第六章 时域测量
- 格式:doc
- 大小:418.50 KB
- 文档页数:4

第六章时域测量(示波器)6.1 通用示波器由哪些主要电路单元组成?它们各起什么作用?它们之间有什么联系?6.2 通用示波器垂直偏转通道包括哪些主要电路?它们的主要作用是什么?它们的主要工作特性是什么?6.3 简述通用示波器扫描发生器环的各个组成部分及其作用?6.4 在示波器的水平和垂直偏转板上都加正弦信号所显示的图形叫李沙育图形。
如果都加上同频、同相、等幅的正弦信号,请逐点画出屏幕上应显示图形;如果两个相位差为90°的正弦波,用同样方法画出显示的图形。
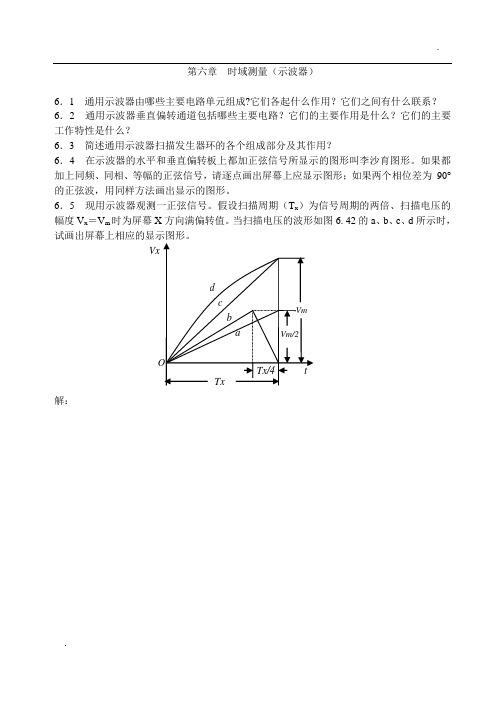
6.5 现用示波器观测一正弦信号。
假设扫描周期(T x)为信号周期的两倍、扫描电压的幅度V x=V m时为屏幕X方向满偏转值。
当扫描电压的波形如图6.42的a、b、c、d所示时,解:a bc dVx6.6 试比较触发扫描和连续扫描的特点。
6.7 一示波器的荧光屏的水平长度为10cm ,现要求在上面最多显示10MHz 正弦信号两个周期(幅度适当),问该示波器的扫描速度应该为多少?解:正弦信号频率为10MHz ,T =s f T 76101101011-⨯=⨯==,要在屏幕上显示两个周期,则显示的时间为s 71022T t -⨯==,扫描速度为s cm /10501021067⨯=⨯-6.8 示波器观测周期为 8ms ,宽度为 1ms ,上升时间为 0.5ms 的矩形正脉冲。
试问用示波器分别测量该脉冲的周期、脉宽和上升时间,时基开关( t/cm )应在什么位置(示波器时间因数为 0.05μs ~0.5s ,按 1-2-5 顺序控制)。
解:在示波器屏幕上尽量显示一个完整周期,而水平方向为10cm ,所以测量周期时,8ms/10cm =0.8ms/cm ,时基开关应在1ms 位置,测量脉宽时,1ms/10cm =0.1ms/sm ,时基开关应在100μs 位置,测量上升时间时,0.5ms/10cm =50μs/cm 时基开关应在50μs 位置6.9 什么是非实时取样?取样示波器由哪些部分组成?各组成部分有何作用?说明取样示波器观察重复周期信号的过程。


时域测量与频域测量测量被测物件在不同时间的特性,即把它看成是一个时间的函数f(t)来测量,称为时域测量。
例如,对图中a的信号f(t)可以用示波器显示并测量它的幅度、宽度、上升和下降时间等参数。
把信号f(t)输入一个网络,测量出其输出信号f(t),与输入相比较而求得网络的传递函数h(t)。
这些都属於时域测量。
对同一个被测物件,也可以测量它在不同频率时的特性,亦即把它看成是一个频率的函数S(ω)来测量,这称为频域测量。
例如,对信号f(t)可以用频谱分析仪显示并测量它在不同频率的功率分布谱S(ω),如图b。
把这个信号输入一个网络,测量出其输出频谱S′(ω),与输入相比较而求得网络的频率回应G(ω)。
这些都属於频域测量。
用一个频率可变的正弦(单频)信号作输入,测量出在不同频率时网络输出与输入功率之比,也得到G(ω)。
这仍然是频域测量。
时域与频域过程或回应,在数学上彼此是一对相互的傅里叶变换关系,这里*表示卷积。
时域测量与频域测量互相之间有唯一的对应关系。
在这一个域进行测量,通过换算可求得另一个域的结果。
在实际测量中,两种方法各有其适用范围和相应的测量仪器。
示波器是时域测量常用的仪器,便於测量信号波形参数、相位关系和时间关系等。
频谱分析仪是频域测量常用的仪器,便於测量频谱、谐波、失真、交调等。
1.最简单的解释频域就是频率域,平常我们用的是时域,是和时间有关的,这里只和频率有关,是时间域的倒数。
时域中,X轴是时间,频域中是频率。
频域分析就是分析它的频率特性!2. 图像处理中:空间域,频域,变换域,压缩域等概念!只是说要将图像变换到另一种域中,然後有利於进行处理和计算比如说:图像经过一定的变换(Fourier变换,离散yuxua DCT 变换),图像的频谱函数统计特性:图像的大部分能量集中在低,中频,高频部分的分量很弱,仅仅体现了图像的某些细节。
2.离散傅立叶变换一般有离散傅立叶变换和其逆变换3.DCT变换示波器用来看时域内容,频普仪用来看频域内容!!!时域是信号在时间轴随时间变化的总体概括。
第三章 信号发生器思考题与习题已知可变频率振荡器频率f 1=~,固定频率振荡器频率f 2=,若以f 1和f 2构成一差频式信号发生器,试求其频率覆盖系数,若直接以f 1构成一信号发生器,其频率覆盖系数又为多少 解:因为差频式信号发生器f 0= f 1-f 2所以输出频率范围为:400Hz ~频率覆盖系数301055000Hz400MHz0000.2⨯===k如果直接以f 1构成一信号发生器,则其频率覆盖系数8.1.4996MHz2MHz5000.40≈='k、要求某高频信号发生器的输出频率f =8~60MHz ,已知其可变电容器的电容C 的变化范围为50pF~200pF ,请问该如何进行波段划分,且每个波段对应的电感应为多大解:2502002121minmax maxmin min max ===C CLC LC f f k ==ππ 而5.7Hz80MHz6==∑k ,n k k =∑ 443.3255.0875.08.1lg 5.7lg 9.0lg lg ≈====∑k k n由MHz 8pF2002121maxmin ==L LC f ππ=,所以H 979.10μ=L相邻波段的电感值满足:21k L L nn =-,所以可以计算得出 H 495.01μ=L H 124.02μ=L H 031.01μ=LXFG-7高频信号发生器的频率范围为f=100kHz~30MHz ,试问应划分几个波段(为答案一致,设k=) 解:而30000KHz10MHz3==∑k ,n k k =∑(84.7334.0477.24.29.0lg 300lg 9.0lg lg ≈==⨯==∑k k n简述直接数字频率合成原理,试设计一个利用微处理器产生任意波形发生器的方案,并讨论如何提高任意波形的频率答:在存储器里存储任意波形的数字量,通过微处理器以一定的时间间隔读取数据,并送D/A 转换器进行转换,并将电压信号送滤波器进行滤波,一直以相同的转换时间间隔取下一个数进行转换,这样就可得到任意波形发生器。
矢量网络分析仪使用说明书第一章前言1. E836B网络分析仪具有以下技术特点:①高性能测量接收机E8362A网络分析仪采用基于混频器的实现方式,使该仪表具有当今微波网络分析仪中最高的测量灵敏度度。
测量频率范围:10M~20GHz;接收机数量:4台接收机测量灵敏度:-120dBm接收机测量参数;幅度和相位。
迹线噪声:0.005dB(在中频带宽为10KHz时)②完整的测量能力该网络分析可以工作在以下测量状态:频域扫描状态:测量激励信号为功率固定,频率变化信号。
考察被测在不同频率激励状态下等离子参数的变化;功率扫描状态:测量激励信号为频率固定,功率扫描变化信号。
考察被测在不同功率激励状态下参数的变化;连续波状态:测量激励信号为频率固定,功率固定信号。
考察被测等离子在固定激励状态下,响应状态参数的波动变化,E8362A最大测量时间长度可达到3000秒;时间域测量状态:通过将被测的频率响应通过IFFT变化到时间域得到其时域冲击响应,考察被测等离子响应信号的空中分布特性。
E8362AIFFT运算点数为160001点,可保证时域测量的分辨率和测量时间宽度。
③强大的分析能力E8362A基于PC的window2000操作平台,可内置各种分析软件,不需要外置PC 进行数据处理,编程方式为COM/DCOM,保证测试的速度。
仪表内置嵌入、去嵌入及端口延伸等功能,可直接消除测量天线对测量结果的影响,或进行其它补偿运算处理。
④高测量速度E8262A高性能接收机可确保高测量精度的同时具有快测量速度,具体指标为:35us/测量点,14ms/刷新(400点)。
保证对被测等离子的瞬态响应进行捕捉分析。
⑤多测试状态同时完成E8262A可支持16个测试通道,各通道可工作在不同的测量状态。
利用该功能,可以综合不同分析方法从不同角度来对一个现象进行研究。
⑥良好的可扩展性E8263A采用开放的发射/接收组成框架,用户可以根据测量的具体要求改变仪表的测量连接状态,还可以把需要的外部信号处理过程组合到仪表内部,例如:当被测需要更大激励功率时,可将推动方法器连接到仪表相应端口,该放大器引起的测试误差可以通过仪表的校准过程消除。
第一章 概论1、电子测量:宽频率范围(直流到光波)信号和系统的特性参数。
信号特性参数:信号的波形、频谱、电压、功率、频率、相位、周期、时间间隔……系统特性参数:系统的瞬态响应、传递函数、电阻、电容、电感、电抗、导纳、Q 值、介电常数、导磁率、驻波比、反射系数、散射参数、衰减、群延迟……2、测量的基本要素:被测对象、测量仪器、测量技术、测量人员、测量环境3、频域测量、时域测量、调制域测量 频域测量:以被测信号和系统在频率领域的特性为依据,研究的是被测对象的复数频率特性(包括幅频特性和相频特性),即信号的频谱和系统传递函数。
—稳态测量、加正弦测量 时域测量:以被测信号和系统在时间领域的特性为依据,研究的是被测对象的幅度-时间特性,即信号波形和系统的单位阶跃响应或单位冲激响应。
—瞬态测量、加脉冲测量调制域测量:研究的是被测对象的频率(时间间隔)-时间特性,连续测量被测信号的瞬时频率(时间间隔)。
4、信号≠波形:信号——被测对象的实际过程,客观存在波形——信号的表现形式,主观对客观的反映5、线性系统特点:(线性时不变系统还满足时不变特性)1)系统的模型方程具有线性属性(满足迭加原理)2)组成系统的元器件及电磁介质的参数值与独立变量无关 3)用n 阶常系数线性微分方程组描述激励与响应 4)满足卷积方程5)对微分方程进行傅立叶变换、拉普拉斯变换——可得到系统的传递函数☐ 系统输入扫频正弦信号,测量对应输出信号的幅值和相位——可得系统的频率特性 ☐ 系统输入单位脉冲信号——可得到时域脉冲响应函数 ☐ 频率为ω0的正弦波: 线性系统:正弦输入——正弦输出☐ 理想线性系统(无失真传输系统)——具有恒定的幅度和线性相位 y(t)=ax(t-t 0) 6、线性系统瞬态特性估计波形和测量系统中存在噪声——只能得到信号和系统的估计 线性系统瞬态响应估计——确定阶跃响应SR 和脉冲响应IR 单位脉冲信号和单位阶跃信号系统的输入x(t)为单位脉冲信号)(t δ时,此时系统输出响应就是脉冲响应(又称冲激响应) 当系统的输入x(t)为单位阶跃信号u(t)时,此时系统的输出响应称为阶跃响应 脉冲响应的积分为阶跃响应,反过来阶跃响应的微分就是脉冲响应7、直接获取系统瞬态响应的方法要求信号源、示波器、积分器、微分器及电缆、接头等都是理想的000()()()()()X Y H ωδωωωωδωω=-=-0()()j t Y ae X ωωω-=2)示波器输出的响应是系统各组成部分响应的合成结果——带来误差3)当系统各单元的响应时间远远小于(<<0.01)被测系统的响应时间时,误差一般<1% ——工程上视为理想的4)否则,误差增大:利用反卷积方法可以得到更准确的结果9、反卷积确定系统冲激响应的两种方法第二章 脉冲波形参数2、底量值、顶量值测定方法:密度分布平均数法;密度分布众数法;峰值法—适于窄脉冲3、RC 电路:过渡持续时间:系统带宽与过渡持续时间的关系: ω0为半功率点处的角频率,即3dB带宽4、高斯系统参数估计:1)高斯系统是物理上不可实现的系统,具有非因果的阶跃响应与脉冲响应 2)高斯函数具有一些人们期望的数学特性,对估计信号参数有用3)高斯系统时域与频域关系: 2.2 2.2D T RC τ==0002.2 2.20.352.22D T f f τωπ====0.34Df T=4)n 级高斯系统:方和根准则 (RSS 准则)5、示波器总的上升时间T 总上升时间=(T 12+T 22+…+T N 2)1/2 F 3dB =0.35/ T 总上升时间6、 非高斯系统参数估计1)当系统不是高斯系统时,RSS 准则的精度与脉冲特性偏离高斯分布的程度有关 2)当 T F > > T S 或波形的过冲和圆弧较小时,工程上认为RSS 准则仍然是的精确的第三章 快速变换与卷积(阅读PPT 为主)1、N 点的DFT 计算量:N 2次复数乘法X ,N (N-1)次复数加法+2、FFT(A )时间抽取计算量:共需(N/2)log 2N 次乘,Nlog 2N 次加,共N/2个蝶形 DIT :按在时域上输入序列次序的奇偶来抽取(分解)基本原理:DFT 的计算量正比于N 2,N 小,计算量也就小将大点数DFT 分解成若干小点数DFT 组合,减少运算 按时间序列奇偶抽取特点:原位计算、正序输出,倒序输入(码位倒序)、蝶形类型随迭代次数成倍增加 (B )频率抽取:基本原理:DFT 的计算量正比于N 2,N 小,计算量也就小将大点数DFT 分解成若干小点数DFT 组合,减少运算 时间序列对半分特点:共有M=log 2N 级运算,N/2个蝶形运算;正序输入,倒序输出;原位运算;蝶形类型随迭代次数成倍减少3、实输入序列FFT :同时计算两个实序列的FFT 算法;用N 点变换计算2N 个样本点的变换 采用DFT 或FFT ,作了如下处理:用离散采样信号的傅立叶变换来代替连续信号的频谱; 用有限长序列来代替无限长离散采样信号,所以DFT 或FFT 得到的是傅立叶变换的一种逼近形式。
第六章时域测量(示波器)
6.5 现用示波器观测一正弦信号。
假设扫描周期(T x)为信号周期的两倍、扫描电压的幅度V x=V m时为屏幕X方向满偏转值。
当扫描电压的波形如图6.42的a、b、c、d所示时,试画出屏幕上相应的显示图形。
解:
a b
c d
Vx
6.7 一示波器的荧光屏的水平长度为10cm ,现要求在上面最多显示10MHz 正弦信号两个周期(幅度适当),问该示波器的扫描速度应该为多少? 解:正弦信号频率为10MHz ,T =s f T 7
6
10
110
1011-⨯=⨯=
=
,要在屏幕上显示两个周
期,则显示的时间为s 71022T t -⨯==,扫描速度为
s cm /105010
2106
7
⨯=⨯-
6.8 示波器观测周期为 8ms ,宽度为 1ms ,上升时间为 0.5ms 的矩形正脉冲。
试问用示波器分别测量该脉冲的周期、脉宽和上升时间,时基开关( t/cm )应在什么位置(示波器时间因数为 0.05μs ~0.5s ,按 1-2-5 顺序控制)。
解:
在示波器屏幕上尽量显示一个完整周期,而水平方向为10cm ,所以 测量周期时,8ms/10cm =0.8ms/cm ,时基开关应在1ms 位置, 测量脉宽时,1ms/10cm =0.1ms/sm ,时基开关应在100μs 位置, 测量上升时间时,0.5ms/10cm =50μs/cm 时基开关应在50μs 位置
6.9 什么是非实时取样?取样示波器由哪些部分组成?各组成部分有何作用?说明取样示波器观察重复周期信号的过程。
解:由r t BW /35.0=,可知MHz BW 7)10
50/(35.09
=⨯=-,选择示波器时,信号上升
时间应大于3~5 t R (示波器上升时间),或者带宽大于3~5f M ,这样只有(2)和(4)满足,而(4)的上升时间最小,观察效果最好,但价格贵。
6.12数字存储示波器,设水平分辨力N =100点/Div ,当扫描速度为5μs/Div ;5ms/Div ;5s/Div ;时,其对应的采样频率为多少?有何启示? 解:因为水平分辨力N =fs ×t/div ,
所以扫描速度为5μs/Div 时:采样频率MHz t
N f s 2010
51006
=⨯=
=-
扫描速度为5ms/Div 时:采样频率KHz t N f s 20105100
3
=⨯=
=
- 扫描速度为5s/Div 时:采样频率Hz t N f s 205100
=⨯
==
6.13 有A ,B 两台数字示波器,最高采样率均为200Ms/s ,但存储深度A 为1K ,B 为1M ,问当扫速从10ns/div 变到1000ms/div 时,试计算其采样率相应变化的情况,并仿照教材图
6.XX 形式用曲线表示出来。
这给选用DSO 有何启示? 解:根据DSO 扫速、采样速率和记录长度的关系:
)(10)/()/()(div div S S s MS f pts L s ⨯⨯≥ 保持不变)(10
)()/()/(pts L div S S s MS f s ≤
⨯
A :
div s div
s div s MS f pts L div S S s /5.010/102001000
)
(10)/()()/(6
μ=⨯⨯=
⨯=
对应P1点
当扫速为1ms/div 时,相应的采样速率 s KS div
s div div S S pts L s MS f s /10010/10
11000)
(10)/()()/(3
=⨯⨯=
⨯=
- 对应P2点
B :div ms div
s div s MS f pts L div S S s /5.010/1020010
)
(10)/()()/(6
6
=⨯⨯=
⨯= 对应P3点
当扫速为1000ms/div 时,相应的采样速率 s KS div
s div div S S pts L s MS f s /10010/10
100010
)
(10)/()()/(3
6
=⨯⨯=
⨯=
- 对应P4点
结论:在选用DSO时,对相同最高采样率的DSO,应该选用记录长度较大的,这样扫速在较大范围变化时,采样速度不必跟着变化。