828D开机调试流程
- 格式:pdf
- 大小:369.78 KB
- 文档页数:7
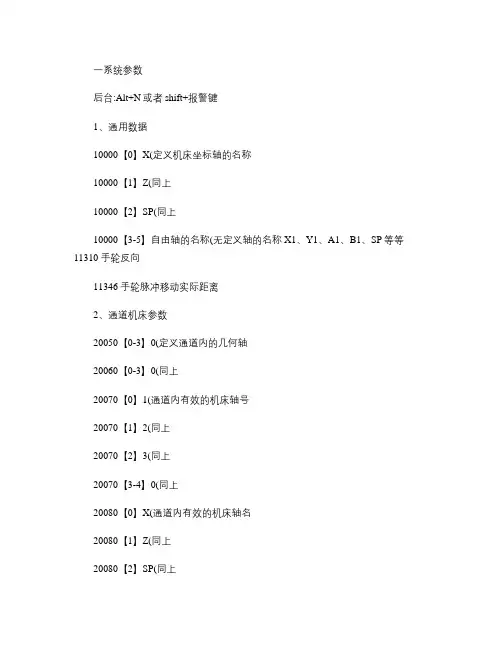
一系统参数后台:Alt+N或者shift+报警键1、通用数据10000【0】X(定义机床坐标轴的名称10000【1】Z(同上10000【2】SP(同上10000【3-5】自由轴的名称(无定义轴的名称X1、Y1、A1、B1、SP等等11310 手轮反向11346 手轮脉冲移动实际距离2、通道机床参数20050【0-3】0(定义通道内的几何轴20060【0-3】0(同上20070【0】1(通道内有效的机床轴号20070【1】2(同上20070【2】3(同上20070【3-4】0(同上20080【0】X(通道内有效的机床轴名20080【1】Z(同上20080【2】SP(同上20080【3-4】0(同上20700 0(未回参考点NC启动停止为13、轴参数通过“轴+”“轴-”更换轴,使用的同性质轴同时更改30100【5】1(模拟给定输出到轴控接口30110【1】1-驱动器号对于X轴(定义速度给定端口30110【2】2-驱动器号对于Z轴(同上30130【0】1(给定值输出类型,同时更改30220 同30110,实际值:驱动器号(定义位置反馈接口30240 1-实际值(编码器反馈类型,同时更改,1-相对编码器/2-仿真轴/4-绝对编码器30300 1(定义“回转轴”对于SP30310 1(回转轴取模转换,对于SP30320 1(取模360度位置显示,1为有效,对于SP31020 2048(每转的编码器线数,对于SP31030 10(丝杠螺距31040 1-直接测量系统32110 1-实际值(反馈记性:1/-131050【0-5】1(减速箱丝杠端齿轮齿数31060【0-5】5(减速箱电机端齿轮齿数32000 3000(最大轴速度,同时更改32010 2500(点动方式快速速度32100 电机转向(1/-132110 反馈极性(1/-132450 反向间隙补偿,回参考点后补偿生效(单位mm 36100 负方向软限位(单位mm,一般为负值36110 正方向软限位(单位mm,一般为正值设定主轴步骤如下:30300 1-定义为主轴(0-坐标轴/1-主轴30310 1-回转轴取模转换30320 1-取模360度位置显示(1-有效/0-无效35000 1-定义机床轴为主轴35100 实际值(最高主轴转速35110【0-5】主轴各档最高转速35120【0-5】主轴各档最低转速35130【0-5】主轴各档最高转速限制35140【0-5】主轴各档最低转速限制36200【0-5】各档速度监控的门限值带直接编码器的模拟量主轴30110 1-给定值模块号30220 1-编码器模块号30230 2-编码器信号端口号31000 实际值(0-编码器/1-光栅尺31010 实际值(光栅尺节点距离31020 实际值(编码器没转脉冲数NCK复位上电二驱动调试见手册14510【16】1H(用户数据车床14512【18】8H(用户数据K1使能。
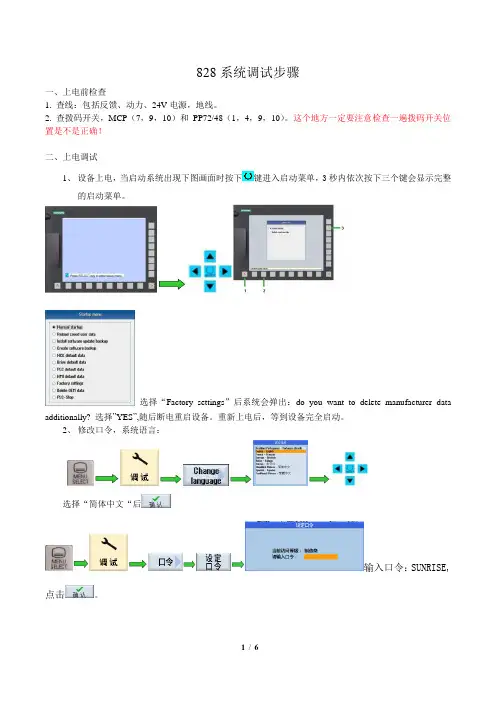
828系统调试步骤一、上电前检查1. 查线:包括反馈、动力、24V电源,地线。
2. 查拨码开关,MCP(7,9,10)和PP72/48(1,4,9,10)。
这个地方一定要注意检查一遍拨码开关位置是不是正确!二、上电调试1、设备上电,当启动系统出现下图画面时按下键进入启动菜单,3秒内依次按下三个键会显示完整的启动菜单。
选择“Factory settings”后系统会弹出:do you want to delete manufacturer data additionally? 选择”YES”,随后断电重启设备。
重新上电后,等到设备完全启动。
2、修改口令,系统语言:选择“简体中文“后输入口令:SUNRISE,点击。
3、 激活MCP 及PP72/48D搜索参数12986[0]=-1,12986[6]= -1。
4、 使用“PLC Programming Tool “软件连接828PLC 系统,下载PLC 控制程序。
4.1如上图所示:A :双击“通讯”在弹出的通讯设定对话框B:通讯参数:828系统PLC 地址:192、168、215、1。
电脑上的IP 地址选择自动获取。
C :更改TCP/IP 网卡,双击此处在弹出的对话框中,选择当前电脑启用的网卡。
D:以上三步设置结束后,双击刷新,此处会显示绿色的字体“828D ”,此时表明已经和828的PLC 建立了通讯,可以进行下载和上传程序了。
4.2 下载PLC 程序,下载程序时会出现如下对话框。
默认只下载PLC 程序和数据块的初始值。
如果要下载数据块的实际值,请勾选“数据模块”复选框。
ABCD如果只是对程序做了简单的修改,可以选择在RUN模式下下载;如果程序做了较大的改动或者新建了数据块,则必须在STOP模式下下载。
第一次下载时选择STOP模式。
4.3 程序下载成功后,点击启动PLC运行状态。
等待PLC重新启动运行后,观察MCP各按键指示灯状态。
若指示灯全部闪烁,则说明MCP板与PLC的通讯没有建立,请检查MCP背板的拨码开关位置和参数12986[6]设置是否正确。
目录一、安全检查 (2)二、出厂设置 (2)三、设定语言、日期 (3)四、开启外部设备 (3)五、自动升级驱动 (4)六、轴分配 (5)七、传输PLC (7)八、传输报警文本和制造商循环 (9)九、系统数据设定 (9)十、绝对值回零设定 (9)十一、伺服自动优化 (9)十二、镭射补偿 (9)一、安全检查●目测设备的下列项目:–机械结构是否正确,电气连接是否安全–电源是否接好,输入电压是否正确稳定–屏蔽层和接地是否接好●接通控制系统,在“Nor mal startup”的模式中启动系统:HMI 上出现初始画面后,表明控制系统已启动。
二、出厂设置启动控制系统操作步骤:1. 控制系统接通后,启动时会出现以下提示:2. 在 3 秒钟内,按下<SELECT>键。
3. 然后依次按下:菜单扩展键、HSK2(水平软键 SK2)、 VSK2(垂直软键 SK2)4. “Setup men u”显示在屏幕上,“Normal startup”被选为缺省设置。
选择功能Normal startup系统正常启动。
Reload saved user data系统从系统 CF 卡上载入其中保存的用户数据,软键“数据存储”。
Install从用户 CF 卡或 U 盘上安装系统 CF 卡的升级程序。
softwareupdate/backup三、设定语言、日期设置语言操作步骤:1. 选择操作区域“启动”。
2. 按下右侧“CHANGE LANGUAGE”软键。
3. 选择simplified chinese 简体中文。
4. 按下软键“确认”结束输入,立即转化成为中文界面。
设置日期和时间操作步骤:1. 选择操作区域“启动”。
2. 按下“HMI”软键。
3. 按下“日期时间”软键。
打开窗口“日期/时间”。
4. 在“格式”栏中选择需要的日期和时间的显示格式。
5. 按下软键“确认”结束输入。
新的日期或时间被接收并在“当前”栏的第一行中显示。
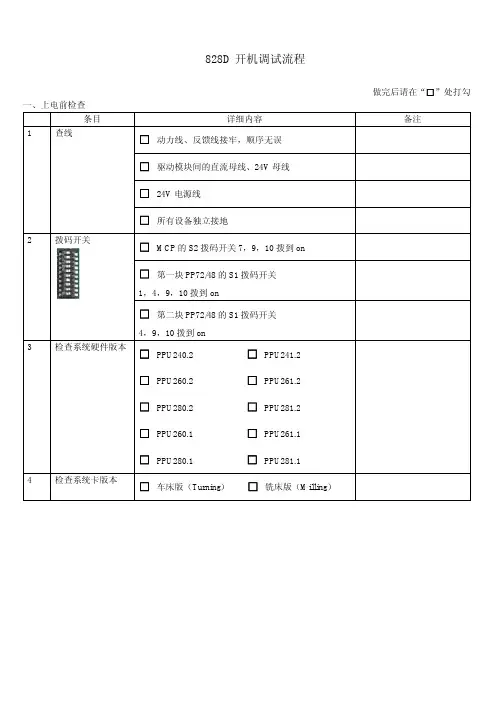
828D开机调试流程做完后请在“□”处打勾一、上电前检查条目详细内容备注1 查线□动力线、反馈线接牢,顺序无误□驱动模块间的直流母线、24V母线□24V电源线□所有设备独立接地2 拨码开关二、上电调试 条目详细内容备注1初始设定□ 设置系统语言为中文Chinese请参见简明调试手册3.4章节□ 输入制造商□令:SUNRISE请参见简明调试手册3.2章节□ 设置系统时间请参见简明调试手册3.3章节□ 进入选项界面,检查激活的选项请参见简明调试手册3.6章节□ 激活PP72/48,设置MD12986[0]=-1 有第二块I/O 板时需设置MD12986[1]=-1;请参见简明调试手册3.5章节 □ 激活MCP ,设置MD12986[6]=-1 使用自制机床操作面板时保持MD12986[6]=112 □ 设置RCS 远程诊断访问权限2检查系统软件版本□ V. + SP + HF3监控PLC I/O 点状态□ 监控IB115的状态,如果为0则代表MCP 不正常。
因为IB115的低5位是西门子MCP 进给倍率开关的地址,格雷码开关是不会出现全0状态的。
□ 输入点:急停开关、硬限位开关、报警信号点… □ 输出点:EP 、OFF1、OFF3使能…□ 手轮接线状态:摇手轮时监控DB2700.DBB12(手轮1脉冲计数),如果数值有变化说明手轮接线无误。
4下载PLC 程序□STOP 模式下载,下载后重启系统5PLC 基本功能调试□ MCP 功能是否正常 □ 急停、硬限位功能是否正常 □ 加EP ,OFF1,OFF3使能是否正常 □ 手轮轴选,增量是否正常6 驱动调试□ 拓扑识别请参见简明调试手册5.2章节□修改拓扑比较等级为中级:控制单元数据p9906=1如不修改会影响批量调试;请参见简明调试手册5.2章节□ 配置供电数据,输入电压380V请参见简明调试手册5.3章节□ 电网识别,设置供电数据p3410=5请参见简明调试手册5.3章节□ 分配轴:设置MD30110为电机动力线所在的驱动编号 设置MD30220为电机反馈线所在的驱动编号 设置MD30130=1,激活电机的给定信号设置MD30240=1或4,激活电机的反馈信号。
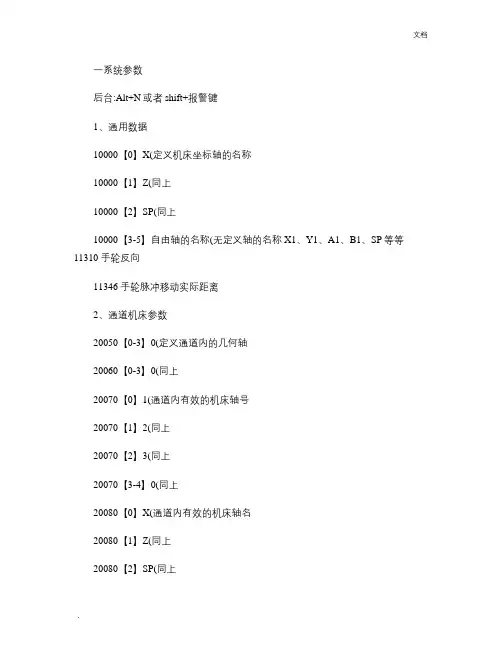
一系统参数后台:Alt+N或者shift+报警键1、通用数据10000【0】X(定义机床坐标轴的名称10000【1】Z(同上10000【2】SP(同上10000【3-5】自由轴的名称(无定义轴的名称X1、Y1、A1、B1、SP等等11310 手轮反向11346 手轮脉冲移动实际距离2、通道机床参数20050【0-3】0(定义通道内的几何轴20060【0-3】0(同上20070【0】1(通道内有效的机床轴号20070【1】2(同上20070【2】3(同上20070【3-4】0(同上20080【0】X(通道内有效的机床轴名20080【1】Z(同上20080【2】SP(同上20080【3-4】0(同上20700 0(未回参考点NC启动停止为13、轴参数通过“轴+”“轴-”更换轴,使用的同性质轴同时更改30100【5】1(模拟给定输出到轴控接口30110【1】1-驱动器号对于X轴(定义速度给定端口30110【2】2-驱动器号对于Z轴(同上30130【0】1(给定值输出类型,同时更改30220 同30110,实际值:驱动器号(定义位置反馈接口30240 1-实际值(编码器反馈类型,同时更改,1-相对编码器/2-仿真轴/4-绝对编码器30300 1(定义“回转轴”对于SP30310 1(回转轴取模转换,对于SP30320 1(取模360度位置显示,1为有效,对于SP31020 2048(每转的编码器线数,对于SP31030 10(丝杠螺距31040 1-直接测量系统32110 1-实际值(反馈记性:1/-131050【0-5】1(减速箱丝杠端齿轮齿数31060【0-5】5(减速箱电机端齿轮齿数32000 3000(最大轴速度,同时更改32010 2500(点动方式快速速度32100 电机转向(1/-132110 反馈极性(1/-132450 反向间隙补偿,回参考点后补偿生效(单位mm 36100 负方向软限位(单位mm,一般为负值36110 正方向软限位(单位mm,一般为正值设定主轴步骤如下:30300 1-定义为主轴(0-坐标轴/1-主轴30310 1-回转轴取模转换30320 1-取模360度位置显示(1-有效/0-无效35000 1-定义机床轴为主轴35100 实际值(最高主轴转速35110【0-5】主轴各档最高转速35120【0-5】主轴各档最低转速35130【0-5】主轴各档最高转速限制35140【0-5】主轴各档最低转速限制36200【0-5】各档速度监控的门限值带直接编码器的模拟量主轴30110 1-给定值模块号30220 1-编码器模块号30230 2-编码器信号端口号31000 实际值(0-编码器/1-光栅尺31010 实际值(光栅尺节点距离31020 实际值(编码器没转脉冲数NCK复位上电二驱动调试见手册14510【16】1H(用户数据车床14512【18】8H(用户数据K1使能。
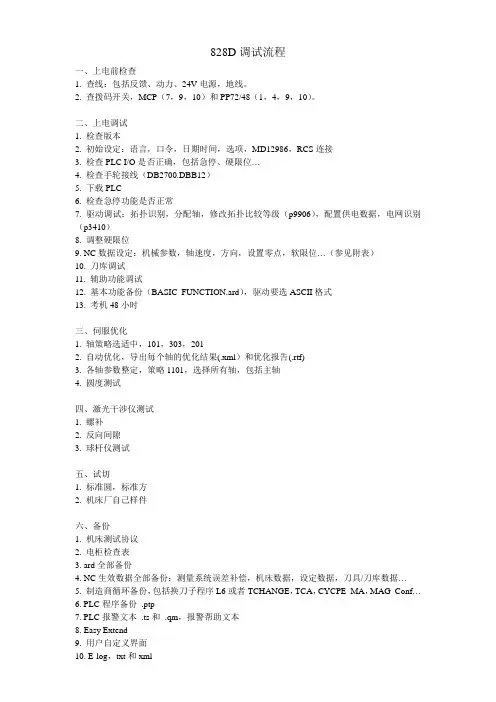
828D调试流程一、上电前检查1. 查线:包括反馈、动力、24V电源,地线。
2. 查拨码开关,MCP(7,9,10)和PP72/48(1,4,9,10)。
二、上电调试1. 检查版本2. 初始设定:语言,口令,日期时间,选项,MD12986,RCS连接3. 检查PLC I/O是否正确,包括急停、硬限位…4. 检查手轮接线(DB2700.DBB12)5. 下载PLC6. 检查急停功能是否正常7. 驱动调试:拓扑识别,分配轴,修改拓扑比较等级(p9906),配置供电数据,电网识别(p3410)8. 调整硬限位9. NC数据设定:机械参数,轴速度,方向,设置零点,软限位…(参见附表)10. 刀库调试11. 辅助功能调试12. 基本功能备份(BASIC_FUNCTION.ard),驱动要选ASCII格式13. 考机48小时三、伺服优化1. 轴策略选适中,101,303,2012. 自动优化,导出每个轴的优化结果(.xml)和优化报告(.rtf)3. 各轴参数整定,策略1101,选择所有轴,包括主轴4. 圆度测试四、激光干涉仪测试1. 螺补2. 反向间隙3. 球杆仪测试五、试切1. 标准圆,标准方2. 机床厂自己样件六、备份1. 机床测试协议2. 电柜检查表3. ard全部备份4. NC生效数据全部备份:测量系统误差补偿,机床数据,设定数据,刀具/刀库数据…5. 制造商循环备份,包括换刀子程序L6或者TCHANGE,TCA,CYCPE_MA,MAG_Conf…6. PLC程序备份.ptp7. PLC报警文本.ts和.qm,报警帮助文本8. Easy Extend9. 用户自定义界面10. E-log,txt和xml11. 系统许可证备份.Alm12. 优化测试结果截图13. 圆度测试结果截图14. PLC IO地址15. 机床操作说明:MCP自定义键说明,M代码功能说明,PLC报警文本内容说明,PLC 数据MD14510说明,刀库操作说明16. 照片:机床、电柜、试切17. 试切件程序附表:常用机床数据传动系统参数MD32100 AX_MOTION_DIR 轴运动方向(不是反馈极性)MD31030 LEADSCREW_PITCH 丝杠螺距MD31040 ENC_IS_DIRECT[0]…[1] 直接测量系统MD31050 DRIVE_AX_RA TIO_DENOM[0]...[5] 负载变速箱分母MD31060 DRIVE_AX_RA TIO_NUMERA[0]...[5] 负载变速箱分子轴速度MD32000 MAX_AX_VELO 最大轴速度MD32010 JOG_VELO_RAPID 点动方式快速速度MD32020 JOG_VELO 点动速度MD36200 AX_VELO_LIMIT[0]...[5] 速度监控的门限值主轴相关MD35010 GEAR_STEP_CHANGE_ENABLE 齿轮级改变使能MD35110 GEAR_STEP_MAX_VELO[0]...[5] 主轴各档最高转速MD35120 GEAR_STEP_MIN_VELO[0]...[5] 主轴各档最低转速MD35130 GEAR_STEP_MAX_VELO_LIMIT[0]...[5] 主轴各档最高转速限制MD35140 GEAR_STEP_MIN_VELO_LIMIT[0]...[5] 主轴各档最低转速限制SD43200 SA_SPIND_S 通过VDI 进行主轴起动时的速度返回参考点MD34010 REFP_CAM_DIR_IS_MINUS 负方向返回参考点MD34020 REFP_VELO_SEARCH_CAM 寻找参考点开关的速度MD34040 REFP_VELO_SEARCH_MARKER 寻找零脉冲的速度MD34060 REFP_MAX_MARKER_DIST 寻找零标记的最大距离MD34070 REFP_VELO_POS 返回参考点的定位速度MD34100 REFP_SET_POS 参考点(相对于机床坐标系)的位置MD34110 REFP_CYCLE_NR 返回参考点次序MD34200 ENC_REFP_MODE[0]…[1] 返回参考点模式MD34210 ENC_REFP_STA TE[0]…[1] 绝对值编码器调试状态MD11300 JOG_INC_MODE_LEVELTRIGGRD 返回参考点触发方式软限位MD36100 POS_LIMIT_MINUS 第一软限位负向MD36110 POS_LIMIT_PLUS 第一软限位正向优化MD32200 POSCTRL_GAIN[0]...[5] 位置环增益MD32810 EQUIV_SPEEDCTRL_TIME[0]...[5] 速度控制环等效时间常数MD32640 STIFFNESS_CONTROL_ENABLE 动态刚性控制MD32420 JOG_AND_POS_JERK_ENABLE 手动和定位方式下轴加加速度限制使能MD32430 JOG_AND_POS_MAX_JERK 手动方式下轴加加速度最大值MD32431 MAX_AX_JERK[0]…[4] 自动方式下轴加加速度最大值MD32432 PA TH_TRANS_JERK_LIM[0]…[4] 轨迹控制时程序段过渡处轴加加速度最大值刀库管理MD20270 CUTTING_EDGE_DEFAULT 未编程时刀具刀沿的默认设置MD20310 MC_TOOL_MANAGEMENT_MASK 激活不同类型的刀具管理MD52270 MCS_TM_FUNCTION_MASK 刀库管理功能。
一系统参数后台:Alt+N或者shift+报警键1、通用数据10000【0】X(定义机床坐标轴的名称10000【1】Z(同上10000【2】SP(同上10000【3-5】自由轴的名称(无定义轴的名称X1、Y1、A1、B1、SP等等11310 手轮反向11346 手轮脉冲移动实际距离2、通道机床参数20050【0-3】0(定义通道内的几何轴20060【0-3】0(同上20070【0】1(通道内有效的机床轴号20070【1】2(同上20070【2】3(同上20070【3-4】0(同上20080【0】X(通道内有效的机床轴名20080【1】Z(同上20080【2】SP(同上20080【3-4】0(同上20700 0(未回参考点NC启动停止为13、轴参数通过“轴+”“轴-”更换轴,使用的同性质轴同时更改30100【5】1(模拟给定输出到轴控接口30110【1】1-驱动器号对于X轴(定义速度给定端口30110【2】2-驱动器号对于Z轴(同上30130【0】1(给定值输出类型,同时更改30220 同30110,实际值:驱动器号(定义位置反馈接口30240 1-实际值(编码器反馈类型,同时更改,1-相对编码器/2-仿真轴/4-绝对编码器30300 1(定义“回转轴”对于SP30310 1(回转轴取模转换,对于SP30320 1(取模360度位置显示,1为有效,对于SP31020 2048(每转的编码器线数,对于SP31030 10(丝杠螺距31040 1-直接测量系统32110 1-实际值(反馈记性:1/-131050【0-5】1(减速箱丝杠端齿轮齿数31060【0-5】5(减速箱电机端齿轮齿数32000 3000(最大轴速度,同时更改32010 2500(点动方式快速速度32100 电机转向(1/-132110 反馈极性(1/-132450 反向间隙补偿,回参考点后补偿生效(单位mm 36100 负方向软限位(单位mm,一般为负值36110 正方向软限位(单位mm,一般为正值设定主轴步骤如下:30300 1-定义为主轴(0-坐标轴/1-主轴30310 1-回转轴取模转换30320 1-取模360度位置显示(1-有效/0-无效35000 1-定义机床轴为主轴35100 实际值(最高主轴转速35110【0-5】主轴各档最高转速35120【0-5】主轴各档最低转速35130【0-5】主轴各档最高转速限制35140【0-5】主轴各档最低转速限制36200【0-5】各档速度监控的门限值带直接编码器的模拟量主轴30110 1-给定值模块号30220 1-编码器模块号30230 2-编码器信号端口号31000 实际值(0-编码器/1-光栅尺31010 实际值(光栅尺节点距离31020 实际值(编码器没转脉冲数NCK复位上电二驱动调试见手册14510【16】1H(用户数据车床14512【18】8H(用户数据K1使能。

1.检查接线,PP72/48的地址拨码,MCP地址拨码开关PP72/48 PN SI: ON: 149,10MCP: S2:ON:7,9,102.上电总清SIEMKNS| ■庇购Q逊丽空C Delete OEM dataO PLC-Stoo1. 设置口令,时间,选择选项功能2. 设置基本的机床参数N10000 SMN_AXCONF_MACHAX_NAME_TAB[0]N10000 $MN_AXCONF_MACHAX_NAME_TAB[ 1 ]N10000 SMN_AXCONF_MACHAX_NAME_TAB [ 2]N10000 $MN_AXCONF_MACHAX_NAME_TAB[3]N10000 SMN_AXCONF_MACHAX_NAME_TAB[4]N20050 $MC_AXCONF_GEOAX_ASSIGN_TAB[ l]=0N2OO5O $MC_AXCONF_GEOAX_ASSIGN_TAB[2]=2 N20070 SMC_AXCONF_MACHAX_USED[4]=5N20080 SMC_AXCONF_CHANAX_NAME_TAB[0]=”X”N20080 $MC_AXCONF_CHANAX_NAME_TAB[ 1]=H Z MN2OO8O $MC_AXCONF_CHANAX_NAME_TAB[2]=”C”N20080 $MC_AXCONF_CHANAX_NAME_TAB[3]=”B”N20080 $MC_AXCONF_CHANAX_NAME_TAB[4]iSP ,N28O5O=3OO number of R parameters设置Profinet 上有效的模块MD12986(0]=-1 PP72/48 PNMD12986[6]=-1 MCP令 INPUTINPUTH MX M H MZ H H MC n n MB H H MSP HMD20310bit9=l 将刀库设为模拟刀库 MD20700=01. 只下载MCP 面板控制程序,其他程序不下载。

创作编号:GB8878185555334563BT9125XW创作者:凤呜大王*1.检查接线,PP72/48的地址拨码,MCP地址拨码开关PP72/48 PN S1: ON:1,4,9,10MCP:S2: ON:7,9,102.上电总清3.设置口令,时间,选择选项功能4.设置基本的机床参数N10000 $MN_AXCONF_MACHAX_NAME_TAB[0]="MX" N10000 $MN_AXCONF_MACHAX_NAME_TAB[1]="MZ" N10000 $MN_AXCONF_MACHAX_NAME_TAB[2]="MC" N10000 $MN_AXCONF_MACHAX_NAME_TAB[3]="MB" N10000 $MN_AXCONF_MACHAX_NAME_TAB[4]="MSP" N20050 $MC_AXCONF_GEOAX_ASSIGN_TAB[1]=0N20050 $MC_AXCONF_GEOAX_ASSIGN_TAB[2]=2N20070 $MC_AXCONF_MACHAX_USED[4]=5N20080 $MC_AXCONF_CHANAX_NAME_TAB[0]="X"N20080 $MC_AXCONF_CHANAX_NAME_TAB[1]="Z"N20080 $MC_AXCONF_CHANAX_NAME_TAB[2]="C"N20080 $MC_AXCONF_CHANAX_NAME_TAB[3]="B"N20080 $MC_AXCONF_CHANAX_NAME_TAB[4]="SP"N28050=300 number of R parameters设置Profinet上有效的模块MD12986[0]=-1 PP72/48 PNMD12986[6]=-1 MCPMD20310 bit9=1 将刀库设为模拟刀库MD20700=05.只下载MCP面板控制程序,其他程序不下载。
目录1一、安全检查 (2)2二、出厂设置 (2)3三、设定语言、日期 (4)4四、开启外部设备 (5)5五、自动升级驱动 (5)6六、轴分配 (7)7七、传输PLC (10)8八、传输报警文本和制造商循环 (11)9九、系统数据设定 (12)10十、绝对值回零设定 (12)11十一、伺服自动优化 (13)12十二、镭射补偿 (17)13141516171819一、安全检查20●目测设备的下列项目:2122–机械结构是否正确,电气连接是否安全2324–电源是否接好,输入电压是否正确稳定2526–屏蔽层和接地是否接好2728●接通控制系统,在“Nor mal startup”的模式中启动系统:2930HMI 上出现初始画面后,表明控制系统已启动。
31二、出厂设置32启动控制系统3334操作步骤:35361. 控制系统接通后,启动时会出现以下提示:37382. 在 3 秒钟内,按下<SELECT>键。
39403. 然后依次按下:4142菜单扩展键、HSK2(水平软键 SK2)、 VSK2(垂直软键 SK2)43444. “Setup men u”显示在屏幕上,“Normal startup”被选为缺省设45置。
4647控制系统的启动方式48选择功能Normal startup系统正常启动。
Reload saved user data系统从系统 CF 卡上载入其中保存的用户数Install 从用户 CF 卡或 U 盘上安装系统 CF 卡的Create software backup将系统 CF 卡的数据备份到用户 CF 卡或 UNCK default data系统载入供货时设置的西门子 NCK 数据,删Drive default data删除 SINAMICS 用户数据。
PLC default data PLC 清零,载入缺省 NOP PLC 程序。
HMI default data删除 HMI 上的用户数据。
828D调试流程调试是软件开发过程中非常重要的一部分,它可以帮助开发人员识别和修复软件中的错误和缺陷。
在调试过程中,开发人员需要使用一定的方法和策略来有效地定位和解决问题。
下面是一个基本的828D调试流程,包括以下几个步骤:1.确认问题:在开始调试之前,开发人员需要与用户或测试人员沟通,了解出现的问题并尽可能详细地描述。
在确认问题之后,与用户或测试人员一起分析问题,确保所有相关信息都已经收集和理解。
2.复现问题:为了准确地定位问题,开发人员需要尽可能准确地复现问题。
这可以通过使用相同的环境、数据和条件来实现。
如果无法复现问题,可能需要进一步了解可能的原因以及如何重现问题。
3.分析代码:一旦问题被复现,开发人员可以开始分析代码以查找问题。
这包括查看相关的日志文件、调试信息、错误报告以及相关代码段。
开发人员应该借助调试工具和技术来帮助定位问题,例如断点调试、日志输出、性能分析等。
4.突出关键点:在分析代码时,开发人员需要特别关注可能与问题相关的关键点。
这可能是问题发生的地方,也可能是其他可能引起问题的代码段。
开发人员可以使用调试工具来逐步执行代码,并观察其行为以找出问题所在。
5.排除可能的原因:在找到问题所在之后,开发人员需要进一步排除其他可能的原因。
这可能包括与其他模块的交互、并发问题、内存管理问题、网络问题等。
开发人员可以使用一些常见的调试技巧来定位和排除这些潜在的原因。
6.修复问题:一旦问题被定位和确认,开发人员可以开始解决问题。
这可能包括修复代码中的错误、重新设计或优化算法、增加异常处理、修改配置文件等。
修复后,开发人员需要进行一系列的测试以确保问题得到解决。
7.测试和验证:在修复问题之后,开发人员需要进行测试和验证,以确保问题已经完全解决。
这可能包括单元测试、集成测试、系统测试等。
如果问题没有完全解决,开发人员需要返回到调试过程中,重新分析并修复问题。
8.文档和总结:在调试过程完成后,开发人员需要将整个过程进行文档化和总结。
目录一、安全检查 (2)二、出厂设置 (2)三、设定语言、日期 (3)四、开启外部设备 (3)五、自动升级驱动 (4)六、轴分配 (6)七、传输PLC (8)八、传输报警文本和制造商循环 (9)九、系统数据设定 (9)十、绝对值回零设定 (10)十一、伺服自动优化 (10)十二、镭射补偿 (13)一、安全检查●目测设备的下列项目:–机械结构是否正确,电气连接是否安全–电源是否接好,输入电压是否正确稳定–屏蔽层和接地是否接好●接通控制系统,在“Nor mal startup”的模式中启动系统:HMI上出现初始画面后,表明控制系统已启动。
二、出厂设置启动控制系统操作步骤:1. 控制系统接通后,启动时会出现以下提示:2. 在 3 秒钟内,按下<SELECT>键。
3. 然后依次按下:菜单扩展键、HSK2(水平软键 SK2)、 VSK2(垂直软键 SK2)4. “Setup men u”显示在屏幕上,“Normal startup”被选为缺省设置。
选择功能Normal startup系统正常启动。
Reload saved user data系统从系统 CF 卡上载入其中保存的用户数据,软键“数据存储”。
Installsoftwareupdate/backup从用户 CF 卡或 U 盘上安装系统 CF 卡的升级程序。
三、设定语言、日期设置语言操作步骤:1. 选择操作区域“启动”。
2. 按下右侧“CHANGE LANGUAGE”软键。
3. 选择simplified chinese 简体中文。
4. 按下软键“确认”结束输入,立即转化成为中文界面。
设置日期和时间操作步骤:1. 选择操作区域“启动”。
2. 按下“HMI”软键。
3. 按下“日期时间”软键。
打开窗口“日期/时间”。
4. 在“格式”栏中选择需要的日期和时间的显示格式。
5. 按下软键“确认”结束输入。
新的日期或时间被接收并在“当前”栏的第一行中显示。
828D开机调试流程开机调试是指将新组装好或更换了主要硬件的计算机系统启动并配置好各种参数,使其能够正常运行和使用。
下面是一个常规的828D开机调试流程:1.硬件检查:a.检查主机是否连接到电源、显示器、键盘、鼠标等外部设备,并确保连接牢固。
b.检查内存插槽、扩展卡槽等硬件接口是否清洁并没有杂质。
c.检查硬盘、光驱、网卡等硬件是否正确连接。
2.BIOS设置:a.启动计算机并按下DEL、F2等键进入BIOS设置界面。
b.在BIOS设置界面中,可以设置日期、时间、主板参数、启动顺序等。
c.确保启动顺序设置为首先从硬盘启动,其次是光驱、USB、网卡等。
d.保存并退出BIOS设置。
3.操作系统安装:a.将操作系统安装光盘或U盘插入计算机。
b.重启计算机,并在启动时按下F8、F12等键选择从光驱或U盘启动。
c.按照操作系统安装向导的提示进行安装,包括选择安装分区、设置用户名和密码等。
d.安装完成后,重启计算机。
4.驱动程序安装:a.安装操作系统后,需要安装相应的硬件驱动程序。
d.安装驱动程序时,按照向导指引完成安装即可。
5.系统配置:a.首先进行网络配置,设置IP地址、子网掩码、网关等网络参数,确保正常上网。
b.根据实际需求,可以对鼠标、键盘、显示器等外设进行配置。
c.在控制面板中进行系统性能设置,如修改虚拟内存大小、定时检查磁盘错误等。
d.安装常用软件和工具,并进行相应的配置,如办公软件、杀毒软件、浏览器等。
6.系统测试:a. 运行性能测试工具,检测系统的稳定性和性能,如CPU-Z、3DMark等。
b.检查系统的硬件设备是否正常工作,如声音、图像、网络等。
c.测试外设设备是否正常连接和运行,如打印机、摄像头等。
7.系统备份和优化:a.在系统调试完成后,建议及时备份操作系统和重要数据,以防止丢失或损坏。
b.对系统进行优化和清理,如清理临时文件、定期清理磁盘碎片、定期更新系统及驱动等。
8.系统维护:a.对计算机进行定期检查和维护,如清理灰尘、更换硬盘、内存等维护操作。
目录一、安全检查 (2)二、出厂设置 (2)三、设定语言、日期 (3)四、开启外部设备 (3)五、自动升级驱动 (4)六、轴分配 (6)七、传输PLC (8)八、传输报警文本和制造商循环 (9)九、系统数据设定 (9)十、绝对值回零设定 (10)十一、伺服自动优化 (10)十二、镭射补偿 (13)一、安全检查●目测设备的下列项目:–机械结构是否正确,电气连接是否安全–电源是否接好,输入电压是否正确稳定–屏蔽层和接地是否接好●接通控制系统,在“Nor mal startup”的模式中启动系统:HMI 上出现初始画面后,表明控制系统已启动。
二、出厂设置启动控制系统操作步骤:1. 控制系统接通后,启动时会出现以下提示:2. 在 3 秒钟内,按下<SELECT>键。
3. 然后依次按下:菜单扩展键、HSK2(水平软键SK2)、VSK2(垂直软键SK2)4. “Setup men u”显示在屏幕上,“Normal startup”被选为缺省设置。
三、设定语言、日期设置语言操作步骤:1. 选择操作区域“启动”。
2. 按下右侧“CHANGE LANGUAGE”软键。
3. 选择simplified chinese 简体中文。
4. 按下软键“确认”结束输入,立即转化成为中文界面。
设置日期和时间操作步骤:1. 选择操作区域“启动”。
2. 按下“HMI”软键。
3. 按下“日期时间”软键。
打开窗口“日期/时间”。
4. 在“格式”栏中选择需要的日期和时间的显示格式。
5. 按下软键“确认”结束输入。
新的日期或时间被接收并在“当前”栏的第一行中显示。
四、开启外部设备因为SINUMERIK 828D 采用外设模块固定的最大配置运行。
在出厂时,禁止外设模块传输数据到PLC 输入/输出映像区,所以需要手动开启外设模块。
1、首先把外部设备的DIP开关拨到正确位置MCP 面板(7、9、10)ONPN72/48 I/O模块(1、4、9、10)ON五、自动升级驱动1、当出厂设置完成后再上电,开机会提示首次开机调试成功2、当设定完12986后,再次上电时,系统会提示升级驱动3、确认,升级完成后复位即可完成驱动拓扑六、轴分配分配轴功能可以帮助我们设置与驱动相关的轴机床数据,如MD30110,MD30130,MD30220,MD30240,MD31020 等等。
S i n u m e r i k 828DSINUMERIK 828D 第 1 页 B068调试顺序单元描述:Sinumerik 828D CNC 控制系统是为了中等机床刀具市场而开发的。
在中等机床刀具市场中,除了通过外接CAD /CAM 类型的系统进行编程,也需要在机床上编程。
这些被大量销售的机床应该展示出相似的工作特性。
调试工程师通过执行已定义的调试步骤来保证这种相似性。
B068 单元目标:在完成本单元的学习之后,您将能够按照已定义的调试步骤配置并调试带主轴以及附加了第四轴的3轴铣削机床。
该步骤是保证机床安装的兼容性及质量的必要手段。
驱动配置(调试工具) NC 轴分配 第二节准备控制系统 第三节第四节第五节第六节NC 机床数据 第七节硬件及软件要求/调试顺序 配置MCP 及外围设备 轴使能 第八节驱动优化 第九节数据管理 第十节B068目录:第二节硬件及软件要求/调试顺序批注 1. 工具/软件安装单元B0022. 加载标准数据控制系统必须加载默认数据以便根据机床工艺类型设置默认机床数据(铣削/车削)。
在调试过程中,选择打开控制系统,等待控制系统显示以下窗口。
在3秒钟之内,按“请选择SELECT键进入setup菜单控制系统显示基本“Set-up”菜单,根据下图中的数字顺序选择按键以显示高级“Start-up”菜单。
请选择SELECT键进入setup菜单u2B068第 4 页选择“Yes”确认执行操作。
第三节允许控制系统完全调试,这个过程最多需要5分钟。
控制系统前面板上的绿色将常准备控制系统批注如果系统未使用所需的语言,可修改语言。
设置口令以使能待查看及修改的机床数据等。
建议使用密码 - “SUNRISE”, 然后按“确认”软键。
使用“取消报警”键确认报警号铣削机床已经加载标准数据并且被配置为在激活额外的轴之前,必须确保选件可用。
按以下顺序使用软键以查看/激活许可证:B068第 6 页第三节输入值1并选择“复位 (po)”软键以激活选件。