液压舵机的遥控系统
- 格式:ppt
- 大小:954.00 KB
- 文档页数:14
第九章舵机steering gear•第一节舵的作用原理和对舵机的要求•第二节液压舵机的工作原理和基本组成•第三节液压舵机的转舵机构•第四节液压舵机的遥控系统•第五节舵机液压系统实例•第六节液压舵机的管理•复习思考题第一节舵的作用原理和对舵机的要求•一、舵的作用:•船舶的操纵性,是船舶的主要航行性能之一。
舵是船舶操纵装置的一个重要部件。
舵是一块平板或具有流线型截面的板,称为舵叶。
装在船尾中纵剖面或对称于中纵剖面的位置上。
它垂直地浸没在水中,并能绕舵轴转动。
舵是船舶的一种十分重要和不可缺少的专用舾装设备。
可以想象,如果船没有舵,或舵失灵,就象汽车没有方向盘一样,将无法行驶)在大海里任凭风浪摆布。
无主动航向的船不仅不能保证航行的安全,而且是不能到达目的港的。
•舵是舵手(驾驶人员)用来保持或改变船舶在水中运动方向的专用设备。
•舵有两大功能:•一是保持船舶预定航向的能力,称为航向稳定性;•二是改变船舶运动方向的能力,称回转性。
•通常把二者统称为船舶的操纵性。
船舵主要由舵叶和舵杆组成,舵叶是产生水压力的部分,舵杆的作用是转动舵叶和保证舵叶具有足够的强度)舵的作用原理是当水流以某冲角冲至舵叶上时,便产生了流体动力,此作用力通过舵杆传递并船体上,从而迫使船舶转向,也就达到了调整航向的目的。
•舵从帆船时代的简单平板舵发展到今天的流线型舵,不断得到改进,现普通舵和特种舵已有十几种类型。
近个时期,随着科学技术的发展,还出现了一些推进设备也兼有舵设备的功能。
舵的种类很多,分类的方法也很多,有按支承情况、舵杆位置、剖面形状分类的,也有按结构形式和使用功能分的。
•舵的分类:•(一)按舵的支承情况来分1.多支承舵:船体尾柱连有三个以上的舵钮。
2.半悬式舵:下支承的位置在舵的半高处。
3.悬式舵:挂在舵杆上的。
4.双支承舵:除了上支承儿还有一个安在舵根的下支承。
•(二)按舵杆轴线位置来分1.不平衡舵:舵叶位于舵杆轴线之后。
2.半平衡舵:一般就是半悬式舵。

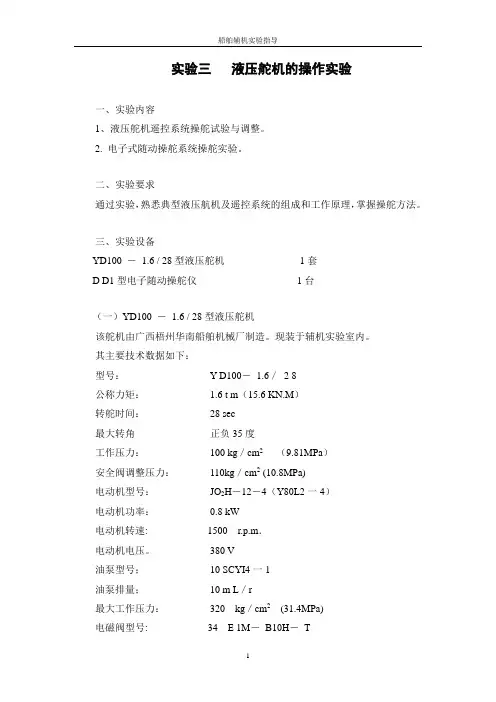
实验三液压舵机的操作实验一、实验内容1、液压舵机遥控系统操舵试验与调整。
2. 电子式随动操舵系统操舵实验。
二、实验要求通过实验,熟悉典型液压航机及遥控系统的组成和工作原理,掌握操舵方法。
三、实验设备YD100 -1.6 / 28型液压舵机1套D D1型电子随动操舵仪1台(一)YD100 - 1.6 / 28型液压舵机该舵机由广西梧州华南船舶机械厂制造。
现装于辅机实验室内。
其主要技术数据如下:型号:Y D100- 1.6/ 2 8公称力矩: 1.6 t m(15.6 KN.M)转舵时间:28 sec最大转角正负35度工作压力:100 kg/cm2 (9.81MPa)安全阀调整压力:110kg/cm2 (10.8MPa)电动机型号:JO2H-12-4(Y80L2一4)电动机功率:0.8 kW电动机转速: 1500 r.p.m.电动机电压。
380 V油泵型号;10 SCYI4一1油泵排量;10 m L/r最大工作压力:320 kg/cm2(31.4MPa)电磁阀型号: 34 E 1M-B10H-T电磁阀流量:40L/min电磁阀最大工作压力:210 kg/cm2(20.59 MPa)溢流阀型号:Y E-B10 C电磁阀流量:40 L/min溢流阀最大工作压力:140 kg/cm2(13.73MPa)注:转舵时间系指单机而言,双机组工作时,转舵速度可提高一倍。
1.转舵机构舵机的转舵机构是采用柱塞式油缸,柱塞的往复运动通过拨叉机构转换为舵柄的转动。
所以,舵机的输出力矩与工作油压的关系为(见图3—1)。
πd2R△PM= Z η4 cos2a式中:Z——油缸对数(Z=1)d——柱塞直径(d=10cm)R——舵杆中线到油缸中心线的垂直距离(R=18cm)△P——油缸压差(△P=P1—P2)η——推舵装置机械效率(η≈0.8)a——舵的转角舵机力矩特性M=f(a)如图3—2所示。
舵机公称力矩系指舵机转动舵杆的最大力矩,即舵的转角为35°时舵机的输出力矩。
第九章舵机steering gear•第一节舵的作用原理和对舵机的要求•第二节液压舵机的工作原理和基本组成•第三节液压舵机的转舵机构•第四节液压舵机的遥控系统•第五节舵机液压系统实例•第六节液压舵机的管理•复习思考题第一节舵的作用原理和对舵机的要求•一、舵的作用:•船舶的操纵性,是船舶的主要航行性能之一。
舵是船舶操纵装置的一个重要部件。
舵是一块平板或具有流线型截面的板,称为舵叶。
装在船尾中纵剖面或对称于中纵剖面的位置上。
它垂直地浸没在水中,并能绕舵轴转动。
舵是船舶的一种十分重要和不可缺少的专用舾装设备。
可以想象,如果船没有舵,或舵失灵,就象汽车没有方向盘一样,将无法行驶)在大海里任凭风浪摆布。
无主动航向的船不仅不能保证航行的安全,而且是不能到达目的港的。
•舵是舵手(驾驶人员)用来保持或改变船舶在水中运动方向的专用设备。
•舵有两大功能:•一是保持船舶预定航向的能力,称为航向稳定性;•二是改变船舶运动方向的能力,称回转性。
•通常把二者统称为船舶的操纵性。
船舵主要由舵叶和舵杆组成,舵叶是产生水压力的部分,舵杆的作用是转动舵叶和保证舵叶具有足够的强度)舵的作用原理是当水流以某冲角冲至舵叶上时,便产生了流体动力,此作用力通过舵杆传递并船体上,从而迫使船舶转向,也就达到了调整航向的目的。
•舵从帆船时代的简单平板舵发展到今天的流线型舵,不断得到改进,现普通舵和特种舵已有十几种类型。
近个时期,随着科学技术的发展,还出现了一些推进设备也兼有舵设备的功能。
舵的种类很多,分类的方法也很多,有按支承情况、舵杆位置、剖面形状分类的,也有按结构形式和使用功能分的。
•舵的分类:•(一)按舵的支承情况来分1.多支承舵:船体尾柱连有三个以上的舵钮。
2.半悬式舵:下支承的位置在舵的半高处。
3.悬式舵:挂在舵杆上的。
4.双支承舵:除了上支承儿还有一个安在舵根的下支承。
•(二)按舵杆轴线位置来分1.不平衡舵:舵叶位于舵杆轴线之后。
2.半平衡舵:一般就是半悬式舵。

液压式船舶舵机控制系统设计与仿真液压式船舶舵机控制系统是现代船舶的重要部分之一,其作用是通过电子控制系统对船舶的操纵进行精确调节,以确保船舶行驶和操作的安全性和可靠性。
本文主要探讨液压式船舶舵机控制系统的设计和仿真,包括系统结构、控制方法和参数设置。
首先,液压式船舶舵机控制系统主要由舵机、液压系统、控制器和电源组成。
其中,舵机是实现方向转向的主要装置,液压系统提供油压力来驱动舵机进行动作,控制器负责接收船长的指令并输出控制信号来控制油的流动,电源则为整个系统供电。
其次,液压式船舶舵机控制系统的控制方法一般采用PID控制,即比例、积分、微分控制。
其实质是通过根据实际舵角和期望舵角的误差对控制信号进行反馈和调整,从而实现对舵机的精确定位和控制。
具体来说,将期望舵角和当前舵角的差值作为控制系统的输入,经过PID控制计算得到控制信号输出,控制信号通过控制阀门控制油的流动来控制舵机动作,从而实现舵机的转向。
最后,液压式船舶舵机控制系统的参数设置包括PID参数和液压系统参数两部分。
PID参数设置要根据具体的船舶工况和舵机参数进行调整,比例系数、积分时间和微分时间都需要进行优化,以达到最佳控制效果。
液压系统参数则包括油压力、油箱容积、油缸容积、控制阀门开度等参数,这些参数的设置也需要根据实际情况进行调整,以确保液压系统的工作稳定可靠。
在仿真方面,可以采用MATLAB/Simulink等工具进行模拟,具体步骤包括建立船舶控制系统的数学模型、进行仿真验证、调整参数、再次验证。
通过仿真,可以直观地了解系统的工作流程和控制效果,同时也可以有效地优化系统控制参数,提高系统的性能和稳定性。
总之,液压式船舶舵机控制系统的设计和仿真是现代船舶中非常重要的一环,需要仔细考虑和优化。
在设计和仿真中,需要注意系统结构、控制方法和参数设置等问题,同时还要进行严格的仿真验证和参数调整,以确保系统的工作效果和性能。
数据分析是现代数据科学中的重要一环,通过对数据进行收集、整理、处理和分析,可以从中得出有用的结论和洞察,为决策和应用提供有力的支持和指导。
电动液压舵机的远操机构1.液压式由驾驶台的手动换向阀和舵机房的液动换向阀组成了电动液压舵机的液压式远操机构。
当扳动手动换向阀,改变或停止进入液动换向控制油的方向时,就可以改变或停止主油路动力油进入油缸的方向或停止进油,从而使舵左.右偏转或停止,使船转向或保持航向。
2.电力式由驾驶台的转换开关舵机房的电磁换向阀组成了电动液压舵机的电力式远操机构。
当扳动转换开关,改变电磁换向阀电磁线圈电流的通.断方向时,就可以改变或停止主油路动力油进入油缸的方向或停止进油,从而使舵左.右偏转或停止,使船转向或保持航向。
3.电液式由驾驶台的电位开关的舵机房的电液换向阀组成了电动液压舵机的电液式远操机构。
当扳动电位开关,改变电液换向阀电磁线圈电流的通.断方向,控制油使电磁阀换向时,就可以改变主油路动力油进入油缸的方向或停止进油,从而使舵左.右偏转或停止,使船转向或保持航向。
4.随动式由驾驶台的发送器.舵机房的受动器和追随机构组成了电动液压舵机的随动式远操机构。
当扳动发送器手轮,改变或停止供入受动器油缸油液方向和油量的多少,通过追随机构,就可以改变或停止油泵变向变量机构偏心的方向和偏心距的大小,从而改变或停止油泵的吸.排方向和油量大小,使进入油缸的油液方向改变或停止,从而使舵左.右偏转或停止,使船转向或保持航向。
5.电气式由驾驶台的转换开关.舵机房的直流电机.传动齿轮和电磁啮合器和追随机构组成了电动液压舵机的电气式应急远操机构。
当接通应急电源,旁通阀打开和啮合器合上,扳动转换开关,停止或改变直流电机电流方向,使受动器拉杆左.右移动或停止,通过追随机构,就可以改变或停止变向变量泵偏心的方向和偏心距的大小,从而改变或停止油泵的吸排方向,使进入油缸的油液方向改变或停止,从而使舵左.右偏转或停止,使船转向或保持航向。
船用液压阀门遥控系统原理在船舶的世界里,液压阀门遥控系统就像是船上的“心脏”,真是个不得了的玩意儿。
这玩意儿可不是你随便能碰的,它可是要在波涛汹涌的海面上,帮你操控船舶的关键。
想象一下,你在一艘大船上,风大浪急,你只需轻轻一按按钮,阀门就能立马响应,简直就是神奇到不行!咱们得聊聊这个液压系统的基本原理。
这个系统的工作方式跟咱们平常用的水龙头有点像,只不过它可是把水压放大了好几倍。
你看,液压油在管道里流动,带着一股子力量,推动阀门的开关。
就像你和朋友一起玩拔河,力量大的那一方总能把对方拽过来。
液压油就担当了这个“力量大”的角色,推动着各种机械部件,完成了阀门的开关。
说到遥控,这可是个了不起的发明。
船上的操控员就像是一个指挥家,坐在舵轮前,轻松自如地发号施令。
手指轻轻一点,阀门就开始动作,不用在风雨中费劲去拉拉扯扯。
这样的设计真是让人感叹科技的进步,真是比过去的手动操控方便多了。
以前可得亲力亲为,拼命和那些沉重的阀门较劲,累得像条狗。
这液压阀门的优势可不仅仅在于操控方便,关键还在于它的反应速度。
就拿船舶的导航来说吧,瞬息万变的海上环境,如果你反应不够快,船就可能偏离航向,危险可就来了。
这个系统就像一位老练的水手,灵活自如,随时能应对突发状况。
舵手一发令,阀门立马执行,速度快得让人瞠目结舌,真是有了它,航海再也不怕了。
这种高科技的东西也不是没有风险。
万一系统出现故障,那可真是雪上加霜。
想象一下,你正在大海上行驶,突然间阀门不听话,船就有可能失控,那个时候可得靠天吃饭了。
所以,平时的维护和检查可得落到实处。
像老妈对子女的叮嘱一样,别懈怠,别掉以轻心,安全才是第一位的。
说到维护,很多人可能会想,这玩意儿是不是特别复杂。
液压系统的设计早已考虑到了这一点,很多部件都可以简单拆装。
就像拼图一样,把零件放回去就行了,没啥大不了的。
只要你勤于保养,定期检查,保持油液清洁,这套系统就能稳定地为你服务,真是一举两得。
这种遥控系统还特别适合现代化的船舶,不论是货轮、游轮,还是军舰,都能找到它的身影。
电液舵机操纵系统
电液舵机操纵系统(control system of electrohydraulic steering gear) 是指电动液压操舵装置中,操纵推舵油液的通断和流向的控制系统。
在以变量变向液压泵为动力源的舵机中,操纵系统的操纵对象是液压泵的变量机构;在以定量定向液压泵为动力源的舵机中,操纵系统的操纵对象是换向阀。
通过操纵变量机构或换向阀的不同位置,改变推舵油液的通断和流向,从而使舵向各方向转动或停止。
液压舵机的操纵一般均在驾驶室远距离进行,其操纵系统包括发令部分和接收部分,分别置于驾驶室和舵机房。
应急情况下,也可以在舵机房手动直接操纵。
操纵系统按其机能不同,有自动操舵系统、随动操舵系统、单动操舵系统之分;按操纵动力不同,有液压操纵系统、电力操纵系统、电液操纵系统、机械式操纵系统等几种。
操纵系统应能满足操作方便、动作灵敏准确、工作可靠、生命力强等要求。