日本山武定位器种类介绍
- 格式:doc
- 大小:23.50 KB
- 文档页数:2
山武定位器资料汇总
山武定位器是一款高精度GPS定位设备,可广泛应用于汽车、摩托车、船舶等车辆以及宠物、行人等物品的定位追踪。
其主要特点和功能如下:
1. 高精度定位:采用最新的GPS定位技术,能够实现米级精
度的定位,确保定位准确度和稳定性。
2. 实时追踪:可通过手机APP或电脑端软件实时查看目标的
位置,支持历史轨迹回放,方便用户随时随地了解目标的行踪。
3. 多种报警方式:支持多种报警模式,如超速报警、电子围栏报警等,能够及时提醒用户目标的异常行为。
4. 多平台兼容:支持iOS和Android系统的手机APP,同时可以在电脑端通过网页进行操作,方便用户选择合适的设备进行使用。
5. 长续航时间:内置大容量电池,能够长时间续航,不需要频繁充电,保障设备的持续使用。
6. 安全防护:设备具有防水、防震、防丢失等多重安全防护措施,能够适应各种复杂环境下的使用需求。
山武定位器广泛适用于家庭、商业以及工业领域的各种需求,具有较高的市场竞争力和用户满意度。
山武定位器调试及故障处理WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-一、概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
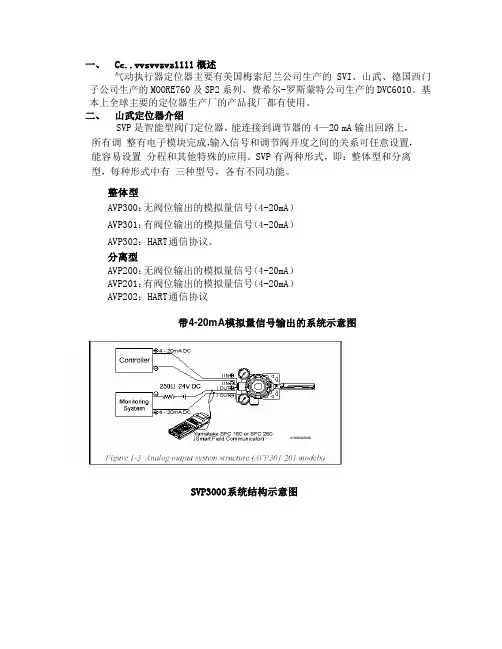
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用SFC手操器、用HART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成SVP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用SFC手操器组态调整Yamatake SFC160/260型智能通信器能用于SVP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见SFC操作手册。
用HART手操器组态调整HART275通讯器能用于AVP302/202型的全部组态、校整、维护。
SVP山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至SVP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
山武阀门定位器自整定方法
标题:山武阀门定位器自整定方法
正文:
阀门定位器是一种用于控制阀门位置的传感器,通常用于自动化控制系统中。
阀门定位器的主要功能是将输入信号转换成精确的阀门位置输出,以确保阀门在正确的位置进行关闭或开启。
山武阀门定位器是一种常见的阀门定位器品牌,其自整定方法被广泛应用于各种自动化系统中。
自整定方法是指利用阀门定位器的特性,通过调整自身的参数来实现对阀门定位器的自动控制。
以下是山武阀门定位器的自整定方法及其拓展:
1. 确定输入信号类型
在山武阀门定位器的自整定过程中,首先需要确定输入信号的类型。
例如,
对于线性阀门定位器,输入信号应为线性信号;对于非线性阀门定位器,输入信号应为非线性信号。
2. 确定自整定范围
自整定方法通常包括两个步骤:一是确定自整定范围,二是确定自整定值。
确定自整定范围是指在确定输入信号类型后,阀门定位器所能输出的精确位置范围。
确定自整定值是指在确定自整定范围后,通过调整阀门定位器的参数,使其输出
位置在自整定范围内。
3. 分析自整定过程
山武阀门定位器的自整定过程通常包括两个步骤:一是输入信号的预处理,
二是输出信号的处理。
输入信号的预处理是指在确定输入信号类型后,对输入信
号进行滤波、去噪等处理,以提高阀门定位器的精度;输出信号的处理是指在确定自整定范围后,通过调整阀门定位器的参数,使其输出信号在自整定范围内。
4. 优化自整定方法
随着技术的发展,阀门定位器的参数调整方式也在不断优化。
例如,可以采用自适应方法、神经网络方法等,以优化自整定方法。



一、Cc..vvsvvzvz1111概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用S FC手操器、用H ART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成S VP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用S FC手操器组态调整Yamatake SFC160/260型智能通信器能用于S VP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见S FC操作手册。
用H ART手操器组态调整HART275通讯器能用于A VP302/202型的全部组态、校整、维护。
SVP 山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至S VP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
3)反馈杆与反馈销成90°。
4)反馈杆与S VP本体用两只六角螺栓固定。
山武定位器原理
山武定位器是一种无线安全系统,通过在房屋、设备和物体上安装可追踪的定位器,提供实时定位功能和报警服务。
它不需要连接到无线电网络,可以监控室内、室外设备和物体的位置。
山武定位器通常包括三个主要部分:发射器、接收器和解调器。
发射器是定位器的核心部分,它将定位信号发射出去,接收器收集发射器发射的信号,解调器将收集的信号解析出位置信息。
发射器由超声波发射模块、脉冲发生器和振荡器组成,超声波发射模块发射规定频率超声波,脉冲发生器产生脉冲,振荡器通过传输信号直接向发射模块发送消息,控制发射模块发射位置信号。
接收器的作用是将发射器发出的位置信号进行收集,它一般由接收模块、频率调节器、滤波器和放大器组成。
其中,接收模块负责监听发射器发出的超声波信号,频率调节器根据发射器发出的频率,调节接收模块进行收发,滤波器和放大器则用于将接收到的信号进行清理并放大。
解调器的工作是将接收器收集到的信号进行解析,然后将获得的位置信息发送到控制系统。
解调器一般由解调模块、微处理器和信号处理模块组成。
其中,解调模块负责将数字信号转换为数字形式,而微处理器和信号处理模块则负责将数字信号解析为有效的位置信息,并发送给控制单元。

株式会社山武SVP3000 Alphaplus智能阀门定位器型号:AVP100/102使用说明书CM4-AVP100-20011版:2005年8月参考英文CM2-AVP100-2001 2版型号AVP100/102-SVP3000 Alphaplus智能阀门定位器i前言ii型号AVP100/102-SVP3000 Alphaplus智能阀门定位器前言型号AVP100/102-SVP3000 Alphaplus智能阀门定位器iii目录第一章:前言1-1 : SVP型号.......................................................................................................................................1-1 1-2 : 通信..............................................................................................................................................1-2 1-2-1: 手动通信...............................................................................................................................1-2 1-2-2: 使用现场智能通信装置(SFC)............................................................................................1-2 1-2-3: 使用HART通信装置.............................................................................................................1-2 1-2-4: HART通信装置(用于AVP102型).....................................................................................1-3 1-3 : SVP示意图....................................................................................................................................1-4第二章:安装2-1 : SVP装配.......................................................................................................................................2-3 2-1-1: 安装SVP反馈杆...................................................................................................................2-3 2-2 : SVP安装步骤................................................................................................................................2-5 2-3 : 气源..............................................................................................................................................2-7 2-4 : SVP初始调整................................................................................................................................2-8 2-5 : 电气接线.......................................................................................................................................2-9 2-5-1: 接线原则...............................................................................................................................2-10 2-5-2: 接线步骤...............................................................................................................................2-10 2-6 : 用于无弹簧双作用执行机构的SVP(双作用放大器)...................................................................2-11 2-6-1: 将双作用放大器安装到SVP上..............................................................................................2-12 2-6-2: 不带过滤减压阀直接安装的双作用SVP................................................................................2-13 2-6-3: 将双作用SVP安装到薄膜执行机构上...................................................................................2-14 2-6-4: 将双作用SVP安装到角行程执行机构上...............................................................................2-14 2-6-5: 自动设定...............................................................................................................................2-15第三章:调整3-1 : 自动设定.......................................................................................................................................3-1 3-1-1: 用开度开关进行自动设定....................................................................................................3-2 3-2 : 零点-量程调整.............................................................................................................................3-3 3-3 : 现场智能通信装置.........................................................................................................................3-5 3-4 : SFC键盘操作................................................................................................................................3-6 3-5 : SFC出错.......................................................................................................................................3-6 3-6 : SFC开始通信................................................................................................................................3-6 3-7 : 用现场智能通信装置进行自动设定和零点-量程调整...................................................................3-7 3-8 : 手动SVP设定...............................................................................................................................3-11 3-9 : 用SFC设定控制信号/阀门开度之间的关系.................................................................................3-14 3-9-1: 示例......................................................................................................................................3-15 3-10 : 确认SVP输入信号、EPM输出和阀门开度输出..........................................................................3-18目录第四章:使用HART 通信装置进行配置4-1 : HART 通信装置的功能...................................................................................................................4-24-2 : 启动通信......................................................................................................................................4-44-3 : 确认和修改一般信息.....................................................................................................................4-64-3-1: 设备信息..............................................................................................................................4-64-3-2: 厂商.....................................................................................................................................4-74-4 : 设备条件.......................................................................................................................................4-84-4-1: 电流输入值 (单位:mA )..................................................................................................4-84-4-2: 输入信号% (百分比) 值 (单位:%)...........................................................................4-84-4-3: 阀门开度 (单位:%).......................................................................................................4-84-4-4: 驱动信号(EPM (电-气转换器模块) 驱动信号) (单位:%)......................................4-84-4-5: 温度 (设备内部温度) (单位:℃)...............................................................................4-84-4-6: 上次配置数据......................................................................................................................4-94-5 : 配置和标定(设备设定和标定)..................................................................................................4-104-5-1: Mode (切换SVP 模式)......................................................................................................4-104-5-2: Input signal range (设定电流输入值)................................................................................4-104-5-3: Valve sys config (阀门系统配置)......................................................................................4-114-5-4: Dynamic chara (动态特性)................................................................................................4-124-5-5: Valve chara (阀门特性)....................................................................................................4-144-5-6: Tvl cut off (开度截止).......................................................................................................4-154-5-7: Calibrate (标定)................................................................................................................4-164-5-8: Diag parameters (诊断参数)............................................................................................4-184-5-9: Burst mode (触发模式)......................................................................................................4-254-6 : 初始设定.......................................................................................................................................4-264-7 : Maintenance (维修)..................................................................................................................4-274-7-1: Dummy input sig (仿真输入信号).....................................................................................4-274-7-2: Dummy drive sig (仿真驱动信号)......................................................................................4-274-7-3: User data save (用户数据保存).........................................................................................4-284-7-4: Correct reset (修正复原)....................................................................................................4-284-8 : Device status (设备状态)............................................................................................................4-294-8-1: Failures (故障)...................................................................................................................4-294-8-2: Notices (提示)...................................................................................................................4-294-8-3: Valve diagnostics (阀门诊断).............................................................................................4-30目录第五章:维修5-1 : 自动/手动选择开关......................................................................................................................5-1 5-1-1: A/M开关的结构..................................................................................................................5-1 5-1-2: 操作步骤...............................................................................................................................5-2 5-2 : 滤网更换和节气喷嘴维修..............................................................................................................5-3 5-3 : 清洁挡板.......................................................................................................................................5-4 5-4 : EPM (电-气转换器模块)平衡调整..........................................................................................5-5 5-5 : 绝缘电阻测试................................................................................................................................5-6 5-5-1: 测试步骤...............................................................................................................................5-6 5-5-2: 判定标准...............................................................................................................................5-6 5-6 : 使用带增幅器的SVP时的调整步骤...............................................................................................5-7 5-7 : 默认内部数据值表.........................................................................................................................5-8 5-8 : SVP 内部方框图和SVP I/O流程图.................................................................................................5-9第六章:故障排除6-1 : 故障排除.......................................................................................................................................6-1 6-1-1: 使用SFC...............................................................................................................................6-1 6-1-2: 使用HART通信装置.............................................................................................................6-2 6-1-3: 一般故障排除方法................................................................................................................6-2插图列表图 1-1概况.............................................................................................................................1-1图 1-2山武现场智能通信装置.................................................................................................1-2图 1-3HART 通信结构.............................................................................................................1-3图 1-4SVP 示意图...................................................................................................................1-4图 2-1SVP 反馈杆...................................................................................................................2-3图 2-2SVP 最大动作范围........................................................................................................2-4图 2-3....................................................................................................................................2-4图 2-4....................................................................................................................................2-5图 2-5....................................................................................................................................2-6图 2-6....................................................................................................................................2-7图 2-7....................................................................................................................................2-8图 2-8....................................................................................................................................2-9图 2-9....................................................................................................................................2-11图 2-10双作用放大器已安装到SVP 上.....................................................................................2-12图 2-11不带过滤减压阀直接安装的双作用SVP........................................................................2-13图 3-1....................................................................................................................................3-3图 3-2....................................................................................................................................3-4图 3-3....................................................................................................................................3-14图 3-4....................................................................................................................................3-14图 3-5....................................................................................................................................3-15图 3-6流量特性概况...............................................................................................................3-16图 4-1HART 通信装置.............................................................................................................4-1图 4-2HART 通信结构.............................................................................................................4-5图 4-3.....................................................................................................................................4-15图 4-4强制全开值和强制全关值.............................................................................................4-15图 5-1A/M 开关的结构...........................................................................................................5-1图 5-2从自动(正常)操作状态切换到手动操作状态...........................................................5-2图 5-3从手动操作状态切换到自动操作状态...........................................................................5-2图 5-4A/M 开关......................................................................................................................5-3图 5-5EPM 平衡调整..............................................................................................................5-4图 5-6EPM 平衡调整..............................................................................................................5-5图 5-7SVP 方框图...................................................................................................................5-9图 5-8SVP I/O 流程图.............................................................................................................5-10插图列表各部分说明1-2 :通信有三种与SVP 通信的方法:手动;使用现场智能通信装置(SFC );或使用HART 通信装置。
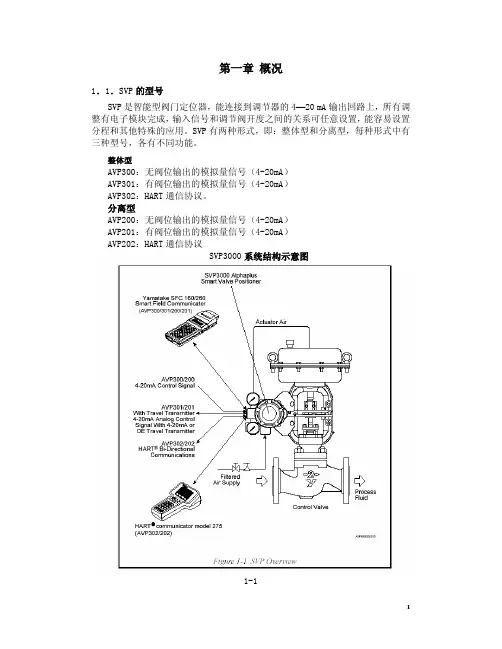
第一章概况1.1.SVP的型号SVP是智能型阀门定位器,能连接到调节器的4—20 mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议SVP3000系统结构示意图1-11.2.系统结构无阀位输出的定位器。
(型号:AVP300和AVP200)无阀位输出的系统示意图1-2有阀位输出的定位器(型号:AVP301和AVP201)模拟量输出:SVP模拟量信号直接输出到监控系统。
带4-20mA模拟量信号输出的系统示意图1-31.3.组态SVP有三种组态方法,即:手动旋钮、用SFC手操器、用HART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成SVP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用SFC手操器组态调整Yamatake SFC160/260型智能通信器能用于SVP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见SFC操作手册。
用HART手操器组态调整HART275通讯器能用于AVP302/202型的全部组态、校整、维护。
SVP具体通信功能详见HART通信器操作手册1.4.SVP的结构和功能主要组成部分整体型(AVP300/301/302)1-7主要部件名称和功能主要部件一览表部件说明本体电子控制模块、EPM(电气转换模块)、VTD(阀位传感器)气动放大器放大来自EPM的气信号,经转换后输入到执行机构反馈杆把开度信号传送至VTD手/自动开关在手动和自动之间进行气信号输出的切换外部零位/满度调整开关在不用SFC的情况下,用一把螺丝刀能完成零位满度的调整和各参数的自动整定气源压力表指示供气压力输出气源压力表指示输出气源压力安装支架(任选)不同型号的执行机构有不同形式气源输入口供气气源连接至“SUP”接口输出气源口与执行机构气源入口相连双作用放大器在双作用执行机构上使用,双作用放大器连接在SVP的输出口,它有两个输出,OUT1是SVP输出气源,OUT2是压力平衡气源,分别与双气缸的两个气源口相连,使气缸活塞处于一定位置阀位检测器通过反馈杆传送阀位反馈电缆连接VTD和SVP本体第二章安装2.1.安装要求1)环境温度范围:根据防爆要求2)相对湿度: 10%--90%3)安装处温度和湿度无剧烈变化4)电磁场:≤400A/m(避免附近有大变压器,高频炉等)5)振动低于19.6m/s2(5—400Hz) (AVP300/301和AVP200/201本体)6)振动低于98m/s2(5—2000Hz) (AVP200/201阀位检测器)2.2.整体型SVP的安装(A VP300/301/302)山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
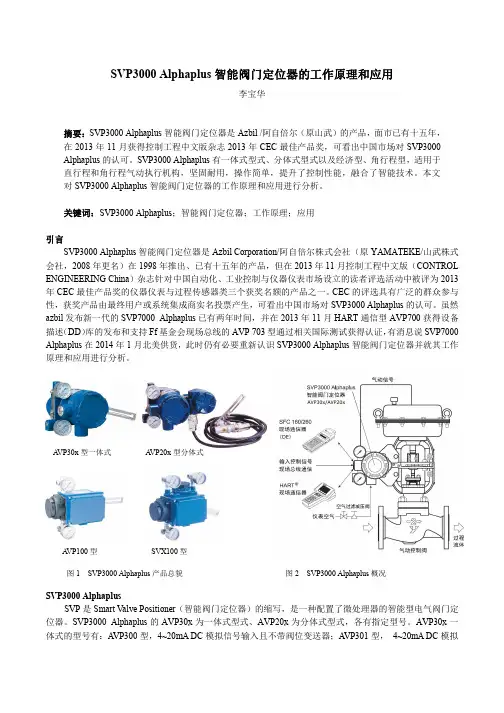
SVP3000 Alphaplus 智能阀门定位器的工作原理和应用李宝华摘要:SVP3000 Alphaplus 智能阀门定位器是Azbil /阿自倍尔(原山武)的产品,面市已有十五年,在2013年11月获得控制工程中文版杂志2013年CEC 最佳产品奖,可看出中国市场对SVP3000 Alphaplus 的认可。
SVP3000 Alphaplus 有一体式型式、分体式型式以及经济型、角行程型,适用于直行程和角行程气动执行机构,坚固耐用,操作简单,提升了控制性能,融合了智能技术。
本文对SVP3000 Alphaplus 智能阀门定位器的工作原理和应用进行分析。
关键词:SVP3000 Alphaplus ;智能阀门定位器;工作原理;应用引言SVP3000 Alphaplus 智能阀门定位器是Azbil Corporation/阿自倍尔株式会社(原YAMATEKE/山武株式会社,2008年更名)在1998年推出、已有十五年的产品,但在2013年11月控制工程中文版(CONTROL ENGINEERING China )杂志针对中国自动化、工业控制与仪器仪表市场设立的读者评选活动中被评为2013年CEC 最佳产品奖的仪器仪表与过程传感器类三个获奖名额的产品之一。
CEC 的评选具有广泛的群众参与性,获奖产品由最终用户或系统集成商实名投票产生,可看出中国市场对SVP3000 Alphaplus 的认可。
虽然azbil 发布新一代的SVP7000 Alphaplus 已有两年时间,并在2013年11月HART 通信型AVP700获得设备描述(DD )库的发布和支持Ff 基金会现场总线的AVP 703型通过相关国际测试获得认证,有消息说SVP7000 Alphaplus 在2014年1月北美供货,此时仍有必要重新认识SVP3000 Alphaplus 智能阀门定位器并就其工作原理和应用进行分析。
SVP3000 AlphaplusSVP 是Smart V alve Positioner (智能阀门定位器)的缩写,是一种配置了微处理器的智能型电气阀门定位器。
日本山武定位器种类介绍(一)A VP3000 Alphaplus系列电/气智能阀门定位器A VP3000 Alphaplus是基于微处理器技术上的智能型电/气阀门定位器。
其接受控制器传送的直流信号控制阀门的开度。
除此功能外,A VP3000 Alphaplus具有现场通讯,自动组态、自我诊断功能,极大提高工厂的生产效率。
其主要类型有:1、A VP100型电/气智能阀门定位器2、A VP102型电/气智能阀门定位器(HART协议)3、A VP300型电/气智能阀门定位器4、A VP301型电/气智能阀门定位器(带开度信号变送)5、A VP302型电/气智能阀门定位器(HART协议)6、A VP200型分离式电/气智能阀门定位器7、A VP201型分离式电/气智能阀门定位器(带开度信号变送)A VP200/ AVP201是配置了微处理器的智能阀门定位器,开度传感器与定位器本体分离,传感器安装在阀门上,定位器本体安装在别处,中间用电缆连接(电缆长度最大20米)。
安装在阀上的开度传感器可承受比常规的电/气定位器高5倍的震动。
(二)SVP3000 Alphaplus系列A VP303型现场总线型智能阀门定位器SVP3000 Alphaplus系列A VP303型智能阀门定位器是基于现场总线通讯协议的智能阀门定位器。
A VP303型智能阀门定位器通过现场总线协议控制并管理阀门。
其能实现多种自诊断、自整定功能以及PID功能模块,体现了现场总线的优势。
(三)HEP电/气阀门定位器HEPP电/气阀门定位器与调节阀配套使用,把调节器输出的电信号转换成驱动调节阀的气信号,同时根据调节阀的开度进行位置反馈,使调节阀能够正确定位,它分单双作用两种形式。
具体型号为:HEP15/16/17(单作用电/气阀门定位器),HEP25/26/27(双作用电/气阀门定位器)。
其特点如下:1、继动器容量大,耗气量小,稳定性好,灵敏度高;2、电磁组件精度高;3、调整和维修可在工作状态下直接进行;4、磁体采用高储能积的稀土材料制造,电流通过弹性元件输入,不用引线。
山武SVP3000 Alphapluus智能阀门定位器调校方法(一)调整(18MA输入,顺时针旋转开关,保持3秒,就自整定了)2 P2 h4 f$ L: L1 g; G 自动设定是一种独特的程序,可用来自动进行定位器的各种调整。
用开度开关进行自动设定,执行自动设定和零点-量程调整时需要对定位器进行观察。
开度按钮用来启动自动设定和进行手动零点-量程标定,步骤:; C! K# a I [/ y4 J1. 将定位器的输入信号设定为DC 18±1mA;2. 打开SCP的前盖,按住开度按钮到“UP”位置(对于Flowing Rotary VFR阀门为“DOWN”);) w4 t5 f7 C7 p4 m# f3. 按住此按钮,直到阀门开始动作(约3秒),将启动自动设定程序,松开此按钮;4. 阀门从全关到全开往返两次。
之后,阀门开启到50%的位置,并保持3分钟;& T' R, l1 S( B4 U5. 通过改变输入信号确认自动设定程序已经完成。
整个自动设定过程约需3分钟;注:执行自动设定过程中,请勿将输入型号设定到4mA以下。
(只要信号在4-20mA范围内,自动设定过程中改变输入信号不会影响程序的执行。
)如果输入信号跌倒4mA以下,则自动设定将无效,且必须重新开始。
自动设定完成后,信号维持在至少4mA的水平,并至少保持30秒钟,以确保数据和参数被保存到SVP内存中。
操作结束后,通过改变输入信号检查阀门的动作,并确认阀门是否移到与信号相对应的正确位置。
如满度位置发生偏移,再执行满度调整。
! i! Q0 J F9 J& Z5 ^6 J" T( N/ y$ ?(二)零点-量程调整自动设定后,定位器已将其自身标定到阀门的全关(零点)和全开(量程)值。
如果阀门不能获得其开度与定位器控制信号之间的正确关系,则按以下步骤手动调整零点-量程。
& Z' T' \" y: N0 F注:只有关闭和全开输入信号(例:4-20)与储存在定位器中的,或工厂中设定于定位器中的关闭和全开输入信号设定相同,开度开关才会工作。
一、概述气动执行器定位器主要有美国梅索尼兰公司生产的SVI、山武、德国西门子公司生产的MOORE760及SP2系列、费希尔-罗斯蒙特公司生产的DVC6010。
基本上全球主要的定位器生产厂的产品我厂都有使用。
二、山武定位器介绍SVP是智能型阀门定位器,能连接到调节器的4—20mA输出回路上,所有调整有电子模块完成,输入信号和调节阀开度之间的关系可任意设置,能容易设置分程和其他特殊的应用。
SVP有两种形式,即:整体型和分离型,每种形式中有三种型号,各有不同功能。
整体型AVP300:无阀位输出的模拟量信号(4-20mA)AVP301:有阀位输出的模拟量信号(4-20mA)AVP302:HART通信协议。
分离型AVP200:无阀位输出的模拟量信号(4-20mA)AVP201:有阀位输出的模拟量信号(4-20mA)AVP202:HART通信协议带4-20mA 模拟量信号输出的系统示意图SVP3000系统结构示意图SVP有三种组态方法,即:手动旋钮、用S FC手操器、用H ART手操器。
手动旋钮组态调整:只用一把螺丝刀就能完成S VP的内部组态,包括自整定、行程调整、调节阀的特性检测、零位/满度的调整。
用S FC手操器组态调整Yamatake SFC160/260型智能通信器能用于S VP的全部参数组态、调整、SVP的维护。
SVP的具体通信功能详见S FC操作手册。
用H ART手操器组态调整HART275通讯器能用于A VP302/202型的全部组态、校整、维护。
SVP 山武智能定位器适用于直行程和角行程的执行机构,重量约2.5kg。
安装方式与普通定位器相同。
安装步骤:1)先用两只内六角螺钉把安装板固定至S VP上,拧紧螺钉,并把定位器固定于调节阀执行机构上。
2)把执行机构上的反馈销穿进定位器反馈杆开孔内。
3)反馈杆与反馈销成90°。
4)反馈杆与S VP本体用两只六角螺栓固定。
保证反馈杆旋转角最大为±20°,如超过角度,SVP不能操作。
山武阀门定位器自整定方法
山武阀门定位器是一种用于控制阀门运动的高精度定位器,广泛应用于航空航天、化工、石油、电力等领域。
自整定方法是山武阀门定位器中的一种重要技术,可以帮助用户实现对阀门的定位控制。
具体来说,山武阀门定位器的自整定方法包括以下步骤:
1. 确定阀门的初始位置和目标位置,通常通过手动或自动执行器进行定位。
2. 计算山武阀门定位器的输出信号,通常通过软件算法进行计算。
3. 根据输出信号进行阀门的控制,直到达到目标位置。
在自整定过程中,需要注意以下几个问题:
1. 初始位置和目标位置的选择需要根据阀门的特性和运动规律进行优化。
2. 计算算法需要根据阀门的特性和运动规律进行优化,以确保输出信号的准确性。
3. 自整定方法需要根据实际情况进行多次迭代,直到达到理想的定位精度。
自整定方法是山武阀门定位器中的一种重要技术,可以帮助用户实现对阀门的定位控制。
在实际应用中,需要注意算法的优化和迭代次数的控制,以提高定位精度和稳定性。
使用HART 通信协议的智能阀门定位器AVP302型SVP3000 Alphaplus AVP302型是一种电-气动智能阀门定位器。
SVP3000 Alphaplus 接收来自控制设备的DC 电流信号并控制气动阀门。
除了基本功能以外,SVP3000Alphaplus 还具有通信功能、自动设定程序以及自诊断功能,极大地提高了生产力和效率。
使用HART 通信装置可执行校准、设定和自诊断。
使用方便•自动设定自动设定功能是一种全自动配置程序,可指定执行机构和调整阀门的零点和量程。
您可使用外部开关方便地打开该程序,因此即使在危险地区也可迅速安全地执行阀门调整。
阀门诊断(软件版本3.A 或更新)通过HART 通信装置或调节阀维护支持系统“Valstaff ”可对下列参数进行监控。
•咬卡•总行程•开度直方图•周期计数•关闭计数•最大开度速度概 述特 点高可靠性•阀座密封如果输入信号低于之前设定的水平,阀座紧密密封功能将完全关闭阀门。
这样就增强了阀门的完全关闭能力。
•自诊断用户使用自诊断功能可随时检查定位器的状态并在发生故障时发出警报。
单一型号适用于多种规格您可在不更换任何部件的情况下更改SVP Alphaplus 的设定。
对单个型号进行设定修改即可适合各型号规格的调节阀。
•输入范围:可设定为任何量程值以进行分程。
•流量特性:线性、等百分比、快开或自定义用户特性•执行机构类型:双作用或单作用型执行机构(需要选购的双作用放大器)HART 通信可使用275型HART 通信装置进行校准、设定和自诊断。
SS4-AVP302-0100 (2版)山武公司适用的执行机构•单作用和双作用型执行机构•直行程和角型行程执行机构认 证JIS隔爆认证Ex d IIC T6 认证 No.C16388FM防爆认证防 爆:I级,1类,A、B、C、D组粉尘防爆:II级,1类,E、F、G组适 用:III级,1类隔 爆:I级,1区,AEx d IIC T6在环境温度< 80°C下认证号3001246安装时需要遵循国家电子委员会的规定。
日本山武定位器种类介绍
(一)A VP3000 Alphaplus系列电/气智能阀门定位器
A VP3000 Alphaplus是基于微处理器技术上的智能型电/气阀门定位器。
其接受控制器传送的直流信号控制阀门的开度。
除此功能外,A VP3000 Alphaplus具有现场通讯,自动组态、自我诊断功能,极大提高工厂的生产效率。
其主要类型有:
1、A VP100型电/气智能阀门定位器
2、A VP102型电/气智能阀门定位器(HART协议)
3、A VP300型电/气智能阀门定位器
4、A VP301型电/气智能阀门定位器(带开度信号变送)
5、A VP302型电/气智能阀门定位器(HART协议)
6、A VP200型分离式电/气智能阀门定位器
7、A VP201型分离式电/气智能阀门定位器(带开度信号变送)
A VP200/ AVP201是配置了微处理器的智能阀门定位器,开度传感器与定位器本体分离,传感器安装在阀门上,定位器本体安装在别处,中间用电缆连接(电缆长度最大20米)。
安装在阀上的开度传感器可承受比常规的电/气定位器高5倍的震动。
(二)SVP3000 Alphaplus系列A VP303型现场总线型智能阀门定位器
SVP3000 Alphaplus系列A VP303型智能阀门定位器是基于现场总线通讯协议的智能阀门定位器。
A VP303型智能阀门定位器通过现场总线协议控制并管理阀门。
其能实现多种自诊断、自整定功能以及PID功能模块,体现了现场总线的优势。
(三)HEP电/气阀门定位器
HEPP电/气阀门定位器与调节阀配套使用,把调节器输出的电信号转换成驱动调节阀的气信号,同时根据调节阀的开度进行位置反馈,使调节阀能够正确定位,它分单双作用两种形式。
具体型号为:HEP15/16/17(单作用电/气阀门定位器),HEP25/26/27(双作用电/气阀门定位器)。
其特点如下:
1、继动器容量大,耗气量小,稳定性好,灵敏度高;
2、电磁组件精度高;
3、调整和维修可在工作状态下直接进行;
4、磁体采用高储能积的稀土材料制造,电流通过弹性元件输入,不用引线。
(四)HTP型单作用气动阀门定位器
HTP阀门定位器除改善调节阀的静、动态特性外,对改变执行机构的分程动作,正反作用以及改变调节阀的流量特性等,从而满足各种工艺控制要求。
具体型号为:其特点如下:1、采用大口径的继动器,结构简单从而消除了气源通道堵塞故障,大大提高了调节阀的动作速度。
2、灵敏度高,性能稳定,抗震性强。
3、结构简单,坚固,维修方便。
4、改变定位器的作用方式,不需要更换部件,而且不管执行结构的正反作用如何很容易实现。
(继动器发转180度,反转凸轮即可)。
5、定位器的部件采用了防腐蚀性材料,从而增强了耐环境性,适用于工作条件比较恶劣的场合。
(五)双作用气动阀门定位器VPP07/08型
VPP07/08型是高供给气压用的单作用气动阀门定位器,该定位器与调节阀配套,它根据调节器的输出信号,给调节器的执行机构气室输出供气压力,通过力平衡伺服机构使调节阀的开度正确迅速定位。
其特点为:
1、结构简单坚固,调校、维修方便。
2、通过更换凸轮改变发的流量特性。
3、定位器的部件采用了防腐蚀性材料从而增强了耐环境性,适用于工作条件比较恶劣的场合。
(六)双作用气动阀门定位器VPP02/03型
VPP02/03型是用于向调节阀提供供气压力的气动阀门定位器,该定位器与调节阀配套,它根据调节器的输出信号,给调节器的双作用执行机构气室输入供气压力,通过力平衡伺服机构,使调节阀的开度正确迅速定位。
其特点为:
1、适用于从低压到高压的大范围气源压力;
2、结构简单坚固,调校、维修方便;
3、更改双作用型执行机构(带定位器)的动作,不需要更换部件(仅需改装一下定位器与执行机构相连的空气配管,反转一下凸轮即可);
4、定位器的安装位置与执行机构的正反作用无关;
5、定位器的部件采用了防腐蚀性材料从而增强了耐环境性,适用于工作条件比较恶劣的场合。