FANUC报警列表
- 格式:docx
- 大小:23.48 KB
- 文档页数:7
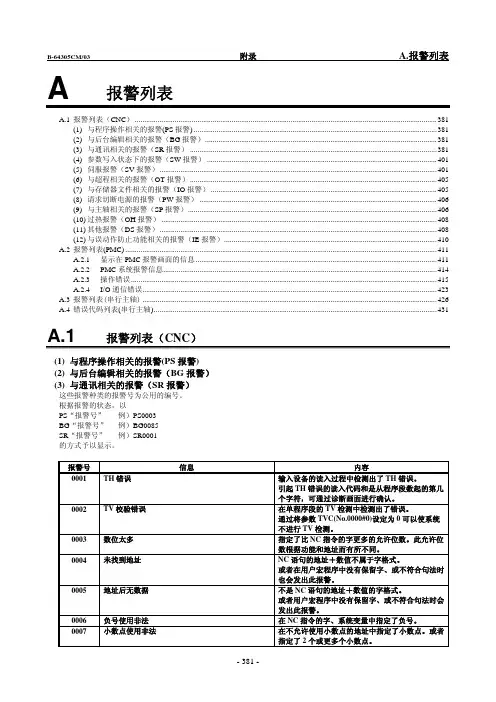
A 报警列表A.1 报警列表(CNC) (381)(1) 与程序操作相关的报警(PS报警) (381)(2) 与后台编辑相关的报警(BG报警) (381)(3) 与通讯相关的报警(SR报警) (381)(4) 参数写入状态下的报警(SW报警) (401)(5) 伺服报警(SV报警) (401)(6) 与超程相关的报警(OT报警) (405)(7) 与存储器文件相关的报警(IO报警) (405)(8) 请求切断电源的报警(PW报警) (406)(9) 与主轴相关的报警(SP报警) (406)(10) 过热报警(OH报警) (408)(11) 其他报警(DS报警) (408)(12) 与误动作防止功能相关的报警(IE报警) (410)A.2 报警列表(PMC) (411)A.2.1 显示在PMC报警画面的信息 (411)A.2.2 PMC系统报警信息 (414)A.2.3 操作错误 (415)A.2.4 I/O通信错误 (423)A.3 报警列表(串行主轴) (426)A.4 错误代码列表(串行主轴) (431)A.1 报警列表(CNC)(1) 与程序操作相关的报警(PS报警)(2) 与后台编辑相关的报警(BG报警)(3) 与通讯相关的报警(SR报警)这些报警种类的报警号为公用的编号。
根据报警的状态,以PS“报警号”例)PS0003BG“报警号”例)BG0085SR“报警号”例)SR0001的方式予以显示。
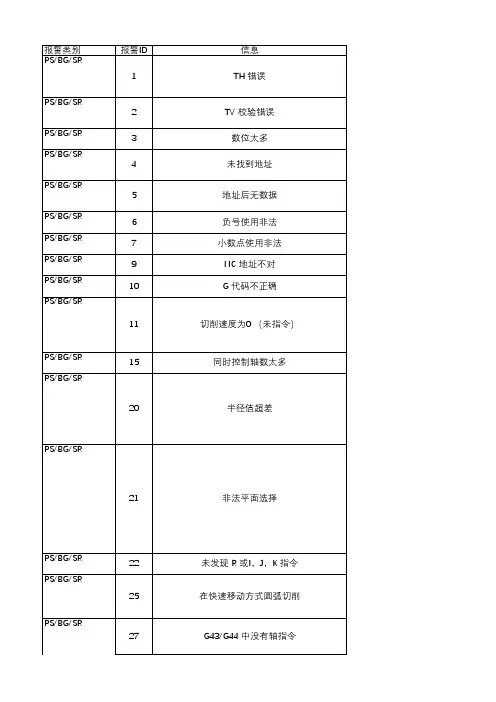
报警号信息内容0001 TH错误输入设备的读入过程中检测出了TH错误。
引起TH错误的读入代码和是从程序段数起的第几个字符,可通过诊断画面进行确认。
0002 TV校验错误在单程序段的TV检测中检测出了错误。
通过将参数TVC(No.0000#0)设定为0可以使系统不进行TV检测。
0003 数位太多指定了比NC指令的字更多的允许位数。
此允许位数根据功能和地址而有所不同。
0004 未找到地址 NC语句的地址+数值不属于字格式。
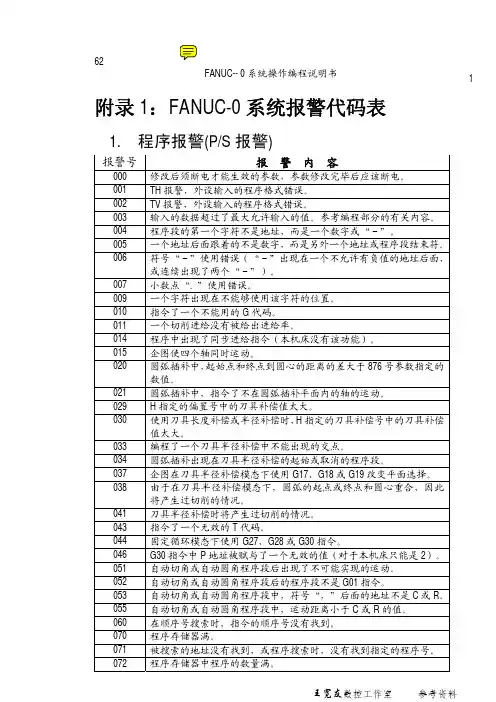
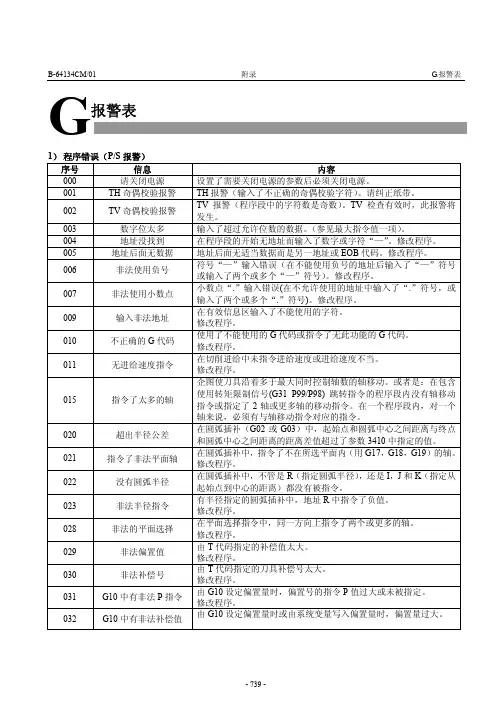
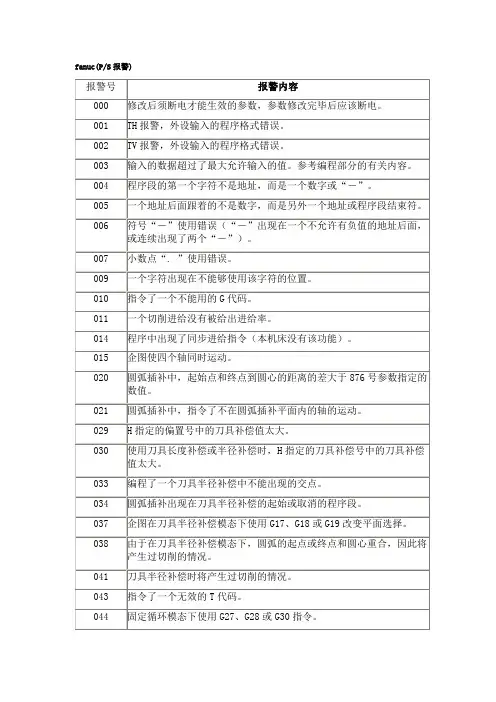
1 附录1:FANUC-0系统报警代码表1. 程序报警(P/S报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH报警,外设输入的程序格式错误。
002 TV报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T代码。
044 固定循环模态下使用G27、G28或G30指令。
046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。
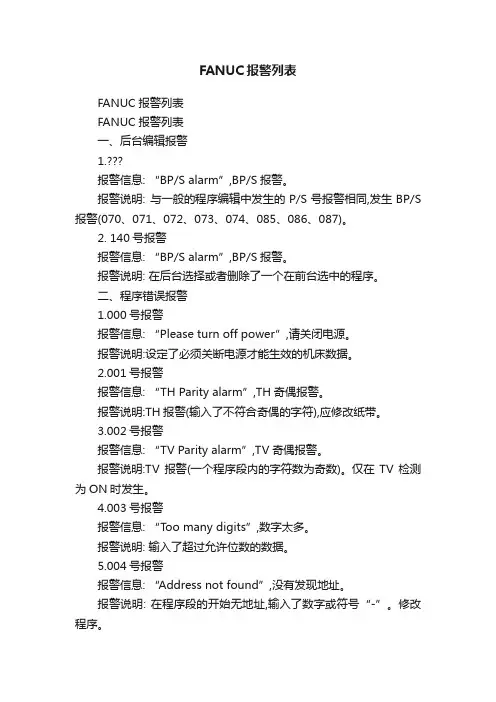
FANUC报警列表FANUC报警列表FANUC报警列表一、后台编辑报警1.报警信息: “BP/S alarm”,BP/S报警。
报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S 报警(070、071、072、073、074、085、086、087)。
2. 140号报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息: “Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息: “TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息: “TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息: “T oo many digits”,数字太多。
报警说明: 输入了超过允许位数的数据。
5.004号报警报警信息: “Address not found”,没有发现地址。
报警说明: 在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息: “No data after address”,地址之后没有数据。
报警说明: 地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息: “Illegal use of negative sign”,非法使用负号。
报警说明: 负号“-”输入错误(“-”出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序。
8.007号报警报警信息: “Illegal use of decimal point”,非法使用十进制小数点。
报警说明: 小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。

A 报警列表A.1 报警列表(CNC) (381)(1) 与程序操作相关的报警(PS报警) (381)(2) 与后台编辑相关的报警(BG报警) (381)(3) 与通讯相关的报警(SR报警) (381)(4) 参数写入状态下的报警(SW报警) (401)(5) 伺服报警(SV报警) (401)(6) 与超程相关的报警(OT报警) (405)(7) 与存储器文件相关的报警(IO报警) (405)(8) 请求切断电源的报警(PW报警) (406)(9) 与主轴相关的报警(SP报警) (406)(10) 过热报警(OH报警) (408)(11) 其他报警(DS报警) (408)(12) 与误动作防止功能相关的报警(IE报警) (410)A.2 报警列表(PMC) (411)A.2.1 显示在PMC报警画面的信息 (411)A.2.2 PMC系统报警信息 (414)A.2.3 操作错误 (415)A.2.4 I/O通信错误 (423)A.3 报警列表(串行主轴) (426)A.4 错误代码列表(串行主轴) (431)A.1 报警列表(CNC)(1) 与程序操作相关的报警(PS报警)(2) 与后台编辑相关的报警(BG报警)(3) 与通讯相关的报警(SR报警)这些报警种类的报警号为公用的编号。
根据报警的状态,以PS“报警号”例)PS0003BG“报警号”例)BG0085SR“报警号”例)SR0001的方式予以显示。
报警号信息内容0001 TH错误输入设备的读入过程中检测出了TH错误。
引起TH错误的读入代码和是从程序段数起的第几个字符,可通过诊断画面进行确认。
0002 TV校验错误在单程序段的TV检测中检测出了错误。
通过将参数TVC(No.0000#0)设定为0可以使系统不进行TV检测。
0003 数位太多指定了比NC指令的字更多的允许位数。
此允许位数根据功能和地址而有所不同。
0004 未找到地址 NC语句的地址+数值不属于字格式。

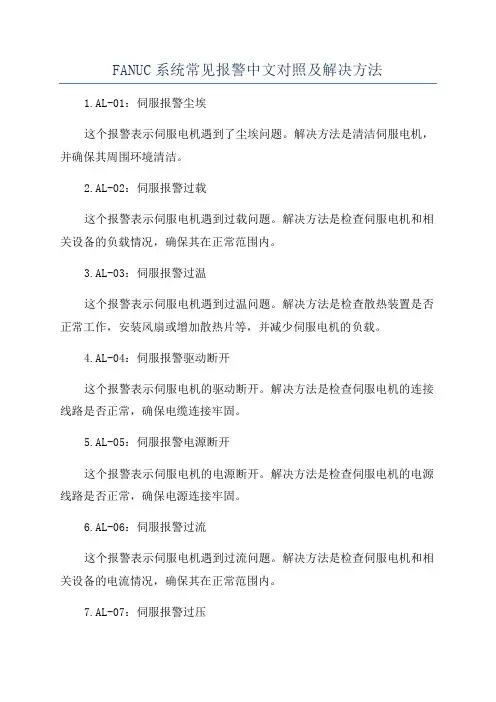
FANUC系统常见报警中文对照及解决方法1.AL-01:伺服报警尘埃这个报警表示伺服电机遇到了尘埃问题。
解决方法是清洁伺服电机,并确保其周围环境清洁。
2.AL-02:伺服报警过载这个报警表示伺服电机遇到过载问题。
解决方法是检查伺服电机和相关设备的负载情况,确保其在正常范围内。
3.AL-03:伺服报警过温这个报警表示伺服电机遇到过温问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
4.AL-04:伺服报警驱动断开这个报警表示伺服电机的驱动断开。
解决方法是检查伺服电机的连接线路是否正常,确保电缆连接牢固。
5.AL-05:伺服报警电源断开这个报警表示伺服电机的电源断开。
解决方法是检查伺服电机的电源线路是否正常,确保电源连接牢固。
6.AL-06:伺服报警过流这个报警表示伺服电机遇到过流问题。
解决方法是检查伺服电机和相关设备的电流情况,确保其在正常范围内。
7.AL-07:伺服报警过压这个报警表示伺服电机遇到过压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
8.AL-08:伺服报警欠压这个报警表示伺服电机遇到欠压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
9.AL-09:伺服报警过热这个报警表示伺服电机遇到过热问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
10.AL-10:伺服报警驱动电流异常这个报警表示伺服电机驱动电流异常。
解决方法是检查伺服电机的驱动器和电缆连接是否正常,并确保电缆连接牢固。
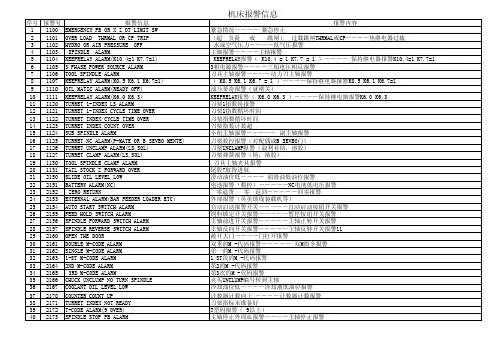
机床报警信息序号报警号报警信息报警内容11100EMERGENCY PB OR X Z OT LIMIT SW紧急情况---- 紧急停止21101OVER LOAD THRMAL OR CP TRIP (超 负荷 或 跳闸) 过载跳闸THRMAL或CP----热继电器过载31102HYDRO OR AIR PRESSURE OFF 水或空气压力----低气压报警41103 SPINDLE ALARM 主轴报警----主轴报警51104KEEPRELAY ALARM(K10.4=1 K7.7=1) KEEPRELAY报警( K10.4 = 1 K7.7 = 1 )---- 保持继电器报警K10.4=1 K7.7=1 61105 3 PHASE POWER SOURCE ALARM 3相电源报警----三相电压相反报警71106TOOL SPINDLE ALARM 刀具主轴报警----动力刀主轴报警81107KEEPRELAY ALARM(K0.5 K6.1 K6.7=1) ( K0.5 K6.1 K6.7 = 1 )----保持继电器报警K0.5 K6.1 K6.7=191110OIL MATIC ALARM(READY OFF) 油马蒂奇报警(就绪关)101111KEEPRELAY ALARM(K6.0 K6.3)KEEPRELAY报警( K6.0 K6.3 )----保持继电器报警K6.0 K6.3111120TURRET 1-INDEX LS ALARM 刀架1指数镑报警121121TURRET 1-INDEX CYCLE TIME OVER刀架1指数循环时间131122TURRET INDEX CYCLE TIME OVER 刀架指数循环时间141123TURRET INDEX COUNT OVER刀架指数计数超151124SUB SPINDLE ALARM 小组主轴报警----- 副主轴报警161125TURRET NC ALARM(P-MATE OR B SEVBO MENTE)刀架数控报警(对配偶或B SEVBO门)171126TURRET UNCLAMP ALARM(LS,SOL)刀架UNCLAMP报警(叙利亚镑,溶胶)181127TURRET CLAMP ALARM(LS,SOL) 刀架弹簧报警(镑,溶胶)191130TOOL SPINDLE CLAMP ALARM 刀具主轴夹具报警201131TAIL STOCK Z FORWARD OVER 尾股?取得进展212150SLIDE OIL LEVEL LOW 滑动油位低---- 润滑油低油位报警222151BATTERY ALARM(NC) 电池报警(数控)-----NC电池低电压报警232152 ZERO RETURN 零退货 零 返回-----回零报警242153EXTERNAL ALARM(BAR FEEDER LOADER ETC)外部报警(英美馈线装载机等)252154AUTO START SWITCH ALARM自动启动报警开关-----自动启动按钮开关报警262155FEED HOLD SWITCH ALARM饲料锁定开关报警-----暂停按钮开关报警272156SPINDLE FORWARD SWITCH ALARM主轴前进开关报警-----主轴正转开关报警282157SPINDLE REVERSE SWITCH ALARM主轴反向开关报警-----主轴反转开关报警11292160OPEN THE DOOR 敞开大门----门打开报警302161DOUBLE M-CODE ALARM双重的M -代码报警----- 双M指令报警312162SINGLE M-CODE ALARM单一的M -代码报警3221631-ST M-CODE ALARM 1 ST段的M -代码报警3321642ND M-CODE ALARM 第2的M -代码报警342165 3RD M-CODE ALARM 第3次的M -代码报警352166CHUCK UNCLUMP NO TURN SPINDLE 夹头UNCLUMP编号转到主轴362167COOLANT OIL LEVEL LOW冷却油位低----冷却液低油位报警372170COUNTER COUNT UP 计数器计数向上 ----计数器计数报警382171TURRET INDEX NOT READY 刀架指标未准备好392172T-CODE ALARM(9 OVER)T型码报警( 9以上)402173SPINDLE STOP PB ALARM 主轴停止外周血报警----主轴停止报警。
fanuc(P/S报警)2. 伺服报警3. 超程报警FANUC 0i数控系统报警分类#11.报警信息: “BP/S alarm”,BP/S报警。
报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S报警(070、071、072、073、074、085、086、087)。
2. 140号报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息: “Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息: “TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息: “TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息: “Too many digits”,数字太多。
报警说明: 输入了超过允许位数的数据。
5.004号报警报警信息: “Address not found”,没有发现地址。
报警说明: 在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息: “No data after address”,地址之后没有数据。
报警说明: 地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息: “Illegal use of negative sign”,非法使用负号。
报警说明: 负号“-”输入错误(“-” 出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序8.007号报警报警信息: “Illegal use of decimal point”,非法使用十进制小数点。
报警说明: 小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。
A 报警列表A.1 报警列表(CNC) (381)(1) 与程序操作相关的报警(PS报警) (381)(2) 与后台编辑相关的报警(BG报警) (381)(3) 与通讯相关的报警(SR报警) (381)(4) 参数写入状态下的报警(SW报警) (401)(5) 伺服报警(SV报警) (401)(6) 与超程相关的报警(OT报警) (405)(7) 与存储器文件相关的报警(IO报警) (405)(8) 请求切断电源的报警(PW报警) (406)(9) 与主轴相关的报警(SP报警) (406)(10) 过热报警(OH报警) (408)(11) 其他报警(DS报警) (408)(12) 与误动作防止功能相关的报警(IE报警) (410)A.2 报警列表(PMC) (411)A.2.1 显示在PMC报警画面的信息 (411)A.2.2 PMC系统报警信息 (414)A.2.3 操作错误 (415)A.2.4 I/O通信错误 (423)A.3 报警列表(串行主轴) (426)A.4 错误代码列表(串行主轴) (431)A.1 报警列表(CNC)(1) 与程序操作相关的报警(PS报警)(2) 与后台编辑相关的报警(BG报警)(3) 与通讯相关的报警(SR报警)这些报警种类的报警号为公用的编号。
根据报警的状态,以PS“报警号”例)PS0003BG“报警号”例)BG0085SR“报警号”例)SR0001的方式予以显示。
报警号信息内容0001 TH错误输入设备的读入过程中检测出了TH错误。
引起TH错误的读入代码和是从程序段数起的第几个字符,可通过诊断画面进行确认。
0002 TV校验错误在单程序段的TV检测中检测出了错误。
通过将参数TVC(No.0000#0)设定为0可以使系统不进行TV检测。
0003 数位太多指定了比NC指令的字更多的允许位数。
此允许位数根据功能和地址而有所不同。
0004 未找到地址 NC语句的地址+数值不属于字格式。
Fanuc 16/18/21 S ervo A larm L istNumber Message Contents400 SERVO A LARM: n–TH A XISOVERLOADThe n–th a xis (axis 1–8) o verload s ignal i s o n. R efer t o d iagnosisdisplay N o. 201 f or d etails.401 SERVO A LARM: n–TH A XISVRDY O FFThe n–th a xis (axis 1–8) s ervo a mplifier R EADY s ignal (DRDY)went o ff. R efer t o t he p rocedure o f t roubleshooting.404 SERVO A LARM: n–TH A XISVRDY O NEven t hough t he n–th a xis (axis 1–8) R EADY s ignal (MCON)went o ff, t he s ervo a mplifier R EADY s ignal (DRDY) i s s till o n. O r,when t he p ower w as t urned o n, D RDY w ent o n e ven t houghMCON w as o ff. C heck t hat t he s ervo i nterface m odule a nd s ervoamp a re c onnected.405 SERVO A LARM: (ZERO P OINTRETURN F AULT)Position c ontrol s ystem f ault. D ue t o a n N C o r s ervo s ystem f aultin t he r eference p osition r eturn, t here i s t he p ossibility t hatreference p osition r eturn c ould n ot b e e xecuted c orrectly. T ryagain f rom t he m anual r eference p osition r eturn.407 SERVO A LARM: E XCESSERRORThe d ifference i n s ynchronous a xis p osition d eviation e xceededthe s et v alue.409 SERVO A LARM: n A XISTORQUE A LMAbnormal s ervo m otor l oad h as b een d etected. A lternatively,abnormal s pindle m otor l oad h as b een d etected i n C s m ode.410 SERVO A LARM: n–TH A XIS –EXCESS E RRORThe p osition d eviation v alue w hen t he n–th a xis (axis 1–8) s topsis l arger t han t he s et v alue.Refer t o t he p rocedure o f t roubleshooting.411 SERVO A LARM: n–TH A XIS –EXCESS E RRORThe p osition d eviation v alue w hen t he n–th a xis (axis 1–8)moves i s l arger t han t he s et v alue.Refer t o t he p rocedure o f t roubleshooting.413 SERVO A LARM: n–th A XIS –LSI O VERFLOWThe c ontents o f t he e rror r egister f or t he n–th a xis (axis 1–8)exceeded 231 p ower. T his e rror u sually o ccurs a s t he r esult o f a nimproperly s et p arameter.414 SERVO A LARM: n–TH A XIS– D ETECTION R ELATEDERRORN–th a xis (axis 1–8) d igital s ervo s ystem f ault. R efer t o d iagnosisdisplay N o. 200 a nd N o.204 f or d etails.415 SERVO A LARM: n–TH A XIS –EXCESS S HIFTA s peed h igher t han 511875 u nits/s w as a ttempted t o b e s et i nthe n–th a xis (axis 1–8). T his e rror o ccurs a s t he r esult o fimproperly s et C MR.416 SERVO A LARM: n–TH A XIS –DIS C ONNECTIONPosition d etection s ystem f ault i n t he n–th a xis (axis 1–8) p ulsecoder (disconnection a larm). R efer t o d iagnosis d isplay N o. 201for d etails.ALARM L ISTDetails o f s ervo a larm N o.414The d etails o f s ervo a larm N o. 414 a re d isplayed i n t he d iagnosis d isplay (No. 200 a nd N o.204) a s s hown below.DGN 200#7 (OVL) : A n o verload a larm i s b eing g enerated. #6 (LV) : A l ow v oltage a larm i s b eing g enerated i n s ervo a mp.#5 (OVC) : A o vercurrent a larm i s b eing g enerated i nside o f d igital s ervo. #4 (HCA) : A n a bnormal c urrent a larm i s b eing g enerated i n s ervo a mp. #3 (HV A) : A n o vervoltage a larm i s b eing g enerated i n s ervo a mp.#2 (DCA) : A r egenerative d ischarge c ircuit a larm i s b eing g enerated i n s ervo a mp. #1 (FBA) : A d isconnection a larm i s b eing g enerated. #0 (OFA) : A n o verflow a larm i s b eing g enerated i nside o f d igital s ervo.417SERVO A LARM: n –TH A XIS –PARAMETER I NCORRECT This a larm o ccurs w hen t he n –th a xis (axis 1–8) i s i n o ne o f t heconditions l isted b elow. (Digital s ervo s ystem a larm) 1) T he v alue s et i n P arameter N o. 2020 (motor f orm) i s o ut o f t hespecified l imit. 2) A p roper v alue (111 o r –111) i s n ot s et i n p arameter N o.2022 (motor r evolution d irection). 3) I llegal d ata (a v alue b elow 0, e tc.) w as s et i n p arameter N o. 2023 (number o f s peed f eedback p ulses p er m otor r evolution). 4) I llegal d ata (a v alue b elow 0, e tc.) w as s et i n p arameter N o. 2024 (number o f p osition f eedback p ulses p er m otor r evolution). 5) P arameters N o. 2084 a nd N o. 2085 (flexible f ield g ear r ate) have n ot b een s et. 6) A v alue o utside t he l imit o f {1 t o t he n umber o f c ontrol a xes} o r a n on– c ontinuous v alue (Parameter 1023 (servo a xis number) c ontains a v alue o ut o f t he r ange f rom 1 t o t he number o f a xes, o r a n i solated v alue (for e xample, 4 n ot preceded b y 3).was s et i n p arameter N o. 1023 (servo a xis number).Number C ontents M essage420SERVO A LARM: n A XISSYNC T ORQUE (M s eries) During s imple s ynchronous c ontrol, t he d ifference b etween t hetorque c ommands f or t he m aster a nd s lave a xes e xceeded t he value s et i n p arameter N o. 2031. 421SERVO A LARM: n A XIS EXCESS E R (D)The d ifference b etween t he e rrors i n t he s emi–closed l oop a nd closed l oop h as b ecome e xcessive d uring d ual p osition feedback. C heck t he v alues o f t he d ual p osition c onversion coefficients i n p arameters N o. 2078 a nd 2079.#7 #6 #5 #4 #3 #2 #1 #0 OVL LVOVCHCAHV ADCAFBAOFADGN 204#6 (OFS) : A c urrent c onversion e rror h as o ccurred i n t he d igital s ervo. #5 (MCC) : A m agnetic c ontactor c ontact i n t he s ervo a mplifier h as w elded. #4 (LDA) : T he L ED i ndicates t hat s erial p ulse c oder C i s d efective#3 (PMS) : A f eedback p ulse e rror h as o ccured b ecause t he f eedback c able i s d efective.Details o f s ervo a larms N o. 400 a nd N o. 416The d etails o f s ervo a larms N o. 400 a nd N o. 416 a re d isplayed i n t he d iagnosis d isplay (No. 201) a s shown b elow.DGN 201:When O VL e qual 1 i n d iagnostic d ata N o.200 (servo a larm N o. 400 i s b eing g enerated):#7 (ALD)0 : M otor o verheating1 : A mplifier o verheatingWhen F BAL e qual 1 i n d iagnostic d ata N o.200 (servo a larm N o. 416 i s being g enerated):#7 #6 #5 #4 #3 #2 #1 #0OFSMCCLDAPMS#7 #6 #5 #4 #3#2#1#0ALDEXPALD EXP Alarm d etails1 0 Built–in p ulse c oder d isconnect (hardware) 1 1 Separately i nstalled p ulse c oderdisconnection (hardware)Pulse c oder i s n ot c onnected d ue t o s oftware.。
之袁州冬雪创作FANUC-0系统报警代码表 1. 程序报警(P/S报警)报警号报警内容000 修改后须断电才干生效的参数,参数修改完毕后应该断电.001 TH报警,外设输入的程序格式错误.002 TV报警,外设输入的程序格式错误.003 输入的数据超出了最大允许输入的值.参考编程部分的有关内容.004 程序段的第一个字符不是地址,而是一个数字或“-”.005 一个地址后面跟着的不是数字,而是别的一个地址或程序段竣事符.006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或持续出现了两个“-”).007 小数点“. ”使用错误.009 一个字符出现在不克不及够使用该字符的位置.010 指令了一个不克不及用的G代码.011 一个切削进给没有被给出进给率.014 程序中出现了同步进给指令(本机床没有该功能).015 企图使四个轴同时运动.020 圆弧插补中,起始点和终点到圆心的间隔的差大于876号参数指定的数值.021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动.029 H指定的偏置号中的刀具抵偿值太大.030 使用刀具长度抵偿或半径抵偿时,H指定的刀具抵偿号中的刀具抵偿值太大.033 编程了一个刀具半径抵偿中不克不及出现的交点.034 圆弧插补出现在刀具半径抵偿的起始或取消的程序段.037 企图在刀具半径抵偿模态下使用G17、G18或G19改变平面选择.038 由于在刀具半径抵偿模态下,圆弧的起点或终点和圆心重合,因此将发生过切削的情况.041 刀具半径抵偿时将发生过切削的情况.043 指令了一个无效的T代码.044 固定循环模态下使用G27、G28或G30指令.046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2).051 自动切角或自动圆角程序段后出现了不成能实现的运动.052 自动切角或自动圆角程序段后的程序段不是G01指令.053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R.055 自动切角或自动圆角程序段中,运动间隔小于C或R的值.060 在顺序号搜索时,指令的顺序号没有找到.070 程序存储器满.071 被搜索的地址没有找到,或程序搜索时,没有找到指定的程序号.072 程序存储器中程序的数量满.073 输入新程序时企图使用已经存在的程序号.074 程序号不是1~9999之间的整数.076 子程序调用指令M98中没有地址P.077 子程序嵌套超出三重.078 M98或M99中指令的程序号或顺序号不存在.085 由外设输入程序时,输入的格式或波特率不正确.086 使用读带机/穿孔机接口停止程序输入时,外设的准备信号被关断.087 使用读带机/穿孔机接口停止程序输入时,虽然指定了读入停止,但读过了10个字符后,输入不克不及停止.090 由于间隔参考点太近或速度太低而不克不及正常执行恢复参考点的操纵.091 自动运转暂停时(有剩余移动量或执行辅助功能时)停止了手动返回参考点.092 G27指令中,指令位置到达后发现不是参考点.100 PWE=1,提示参数修改完毕后将PWE置零,并按RESET键.101 在编辑或输入程序过程中,NC刷新存储器内容时电源被关断.当该报警出现时,应将PWE置1,关断电源,再次打开电源时按住DELETE 键以清除存储器中的内容.131 PMC报警信息超出5条.179 597号参数设置的可控轴数超出了最大值.224 第一次返回参考点前企图执行可编程的轴运动指令. 2. 伺服报警报警号报警内容400 伺服放大器或电机过载.401 速度节制器准备号信号(VRDY)被关断.404 VRDY信号没有被关断,但位置节制器准备好信号(PRDY)被关断.正常情况下,VRDY和PRDY信号应同时存在.405 位置节制系统错误,由于NC或伺服系统的问题使返回参考点的操作失败.重新停止返回参考点的操纵.410 X轴停止时,位置误差超出设定值.411 X轴运动时,位置误差超出设定值.413 X轴误差寄存器中的数据超出极限值,或D/A转换器承受的速度指令超出极限值(能够是参数设置的错误).414 X轴数字伺服系统错误,检查720号诊断参数并参考伺服系统手册.415 X轴指令速度超出511875检测单位/秒,检查参数CMR.416 X轴编码器故障.417 X轴电机参数错误,检查8120、8122、8123、8124号参数.420 Y 轴停止时,位置误差超出设定值.421 Y轴运动时,位置误差超出设定值.423 Y轴误差寄存器中的数据超出极限值,或D/A转换器承受的速度指令超出极限值(能够是参数设置的错误).424 Y轴数字伺服系统错误,检查721号诊断参数并参考伺服系统手册.425 Y轴指令速度超出511875检测单位/秒,检查参数CMR.426 Y轴编码器故障.427 Y轴电机参数错误,检查8220、8222、8223、8224号参数.430 Z轴停止时,位置误差超出设定值.431 Z轴运动时,位置误差超出设定值.433 Z轴误差寄存器中的数据超出极限值,或D/A转换器承受的速度指令超出极限值(能够是参数设置的错误).434 Z轴数字伺服系统错误,检查722号诊断参数并参考伺服系统手册.435 Z轴指令速度超出511875检测单位/秒,检查参数CMR.436 Z轴编码器故障.437 Z轴电机参数错误,检查8320、8322、8323、8324号参数. 3. 超程报警报警号报警内容510 X轴正向软极限超程.511 X轴负向软极限超程.520 Y轴正向软极限超程.521 Y轴负向软极限超程.530 Z轴正向软极限超程.531 Z轴负向软极限超程. 4. 过热报警及系统报警700号报警为NC主印刷线路板过热报警,704号报警为主轴过热报警.其它的6××为PMC系统报警,9××为NC系统报警.用户如发现以上两种报警,请及时通知我们或直接向FANUC公司咨询,以便接洽维修.2×××为机床报警。
A 报警列表A.1 报警列表(CNC) (381)(1) 与程序操作相关的报警(PS报警) (381)(2) 与后台编辑相关的报警(BG报警) (381)(3) 与通讯相关的报警(SR报警) (381)(4) 参数写入状态下的报警(SW报警) (401)(5) 伺服报警(SV报警) (401)(6) 与超程相关的报警(OT报警) (405)(7) 与存储器文件相关的报警(IO报警) (405)(8) 请求切断电源的报警(PW报警) (406)(9) 与主轴相关的报警(SP报警) (406)(10) 过热报警(OH报警) (408)(11) 其他报警(DS报警) (408)(12) 与误动作防止功能相关的报警(IE报警) (410)A.2 报警列表(PMC) (411)A.2.1 显示在PMC报警画面的信息 (411)A.2.2 PMC系统报警信息 (414)A.2.3 操作错误 (415)A.2.4 I/O通信错误 (423)A.3 报警列表(串行主轴) (426)A.4 错误代码列表(串行主轴) (431)A.1 报警列表(CNC)(1) 与程序操作相关的报警(PS报警)(2) 与后台编辑相关的报警(BG报警)(3) 与通讯相关的报警(SR报警)这些报警种类的报警号为公用的编号。
根据报警的状态,以PS“报警号”例)PS0003BG“报警号”例)BG0085SR“报警号”例)SR0001的方式予以显示。
报警号信息内容0001 TH错误输入设备的读入过程中检测出了TH错误。
引起TH错误的读入代码和是从程序段数起的第几个字符,可通过诊断画面进行确认。
0002 TV校验错误在单程序段的TV检测中检测出了错误。
通过将参数TVC(No.0000#0)设定为0可以使系统不进行TV检测。
0003 数位太多指定了比NC指令的字更多的允许位数。
此允许位数根据功能和地址而有所不同。
0004 未找到地址 NC语句的地址+数值不属于字格式。
FANUC报警列表(2)三、编码器报警1.3n0号报警报警信息: “nth-axis origin reurn”,第n轴原点返回。
报警说明:第n轴机械参考点无效,应重新人工设定该轴的参考点。
2.3n1号报警报警信息: “APC alarm:nth-axis communction”,APC(绝对脉冲编码器)报警:第n轴通讯错误。
报警说明:第n轴绝对编码器数据通信出错,数据传送失败。
3.3n2号报警报警信息: “APC alarm:nth-axis over time”,APC(绝对脉冲编码器)报警: 第n轴超时。
报警说明: 绝对编码器数据传送超时。
4.3n3号报警报警信息: “APC alarm:nth-axis framing”,APC(绝对脉冲编码器)报警:第n轴格式错。
报警说明:绝对编码器数据格式出错,数据传送失败。
5.3n4号报警报警信息: “APC alarm:nth-axis parity”,APC(绝对脉冲编码器)报警:第n轴奇偶错误。
报警说明:绝对编码器数据奇偶性出错,数据传送失败。
6.3n5号报警报警信息: “APC alarm:nth-axis:nth-axis pulse error”,APC(绝对脉冲编码器)报警:第n轴脉冲错误。
报警说明:绝对编码器脉冲数据丢失,绝对编码器(APC)故障。
7.3n6号报警报警信息: “APC alarm:nth-axis battery voltage 0”,APC(绝对脉冲编码器)报警: 第n轴电池电压为0。
报警说明:绝对编码器无电池,数据不能保持。
8.3n7号报警报警信息: “APC alarm:nth-axis battery low 1”,APC(绝对脉冲编码器)报警:第n轴(编码器)电池电压降低到级别1。
报警说明:绝对编码器电池电压下降,必须更换电池。
9.3n8号报警报警信息: “APC alarm:nth-axis battery low2”,APC(绝对脉冲编码器)报警:第n轴(编码器) 电池电压降低到级别2。
报警说明:绝对编码器电池电压下降,必须更换电池(包括电源关闭)。
10.3n9号报警报警信息: “SPC alarm:nth axis pulse coder”,SPC (串行脉冲编码器)报警:第n轴脉冲编码器故障。
报警说明:轴脉冲编码器错误。
四、伺服系统报警1.400号报警报警信息: “SERVO ALARM:1,2th axis overload”,伺服报警:第1、第2轴过载。
报警说明:伺服电机或伺服放大器过热。
2.401号报警报警信息: “SERVO ALARM:1,2th axis VRDY off”,伺服报警:第1、第2轴VRDY信号关断。
报警说明:伺服放大器模块准备好信号(VRDY)断开(伺服放大器故障)。
3.402号报警报警信息: “SERVO ALARM:3,4th axis overload”,伺服报警:第3、第4轴过载。
报警说明:第3、第4轴过载。
4.403号报警报警信息: “SERVO ALARM:3,4th axis VRDY off”,伺服报警: 第3、第4轴VRDY信号关断。
报警说明: 第3、第4轴伺服放大器模块准备好信号(VRDY) 断开(伺服放大器故障)5.404号报警报警信息: “SERVO ALARM:nth axis VRDY on”,伺服报警: 第n轴VRDY信号开。
报警说明: 接通电源时,轴控制板位置控制信号(PRDY)没有接通,但伺服放大器模块准备好信号(VRDY)却已经接通了。
6.405号报警报警信息: “SERVO ALARM:zero point return fault”,伺服报警: 零点返回错误。
报警说明: 位置控制系统故障(由于NC或伺服系统的问题使返回参考点操作失败),应出现执行回参考点操作。
7.406号报警报警信息: “SERVO ALARM:7,8th axis overload 7,8th axis VRDY off”,伺服报警:第7、第8轴过载,第7、第8轴VRDY信号关断。
报警说明: 第7轴或者第8轴过载信号接通或者伺服放大器模块准备好信号(VRAY)断开(伺服放大器故障)。
8.408号报警报警信息: “Spindle serial link start fault”,主轴串行连接启动错误。
9.409号报警报警信息: “Spindle alarm detection”,主轴报警检测。
报警说明: 串行主轴故障,详见串行主轴放大器模块上的故障报警号AL××并查相关说明。
10.4n0号报警报警信息: “SERVO ALARM:nth axis excess error”,伺服报警:第n轴超差错误。
报警说明: 第n轴停止时的位置误差大于设定值。
11.4nl号报警报警信息: “SERVO ALARM:nth axis excess error”,伺服报警:第n轴超差错误。
报警说明:第n轴移动中的位置误差大于设定值。
12.4n3号报警报警信息: “SERVO ALARM:nth axis LSI overflow”,伺服报警:第n轴误差寄存器溢出。
报警说明:第n轴的位置误差寄存器的内容超过±3267或者D/A转换器的指定速度超过±8192,该故障可能由某些参数设定错误而引起的。
13.4n4号报警报警信息: “SERVO ALARM:nth axis detection related error”,伺服报警:第n轴检测错误。
报警说明;第n轴的数字伺服系统故障,详见诊断参数720~727。
14.4n5号报警报警信息: “SERVO ALARM:nth axis excess shift”,伺服报警:第n轴位移超差。
报警说明: 由于指令倍率参数CMR的设定错误,使第n轴的速度超出511875个检测单位/s。
15.4n6号报警报警信息: “SERVO ALARM:nth axis disconnection”,伺服报警:第n轴断开。
报警说明:第n轴的位置脉冲编码器断线报警。
16.4n7号报警报警信息: “SERVO ALARM:nth axis parameter incorrect”,伺服报警:第n轴参数不正确。
报警说明: 在下列情况下出现这个报警(数字伺服系统):①机床数据No.8n20(电机形式)的设定值在设定极限之外;②机床数据No.8n22(电机旋转方向)没有设定特定的值(111或-111);③机床数据No.8n23(电机每转速度反馈脉冲数)设定为非法数值(比0小);④机床数据No.8n24(电机每转位置反馈脉冲数) 设定为非法数值(比0小);⑤机床数据No.8n84 No.8n85没有设定;⑥轴选择机床数据(从No.269到No.274)设定不正确;⑦在参数计算期间出现溢出。
17.490号报警报警信息: “SERVO ALARM:5th axis over load”,伺服报警:第5轴过载。
报警说明:第5轴、第6轴过载信号开。
参考诊断显示号724或725的详述。
18.491号报警报警信息: “SERVO ALARM:5,6th VRDY off”,伺服报警第5、第6轴VRDY信号断开。
报警说明:第5轴、第6轴伺服放大器准备信号(DRDY)关闭。
19.494号报警报警信息: “SERVO ALARM:5,6th VRDY on”,伺服报警第5、第6轴VRDY信号接通。
报警说明:第5轴、第6轴轴卡准备信号(MCON)关闭,但伺服放大器没有准备信号(DRDY)。
或者在电源加上后,有DRDY信号,但MCON信号没有。
保证轴卡和伺服放大器正常连接。
20.495号报警报警信息: “SERVO ALARM:5,6th axis zero return”,伺服报警第5、第6轴零点返回。
报警说明: 这是位置控制电路故障。
可能因为NC或者伺服系统的问题导致返回参考点错误。
重新回参考点。
五、超程故障报警1.510号报警。
报警信息: “Over travel:+X axis”,超程:+X轴。
报警说明:X轴正方向超过设定的软件限位。
2.511号报警报警信息: “Over travel:-X axis”,超程:-X轴。
报警说明:X轴负方向超过设定的软件限位。
3.512号报警报警信息: “Over travel:+X axis”,超程:+X轴。
报警说明:X轴正方向超过设定的第二软件限位。
4.513号报警报警信息: “Over travel:-X axis”,超程: -X轴。
报警说明:X轴负方向超过设定的第二软件限位。
5.514号报警报警信息: “Over travel:+X axis”,超程:+X轴。
报警说明:X轴正方向超过设定的0T硬限位位置(仅用于M系列)。
6.515号报警报警信息: “Over travel:-X axis”,超程:-X轴。
报警说明:X轴负方向超过设定的0T硬限位位置(仅用于M系列)。
7.520号报警报警信息: “Over travel:+Y (Z) axis”,超程:+Y(Z)轴。
报警说明:Y轴(M系统)或Z轴(T系列)正方向超过设定的软件限位。
8.521号报警报警信息: “Over travel:-Y (Z) axis”,超程:-Y(Z)轴。
报警说明:Y轴(M系统)或Z轴(T系列)负方向超过设定的软件限位。
9.522号报警报警信息: “Over travel:+Y(Z)axis”,超程:+Y(Z)轴。
报警说明: Y轴(M系统)或Z轴(T系列)正方向超过设定的第二软件限位。
10.523号报警报警信息: “Over travel:-Y(Z) axis”,超程:-Y(Z)轴。
报警说明: Y轴(M系统)或Z轴(T系列)负方向超过设定的第二软件限位。
11.524号报警报警信息: “Over travel:+Y(Z) axis”,超程:+Y(Z)轴。
报警说明:Y轴(M系统)或Z轴(T系列)正方向超过设定的0T硬限位位置(仅用于M系列)。
12.525号报警报警信息: “Over travel:-Y (Z) axis”,超程:-Y (Z)轴。
报警说明: Y轴(M系统)或Z轴(T系列)负方向超过设定的0T硬限位位置(仅用于M系列)。
13.530号报警报警信息: “Over travel:+Z axis”,超程:+Z轴。
报警说明:Z轴正方向超过设定的软件限位(仅用于M系列)。
14.531号报警报警信息: “Over travel:-Z axis”,超程:-Z轴。
报警说明:Z轴负方向超过设定的软件限位(仅用于M系列)。
15.532号报警报警信息: “Over travel:+Z axis”,超程:+Z轴。