川崎工业机器人操作课件
- 格式:ppt
- 大小:2.79 MB
- 文档页数:76
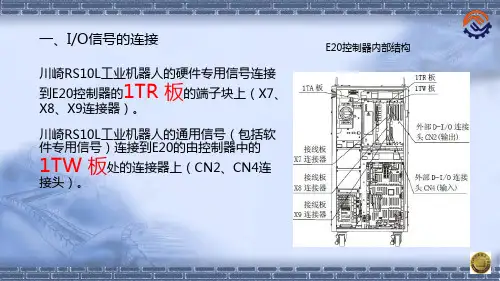
川崎机器人操作说明目录示教器主界面 (2)如何在接口面板和程序窗口之间切换 (5)接口面板有几页,如何翻页 (6)如何切换手动模式和自动模式 (6)如何手动移动机器人 (7)如何示教位置 (8)如何将机器人移动至抓取点或已示教的点 (12)如何查看机器人输入输出IO状态 (13)如何手动控制抓手打开合上 (14)示教器主界面示教器界面分两种,一种是显示接口面板如下图所示:一种是显示程序,如下图所示:按下机器人键,可以在接口面板和程序之间切换。
下面对机器人界面做个介绍显示机器人处于手动模式(示教),还是自动模式(再线)。
显示当前正在执行的前台程序。
显示当前正在执行的后台程序。
运转/暂停机器人,当机器人停止时,显示hold ,当机器人正在运行时,显示RUN打开/切断马达电源,灰色表示电源关闭。
启动循环操作,当为绿色时,正在循环执行程序。
机器人当前坐标系,点击它可以切换坐标系。
这个很重要,如果机器人不运行,检测是否设置为步骤连续,再现连续。
操作接口面板有些按钮,需要切换到许可。
这个是接口面板,上面有一些操作按钮,右右上角可以看到,这个一共有8页,当前处于第一页。
自动运行的速度,手动运行的速度,点击它,可以设定速度。
程序窗口如何在接口面板和程序窗口之间切换按下CC键,即可切换。
接口面板有几页,如何翻页1/8 表示一共有8页,当前处于第一页翻页请先按下“A”键,再按“上下”键。
如何切换手动模式和自动模式切换手动模式吧下面图中开关都拧到手状态,即为手动模式。
反之,则为自动模式。
这个开关在示教器上这个开关在控制柜上如何手动移动机器人首先,将机器人切换到手动状态下点击此按钮调整一下手动移动的速度(刚开始不熟悉的情况下,调成2或3)。
点此按钮切换坐标系,可以使用base坐标系,和joint坐标系,不要使用tool坐标系。
将RUN 和MOTOR 点亮(点亮的方法为:按住A键,再点击此图标即可)。
Cycle 不用点亮(实际上,只有自动才能点亮)按下背面的使能开关再按下轴移动键如何示教位置第一步,点击当前程序窗口按下键,点击列表。