FJ0905舵机实例
- 格式:ppt
- 大小:19.58 MB
- 文档页数:20
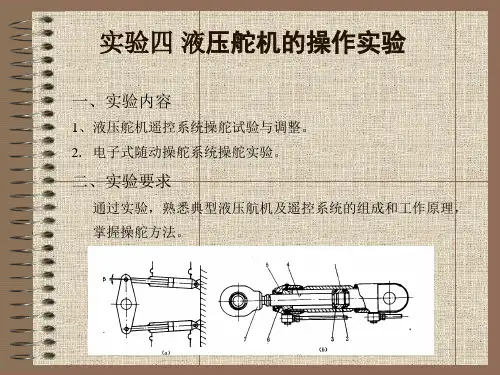
实验三液压舵机的操作实验一、实验内容1、液压舵机遥控系统操舵试验与调整。
2. 电子式随动操舵系统操舵实验。
二、实验要求通过实验,熟悉典型液压航机及遥控系统的组成和工作原理,掌握操舵方法。
三、实验设备YD100 -1.6 / 28型液压舵机1套D D1型电子随动操舵仪1台(一)YD100 - 1.6 / 28型液压舵机该舵机由广西梧州华南船舶机械厂制造。
现装于辅机实验室内。
其主要技术数据如下:型号:Y D100- 1.6/ 2 8公称力矩: 1.6 t m(15.6 KN.M)转舵时间:28 sec最大转角正负35度工作压力:100 kg/cm2 (9.81MPa)安全阀调整压力:110kg/cm2 (10.8MPa)电动机型号:JO2H-12-4(Y80L2一4)电动机功率:0.8 kW电动机转速: 1500 r.p.m.电动机电压。
380 V油泵型号;10 SCYI4一1油泵排量;10 m L/r最大工作压力:320 kg/cm2(31.4MPa)电磁阀型号: 34 E 1M-B10H-T电磁阀流量:40L/min电磁阀最大工作压力:210 kg/cm2(20.59 MPa)溢流阀型号:Y E-B10 C电磁阀流量:40 L/min溢流阀最大工作压力:140 kg/cm2(13.73MPa)注:转舵时间系指单机而言,双机组工作时,转舵速度可提高一倍。
1.转舵机构舵机的转舵机构是采用柱塞式油缸,柱塞的往复运动通过拨叉机构转换为舵柄的转动。
所以,舵机的输出力矩与工作油压的关系为(见图3—1)。
πd2R△PM= Z η4 cos2a式中:Z——油缸对数(Z=1)d——柱塞直径(d=10cm)R——舵杆中线到油缸中心线的垂直距离(R=18cm)△P——油缸压差(△P=P1—P2)η——推舵装置机械效率(η≈0.8)a——舵的转角舵机力矩特性M=f(a)如图3—2所示。
舵机公称力矩系指舵机转动舵杆的最大力矩,即舵的转角为35°时舵机的输出力矩。
51单片机控制9g迷你舵机,亲测可用(2)/*为9克迷你舵机量身打造的精简51程序。
开机后舵机有旋转。
之后按下按键key1,舵机开始旋转*//*欢迎志同道合的朋友私信交流*/#include#define uint unsigned int#define uchar unsigned charuchar k; //k表示总时间因为定时器中断要用到k,所以放在程序头sbit PWM1=P1^0;sbit key1=P3^7; //舵机启动开关void init(){TMOD=0X01;TH0=(65536-92)/256;TL0=(65536-92)%256;EA=1;ET0=1;TR0=1;}void jiman20() //51模拟PWM波函数{static uchar flag=0,j=0; //flag当做PWM高电平变宽/变窄的标志;//j表示高电平持续的时间;k表示总时间.因为重复调用该函数if(k==200) //第一步:判断计时满20ms.k=0; //k归零if(flag==0) //标志为0时,高电平标志增加j++;else //标志为1时,高电平标志减小j--;if(j>=25) //当j=25时,高电平持续时间为2.5ms,此时角度为180.flag=1; //必须改变宽/窄标志。
if(j<=0) //当j=0时,高电平持续时间为0ms,此时角度为0.flag=0; //必须改变宽/窄标志。
}if(kPWM1=1; //因为每20ms,k就归0.所以能通过判断k<j,输出高电平else PWM1=0;}void main(){uint i=60000;init();while(i--) //一开机就让舵机有一个转动{jiman20();}while(1){while(key1==0) //当开关打开,启动定时器,进入转动程序并循环TR0=1;jiman20();}TR0=0; //当开关关闭,关闭定时器,舵机保持最末时刻状}}void timer() interrupt 1 //定时器计时0.1ms,即模拟PWM是以0.1s为分度,//高电平逐渐增加/减少{TR0=0;TH0=(65536-92)/256;TL0=(65536-92)%256;TR0=1;k++;}</j,输出高电平。
单片机舵机实例引言:舵机是一种常见的电机,其具有控制角度的特点,被广泛应用于机械臂、机器人、航模等领域。
单片机作为一种重要的控制器件,能够实现对舵机的精确控制。
本文将以一个单片机舵机实例为例,介绍如何通过单片机控制舵机的运动。
一、硬件准备:1. 单片机:选择一款适用的单片机,如STC89C52等。
2. 舵机:选择适用的舵机,可以根据实际需求选择合适的规格和型号。
3. 电源:提供稳定的电源供给舵机和单片机。
二、连接电路:1. 将舵机的信号线连接到单片机的一个IO口上,用于控制舵机的角度。
2. 将舵机的电源线连接到电源正极,将舵机的地线连接到电源负极,确保舵机有足够的电源供给。
三、软件编程:1. 初始化:在程序开始时,需要对单片机进行初始化,包括设置IO口的工作模式、定时器的配置等。
2. 控制舵机:通过向舵机的信号线发送不同的脉冲宽度来控制舵机的角度。
一般来说,舵机的工作范围为0-180度,对应的脉冲宽度为0.5-2.5ms。
通过改变脉冲宽度的值,可以控制舵机在不同角度停留。
3. 控制循环:为了使舵机能够持续运动,可以使用一个循环结构,不断改变舵机的角度,实现舵机的连续运动。
四、实例演示:下面以一个简单的舵机摇头机器人为例,演示如何通过单片机控制舵机的运动。
1. 硬件搭建:将舵机安装在摇头机器人的头部,确保舵机能够自由地摇动。
然后,将舵机的信号线连接到单片机的一个IO口上,将舵机的电源线连接到电源正极,将舵机的地线连接到电源负极。
最后,连接电源,确保舵机和单片机正常工作。
2. 软件编程:使用C语言编写单片机程序,实现舵机的控制。
首先进行初始化设置,包括IO口的配置和定时器的设置。
然后,在控制循环中,通过改变舵机信号线的脉冲宽度,实现舵机的摇头运动。
可以根据需要设置舵机的运动速度和范围,以及摇头的频率和幅度。
3. 运行效果:将程序下载到单片机中,连接电源,摇头机器人的舵机将开始工作。
舵机会根据程序中设定的运动规律,不断摇动头部,实现摇头机器人的动作。
船舶舵机跑舵P SC典型案例分析杜荣耀周亚旭摘要:船舶舵机是保障船舶正常航行的关键设备之一,舵机的工况是否良好对一艘船舶的安全营运有着直接影响。
以PSC案例为出发点,从PSC检查中发现的一起舵机跑舵实例具体展开,通过运用分步排除法逐步排查舵机故障原因,结合该类型故障呈现特点,建议航运公司自行开展排查,并对航运公司、船员在维护保养上提出相应要求,对PSC检查人员处理该类型缺陷提出建议。
关键词:PSC;舵机;跑舵;SOLASDOI:10.16176/ki.21-1284.2018.10.009一、前言舵机是船舶保持航向的关键设备,船上习惯笼统地将转舵机构、动力设备、辅助设备和相关电控系统等统称为舵机。
目前绝大多数船舶舵机都是靠转动舵叶使其有不同的舵角来控制船舶航向的。
船舶上的舵机大多数为电动液压舵机。
船舶舵机按其工作原理可分为阀控型和泵控型两种。
阀控型舵机的基本工作原理为:液压舵机系统使用单向定量液压泵供液压油,通过电磁阀来控制油路方向,从而改变舵的转动方向。
此种液压舵机及其控制系统相对简单,造价相对较低。
缺点是任何时候泵都以全流量排油,经济性稍差,适用功率比泵控型要小。
泵控型液压舵机基本工作原理为:液压舵机系统是采用了双向变量泵,通过伺服机构控制泵的排油方向来控制油路方向,从而改变舵的转动方向。
舵机按转舵机构的不同可以分为往复式舵机和转叶式舵机。
往复式舵机通过若干个活塞来控制舵叶转向,转叶式舵机通过反向工作的叶片泵来控制舵叶转向。
舵机是保证船舶的操纵性能、确保船舶安全航行的重要设备,保持船舶舵机工作性能良好对于船舶安全具有重要意义。
二、船舶舵机相关公约要求1.公约适用范围船舶舵机的要求是来自《1974年国际海上人命安全公约》附则第II-1章第29条操舵装置和第30条电动和电动液压操舵装置的附加要求这两条的要求。
《1974年国际海上人命安全公约》1981年修正案(MSC.1(45))对附则II-1章1-54条进行了重写,形成本章的第29条操舵装置和第30条电动和电动液压操舵装置的附加要求,并于1984年9月1日生效。
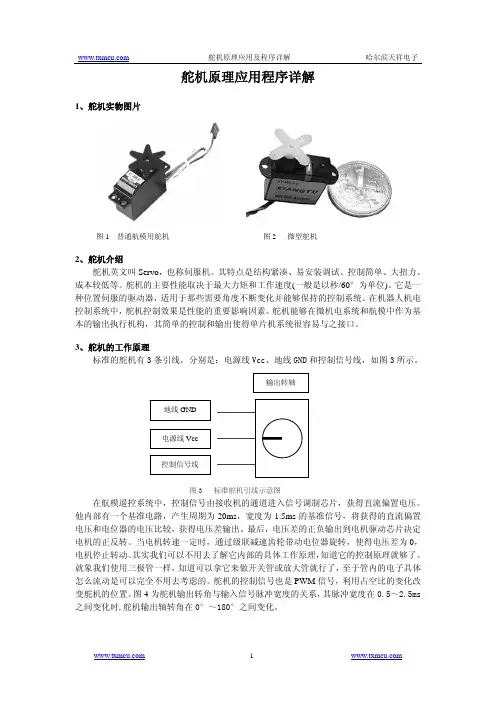
∙舵机的工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
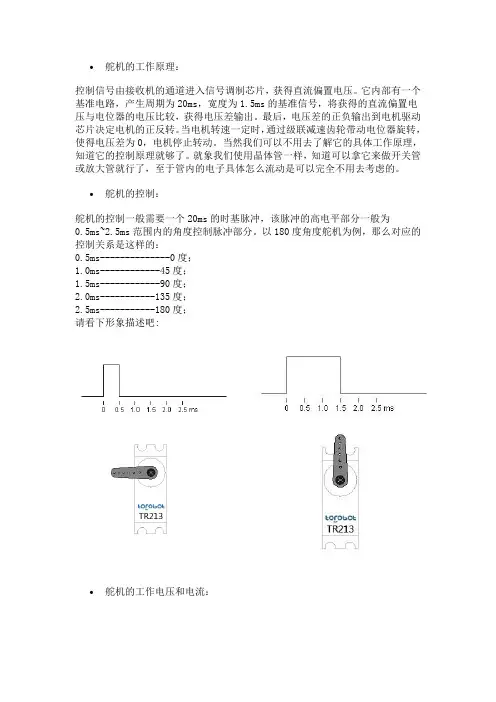
∙舵机的控制:舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;请看下形象描述吧:∙舵机的工作电压和电流:每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V,TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。
六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
舵机三根线的区分:信号线接单片机I/O口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O口直接控制;电源正极,接输入电源的正极;地线,接输入电源的负极;备注:如果控制部分和电源部分是分开的,两者一定要共地。
船舶舵机跑舵PSC典型案例分析摘要:船舶舵机是保障船舶正常航行的关键设备之一,舵机的工况是否良好对一艘船舶的安全营运有着直接影响。
以PSC案例为ft发点,从PSC检查中发现的一起舵机跑舵实例具体展开,通过运用分步排除法逐步排查舵机故障原因,结合ftPSC一、前言舵机是船舶保持航向的关键设备,船上习惯笼统地将转舵机构、动力设备、辅助设备和相关电控系统等统称为舵机。
目前绝大多数船舶舵机都是靠转动舵叶使其有不同的舵角来控制船舶航向的。
船舶上的舵机大多数为电动液压舵机。
船舶舵机按其工作原理可分为阀控型和泵控型两种。
阀控型舵机的基本工作原理为:液压舵机系统使用单向定量液压泵供液压油,通过电磁阀来控制油路方向,从而改变舵的转动方向。
此种液压舵机及其控制系统相对简单,造价相对较低。
缺点是任何时候泵都以全流量排油,经济性稍差,适用功率比泵控型要小。
泵控型液压舵机基本工作原理为:液压舵机系统是采用了双向变量泵,通过伺服机构控制泵的排油方向来控制油路方向,从而改变舵的转动方向。
舵机按转舵机构的不同可以分为往复式舵机和转叶式舵机。
往复式舵机通过若干个活塞来控制舵叶转向,转叶式舵机通过反向工作的叶片泵来控制舵叶转向。
舵机是保证船舶的操纵性能、确保船舶安全航行的重要设备,保持船舶舵机工作性能良好对于船舶安全具有重要意义。
二、船舶舵机相关公约要求1.公约适用范围船舶舵机的要求是来自《1974年国际海上人命安全公约》附则第II-1章第29条操舵装置和第30条电动和电动液压操舵装置的附加要求这两条的要求。
《1974年国际海上人命安全公约》1981年修正案(MSC.1(45))对附则II- 1 章1-54条进行了重写,形成本章的第29条操舵装置和第30条电动和电动液压操舵装置的附加要求,并于1984年9月1日生效。
即于1984年9月1日或以后安放龙骨或处于类似建造阶段的船舶,都适用第29条和30条。
第II-1章第29条操舵装置的最新修订是2014年的MSC.365(93),是对舵机海试要求的明确,对PSC检查无影响。
舵机
先抄一段说明:舵机,又称伺服马达,是一种具有闭环控制系统的机电结构。
舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由控制器发出PWM(脉冲宽度调制)信号给舵机,经电路板上的IC处理后计算出转动方向,再驱动无核心马达转动,透过减速齿轮将动力传至摆臂,同时由位置检测器(电位器)返回位置信号,判断是否已经到达设定位置,一般舵机只能旋转180度。
舵机结构图
舵机有3根线,棕色为地,红色为电源正,橙色为信号线,但不同牌子的舵机,线的颜色可能不同。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比(1.占空比是指高电平在一个周期之内所占的时间比率。
2. 正脉冲的持续时间与脉冲总周期的比值。
例如:正脉冲宽度1μs,信号周期10μs的脉冲序列占空比为0.1。
即:脉冲的宽度除以脉冲的周期称为占空比。
)来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms到2.5ms之间,脉宽和舵机的转角0°~180°相对应。