形位误差的评定与检测(陈丙三)
- 格式:ppt
- 大小:4.45 MB
- 文档页数:33

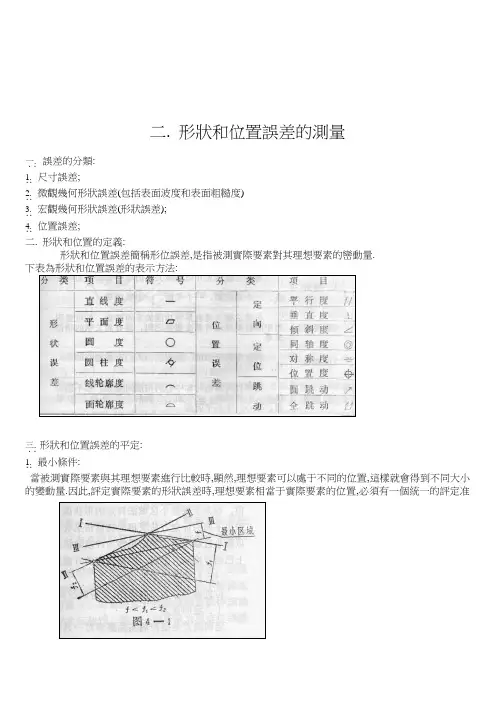
二. 形狀和位置誤差的測量一...誤差的分類:1...尺寸誤差;2...微觀幾何形狀誤差(包括表面波度和表面粗糙度)3...宏觀幾何形狀誤差(形狀誤差);4...位置誤差;二. 形狀和位置的定義:形狀和位置誤差簡稱形位誤差,是指被測實際要素對其理想要素的巒動量.三...形狀和位置誤差的平定:1...最小條件:當被測實際要素與其理想要素進行比較時,顯然,理想要素可以處于不同的位置,這樣就會得到不同大小的變動量.因此,評定實際要素的形狀誤差時,理想要素相當于實際要素的位置,必須有一個統一的評定准則,這個准則就是“最小條件”.是指被測實際要素對其理想要素的最大變動量為小.2. 形狀誤差的評定:形狀誤差數值的大小用最小包容區域:按最小區域法評定的形狀誤差值為最小,它最有利于通過合格的被測件.但在滿足零件功能要求的前提下,也允許采用近似方法來評定形狀誤差,如評定給定平面內直線度誤差時,常采用兩端點連線作為理想直線進行評定.羨定平面度誤差時,常以最遠三點建立的理想平面,或通過一條對角線而平行于另一條對角線建立的理想平來評定.通常采用近似方法評定的形狀誤差值,均大于按最小區域法評定的結果作為促裁的依據.若被檢單位提供測量方法則按要求測量.如3.位置誤差的評定3.1 定向誤差定向誤差是指被測實際要素對一具有確定方向的理想要素的變動量,理想要素的方向由基准確定.評定定向誤差時,對于輪廓要素,其理想要素應在被測要的實體之外與其接觸,且在保持與基准確定方向的前提下應使被測實際要素對其理想要素的最大變動量為最小.如圖所示為兩面的平行度誤差,平行度誤3.2定位誤差定位誤差是指被測實際要素對一具有確定位置的理想要素的變動量.理想要素的位置由基准和理論正確尺確定.定位誤差值用定位最小包容區域(簡稱定位最小區域)的寬度或直徑表示.定位最包容小區域是指以理想要素定位來包容被測實際要素時,具有最小寬度f直徑Φf的包容區域.如下左圖為最小寬度的誤差,右圖為最小直徑的誤差:“注意”在測量定向,定位誤差時,為使基准上的形狀誤差中去,基准要素取理想要素狀態,所以在基准要素上要排除形狀誤差.而在被測要素上是不排除表面形狀誤差的.3.3 跳動誤差跳動誤差分為圓跳動誤差和全跳動誤差.3.3.1圓跳動誤差是被測實際要素繞基准軸線作無軸向移動回轉一周時,由位置固的指示器在給定方向上測得最大與最小讀數之差. 圓跳動誤差又分為徑向圓跳動誤差,端面圓跳動誤差和斜向圓跳動誤差.下面左,中,右三個圖分別為徑向圓跳動誤差,端面圓跳動誤差和斜向圓跳動誤差全跳動誤差是在整個被測要素范圍內的跳動.當被測實際要繞基准軸線作無軸向移坳回轉,同時指示器沿理想母線連續移動(或被測實際要素每回轉一周,指示器沿理想母線作間斷移動),由指示器在給定方向上測得的最大與最小讀數之差.全跳動誤差分為徑向全跳動誤差和端面全跳動誤差.一...直線度誤差的測量 直線度誤差是“被測實際線對理想直線的巒動量”從這一定義中可以看出,要測量直線度誤差,除有被測實際線外,還必須有一個可看作理想直線的“標准直線”,二者以一定的方法進行比校后,才能得到變動量.1...1檢測原理: 直線度誤差的檢測一般可采用“與理想要素比校原理”,“測量特征參數原理”和“控制實效邊界原理”等1...2測量方法: a打表法,如下圖:1.2 b 光隙法或墊塞法 ,如下圖:另外還有許多測量方法如:幹涉法,張絲法,節距測量法,三點法,互比法,測量特征參數法(對于軸線的直線度誤差常采用測量特征數法2...直線度誤差的評定和測量數據處理 直線度誤差可按兩種法進行評定:一種是兩端點連線法,另一種是最小區域法.當被測截面的誤差呈凸形或凸形時,兩種評定法評結果相同;當被測截面的誤差曲線呈波浪形時,兩種評定法評定結果則不相同.用兩端連線法評定合格的被測件,用最小區域法評定也一定合格.如果對評定結有爭議時,應以最小區域法作為仲裁的依據.直線度誤差分為給定平面內,給定方向上和任意方向三種情況.在評定時可將被測實際線投影到垂直于兩平行平面的投影面上,這樣就可按給定平面內的直線度誤差來評左圖為兩端點連線法評定的直線度誤差,右圖為按最小區域法評定直線度誤差.右圖是將整個誤差折線圖最外圍的那些點連接成封閉多邊形oabdce,從中找出極值點至!封閉線的最大縱坐標距離CC’=6um,就是按最小區域法評定的直線度誤差.二...平面度誤差的測量 1...平面度誤差的測量方法獲得平面面度誤差的原始數據可以將被測表面與一基准平面如平晶,平反,水平面,光束掃描平面等進行比較而得到; 也可以分別測出各截面內各測點的直線度誤差,然后換算為對同一平面的數值,再進行平面度誤差的評定.前一類測量方法叫作統一基准法,后一類測量方法叫作誤差聯系法.1...1統一基准法有:a.幹涉法 b.平板法 三...平面度誤差的評定 3.1三點法: 是選取被測表面上相距最遠的三點,通過這三作一理想平面,以此平面做為評定基准.由于決定理想平面的三點,可以有多種取法,因此理想平面的位置隨取點的不同而異,進而造成評定出的平面度誤差值也就不唯一.按三點法評定出的平面度誤差值一般比其它的方法評定的值大.3.2 對角線法: 是通過實際被測表面上一條對角經,且平行于另一條對角線而決定一理想平面,以此平面作為評定平面度誤差的評定基准.3.3 最小區域法: 包容實際表面且距離為最小的兩平行平面間的距離f.可以以下三條准則進行判斷: 3.3.1三角形准則如圖所示,在被測平面度誤差值的示意圖中,當兩平行平面之一與至少三個等值最高(低)點相切,另一平面與至少一個最低(高)點相切,且該最低(高)點的投影落在由三等最高(低)點所組成的三角形之內時(包括落在邊線上)此兩包容面符合最小條件,兩包容面符合最小條件,兩包容面之間的區域即為最小包容區域,兩包容面之間的距離即為平面度誤差值.3.3.2交叉准則:如圖所示在被測面的平面度誤差示意圖中,當兩平行平面之一與至少兩等值最高(低)點相切,另一平面與至少兩等值最低(高)點相切,且前兩點連線的投影與后兩點連線相互交叉時,此兩包容平面符合最小條件,兩包容平面之間的區域為最小包容區域,此兩包容平面之間的距離即為平面度誤差值.此准則適用于判斷鞍形表面.3.3.2直線准則:如圖4-66 所示.在被測面的平面度誤差示意圖中,當兩平行平面之一與至少一個最高(低)點相切,且該最高(低)點的投影處於兩等值最低(高)點的連線上時,此兩包容平面之間的區域即為最小包容區域.此兩包容平面之間的距離即為平面度誤差值.此准則運用于判斷某截面的直線度誤差恰為該表面的平面度誤差.四. 圓度誤差的測量1.圓度誤差的定義為:包容同一橫剖面實際輪廓,且半徑差為最小的兩同心圓間的距離“f”2.圓度誤差的特點: 圓度誤差的量值大小反映在圓周半徑方向上,這是圓度誤差的第一個幾何特性,即誤差具有徑向性.圓度誤差的第二個幾何特性是圓度誤差變化具有“周期性”因為回轉體零件橫截面的實際輪廓形狀是一個復雜的封閉曲線,輪廓上各點徑向誤差的大小不同,而且在圓周的一圈上以2π為周期隨機變化.3.圓度誤差的評定圓度誤差是根據從一特定圓心算起,以包容記錄圖形兩同心圓的最大和最小半徑差來確定.這一特定圓心的位置不同,半徑差的數值也就不同.4.測量方法有:1.最小區域法,2,最小二行乘法,3.最小外接圓法,4.最大內切圓法最小區域法:判斷的准則是用兩同心圓去包容實際輪廓,在包容時,必須要有兩個外接點交和兩個內接點交替發生,但不一定連續發生.如下圖:五. 位置誤差的測量一. 平行度誤差:是被測實際要素對理想要素的變動量,理想要素與基准要素平行.平行度誤差的評定1...評定面對面平行度誤差的最小包容區域是用平行于基准的兩平行平面包容被測要素,且至少有兩個,一個為最低點,2...評定線對面的平行度誤差的最小包容區域,也是用平行于基准的兩平行平面包容實際線,這時被測要素上至少有兩個點與兩平行平面接觸,一個為最高點,一個為最低點,3...評定面對線平行度誤差的最小包容區域是用平行于基准的兩平行平面包容實際面,這時被測面上至少有兩或點三點與與該兩平行平面接觸,且在垂直,于斟准直線的平面上的投影.。

第六节形位误差的评定及检测一、形位误差的评定1.形状误差的评定1)最小条件评定形状误差的基本原则是“最小条件”:即被测实际要素对其理想要素的最大变动量为最小。
(1) 轮廓要素(线、面轮廓度除外)最小条件就是理想要素位于实体之外与实际要素接触,并使被测要素对理想要素的最大变动量为最小。
(2) 中心要素最小条件:就是理想要素应穿过实际中心要素,并使实际中心要素对理想要素的最大变动量为最小。
Ⅰ最小区域f 1Ⅱ被测实际要素Ⅲ图4-24 轮廓要素的最小条件L2被测实际要素d1L12图4-25中心要素的最小条件2)最小包容区(简称最小区域)最小包容区(简称最小区域):是指包容被测实际要素时,具有最小宽度f或直径 f的包容区域。
形状误差值用最小包容区(简称最小区域)的宽度或直径表示。
按最小包容区评定形状误差的方法,称为最小区域法。
最小条件是评定形状误差的基本原则,在满足零件功能要求的前提下,允许采用近似方法评定形状误差。
当采用不同评定方法所获得的测量结果有争议时,应以最小区域法作为评定结果的仲裁依据。
被测实际要素SSa) 评定直线度误差图4-26 最小包容区示例被测实际要素被测实际要素SSc) 评定平面度误差b) 评定圆度误差2.定向误差的评定定向误差值用定向最小包容区域(简称定向最小区域)的宽度或直径表示。
定向最小包容区域是按理想要素的方向来包容被测实际要素,且具有最小宽度f或直径 f的包容区域。
S被测实际要素基准图4-27 定向最小包容区域示例被测实际要素S被测实际要素基准S基准α图4-27 定向最小包容区域示例3.定位误差的评定评定形状、定向和定位误差的最小包容区域的大小一般是有区别的。
如图4-29所示,其关系是:f 形状< f 定向< f 定位当零件上某要素同时有形状、定向和定位精度要求时,则设计中对该要素所给定的三种公差(T 形状、T 定向和T 定位)应符合:T 形状<T 定向<T 定位基准A被测实际要素FSLh 1PP S基准AOL yL x基准Bf图4-28 定位最小包容区域示例HAAAt1t2t3a) 形状、定向和定位公差标注示例:t1 < t2 < t3AHf形状b) 形状、定向和定位误差评定的最小包容区域:f形状< f定向< f定位图4-29 评定形状、定向和定位误差的区别f定向f定位二、形位误差的检测原则1.与理想要素比较原则与理想要素比较原则是指测量时将被测实际要素与其理想要素作比较,从中获得数据,以评定被测要素的形位误差值。
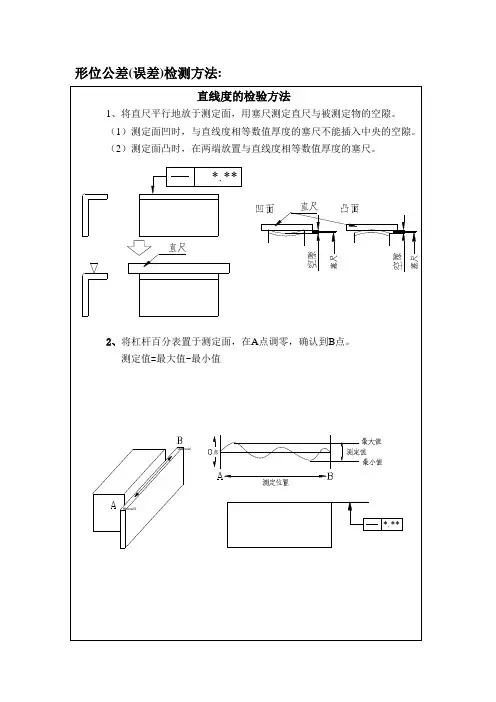
形位误差的检测(1)直线度误差的测量常用方法有:指示器法、刀口尺法、钢丝法、水平仪法、自准直仪法。
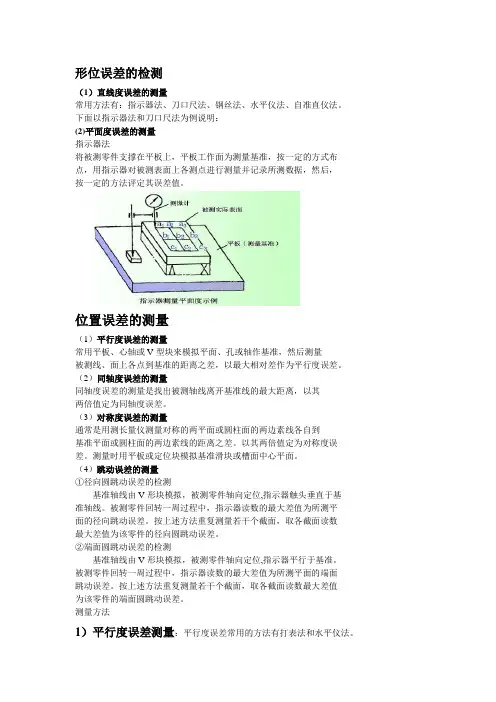
下面以指示器法和刀口尺法为例说明:(2)平面度误差的测量指示器法将被测零件支撑在平板上,平板工作面为测量基准,按一定的方式布点,用指示器对被测表面上各测点进行测量并记录所测数据,然后,按一定的方法评定其误差值。
位置误差的测量(1)平行度误差的测量常用平板、心轴或V型块来模拟平面、孔或轴作基准,然后测量被测线、面上各点到基准的距离之差,以最大相对差作为平行度误差。
(2)同轴度误差的测量同轴度误差的测量是找出被测轴线离开基准线的最大距离,以其两倍值定为同轴度误差。
(3)对称度误差的测量通常是用测长量仪测量对称的两平面或圆柱面的两边素线各自到基准平面或圆柱面的两边素线的距离之差。
以其两倍值定为对称度误差。
测量时用平板或定位块模拟基准滑块或槽面中心平面。
(4)跳动误差的测量①径向圆跳动误差的检测基准轴线由V形块模拟,被测零件轴向定位,指示器触头垂直于基准轴线。
被测零件回转一周过程中,指示器读数的最大差值为所测平面的径向跳动误差。
按上述方法重复测量若干个截面,取各截面读数最大差值为该零件的径向圆跳动误差。
②端面圆跳动误差的检测基准轴线由V形块模拟,被测零件轴向定位,指示器平行于基准。
被测零件回转一周过程中,指示器读数的最大差值为所测平面的端面跳动误差。
按上述方法重复测量若干个截面,取各截面读数最大差值为该零件的端面圆跳动误差。
测量方法1)平行度误差测量:平行度误差常用的方法有打表法和水平仪法。
2). 垂直度误差测量: 常用的方法有光隙法(透光法)、打表法、水平仪法、闭合测量法等。
本次以光隙法测量。
3). 跳动误差测量:跳动误差是被测表面基准轴线回转时,测头与被测面作法向接触的指示表上最大值与最小值的差值。
4). 平面度误差测量:主要有间隙法、打表法、光轴法和干涉法。
本次实训主要以打表法测量。
测量步骤平行度误差测量:A)测量前,擦净检验平板2和被测零件1,然后按下图5将被测零件基准放在平板2上,并使被测零件的基准面与平板工作面贴合,(最薄的厚薄规不能塞入两面之间为准)。
形位公差带释义及形位误差的评定及检测授课课题:形位公差带释义及形位误差的评定及检测目标及要求:掌握形位公差标注及释义;了解形位误差评定及检测常识;授课方式:采用动画演示与启发相结合第三章形状和位置公差课堂教学引入:通过前两节的学习,我们了解了形位公差项目、符号及标注方法,同学们发现,同一种标注方法往往有几种不同的公差带形状,究竟有什么不同呢?标注上如何解释呢?§3-2形位公差及其标注方法三、形位公差及其标注释义(一)线轮廓度和面轮廓度形状或位置公差的特点是它可能有基准,也可能没有基准,当它有基准时,它呈现形状公差的特性,其公差带无方向位置限制;当它有基准时,它呈现位置误差特性,其公差带位置受基准和理论正确尺寸限制。
1、线轮廓度:限制实际曲线对其理想曲线变动量的一项指标。
公差带:包络一系列直径为公差值t的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线上。
注意:理论正确尺寸-确定被测要素的理想形状、方向、位置的理想尺寸。
理想要素需由基准和理论正确尺寸确定。
2、面轮廓度:限制实际曲面对其理想曲面变动量的一项指标。
公差带:包络一系列直径为公差值t的球的两包络面之间的区域,诸球球心位于理想轮廓面上。
(二)位置公差1、定向公差:关联实际要素对基准在方向上允许的变动全量。
特点:A:定向公差带相对于基准有确定的方向。
B:定向公差带具有综合控制被测要素的方向和形状的能力。
抓住特点,分析典型(1)平行度:限制实际要素对基准在平行方向上变动量的一项指标。
(2)垂直度:限制实际要素对基准在垂直方向上变动量的一项指标。
(3)倾斜度:限制实际要素对基准在倾斜方向上变动量的一项指标。
2、定位公差:是关联实际要素对基准在位置上允许的变动全量。
特点:A:定位公差带具有确定的位置B:定位公差带具有综合控制被测要素位置、方向和形状的能力。
关联要素相对基准的理想位置由理论正确尺寸确定。
(1)同轴度:限制被测轴线偏离基准轴线的一项指标。