现代控制理论 东北大学高立群 清华大学出版社 第3章
- 格式:doc
- 大小:540.00 KB
- 文档页数:16
现代控制理论(浓缩版)绪论1.经典控制理论与现代控制理论的比较。
经典控制理论也称为古典控制理论,多半是用来解决单输入-单输出的问题,所涉及的系统大多是线性定常系统,非线性系统中的相平面法也只含两个变量。
经典控制理论是以传递函数为基础、在频率域对单输入单输出控制系统进行分析和设计的理论。
它明显具有依靠手工进行分析和综合的特点,这个特点是与20世纪40~50年代生产发展的状况,以及电子计算机的发展水平尚处于初级阶段密切相关的。
在对精度要求不高的场合是完全可用的。
最大成果之一就是PID 控制规律的产生,PID 控制原理简单,易于实现,具有一定的自适应性与鲁棒性,对于无时间延时的单回路控制系统很有效,在工业过程控制中仍被广泛采用。
现代控制理论主要用来解决多输入多输出系统的问题,系统可以是线性或非线性的、定常或时变的。
确认了控制系统的状态方程描述法的实用性,是与状态方程有关的控制理论。
现代控制理论基于时域内的状态空间分析法,着重实现系统最优控制的研究。
从数学角度而言,是把系统描述为四个具有适当阶次的矩阵,从而将控制系统的一些问题转化为数学问题,尤其是线性代数问题。
而且,现代控制理论是以庞得亚金的极大值原理、别尔曼的动态规划和卡尔曼的滤波理论为其发展里程碑,揭示了一些极为深刻的理论结果。
面对现代控制理论的快速发展及成就,人们对这种理论应用于工业过程寄于乐期望。
但现代控制在工业实践中遇到的理论、经济和技术上的一些困难。
所以说,现代控制理论还存在许多问题,并不是“完整无缺”,这是事物存在矛盾的客观反应,并将推动现代控制理论向更深、更广方向发展。
如大系统理论和智能控制理论的出现,使控制理论发展到一个新阶段。
2.控制一个动态系统的几个基本步骤有四个基本步骤:建模,基于物理规律建立数学模型;系统辨识,基于输入输出实测数据建立数学模型;信号处理,用滤波、预报、状态估计等方法处理输出;综合控制输入,用各种控制规律综合输入。

第一和第二讲小结一、状态空间表达式的标准形式能控标准形能观测标准形对角线标准形Jordan标准形二、矩阵的特征值及对角线化矩阵是能控标准形时的变换矩阵求法(1)特征值互异(2)重根(3)一般情形三、利用MATLAB进行系统模型之间的相互转换[A, B, C, D] = tf2ss (num, den)[num,den] = ss2tf [A,B,C,D,iu]四、时域分析的基本概念状态转移矩阵及其性质,凯莱-哈密尔顿定理最小多项式五、矩阵指数计算级数法,对角线标准形与Jordan标准形法拉氏变换法凯莱-哈密尔顿定理II、分析部分第三章线性多变量系统的能控性与能观测性分析能控性(controllability)和能观测性(observability)深刻地揭示了系统的内部结构关系,由R.E.Kalman于60年代初首先提出并研究的这两个重要概念,在现代控制理论的研究与实践中,具有极其重要的意义,事实上,能控性与能观测性通常决定了最优控制问题解的存在性。
例如,在极点配置问题中,状态反馈的的存在性将由系统的能控性决定;在观测器设计和最优估计中,将涉及到系统的能观测性条件。
在本章中,我们的讨论将限于线性系统。
将首先给出能控性与能观测性的定义,然后推导出判别系统能控和能观测性的若干判据。
3.1 线性连续系统的能控性3.1.1 概述能控性和能观测性就是研究系统这个“黑箱”的内部的状态是否可由输入影响和是否可由输出反映。
例1. 给定系统的描述为u x x xx⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡2150042121 []⎥⎦⎤⎢⎣⎡-=2160x x y将其表为标量方程组的形式,有:u x x+=114 u x x2522+-= 26x y -=例3-2:判断下列电路的能控和能观测性)(t u +yCR )(t uR L y23.1.2 能控性的定义考虑线性时变系统的状态方程∑:Bu x t A x+=)( , u t D x t C t y )()()(+=,00)(x t x =,J t ∈ (3.1.1)其中,x 为n 维状态向量,u 维p 维输入向量,J 为时间定义区间,B A ,分别为n n ⨯和p n ⨯的元为t 的连续函数的矩阵。
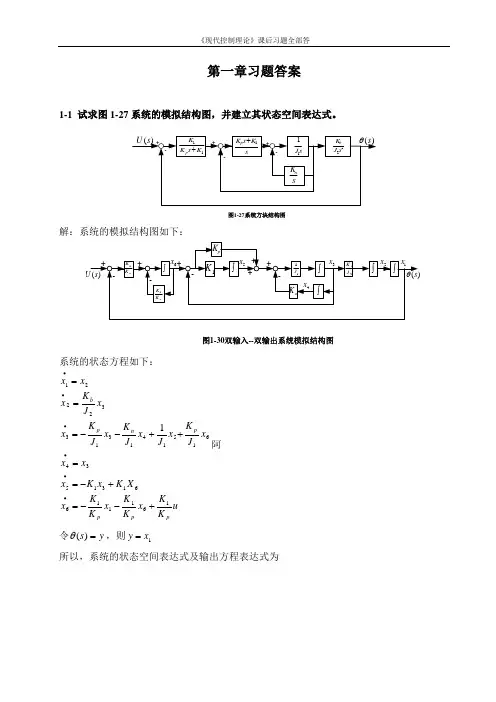
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
非线性动态系统的稳定性和鲁棒控制理论研究上世纪50年代,Kallman成功的将状态空间法引入到系统控制理论中,从而标志着现代控制理论研究的开始。
现代控制理论的研究对象是系统的数学模型,它根据人们对系统的性能要求,通过对被控对象进行模型分析来设计系统的控制律,从而保证闭环系统具有期望的性能。
其中,线性系统理论已经形成一套完整的理论体系。
过去人们常用线性系统理论来处理很多工程问题,并在一定范围内取得了比较满意的效果。
然而,这种处理方法是以忽略系统中的动态非线性因素为代价的。
实际中很多物理系统都具有固有的动态非线性特性,如库仑摩擦、饱和、死区、滞环等,这些非线性动态非线性特性的存在常常使系统的控制性能下降,甚至变得不稳定。
这就使得利用线性系统理论处理非线性动态系统面临巨大的困难。
此外,在控制系统运行过程中,环境的变化或者元件的老化,以及外界干扰等不确定因素也会造成系统实际参数和标称值之间出现较大差别。
因此,基于标称数学模型所设计的控制律一般很难达到期望的性能指标,甚至会使系统不稳定。
综上所述,研究不确定条件下非线性动态系统的鲁棒稳定性及鲁棒控制间题具有重要的理论意义和迫切的实际需要。
非线性动态系统是指按确定性规律随时间演化的系统,又称动力学系统,其理论来源于经典力学,一般由微分方程来描述。
美国数学家Birkhoff[1]发展了法国数学家Poincare在天体力学和微分方程定性理论方面的研究,奠定了动态系统理论的基础。
在实际动态系统中,对象往往受到各种各样的不确定的影响,所以其数学模型一般不可能精确得到。
因此,我们只能用近似的标称数学模型来描述被控对象,并据此来设计控制系统,动态系统鲁棒控制由此产生。
所谓鲁棒性就是指系统预期非线性动态系统的稳定性和鲁棒控制理论研究的设计品质不因不确定性的存在而遭到破坏的特性,鲁棒控制是非线性动态系统控制理论研究的一个非常重要的分支。
现代控制理论的发展促进了对动态系统的研究,使它的应用从经典力学扩大到一般意义下的系统。
现代控制理论B(Modern Control Theory)课程代码:05410129学分:2学时:32 (其中:课题教学学时:32 实验学时:0 上机学时:0 课程实践学时:0 )先修课程:自动控制理论、高等数学、线性代数适用专业:自动化教材:现代控制理论(于长官主编、哈尔滨工业大学出版社、第3版,2008,11)一、课程性质与课程目标(一)课程性质(需说明课程对人才培养方面的贡献)《现代控制理论》是自动化专业的一门专业基础课。
它系统介绍基于状态空间描述的控制系统的分析与综合方法。
通过本课程的学习,使学生初步掌握现代控制理论的基本知识及其分析方法,对控制理论有更全面的了解,为后续专业课和毕业设计打好理论基础。
(二)课程目标《现代控制理论》课程主要以控制工程中常见的典型线性连续与离散控制系统为对象,研究建立系统状态空间模型的方法、系统的能控性与能观性判别、系统稳定性分析、系统综合的方法。
课程的具体目标如下:知识目标1.1:了解现代控制理论的体系结构;知识目标1.2:熟练掌握线性控制系统的状态空间描述;知识目标1.3:掌握线性控制时域运动分析与离散化;知识目标1.4:掌握利用状态空间模型分析系统能控性、能观性和稳定性;知识目标1.5:掌握线性定常系统的综合。
能力目标2.1:能够熟练进行系统极点配置的控制器设计,并画出系统结构图。
能力目标2.2:能够熟练进行系统状态观测器的算法设计,并画出系统结构图。
能力目标2.3:逐步培养学生的逻辑思维能力、判断和分析能力。
毕业要求指标点6-3.:能正确认识和评价自动化工程解决方案及新产品、新技术、新工艺、新材料的开发和应用对于客观世界和社会的影响,并理解应承担的责任。
毕业要求指标点7-2:能正确评价复杂自动化工程问题实践对于环境、社会可持续发展的影响。
毕业要求指标点10-3:能够比较熟练地阅读自动化专业的外文书刊资料,能够在跨文化背景下进行沟通、交流和合作。
课程目标毕业要求指标点课程目标1.1课程目标1.2课程目标1.3课程目标1.4课程目标1.5课程目标2.1课程目标2.2课程目标2.36-3 √√√√√√√√7-2 √√√√10-3 √√√√√√√二、课程内容与教学要求第一章绪论(一)课程内容1.本课程的性质、研究对象与方法、目的、任务。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 教学内容与目标第二章:线性控制系统的基本理论2.1 数学基础2.1.1 向量与矩阵2.1.2 复数与复矩阵2.1.3 拉普拉斯变换与Z变换2.2 线性微分方程2.3 线性差分方程2.4 线性系统的状态空间描述2.5 线性系统的传递函数2.6 小结第三章:线性控制系统的稳定性分析3.1 系统稳定性的概念3.2 劳斯-赫尔维茨稳定性判据3.3 奈奎斯特稳定性判据3.4 李雅普诺夫稳定性理论3.5 小结第四章:线性控制系统的性能分析与设计4.1 性能指标4.1.1 稳态性能4.1.2 动态性能4.2 控制器设计方法4.2.1 比例积分微分(PID)控制器4.2.2 状态反馈控制器4.2.3 观测器设计4.3 小结第五章:非线性控制系统理论5.1 非线性系统的基本概念5.2 非线性方程与非线性微分方程5.3 非线性系统的状态空间描述5.4 非线性系统的稳定性分析5.5 小结第六章:非线性控制系统的性能分析与设计6.1 非线性性能指标6.2 非线性控制器设计方法6.2.1 反馈线性化方法6.2.2 滑模控制方法6.2.3 神经网络控制方法6.3 小结第七章:鲁棒控制理论7.1 鲁棒控制的概念与意义7.2 鲁棒控制的设计方法7.2.1 定义1-范数方法7.2.2 H∞控制方法7.2.3 μ-综合方法7.3 小结第八章:自适应控制理论8.1 自适应控制的概念与意义8.2 自适应控制的设计方法8.2.1 模型参考自适应控制8.2.2 适应律与自适应律8.2.3 自适应控制器的设计步骤8.3 小结第九章:现代控制理论在工程应用中的案例分析9.1 工业过程控制中的应用9.2 控制中的应用9.3 航空航天领域的应用9.4 小结第十章:总结与展望10.1 现代控制理论的主要成果与贡献10.2 现代控制理论的发展趋势10.3 面向未来的控制挑战与机遇10.4 小结重点和难点解析重点环节一:第二章中向量与矩阵、复数与复矩阵、拉普拉斯变换与Z变换的数学基础。
第3章 “状态方程的解”习题解答3.1计算下列矩阵的矩阵指数te A 。
200200(1)020;(2)031002003--⎡⎤⎡⎤⎢⎥⎢⎥=-=-⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦A A0001(3) ; (4) 1040-⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦A A(1)解 222000000tt t t e e e e ---⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦A (2)解 233300000tt t t t e e e te e ----⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦A (3)解()122011001111s s s s s s s s s s -⎡⎤-=⎢⎥-⎣⎦⎡⎤⎢⎥⎡⎤-==⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦I A I A ()()()11101t t e L s t t --⎡⎤⎡⎤=-=⎢⎥⎣⎦⎣⎦A I A (4)解: 14s s s ⎡⎤-=⎢⎥-⎣⎦I A()1222221144124242244s s s s ss s s s s --⎡⎤-=⎢⎥+⎣⎦⎡⎤-⋅⎢⎥++=⎢⎥⎢⎥⎢⎥++⎣⎦I A 221221242422441cos 2sin 222sin 2cos 2ts s s e L s s s t t tt -⎡⎤-⎢⎥++=⎢⎥⎢⎥⎢⎥++⎣⎦⎡⎤-⎢⎥=⎢⎥⎣⎦A3.2 已知系统状态方程和初始条件为()1001010,000121⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦x x x(1) 试用拉氏变换法求其状态转移矩阵; (2) 试用化对角标准形法求其状态转移矩阵; (3) 试用化te A 为有限项法求其状态转移矩阵; (4) 根据所给初始条件,求齐次状态方程的解。
(1)解 12100010012O O ⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦A A A , 其中, 12101,12⎡⎤==⎢⎥⎣⎦A A则有 1200ttt e ee ⎡⎤=⎢⎥⎣⎦A A A 而 1tt ee =A , ()2112t e L s --⎡⎤=-⎣⎦A I A()112101220111(1)(2)101111212s s s s s s s s s s s ---⎡⎤-=⎢⎥--⎣⎦-⎡⎤=⎢⎥---⎣⎦⎡⎤⎢⎥-=⎢⎥⎢⎥-⎢⎥---⎣⎦I A()2112220ttt tt e eL s e e e --⎡⎤⎡⎤=-=⎢⎥⎣⎦-⎣⎦A I A 所以状态转移矩阵为()112200000tt t t tt e e L s e e e e --⎡⎤⎢⎥⎡⎤=-=⎢⎥⎣⎦⎢⎥-⎣⎦A I A (2)解 21(1)(2)012I λλλλλ--==--=--A121,2λλ==对于11λ=,100011101⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦1P P 对于22λ=,2210001001⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦P P110101111-⎡⎤⎡⎤=⇒=⎢⎥⎢⎥-⎣⎦⎣⎦P P2122220010100111100t tt t t tt t t e ee e e e e ee -⎡⎤=⎢⎥⎣⎦⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤=⎢⎥-⎣⎦A P P2200000t t t t tt e e e e e e ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦P (3)解 矩阵的特征值为1,21λ=, 32λ=对于32λ=有: 2012()2()4()te t t t ααα=++对于1,21λ=有: 012()()()te t t t ααα=++因为是二重特征值,故需补充方程 12()2()tte t t αα=+ 从而联立求解,得:202122()2()322()t tt t t t t tt e te t te e e t e e te ααα=-=-+=--()()20122222222()()()20100020322010002012100100 0100100120120000 0t t t t t t t t t t t t t tt t tt e t t t e te e te te e e e te e e te e e e e e ααα=++⎡⎤-⎡⎤⎢⎥⎢⎥=-+-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤⎡⎤⎢⎥⎢⎥+--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦A I A A(4)解:0)0222()()(0)001000001t t t t t t t tt t t e t e e e e e e e e -==⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦A(A x x x3.3 矩阵A 是22⨯的常数矩阵,关于系统的状态方程式= xAx ,有 1(0)1⎡⎤=⎢⎥-⎣⎦x 时, 22t t e e --⎡⎤=⎢⎥-⎣⎦x2(0)1⎡⎤=⎢⎥-⎣⎦x 时, 2t t e e --⎡⎤=⎢⎥-⎣⎦x试确定这个系统的状态转移矩阵(,0)t Φ和矩阵A 。
GDOU-B-11-213《现代控制理论》教学大纲课程简介教学内容本课程主要内容有:系统状态空间表达式的建立;状态方程的求解;系统的能控性和能观性,包括系统能控性和能观性的判别,能控标准型与能观标准型,线性系统的结构分解,传递函数矩阵的实现;李亚普诺夫方法原理及用李亚普诺夫方法分析线性定常、线性时变及非线性系统;控制系统的综合,包括反馈的各种类型,用状态反馈进行极点配置,用状态观测器实现状态反馈等。
修读专业:自动化专业先修课程:线性代数、矩阵论、经典控制理论教材:王孝武,《现代控制理论基础》,机械工业出版社,1998。
一、课程的性质与任务本课程是在经典控制论基础上学习现代控制理论的基本概念、基本理论和分析方法。
现代控制理论基础以状态空间分析法为核心,涵盖了非线性控制系统分析、动态系统最优控制方法。
通过本课程的学习,使学生能够初步掌握现代控制理论的基本知识及其分析方法,并将其应用于实际控制系统的分析与综合,提高学生的系统分析和综合能力。
二、课程的基本要求通过本课程的学习,学生应该掌握有关运用状态空间分析法定量和定性分析及综合控制系统的基本理论、基本方法,为学习后续课程打下基础。
三、修读专业电气工程及其自动化、自动化四、本课程与其它课程的联系本课程为自动化专业的专业课,是继经典控制理论---《自动控制原理》之后的又一门重要的控制理论课程。
其任务是在经典控制理论的基础上进一步加深、扩展和提高学生在控制理论方面的基础知识,使学生较为全面地了解和掌握控制理论的基本内容,为后继学习《最优控制》、《随机控制》、《系统辨识》等其它自控理论课程打好基础。
要求学生具备微分方程、线性代数、积分变换(特别是拉氏变换,z变换)等数学方面的有关知识。
五、教学内容安排、要求、学时分配及作业第一章控制系统的数学模型(10学时)1.状态空间表达式(A)2.由微分方程求状态空间表达式(B)3.传递函数矩阵(A)4.线性变换(B)5.组合系统的数学描述(C)6.作业一次第二章线性控制系统的运动分析(10学时)1.线性定常系统齐次状态方程的解(A)2.状态转移矩阵(A)3.线性定常系统非齐次状态方程的解(B)4.线性系统的脉冲响应矩阵(B)5.作业一次第三章控制系统的能控性和能观测性(14学时)1.能控性及其判据(A)2.能观测性及其判据(A)3.对偶原理(B)4.能控标准形和能观测标准形(A)5.能控性、能观测性与传递函数关系(B)6.系统的结构分解(A)7.实现问题(B)8.作业一次第四章控制系统的稳定性(8学时)1.稳定性的定义(B)李雅普诺夫稳定性定义、稳定、渐进稳定和不稳定的概念;(B)BIBO稳定性的概念(C)2.李雅普诺夫稳定性的基本定理(B)李雅普诺夫稳定性的基本定理(B)李雅普诺夫第二方法在线性定常系统中的应用(C)作业一次第五章线性定常系统的综合(12学时)1.状态反馈和输出反馈(B)2.反馈系统的能控性和能观测性(B)3.极点配置问题(A)4.镇定问题(A)5.状态重构和状态观测器(A)6.带有观测器的状态反馈系统(B)7.解耦问题(B)8.作业一次六、实验内容与要求七、教材与参考书本课程选用教材:王孝武,《现代控制理论基础》,机械工业出版社,1998本课程推荐参考书:1.胡寿松,《自动控制原理》,科学出版社。
第3章 “状态方程的解”习题解答3.1计算下列矩阵的矩阵指数te A 。
200200(1)020;(2)031002003--⎡⎤⎡⎤⎢⎥⎢⎥=-=-⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦A A0001(3) ; (4) 1040-⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦A A(1)解 222000000ttt t e ee e ---⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦A (2)解 233300000ttt t t e e e te e ----⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦A (3)解()122011001111s s s s s s s s s s -⎡⎤-=⎢⎥-⎣⎦⎡⎤⎢⎥⎡⎤-==⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦I A I A ()()()11101tt e L s t t --⎡⎤⎡⎤=-=⎢⎥⎣⎦⎣⎦A I A (4)解: 14s s s ⎡⎤-=⎢⎥-⎣⎦I A()1222221144124242244s s s s ss s s s s --⎡⎤-=⎢⎥+⎣⎦⎡⎤-⋅⎢⎥++=⎢⎥⎢⎥⎢⎥++⎣⎦I A 221221242422441cos 2sin 222sin 2cos 2t ss s e L s s s t t tt -⎡⎤-⎢⎥++=⎢⎥⎢⎥⎢⎥++⎣⎦⎡⎤-⎢⎥=⎢⎥⎣⎦A3.2 已知系统状态方程和初始条件为()1001010,000121⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦x x x(1) 试用拉氏变换法求其状态转移矩阵; (2) 试用化对角标准形法求其状态转移矩阵; (3) 试用化te A 为有限项法求其状态转移矩阵; (4) 根据所给初始条件,求齐次状态方程的解。
(1)解 12100010012O O ⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦A A A , 其中, 12101,12⎡⎤==⎢⎥⎣⎦A A 则有 1200tt t e e e ⎡⎤=⎢⎥⎣⎦A A A 而 1tt ee =A , ()2112t e L s --⎡⎤=-⎣⎦A I A()112101220111(1)(2)101111212s s s s s s s s s s s ---⎡⎤-=⎢⎥--⎣⎦-⎡⎤=⎢⎥---⎣⎦⎡⎤⎢⎥-=⎢⎥⎢⎥-⎢⎥---⎣⎦I A()2112220t tt tt e eL s e e e --⎡⎤⎡⎤=-=⎢⎥⎣⎦-⎣⎦A I A 所以状态转移矩阵为()112200000tt t t tt e e L s e e e e --⎡⎤⎢⎥⎡⎤=-=⎢⎥⎣⎦⎢⎥-⎣⎦A I A (2)解21(1)(2)012I λλλλλ--==--=--A 121,2λλ==对于11λ=,100011101⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦1P P对于22λ=,2210001001⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦P P110101111-⎡⎤⎡⎤=⇒=⎢⎥⎢⎥-⎣⎦⎣⎦P P2122220010100111100t tt tt tt t t e ee e e e e ee -⎡⎤=⎢⎥⎣⎦⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤=⎢⎥-⎣⎦A P P2200000tt t t tt e e e e e e ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦P (3)解 矩阵的特征值为1,21λ=,32λ=对于32λ=有: 2012()2()4()t e t t t ααα=++ 对于1,21λ=有: 012()()()t e t t t ααα=++ 因为是二重特征值,故需补充方程 12()2()t te t t αα=+ 从而联立求解,得:202122()2()322()t tt t t t t tt e te t te e e t e e te ααα=-=-+=-- ()()20122222222()()()20100020322010002012100100 0100100120120000 0t t t t t t t t t t t t t t t t t t e t t t e te e te te e e e te e e te e e e e e ααα=++⎡⎤-⎡⎤⎢⎥⎢⎥=-+-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤⎡⎤⎢⎥⎢⎥+--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦A I A A(4)解:0)0222()()(0)001000001t t t t t t t tt t t e t e e e e e e e e -==⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦A(A x x x3.3 矩阵A 是22⨯的常数矩阵,关于系统的状态方程式= xAx ,有 1(0)1⎡⎤=⎢⎥-⎣⎦x 时, 22t t e e --⎡⎤=⎢⎥-⎣⎦x2(0)1⎡⎤=⎢⎥-⎣⎦x 时, 2t t e e --⎡⎤=⎢⎥-⎣⎦x试确定这个系统的状态转移矩阵(,0)t Φ和矩阵A 。
解:因为系统的零输入响应是()(,0)(0)t t =x x Φ所以221(,0)1t t e t e --⎡⎤⎡⎤=⎢⎥⎢⎥--⎣⎦⎣⎦Φ,22(,0)1t t e t e --⎡⎤⎡⎤=⎢⎥⎢⎥--⎣⎦⎣⎦Φ将它们综合起来,得22122(,0)11tt t t e e t e e ----⎡⎤⎡⎤=⎢⎥⎢⎥---⎣⎦⎣⎦Φ 122222222122(,0)11122112222tt tt t t t t t t t t t t t t e e t ee e e ee e e e e e ee e -----------------⎡⎤⎡⎤=⎢⎥⎢⎥----⎣⎦⎣⎦--⎡⎤⎡⎤=⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤--=⎢⎥--⎣⎦Φ 而状态转移矩阵的性质可知,状态转移矩阵0(,)t t Φ满足微分方程()()00,,dt t t t dt=A ΦΦ 和初始条件 ()00,t t =I Φ因此代入初始时间00t =可得矩阵A 为:0100022220(,)(,)2224240213t t t t t t t t t t t d t t t t dt e e e e e e e e -==--------=⎧⎫=⎨⎬⎩⎭⎡⎤-+-+=⎢⎥-+-+⎣⎦⎡⎤=⎢⎥--⎣⎦A ΦΦ3.9 已知系统= xAx 的转移矩阵0(,)t t Φ是 2202222()(,)2t tt t t tt t e e e e t t e ee e --------⎡⎤--=⎢⎥--⎣⎦Φ 时,试确定矩阵A 。
解 因为 0(,)t t Φ是状态转移矩阵, 所以有 00(,)(,)d t t t t dt ⎧⎫=⎨⎬⎩⎭A -1ΦΦ 将00t =,00(,)t t I =Φ代入得:0213-⎡⎤=⎢⎥-⎣⎦A 3.10 已知系统状态空间表达式为011341u ⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦x x[]11y =x(1) 求系统的单位阶跃响应; (2) 求系统的脉冲响应。
(1)解 0134⎡⎤=⎢⎥-⎣⎦A ,[]1,111⎡⎤==⎢⎥⎣⎦B C1(4)3(3)(1)034λλλλλλλ--==-+=--=-I A121,3λλ⇒==11λ=时, 1111013301-⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦P P23λ=时, 2231013103-⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦P P 1113⎡⎤=⎢⎥⎣⎦P 131311221111222-⎡⎤-⎢⎥-⎡⎤==⎢⎥⎢⎥-⎣⎦⎢⎥-⎢⎥⎣⎦P 13333333111002213110223111222233132222ttt t t t tt t t t t t e e e e e e e e e e e e e -⎡⎤-⎢⎥⎡⎤⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎣⎦-⎢⎥⎣⎦⎡⎤--+⎢⎥=⎢⎥⎢⎥--+⎢⎥⎣⎦A P P将()1()u t t =代入求解公式得:3313323111(0)2222()(0)33132222t tt t t t t t e e e e x t x e e e e ⎡⎤--+⎢⎥⎡⎤=⎢⎥⎢⎥⎣⎦⎢⎥--+⎢⎥⎣⎦x +3()3()3()3()013112333tt t t t t t t t e e e e d e e e e τττττττττ--------⎡⎤--+⎡⎤⎢⎥⎢⎥--+⎣⎦⎣⎦⎰ 331233123(0)(0)122333(0)(0)122t t ttt ttt t t e e e e x x e e e e e x x e ⎡⎤---+-⎢⎥⎢⎥=--⎢⎥-+-⎢⎥⎣⎦若取(0)0=x ,则有 1()1t t e t e ⎡⎤-=⎢⎥-⎣⎦x[][]111()11221t t t e y t e e ⎡⎤-===-⎢⎥-⎣⎦x(2)解 由(1)知te =A 33333111222233132222t t t t t t t t e e e e e e e e ⎡⎤--+⎢⎥=⎢⎥⎢⎥--+⎢⎥⎣⎦取()(0)u t δ=,则有3313323()3()3()3()03312313111(0)2222()(0)33132222131(0)123333(0)(0)2233(0)2t tt t t t t t tt t t t t t t t t t ttt tte e e e x t x e e e e e e e e d e e e e e e e e x x e e e x ττττττττδτ--------⎡⎤--+⎢⎥⎡⎤=⎢⎥⎢⎥⎣⎦⎢⎥--+⎢⎥⎣⎦⎡⎤--+⎡⎤+⎢⎥⎢⎥--+⎣⎦⎣⎦---+=--⎰x 323(0)2t t t e e x e ⎡⎤⎢⎥⎢⎥-⎢⎥+⎢⎥⎣⎦若取0(0)0⎡⎤=⎢⎥⎣⎦x ,则有()t t e t e ⎡⎤=⎢⎥⎣⎦x ,[]()112t t t e y t e e ⎡⎤==⎢⎥⎣⎦3.11 求下列系统在输入作用为:① 脉冲函数;② 单位阶跃函数;③ 单位斜坡函数下的状态响应。
(1) 1001a b a u b a b ⎡⎤⎢⎥-⎡⎤-=+⎢⎥⎢⎥-⎣⎦⎢⎥⎢⎥-⎣⎦x x(2) ()0101u ab a b ⎡⎤⎡⎤=+⎢⎥⎢⎥--+⎣⎦⎣⎦ xx (1)解0000at tbt a e e b e ---⎡⎤⎡⎤=⇒=⎢⎥⎢⎥-⎣⎦⎣⎦A A ① ()()u t t δ=,()()()()()1()0212100000101(0)1(0)ata t t btb t atat bt bt x e e b a t d x e e a b e x e b a e x e b a ττδτ----------⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤-=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥-⎣⎦⎡⎤+⎢⎥-=⎢⎥⎢⎥-⎢⎥-⎣⎦⎰x取()00=x ,则()11at bt e b a t e b a --⎡⎤⎢⎥-=⎢⎥⎢⎥-⎢⎥-⎣⎦x② ()()1u t t =,()()()()()1()021201101(0)()()1(0)()()at a t t bt b t at at bt bt e x e t d e x b a e e e x a b a a b a e e x b b a b b a ττττ----------⎡⎤⎡⎤=+⋅⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤+-⎢⎥--⎢⎥=⎢⎥+-⎢⎥--⎣⎦⎰x若取()00=x ,则有 ()1()()1()()at bt e a b a a b a t e b b a b b a --⎡⎤-⎢⎥--⎢⎥=⎢⎥-⎢⎥--⎣⎦x ③ ()u t t =, ()()1()20(0)1(0)tat a t bt b t e x e t td b a e x eτττ------⎡⎤⎡⎤=+⋅⎢⎥⎢⎥--⎣⎦⎣⎦⎰x()()()()()()()()()()221222122222101011010at at bt btat at bt bt t e e x a a a e x b a t e b b b t e e x a b a a b a a b a t e e x b b a b b a b b a --------⎡⎤+-⎢⎥⎡⎤⎢⎥=+⎢⎥-⎢⎥⎣⎦--+⎢⎥⎣⎦⎡⎤++-⎢⎥---⎢⎥=⎢⎥--+⎢⎥---⎢⎥⎣⎦若取()00=x ,则有()()()()()()()222211at bt t e a b a a b a a b a t t e b b a b b a b b a --⎡⎤+-⎢⎥---⎢⎥=⎢⎥--+⎢⎥---⎢⎥⎣⎦x (2)解()010,1ab a b ⎡⎤⎡⎤==⎢⎥⎢⎥--+⎣⎦⎣⎦A B ()()()()1ab a b a b ab a b λλλλλλλ--=++=+++=++=⎡⎤⎣⎦I A所以12,a b λλ=-=-1a λ=-时, 111010a abb a --⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦P P 2b λ=-时, 221010b aba b --⎡⎤⎡⎤⎡⎤=⇒=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦P P 11a b ⎡⎤=⎢⎥--⎣⎦P 1111b a b a ---⎡⎤=⎢⎥-+⎣⎦P1111001101atat t bt bt atbtat btat bt at bt b e e e a b a a b e e be ae eea b abe abe ae be ---------------⎡⎤⎡⎤⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤-+-+=⎢⎥---⎣⎦A P P① ()()u t t δ=,()12()()()()()()()()0(0)1(0)01(0)1()1at btat bt at bt at bt ta tb t a t b t a t b t a t b t bt at x be ae e e t x a b abe abe ae be be ae e e d a b abeabe ae be ae be x a b ττττττττδτ--------------------------⎡⎤-+-+⎡⎤=⎢⎥⎢⎥---⎣⎦⎣⎦⎡⎤-+-+⎡⎤+⎢⎥⎢⎥---⎣⎦⎣⎦-=-⎰x 1212(0)()(0)()(0)()(0)at bt at btat bt at bt at bt e e x e eabe abe x ae be x ae be ----------⎡⎤+-+-+⎢⎥-+-+-⎣⎦取(0)0=x , 则有1()at bt at bt e e t a b ae be ----⎡⎤-+=⎢⎥--⎣⎦x② ()()1u t t =,()()()12()()()()()()()()01010011()1()(0)1at btat bt at btat bt a t b t a t b t t a t b t a t b t bt at x be ae e e t x a b abe abe ae be be ae e e d a b abe abe ae be ae be x a b ττττττττττ--------------------------⎡⎤⎡⎤-+-+=⎢⎥⎢⎥---⎣⎦⎣⎦⎡⎤-+-+⎡⎤+⎢⎥⎢⎥---⎣⎦⎣⎦-=-⎰x 2121111()(0)()(0)()(0)at btat bt at bt at bt at bte e x e e b a a babe abe x ae be x e e ----------⎡⎤+-++-+-⎢⎥⎢⎥-+--+⎣⎦取(0)0=x , 则有 11111()at bt at bt e e t b a a ba be e ----⎡⎤-+-⎢⎥=⎢⎥--+⎣⎦x ③()u t t =,()()()()12()()()()()()()()01010011()0(1at btat bt at btat bt ta tb t a t b t a t b t a t b t at bt x be ae e e t x a b abe abe ae be be ae e e d a b abeabe ae be be ae x e a b ττττττττττ--------------------------⎡⎤⎡⎤-+-+=⎢⎥⎢⎥---⎣⎦⎣⎦⎡⎤-+-+⎡⎤+⎢⎥⎢⎥---⎣⎦⎣⎦-++-=-⎰x ()()()2221211)011()0()0at bt at btat bt at bt at btat e bt e e x a b at e bt e abe abe x ae be x a b ----------⎡⎤-+-++-+⎢⎥⎢⎥-+-+⎢⎥-+--+⎢⎥⎣⎦取(0)0=x , 则有 ()2211111at bt at bt at e bt e a b t a b at e bt e a b ----⎡⎤-+-+-+⎢⎥⎢⎥=--+-+⎢⎥-⎢⎥⎣⎦x 3.12 线性时变系统()()()t t t = xA x 的系数矩阵如下。