matlab仿真第四章解读
- 格式:ppt
- 大小:968.50 KB
- 文档页数:56
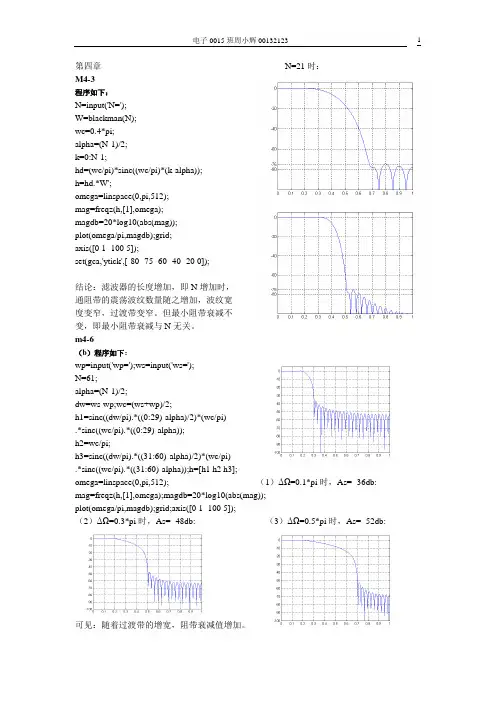
第四章N=21时:M4-3程序如下:N=input('N=');W=blackman(N);wc=0.4*pi;alpha=(N-1)/2;k=0:N-1;hd=(wc/pi)*sinc((wc/pi)*(k-alpha));h=hd.*W';omega=linspace(0,pi,512);mag=freqz(h,[1],omega);magdb=20*log10(abs(mag));plot(omega/pi,magdb);grid; N=51时:axis([0 1 -100 5]);set(gca,'ytick',[-80 -75 -60 -40 -20 0]);结论:滤波器的长度增加,即N增加时,通阻带的震荡波纹数量随之增加,波纹宽度变窄,过渡带变窄。
但最小阻带衰减不变,即最小阻带衰减与N无关。
m4-6(b)程序如下:wp=input('wp=');ws=input('ws=');N=61;alpha=(N-1)/2;dw=ws-wp;wc=(ws+wp)/2;h1=sinc((dw/pi).*((0:29)-alpha)/2)*(wc/pi).*sinc((wc/pi).*((0:29)-alpha));h2=wc/pi;h3=sinc((dw/pi).*((31:60)-alpha)/2)*(wc/pi).*sinc((wc/pi).*((31:60)-alpha));h=[h1 h2 h3];omega=linspace(0,pi,512); (1)ΔΩ=0.1*pi时,As= -36db: mag=freqz(h,[1],omega);magdb=20*log10(abs(mag));plot(omega/pi,magdb);grid;axis([0 1 -100 5]);(2)ΔΩ=0.3*pi时,As= -48db: (3)ΔΩ=0.5*pi时,As= -52db:可见:随着过渡带的增宽,阻带衰减值增加。
电机与拖动基础及MATLAB仿真习题答案(第四章)4-14 ⼀台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=87.5%,求电动机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-15 ⼀台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-16 已知⼀台直流电机极对数p=2,槽数Z 和换向⽚数K 均等于22,采⽤单叠绕组。
试求:(1)绕组各节距;(2)并联⽀路数。
解:(1)第⼀节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第⼆节距415y 12=-=-=y y(2)并联⽀路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,⽓隙每极磁通Φ=2.1×10-2Wb ,试求:(1)采⽤单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持⽀路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联⽀路对数a=p=3,电磁转矩 m N I a pN T a ?==Φ=38.1310021.0314.3240032π如果把电枢绕组改为单波绕组, 保持⽀路电流a i 的数值不变,则电磁转矩也不变,仍为 13.369m N ?,因为⽆论是叠绕组还是波绕组,所有导体产⽣的电磁转矩的⽅向是⼀致的, 保持⽀路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
也可以⽤计算的⽅法: 单叠绕组时并联⽀路数为6,⽀路电流 A I i a a 6106==改为单波绕组, 保持⽀路电流a i 的数值不变,仍为A 610,⽽并联⽀路数为2 (a=1), 电枢电流A i I a a 3102== 电磁转矩 m N T ?==38.13310021.0114.324003。


第3章程序及注释例3.3 考虑仿真对象)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+-- (3.41) 其中,)(k v 是服从正态分布的白噪声N )1,0(。
输入信号采用4阶M 序列,幅度为1。
选择如下形式的辨识模型)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+ (3.42)设输入信号的取值是从k =1到k =16的M 序列,则待辨识参数LSθˆ为LS θˆ=L τL 1L τL z H )H H -(。
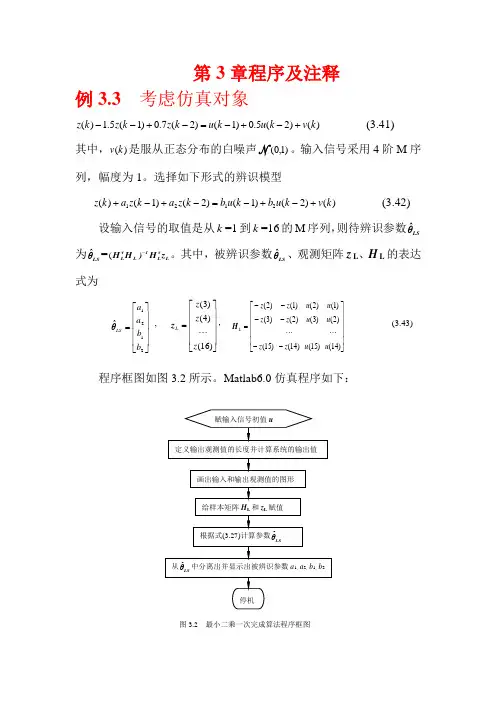
其中,被辨识参数LSθˆ、观测矩阵z L 、H L 的表达式为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121ˆb b a a LSθ , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)16()4()3(z z z L z , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=)14()2()1()15()3()2()14()2()1()15()3()2(u u u u u u z z z z z z L H (3.43) 程序框图如图3.2所示。
Matlab6.0仿真程序如下:%二阶系统的最小二乘一次完成算法辨识程序,在光盘中的文件名:FLch3LSeg1.mu=[-1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]; %系统辨识的输入信号为一个周期的M序列z=zeros(1,16); %定义输出观测值的长度for k=3:16z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %用理想输出值作为观测值endsubplot(3,1,1) %画三行一列图形窗口中的第一个图形stem(u) %画输入信号u的径线图形subplot(3,1,2) %画三行一列图形窗口中的第二个图形i=1:1:16; %横坐标范围是1到16,步长为1plot(i,z) %图形的横坐标是采样时刻i, 纵坐标是输出观测值z, 图形格式为连续曲线subplot(3,1,3) %画三行一列图形窗口中的第三个图形stem(z),grid on %画出输出观测值z的径线图形,并显示坐标网格u,z %显示输入信号和输出观测信号%L=14 %数据长度HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9) u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11)u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13) u(12);-z(14) -z(13)u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵H L赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15); z(16)] % 给样本矩阵z L赋值%Calculating Parametersc1=HL'*HL; c2=inv(c1); c3=HL'*ZL; c=c2*c3 %计算并显示θˆLS%Display Parametersa1=c(1), a2=c(2), b1=c(3),b2=c(4) %从θˆ中分离出并显示a1、a2、b1、LSb2%End程序运行结果:>>u =[ -1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]z =[ 0,0,0.5000,0.2500,0.5250,2.1125,4.3012,6.4731,6.1988,3.2670,-0.9386,-3.1949,-4.6352,6.2165,-5.5800,-2.5185]HL =0 0 1.0000 -1.0000-0.5000 0 -1.0000 1.0000-0.2500 -0.5000 1.0000 -1.0000-0.5250 -0.2500 1.0000 1.0000-2.1125 -0.5250 1.0000 1.0000-4.3012 -2.1125 1.0000 1.0000-6.4731 -4.3012 -1.0000 1.0000-6.1988 -6.4731 -1.0000 -1.0000-3.2670 -6.1988 -1.0000 -1.00000.9386 -3.2670 1.0000 -1.00003.1949 0.9386 -1.0000 1.00004.6352 3.1949 -1.0000 -1.00006.2165 4.6352 1.0000 -1.00005.58006.2165 1.0000 1.0000ZL =[ 0.5000,0.2500,0.5250,2.1125,4.3012,6.4731,6.1988,3.2670,-0.9386,-3.1949,-4.6352,-6.2165,-5.5800,-2.5185]Tc =[ -1.5000,0.7000,1.0000,0.5000]Ta1 = -1.5000a2 = 0.7000b1 = 1.0000b2 =0.5000>>-11-1010-10010从仿真结果表3.1可以看出,由于所用的输出观测值没有任何噪声成分,所以辨识结果也无任何误差。