有限元分析方法第二章弹性力学基础
- 格式:ppt
- 大小:810.00 KB
- 文档页数:65
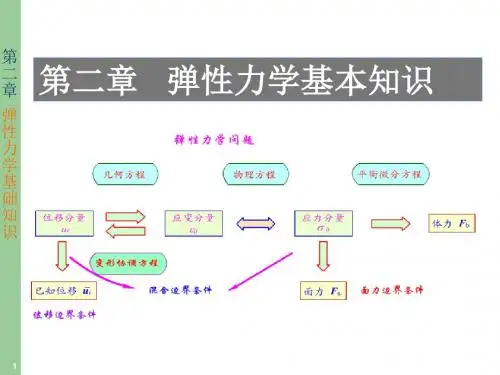
第二章 弹性力学基本理论及变分原理弹性力学是固体力学的一个分支。
它研究弹性体在外力或其他因素(如温度变化)作用下产生的应力、应变和位移,并为各种结构或其构件的强度、刚度和稳定性等的计算提供必要的理论基础和计算方法。
本章将介绍弹性力学的基本方程及有关的变分原理。
§2.1小位移变形弹性力学的基本方程和变分原理在结构数值分析中,经常用到弹性力学中的定解问题及与之等效的变分原理。
现将它们连同相应的矩阵形式的张量表达式综合引述于后,详细推导可参阅有关的书籍。
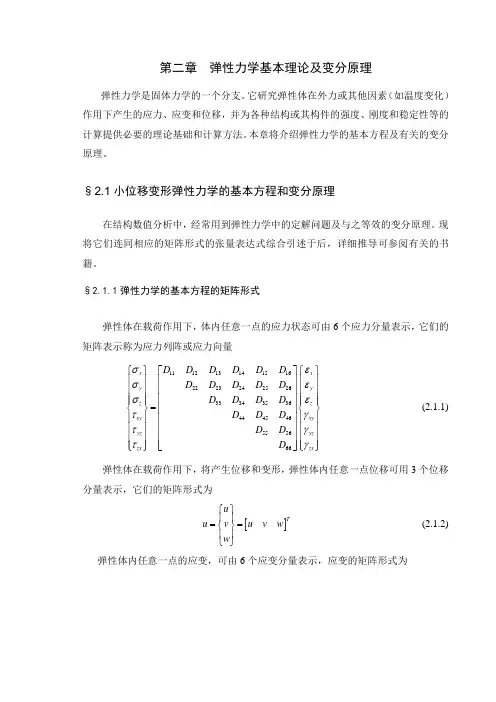
§2.1.1弹性力学的基本方程的矩阵形式弹性体在载荷作用下,体内任意一点的应力状态可由6个应力分量表示,它们的矩阵表示称为应力列阵或应力向量111213141516222324252633343536444546555666x x y y z z xy xy yz yz zx zx D D D D D D D D D D D D D D D D D D D D D σεσεσετγτγτγ⎧⎫⎡⎤⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎪⎪=⎢⎥⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎩⎭⎣⎦⎩⎭ (2.1.1) 弹性体在载荷作用下,将产生位移和变形,弹性体内任意一点位移可用3个位移分量表示,它们的矩阵形式为[]T u u v u v w w ⎧⎫⎪⎪==⎨⎬⎪⎪⎩⎭(2.1.2)弹性体内任意一点的应变,可由6个应变分量表示,应变的矩阵形式为x y Tz xy z xy yz zx xy yz zx εεεσεεεγγγγγγ⎧⎫⎪⎪⎪⎪⎪⎪⎪⎪⎡⎤==⎨⎬⎣⎦⎪⎪⎪⎪⎪⎪⎪⎪⎩⎭(2.1.3)对于三维问题,弹性力学的基本方程可写成如下形式 1 平衡方程0xy x zx x f x y z τστ∂∂∂+++=∂∂∂ 0xy y zy y f xyzτστ∂∂∂+++=∂∂∂0yz zx zz f x y zττσ∂∂∂+++=∂∂∂ x f 、y f 和z f 为单位体积的体积力在x 、y 、z 方向的分量。
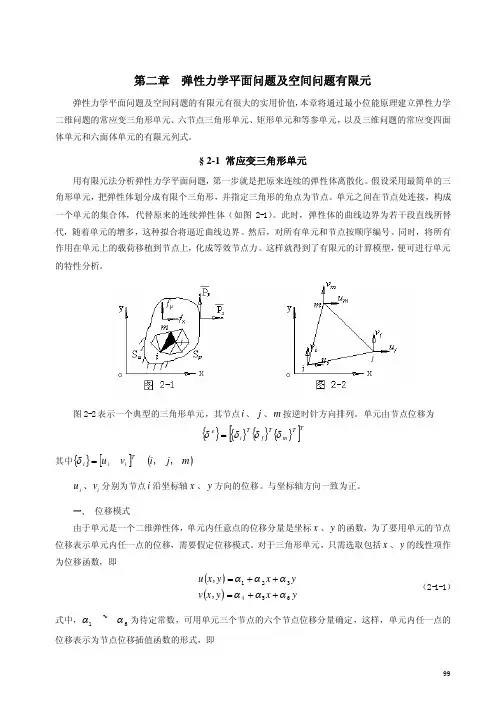

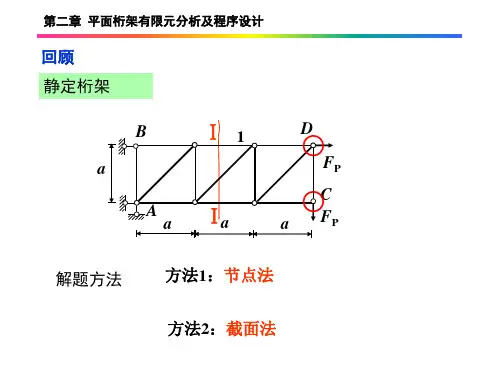
第二章 弹性力学平面问题有限单元法§2-1 三角形单元(triangular Element)三角形单元是有限元分析中的常见单元形式之一,它的优点是:①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。
一、结点位移和结点力列阵设右图为从某一结构中取出的一典型三角形单元。
在平面应力问题中,单元的每个结点上有沿x 、y 两个方向的力和位移,单元的结点位移列阵规定为: 相应结点力列阵为: (式2-1-1)二、单元位移函数和形状函数前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构造)一组在单元内有定义的位移函数作为近似计算的基础。
即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。
构造位移函数的方法是:以结点(i,j,m)为定点。
以位移(u i ,v i ,…u m v m )为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。
在平面应力问题中,有u,v 两个方向的位移,若假定单元位移函数是线性的,则可表示成:(,)123u u x y x y ααα==++546(,)v v x y x y ααα==++ (2-1-2)a{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=m j i m ed d d d m j j i v u v u v u i {}ii j j m X Y X (2-1-1)Y X Y iej m m F F F F ⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪==⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎪⎪⎩⎭式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标)确定。
将3个结点坐标(x i,y i ),(x j,y j ),(x m,y m )代入上式得如下两组线性方程:123i i i u x y ααα=++123j j j u x y ααα=++ (a)123m m m u x y ααα=++和546i i i v x y ααα=++546j j j v x y ααα=++ (b)546m m m v x y ααα=++利用线性代数中解方程组的克来姆法则,由(a)可解出待定常数1α 、2α 、3α :11A Aα=22A Aα=33A Aα=式中行列式:1i i i j j j m m m u x y A u x y u x y =2111i i j j m mu y A u y u y =3111i i j jm mx u A x u x u =2111i i j j m mAx y A x y x y ==A 为△ijm 的面积,只要A 不为0,则可由上式解出:11()2m m i ij j a u a u a u A α=++ 21()2m m i ij j bu b u b u A α=++ (C )31()2m mi i j j c u c u c u A α=++式中:m m i j j a x y x y =- m m j i i a x y x y =- m i j j i a x y x y =-m i j b y y =- m j i b y y =- m i j b y y =- (d )m i j c x x =- m j i c x x =- m j i c x x =-为了书写方便,可将上式记为:m m i j i a x y x y =-m ij by y =- (,,)i j mm i jc x x =-(,,)i j m表示按顺序调换下标,即代表采用i,j,m 作轮换的方式便可得到(d)式。