100029;中国计量科学研究院,北京100029;浙江大学机械工程学院浙江省先进制造技术重点实验室,杭州310027【正文语种】中文【中图分类】TH825振动按位移形式可分为直线振动和角振动,角振动与直线振动在应用中同等重要,在航空航天飞行器姿态控制,交通运输工具转向以及平稳性行驶,机器人的研究与控制等存在大量的科学研究与应用。
德国物理技术研究院建立了0.3 Hz~1 000Hz的角振动计量标准装置,最大角位移60°,测量方法采用衍射光栅式外差激光干涉仪的测量法[1-2]。
韩国标准与科学研究院建立了8 Hz~5 000 Hz的角振动标准装置,测量方法为零差激光干涉仪与棱镜配合的测量方法[3-4]。
我国304所先后研制了低频角振动标准装置和中频角振动标准装置,其中低频角振动台采用电机拖动方式,使用圆光栅测量法,频率范围0.1 Hz~100 Hz。
中频角振动采用电磁原理,使用平面光栅和外差激光干涉仪测量法,频率范围10 Hz~550 Hz[5-6]。
中国计量科学研究院在2012年开展了角振动计量基准装置的研制,以及基于衍射光栅式外差激光干涉仪的正弦逼近法、双光束外差激光干涉仪差动法,圆光栅法等多种高精度角振动测量方法的研究,并于2015年建立了0.000 5 Hz~1 200 Hz的角振动计量装置,其中:0.05 Hz~1 200 Hz可精确复现角加速度幅值和相位;0.000 5 Hz~0.05 Hz可精确复现角速度和角位移幅值和相位。

称重传感器衡器上使用的一种力传感器。
电阻应变式称重传感器原理,它能将作用在被测物体上的重力按一定比例转换成可计量的输出信号。
不同使用地点的重力加速度和空气浮力对转换的影响,称重传感器的性能指标主要有线性误差、滞后误差、重复性误差、蠕变、零点温度特性和灵敏度温度特性等。
分类称重传感器按转换方法分为光电式、液压式、电磁力式、电容式、磁极变形式、振动式、陀螺仪式、电阻应变式等8类,以电阻应变式使用最广。
光电式包括光栅式和码盘式两种。
光栅式传感器利用光栅形成的莫尔条纹把角位移转换成光电信号(图2)。
光栅有两块,一为固定光栅,另一为装在表盘轴上的移动光栅。
加在承重台上的被测物通过传力杠杆系统使表盘轴旋转,带动移动光栅转动,使莫尔条纹也随之移动。
利用光电管、转换电路和显示仪表,即可计算出移过的莫尔条纹数量,测出光栅转动角的大小,从而确定和读出被测物质量。
码盘式传感器(图3)的码盘(符号板)是一块装在表盘轴上的透明玻璃,上面带有按一定编码方法编定的黑白相间的代码。
加在承重台上的被测物通过传力杠杆使表盘轴旋转时,码盘也随之转过一定角度。
光电池将透过码盘接受光信号并转换成电信号,然后由电路进行数字处理,最后在显示器上显示出代表被测质量的数字。
光电式传感器曾主要用在机电结合秤上。
液压式如图4所示,在受被测物重力P作用时,液压油的压力增大,增大的程度与P成正比。
测出压力的增大值,即可确定被测物的质量。
液压式传感器结构简单而牢固,测量范围大,但准确度一般不超过1/100。
电磁力式它利用承重台上的负荷与电磁力相平衡的原理工作。
当承重台上放有被测物时,杠杆的一端向上倾斜;光电件检测出倾斜度信号,经放大后流入线圈,产生电磁力,使杠杆恢复至平衡状态。
对产生电磁平衡力的电流进行数字转换,即可确定被测物质量。
电磁力式传感器准确度高,可达1/2000~1/60000,但称量范围仅在几十毫克至10千克之间。
电容式它利用电容器振荡电路的振荡频率f与极板间距d 的正比例关系工作。
广联分享德国kubler编码器的基本原理kubler编码器是通过把机械角度物理量的变化转变成电信号的一种装置:在传感器的分类中,他归属于角位移传感器。
根据编码器的这一-特性,编码器主要用于测量转动物体的角位移量,角速度,角加速度,通过编码器把这些物理量转变成电信号输出给控制系统或仪表,控制系统或仪表根据这些量来控制驱动装置。
kubler编码器基本原理构造编码器主要是由码盘(圆光栅、指示光栅)、机体、发光器件、感光器件等部件组成。
(1)圆光栅是由涂膜在透明材料或刻画在金属材料上的成放射状的明暗相间的条纹组成的。
一个相邻条纹间距称为-一个栅节,光栅整周栅节数就是编码器的脉冲数(分辨率)。
(2)指示光栅是一片固定不动的,但窗口条纹刻线同圆光栅条纹刻线相同的光栅片。
(3)机体是装配圆光栅,指示光栅等部件的载体。
(4)发光器件一般是红外发光管。
(5)感光器件是高频光敏元件:一般有硅光电池和光敏三极管。
库伯勒编码器的工作原理由圆光栅和指示光栅组成--对扫描系统,在扫描系统的一侧投射--束红外光,在扫描系统的另一侧的感光器件就可以收到扫描光信号:当圆光栅转动时,感光器件接收到的扫描光信号会发生变化,感光器件可以把光信号转变成电信号并输出给控制系统或仪表。
一般编码器的输出信号为两列成90度相位差的Sin信号和Cos信号(这是由指示光栅的窗口条纹刻线保证的) ;这些信号的周期等于圆光栅转过一个栅节(P)的移动时间,对Sin 信号和Cos信号进行放大及整形就可输出方波脉冲信号。
kubler编码器的应用场合十分的广泛,在此列举几个简单事例:(1)数控机床对加工工件自动检测就是通过编码器来进行检测的:数控机床刀架的对零校准也是通过编码器来实施的。
(2)编码器在PLC.上的应用:一般PLC.上都有高速信号输入口,编码器可以作为高速信号输入元件,使PLC更加迅速和精准地实施闭环控制。
而在变频器上其一般接变频器的 PG卡上。
光电旋转编码器在角度测量中的应用光电旋转编码器(Optical Rotary Encoder)是一种用于测量旋转角度的装置,它通过光学原理和编码技术,将旋转轴的位置转化为电信号输出。
光电旋转编码器广泛应用于各种领域,包括机械制造、自动化控制、测量仪器等。
本文将从基本原理、工作原理、应用领域等多个方面对光电旋转编码器在角度测量中的应用进行深入探讨。
一、基本原理光电旋转编码器的基本原理是通过固定在旋转轴上的圆盘或转子上的光栅条纹或刻度尺,利用透射光或反射光的原理,通过光电传感器接收器件对光栅条纹进行读取,进而转化为电信号。
通常,光源和光电传感器会固定在旋转编码器的固定部分上,而光栅条纹或刻度尺则固定在旋转部分上。
光电旋转编码器的输出信号通常为脉冲信号,通过测量脉冲的数量和方向,可以计算出旋转轴的位置和速度。
二、工作原理光电旋转编码器的工作原理可以简单分为两种类型:增量式和绝对式。
1. 增量式编码器增量式编码器是通过测量旋转轴的位置的变化量来计算旋转角度的,它输出的信号类似于脉冲。
增量式编码器通常由一对光栅或刻度尺组成,一对光栅或刻度尺之间的间隔可以表示精度。
当旋转轴转动时,光电传感器会检测到光栅或刻度尺上的条纹变化,输出相应的脉冲信号。
通过对脉冲信号进行计数和分析,可以测量出旋转轴的角度。
然而,增量式编码器的主要限制是无法恢复到绝对位置。
2. 绝对式编码器绝对式编码器的工作原理类似于增量式编码器,但它的输出信号可以表示旋转轴的绝对位置。
绝对式编码器通常由多个位域和编码器组成,每个编码器都有唯一的编码规则和位域。
当旋转轴转动时,光电传感器会读取每个编码器的位域信号,并将其转换为旋转轴的角度。
绝对式编码器的优势在于可以在任何时候恢复到绝对位置,不需要再进行原点复位。
三、应用领域光电旋转编码器在角度测量中的应用非常广泛,以下列举了一些常见的应用领域。
1. 机械制造在机械制造领域中,光电旋转编码器被广泛应用于机床、机器人、印刷设备、3D 打印机等设备中。
加速度计和陀螺仪是导航和控制系统中的重要传感器,它们在测量和计算角度、角速度时都存在误差。
加速度计的误差主要来源于测量加速度时的随机误差和系统误差,以及角速度测量时的积分误差。
加速度计的随机误差可以通过增加测量次数和采用滤波算法来减小,系统误差可以通过标定和补偿来减小。
但是,由于加速度计的积分误差随着时间的推移而累积,会导致角速度计算的误差逐渐增大。
陀螺仪的误差主要来源于机械旋转轴的偏心和机械摩擦等,这些误差可以通过高精度的制造和标定来减小。
同时,陀螺仪的随机误差也会影响角度测量的精度,需要通过增加测量次数和使用滤波算法来减小。
在无陀螺捷联惯导系统中,加速度计用于测量角速度和加速度,而陀螺仪用于测量角度和角速度。
由于加速度计的误差会随着时间的推移而累积,因此需要采用观测方程对积分误差进行补偿,以减小导航误差。
同时,为了减小随机误差和系统误差对加速度计测量的影响,可以采用滤波算法和补偿算法进行数据处理。
总之,加速度计和陀螺仪在测量角度、角速度时都存在误差,需要根据具体情况选择合适的方法进行误差补偿和处理。