位移与转速测量(经典版)
- 格式:ppt
- 大小:4.14 MB
- 文档页数:36
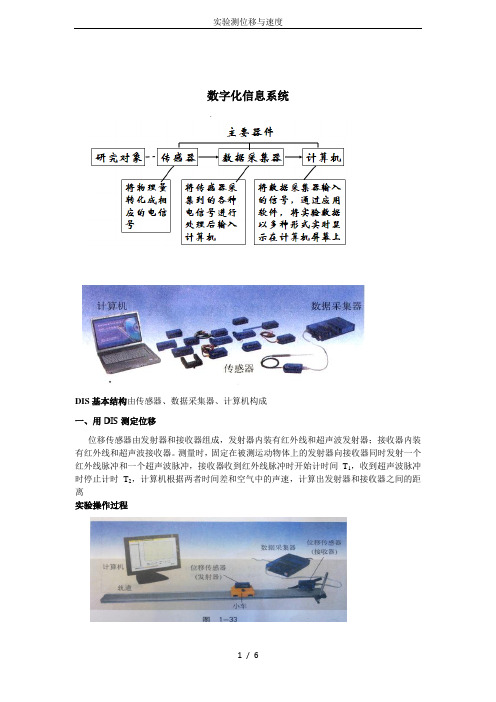
数字化信息系统DIS基本结构由传感器、数据采集器、计算机构成一、用DIS测定位移位移传感器由发射器和接收器组成,发射器内装有红外线和超声波发射器;接收器内装有红外线和超声波接收器。
测量时,固定在被测运动物体上的发射器向接收器同时发射一个红外线脉冲和一个超声波脉冲,接收器收到红外线脉冲时开始计时间T1,收到超声波脉冲时停止计时T2,计算机根据两者时间差和空气中的声速,计算出发射器和接收器之间的距离实验操作过程1、连接数据采集器与计算机,将位移传感器的接收器接入数据采集器。
2、开启电源(包括位移传感器的发射器电源),运用DIS应用软件。
3、点击DIS“实验条目”中的“练习使用DIS”。
4、将位移传感器的发射器与接收器正对放置,点击“开始记录”,观察计算机界面上的数据变化,并与刻度尺的测量结果进行比较。
5、改变接收器和发射器的相对距离,测量其可测的最大距离,最小距离,并将实验结果填入表格内。
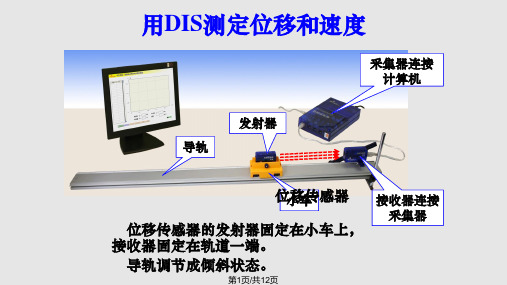
二、通过DIS研究s-t图测平均速度实验装置1.将位移传感器的发射器固定在小车上,接收器固定在轨道右端(轨道稍倾斜,使小车能做变速直线运动),将接收器与数据采集器相连,连接数据采集器与计算机。
2.开启电源,运行DIS应用软件,点击“实验条目”中的“用DIS测定位移与速度”,界面如下图所示点击“开始记录”,放开小车使其运动。
计算机界面的表格内,将出现小车的位移随时间变化的取样点数据,同时在s-t图将出现对应的数据点。
从点的走向可大致看出小车位移随时间变化的规律。
点击“数据点连线”得到位移随时间变化的曲线。
通过研究变速直线运动的s-t图,从中求出物体的位移和速度。
获得s-t图后,点击“选择区域”,先后将AD,AC,AB选定为研究区域,观察实验界面下方速度窗口中显示的数据,并将数值填入表格中。
表格:研究区域的平均速度三、用DIS测变速直线运动的瞬时速度实验目的:测变速直线运动的瞬时速度。
实验原理:理解物体在做变速直线运动时,在某一位置的瞬时速度本质上是物体无限逼近该位置(或该时刻)的一段位移(或一段时间)内的平均速度。

实验一:用DIS测量运动物体的位移和速度一、用DIS测位移和平均速度实验目的:研究变速直线运动物体的s-t图像,并从中求物体的位移和平均速度实验原理:斜面上小车从静止开始加速下滑,利用位移传感器记录小车的位移随时间变化的过程,通过DIS实验系统的专用软件,显示小车的位移随时间变化的曲线。
然后选择不同的研究区域,计算相应区域的平均速度。
实验器材:小车、1m长的轨道、DIS(位移传感器、数据采集器、计算机等)。
实验装置:实验步骤:1)连接如图:将位移传感器接收端固定在侧面固定板上,放在轨道高端,连接到数据采集器的二号口(注:位移传感器不能插在一号口上);将位移传感器发射端固定到小车上,并使之与接收端基本正对。
2)双击图标,打开DAS程序,等待传感器自动连接,待变成,传感器就连接成功了。
单击“新课改实验”,双击实验条目“用DIS测定位移和速度”,进入实验界面。
3)将小车放到倾斜的轨道上,打开位移传感器发射端的电源开关,点击“”,放手让小车下滑。
4)当获得的s-t 图线如(图1)所示时,表明此次数据采集完成,点击“”,并关闭位移传感器发射端的电源开关。
图1 图25)点击“选择范围”按钮,以便在s-t 图线上选择研究区域。
把鼠标移到左侧y轴附近的“开始点选择线”,此时鼠标变形为手指。
单击并按住左键,拖拉选择线,选定研究区域的“开始点”;同样方法用右侧的“结束点选择线”,确定“结束点”。
此时在软件界面左下方的数据窗口中,即可显示出研究区域内s-t 图线的初位移、末位移、时间差、速度的值,如(图2)。
如果选不同的区域,得到的速度基本一样,说明运动是匀速的。
6)点击“v-t 图像”,图像变为研究区域内s-t 图线对应的v-t 图线。
点击“选择范围”按钮,按步骤5在v-t 图线上选择“开始点”和“结束点”,此时在软件界面左下方的数据窗口中,即可显示出研究区域内v-t 图线的初速度、末速度、时间差、加速度的值。
7)点击软件窗口右下角“截取屏幕”按钮,可将当前实验结果以图像文件的形式保存下来,记录在电脑中。

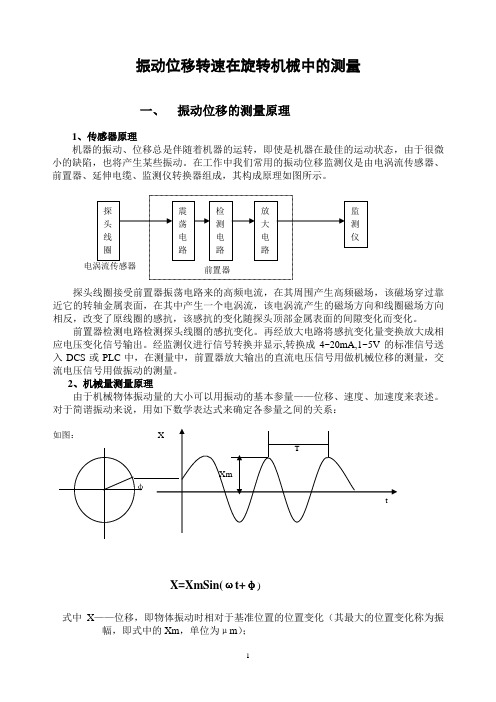
振动位移转速在旋转机械中的测量一、 振动位移的测量原理1、传感器原理机器的振动、位移总是伴随着机器的运转,即使是机器在最佳的运动状态,由于很微小的缺陷,也将产生某些振动。
在工作中我们常用的振动位移监测仪是由电涡流传感器、前置器、延伸电缆、监测仪转换器组成,其构成原理如图所示。
探头线圈接受前置器振荡电路来的高频电流,在其周围产生高频磁场,该磁场穿过靠近它的转轴金属表面,在其中产生一个电涡流,该电涡流产生的磁场方向和线圈磁场方向相反,改变了原线圈的感抗,该感抗的变化随探头顶部金属表面的间隙变化而变化。
前置器检测电路检测探头线圈的感抗变化。
再经放大电路将感抗变化量变换放大成相应电压变化信号输出。
经监测仪进行信号转换并显示,转换成4~20mA,1~5V 的标准信号送入DCS 或PLC 中,在测量中,前置器放大输出的直流电压信号用做机械位移的测量,交流电压信号用做振动的测量。
2、机械量测量原理由于机械物体振动量的大小可以用振动的基本参量——位移、速度、加速度来表述。
对于简谐振动来说,用如下数学表达式来确定各参量之间的关系:X=XmSin(ωt+φ)式中 X ——位移,即物体振动时相对于基准位置的位置变化(其最大的位置变化称为振幅,即式中的Xm ,单位为μm );t——时间;ω——圆频率;φ——初始相角,根据上图的机械实际变化量,电涡流传感器能够真实地把它反映到输出电压变化上,并根据量值对振动进行指示。
如传感器特性为7.87V/mm, V峰-峰=78.7mv则此时振动值应为10μm,但在实际工作时我们用万用表测量的交流电压是有效值,必须进行换算,就有如下公式:振动值=交流毫伏值*2.828/7.87(此式在处理故障时非常实用)对实际测量产生的振动量,转换前进行计算,确定量值,比对转换器输出。
机械位移主要是指轴的轴向移动量,根据电涡流传感器的工作原理,感抗的变化随探头与顶部金属表面的间隙变化而变化,正是利用这点,我们对轴位移量进行测量。
第九章位移的测量机械工程中经常要求测量位移。
位移测量从被测量的角度可分为线位移测量和角位移测量;从测量参数特性的角度可分为静态位移测量和动态位移测量。
许多动态参数,如力、扭矩、速度、加速度等都是以位移测量为基础的。
位移是物体上某一点在一定方向上的位置变动,因此位移是矢量。
测量方向与位移方向重合才能真实地测量出位移量的大小。
若测量方向与位移方向不重合,则测量结果仅是该位移量在测量方向上的分量。
测量时应当根据不同的测量对象选择测量点、测量方向和测量系统,其中传感器对测量精度影响很大,必须特别重视。
§9-1常用位移传感器测量位移的方法很多,通过电测或者非电测的手段,将位移转换成模拟量或者数字量,根据测量原理的不同,一般可以分为下列几类:(1) 被测位移使传感器结构发生变化,把位移量转换成电量,如电位器式传感器、电容式传感器、电感式传感器、差动变压器式传感器、电涡流式传感器、霍尔式传感器等均能实现位移测量。
(2) 利用某些功能材料的效应,如压电传感器、金属应变片、半导体应变片等,通过将小的位移转换成电荷或者应变阻值的变化,实现位移的测量。
(3) 将位移量转换成数字量,光电式光栅和光电编码器;磁电式磁栅和感应同步器。
表9-1列出了机械位移测量常用方法及其主要性能。
表9-1 机械位移测量常用方法类型测量范围精确度线性度特点电阻式滑线式线位移角位移变阻器线位移角位移1~300mm0°~360°1~1000mm0~60周0.1%0.1%0.5%0.5%±0.1%±0.1%±0.5%±0.5%分辨率较高,可用于静、动态测量,机械结构不牢固分辨率低、电噪声大,机械结构牢固应变片式非粘贴式粘贴式半导体式±0.15%应变±0.3%应变±0.25%应变0.1%2%-3%2%~3%±0.1%满刻度±20%不牢固牢固、需要温度补偿和高绝缘电阻输出大、对温度敏感电容式变面积变极距10-3~100mm10-3~10mm0.005%0.1%±1% 易受温度、湿度变化的影响,测量范围小,线性范围也小,分辨率很高电感式自感变间隙式螺管式特大型±0.2mm0.5~2mm200~300mm1% ±3%0.15%~1%限于微小位移测量方便可靠、动态特性差差动变压器±0.08~75mm ±0.5% ±0.5% 分辨率很高,有干扰磁场时需屏蔽电涡流式 0~100mm ±1~3% <3% 分辨率很高,受被测物体材质、形状、加工质量影响同步机 360°±0.1°~0.7°±0.05 对温度、湿度不敏感,可在120r/min转速下工作微动同步器旋转变压器±10°±60°±0.05%±0.1% 非线性误差与电压比及测量范围有关感应同步器直线式旋转式10-3~104mm0~360°2.5μm/250mm0.5″模拟和数字混合测量系统数显,直线式分辨率可达1μm光栅长光栅圆光栅10-3~104mm0~360°3μm/m0.5″工作方式与感应同步器相同,直线式分辨率可达0.1~1μm磁栅长磁栅圆磁栅10-3~1000mm0~360°5μm/m1″测量工作速度可达12m/min轴角编码器绝对式增量式0~360°0~360°10-6/r10-3/r分辨率高,可靠性好霍尔元件线性型开关型±5mm>2m0.5% 1%1%结构简单、动态特性好,分辨率可达1μm,对温度敏感、量程大激光 2m 分辨率0.2μm光纤 0.5~5mm1%~3%0.5%~1%体积小、灵敏度高,抗干扰;量程有限,制造工艺要求高光电±1mm 高精度、高可靠、非接触测量,分辨率可达1μm;缺点是安装不便表9-1中的电容式位移传感器、差动电感式位移传感器和电阻应变式位移传感器,一般用于小位移的测量(几微米~几毫米)。
实验9霍尔效应传感器(直流、交流、测速)在工业生产和科学研究中,经常需要对一些磁性系统或磁性材料进行测量,被测磁场的范围可从~1015-310T (特斯拉),测量所用的原理涉及到电磁感应、磁光效应、热磁效应等。
常用的磁场测量方法有核磁共振法、电磁感应法、霍尔效应法、磁光效应法、超导量子干涉器件法等近十种。
一般地,霍尔效应法用于测量10~104-T 的磁场。
此法结构较简单,灵敏度高,探头体积小、测量方便、在霍尔器件的温度范围内有较好的稳定性。
但霍尔电压和内阻存在一定的温度系数,并受输入电流的影响,所以测量精度较低。
用半导体材料制成的霍尔器件,在磁场作用下会出现显著的霍尔效应,可用来测量磁场、霍尔系数、判断半导体材料的导电类型(N 型或P 型)、确定载流子(作定向运动的带电粒子)浓度和迁移率等参数。
如今,霍尔效应不但是测定半导体材料电学参数的主要手段,而且利用该效应制成的霍尔器件已广泛用于非电量电测、自动控制和信息处理等方面,如测量强电流、压力、转速等,在工业生产要求自动检测和控制的今天,作为敏感元件之一的霍尔器件,将有更为广阔的应用前景。
了解这一富有实用性的实验,对于日后的工作将有益处。
【实验目的】1. 了解霍尔效应产生的机理。
2. 掌握用霍尔器件测量磁场的原理和基本方法。
3. 学习直流激励时霍尔式传感器位移特性及测量方法。
4. 学习交流激励时霍尔式传感器位移特性及测量方法。
5.学习霍尔转速传感器的应用。
【仪器用具】霍尔传感器实验模板、霍尔传感器、直流源、测微头、数显单元,相敏检波、移相、滤波模板、双线示波器,霍尔转速传感器、直流源、转动源(2-24V )、转动源单元。
【实验原理】1. 霍尔效应产生的机理置于磁场中的载流体,如果电流方向与磁场方向垂直,则在垂直于电流和磁场的方向会产生一附加的横向电场,载流体的两侧会产生一电位差,这个现象是美国霍普斯金大学二年级研究生霍尔于1879年发现的,后被称为霍尔效应,所产生的电位差称为霍尔电压。