现代控制理论第3章
- 格式:ppt
- 大小:3.24 MB
- 文档页数:109
现代控制理论第3章传递函数矩阵的结构特性控制理论是现代科学技术的重要组成部分,它主要研究如何通过合理的方式对动力系统进行控制。
传递函数是控制理论中的一个重要概念,它是描述控制系统中输入和输出之间关系的数学模型。
在现代控制理论中,传递函数矩阵作为传递函数的扩展,是一种描述多输入多输出系统的数学模型,具有一些特殊的结构特性。
首先,传递函数矩阵的维度决定了系统的输入和输出的数量。
设系统的输入和输出分别为u和y,传递函数矩阵的维度为p×m,其中p是输出的数量,m是输入的数量。
这意味着系统的输出是由m个输入共同作用决定的,而系统的输出也会影响到m个输入。
传递函数矩阵的维度结构清晰明确,可以直观地反映系统的复杂性和耦合程度。
其次,传递函数矩阵可以通过分块矩阵的形式表示。
在传递函数矩阵中,每个元素都是一个标量传递函数,表示输入对应输出的单一影响。
将传递函数矩阵按照行和列的方式进行分块,可以更好地表示系统的结构和功能,方便进行系统分析和设计。
例如,可以将传递函数矩阵按照行进行分块,每个分块表示一个输出对所有输入的传递函数,即系统的局部传递函数。
这种分块的方式有助于分析系统的稳定性、可控性和可观性等性质。
第三,传递函数矩阵具有可乘性和可加性。
传递函数矩阵之间可以进行乘法和加法运算,得到的结果仍然是一个传递函数矩阵。
这使得系统的复杂行为可以通过简单的计算表达出来。
例如,两个传递函数矩阵相乘可以表示两个系统级联的结果,即一个系统的输出作为另一个系统的输入,从而形成一个新的系统。
传递函数矩阵的可乘性和可加性为系统分析和设计提供了便利。
最后,传递函数矩阵具有一些特殊结构,如分数阶传递函数矩阵和时滞传递函数矩阵等。
分数阶传递函数矩阵是一类常见的非整数阶动力系统的数学模型,广泛应用于控制系统、信号处理和通信系统等领域。
时滞传递函数矩阵描述的是系统的输入和输出之间存在一定的延迟,这在实际控制系统中是常见的现象。
对于这些特殊结构的传递函数矩阵,需要采用不同的方法进行分析和设计,以满足系统要求。
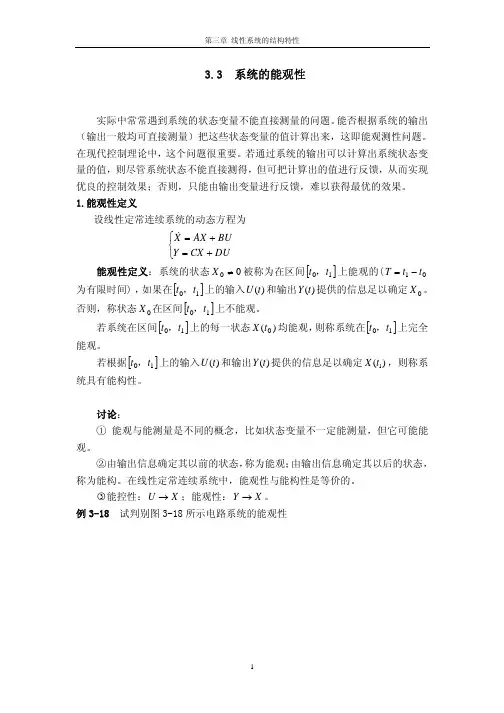


3-6已知系统的微分方程为:u y y y y 66116......=+++ 试写出其对偶系统的状态空间表达式及其传递函数。
解:63611603210=====b a a a a ,,,, 系统的状态空间表达式为[] x006y u 100x 6116100010 =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x &传递函数为[]6116610061161001006A)-C(sI )(2311-+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--==-s s s s s sB s W其对偶系统的状态空间表达式为:[] x10y u006x 6101101600=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x传递函数为61166)(23+--=s s s s W3-7已知能控系统的A,b 阵为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=11,4321b A 试将该状态方程变换为能控标准型。
解:该状态方程的能控性矩阵为[]⎥⎦⎤⎢⎣⎡-==7111Ab bM rankM=2,矩阵非奇异,系统能控。
系统特征多项式:105||2+-=-λλλA I可知a1=-5,a0=10。
所以⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡--=510101010a a A u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=10 51010·此即为该状态方程的能控标准形。
取P=T C -1该状态方程的能控性矩阵为[]⎥⎦⎤⎢⎣⎡-==7111Ab bM 知它是非奇异的。
求得逆矩阵有,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-818181871M由[][]111 10--=bAAb bP n 得[][]⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==-818181818187101011MP 同理,由A P P 12=得⎥⎦⎤⎢⎣⎡=43412P 从而得到P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=4341818121P P P ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-81418143811P由此可得,⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎦⎤⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==-51010641321641323 4321 434181811PAPA ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==1011 43418181Pb b所以,u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=10 51010·此即为该状态方程的能控标准形。
第三章线性控制系统的能控性与能观测性分析3.1 线性连续系统的能控性3.2 线性连续系统的能观测性3.3 对偶原理3.4 线性离散系统的能控性和能观测性3.5 线性系统的结构分解3.6 线性连续系统的实现3.7 传递函数与能控性及能观测性之间的关系系统n x x x ,,,21L 状态1u 2u n u 1y 1y ny M M M M为什么要讨论系统的能控性和能观测性?能控性(Controllability)和能观测性(Observability)深刻地揭示了系统内部结构关系,由R.E.Kalman于60年代初首先提出并研究的这两个重要概念。
在现代控制理论的研究与实践中,具有极其重要的意义。
事实上,能控性与能观测性通常决定了最优控制问题解的存在性。
在极点配置问题中,状态反馈存在性由系统能控性决定;在观测器设计和最优估计中,涉及系统能观测性条件。
在本章中,我们的讨论将限于线性系统。
将首先给出能控性与能观测性的定义,然后推导出判别系统能控和能观测性的若干判据。
3.1.1 概述3.1 线性连续系统的能控性能控性和能观测性就是研究系统这个“黑箱”内部状态是否可由输入影响和是否可由输出反映。
u x x x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡2150042121&&[]⎥⎦⎤⎢⎣⎡−=2160x x y [例3.1]给定系统的描述为将其表为标量方程组形式,有:u x x+=114&u x x2522+−=&26x y −=分析:x 1、x 2受控于u y 与x 1无关y 与x 2有关[例3.2]:判断下列电路的能控和能观测性左上图:输入u(t),状态x(t),输出y(t)。
(t),x2(t)。
右上图:输入u(t),状态x1左图:输入u(t),状态x(t),x2(t),1输出y(t) 。
3.1.2 能控性的定义Ut B X t A X )()(+=&线性时变系统的状态空间描述:∑:),,,D C B A ()1.3)()()((U t D X t C t Y +=Jt ∈00)(X t X =其中:X 为n 维状态向量;U 为m 维输入向量;J 为时间t 的定义区间;A 为n*n 的元为t 的连续函数矩阵;B 为n*m 的元为t 的连续函数矩阵。