哈工大研制成功世界首个水下全双工水声通信机
- 格式:docx
- 大小:16.90 KB
- 文档页数:1
工业和信息化部、教育部、科技部关于向“时代楷模”杨士莪同志学习的决定文章属性•【制定机关】工业和信息化部,教育部,科学技术部•【公布日期】2024.09.27•【文号】工信部联人〔2024〕188号•【施行日期】2024.09.27•【效力等级】部门规范性文件•【时效性】现行有效•【主题分类】工业和信息化管理其他规定正文工业和信息化部教育部科技部关于向“时代楷模”杨士莪同志学习的决定工信部联人〔2024〕188号各省、自治区、直辖市和新疆生产建设兵团工业和信息化、教育、科技主管部门,部属各高等学校、部省合建各高等学校,各有关单位:杨士莪,男,汉族,1931年生,河南南阳人,中共党员,中国工程院院士、哈尔滨工程大学教授,中国水声工程学科奠基人和水声科技事业开拓者之一。
杨士莪同志75年如一日,聚焦国家重大战略需求,带领科研团队创建了我国首个理工结合、配套完整、覆盖全面的水声工程专业;完成了“东风五号”洲际导弹落点水声测量系统等一系列具有国际水平的水声定位系统研制工作,为“蛟龙号”载人潜水器的定位系统研制奠定坚实基础;主持设计建造了我国首个“重力式低噪声水洞”,领导关键技术的基础研究;完成我国首次独立大型深海水声综合考察,引领中国水声走向深海,为加快建设海洋强国作出突出贡献。
曾荣获“全国教书育人楷模”“龙江楷模”等称号。
2024年3月逝世,享年93岁。
2024年9月19日,中共中央宣传部发布决定,追授杨士莪同志“时代楷模”称号。
杨士莪同志用一生的坚守和付出生动诠释了对党的忠诚、对祖国的热爱、对事业的执着,是爱党报国、倾听海洋声音的杰出科学家,是推进教育强国、科技强国、人才强国建设的先锋模范,是为党育人、为国育才的优秀代表。
为学习宣传杨士莪同志先进事迹,大力弘扬科学家精神、教育家精神,激励广大科技工作者、教育工作者、工程技术人员等以“时代楷模”为榜样,在加快建设教育强国、科技强国、人才强国中当先锋、作表率,工业和信息化部、教育部、科技部决定开展向杨士莪同志学习活动。
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
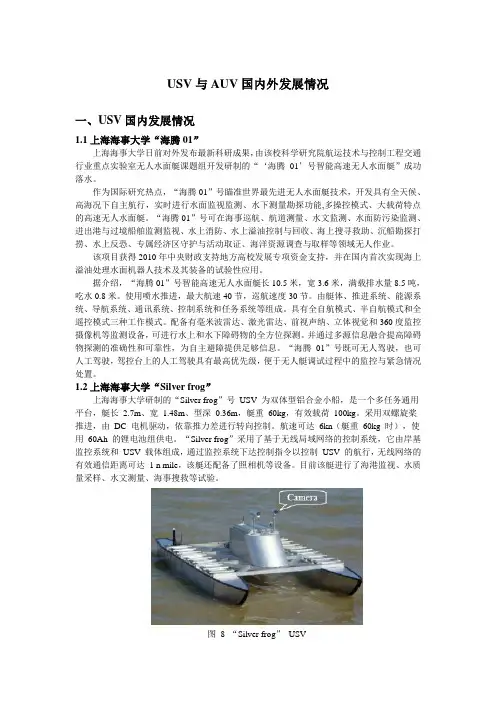
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
哈尔滨工程大学科技成果——水下信息网络系统项目概述水下信息网络系统提供可靠的通信链路,各个固定或移动节点均可自由的接入网络,快速准确的收发信息,从而构成跨系统,跨任务,跨平台的综合性分布自主式水下综合信息网络体系,增强水下信息透明度。
项目主要具备的能力包括:近程高速率OFDM水声通信(高速率),远程低信噪比稳健扩频水声通信(低速率),基于分布式信息网络的被动隐蔽定位,自由接入且自主修复的动态半自主式网络,释放器的数据传输与遥控释放的功能集成。
本项突破了多项关键技术,研制了多种类的水声通信节点,实现了基于网络的顶层应用功能设计及验证,获得了多项具有自主支持产权的研究成果。
(1)远程水声通信技术研究了水下扩频通信技术,采用多普勒搜索跟踪及RAKE接收机技术解决了浅海、运动条件下的远程、低功耗水下通信的可靠性问题。
通信速率为35bps,最大通信距离超过50公里,误码率低于10-4。
该指标为国内领先水平。
研究了宽带正交多载波扩频调制及改进的RAKE接收机技术,海上试验的通信速率为115bps,误码率10-4。
研制了多节点水下数据无线传输设备,已成功应用于某海军港口堤坝安全监测中。
实现了岸基单元对水下节点的遥测及节点数据回传,传输距离超过6公里。
该成果已达到国内领先水平。
(2)高速水声通信技术为解决水下声通信速率过低的问题,研究了OFDM水声通信系统中的宽带匹配、子载波调制、高速信号处理等技术,在浅水水平信道实现最大通信距离3.5km,最大通信速率50kbps以上,最低误码率10-6。
垂直信道情况下,实现实时视频传输,通信速率为53.2kbps,误码率为10-5。
目前只有美国和日本进行过类似的试验,该指标达到国际先进水平。
(3)全双工水声通信技术创新性的提出了基于矢量传感器的全双工水声通信技术,采用OFDM和扩频两种通信制式和基于矢量传感器的收发分置的设计方案,综合频分、码分和空分等多种技术手段,首次成功研制了3个具有多用户和全双工通信能力的水下通信网络节点。
哈尔滨工程大学科技成果——深海探测型载人潜器项目概述
海洋是地球上尚未被人类充分认识和开发利用的各种自然资源潜在的战略基地,海洋的科学研究离不开各种海洋装备,深海载人潜水器就是可以运载科学家和各种工程人员进入深海亲临其境进行直观观察和进行各种科学研究的重要装备。
深海探测型载人潜水器是哈尔滨工程大学发挥学校在潜器及水下机器人方面的优势而研制的,潜器总长12.3米、宽3.2米、高2.4米,首部配备有机械手一部,可以完成一般的水下作业任务。
推进系统采用了六个高效导管推进器,可以使潜器灵活的进行空间六自由度运动,同时还配备了先进的定位、导航、通信、生命支持系统等。
该型载人潜器的特点具有:下潜深度大、内部空间宽敞、水下作业时间长、续航力大的等特点。
其作业深度可以在大部分海域进行探测任务,同时该型潜器强大的载荷代换功能,可以满足几十名人员和大量物资的运送任务,也意味着潜器具有很大的改造和升级的空间,该型潜器所具有多功能特点为国内首创:集科学探测、物资和人员输送等多种功能于一体。
项目成熟
情况技术成熟,填补国内空白。
应用范围
深海资源开发领域。
哈尔滨工程大学科技成果——小型水下机器人遥控设备
成果简介
Handle系列小型水下机器人遥控系统是具备国家领先技术的小型化水声通信设备,是专门为小型水下潜器提供可靠数据通信链路的一种通用型水声通信终端。
本系列产品具备体积小、重量轻、距离远、功耗低、多体制等核心优点,能够满足不同用户对报文、短信息、数字语音、数字图像、控制命令、大量数据等水下无线通信需求。
本系统既可作为水下潜器控制和反馈系统的一部分,对水下潜器进行实时远程控制和工作状态监控,也可单独实现各种水下平台的数据实时上传、水上命令实时下载、遥控指令即时响应、水下状态实时更新等功能。
同时本系统还具备水下多点组网功能,实现水下信息网、水下传感器网等功能,可满足水下潜器集群编队组网等需求。
项目成熟情况
本系列产品已发展为多种型号的产品,可根据用户对通信距离和通信速率的需求,合理配置系统参数,优化系统资源,节约能量消耗。
总体技术水平达到国际先进水平。
总体成熟度达到8-9级。
应用范围
本系统可广泛应用于遥控各种UUV、仿生鱼、水下机器人等无人潜器。
也可作为标准通信机,安装于各种海洋浮标、潜标,作为数据传输节点,在我国渤海、黄海、东海等复杂海洋环境下稳定工作。
哈尔滨工程大学科技成果——水下语音通信系统
项目概述水声语音通信机又称“水下移动电话”、“水下对讲机”,保持了很高的语音质量,通话完整连续,延迟短,在很多领域,如水下考古、海洋环境监测、水下电缆管道监测维修、潜水观光等商业民用领域也有非常广泛的应用。
本项目在国际上首次采用OFDM调制方式在水声信道中传输语音信号,突破了运动条件下,恶劣海洋环境和水文条件下的高速、高可靠性实时连续通信的关键技术,解决了复杂水声信道中大数据率信号实时传输以及小数据率信号可靠传输的问题,满足了语音通信中对信号传输的带宽和实时性的要求,研制了“数字式水声语音通信处理”设备,开发了一系列软件、算法,实现了水面与水下载人潜水器、水下潜器之间、潜水员之间的实时通话。
知识产权情况实时水声通信中基于DDS的多普勒补偿装置,ZL201010101289.8;一种用于水下机器人的通信转发系统,ZL200810064110.9;一种数字式水下语音通信装置及水下语音通信方法,CN103457903。
项目成熟情况该项目已完成样品阶段,已经为多个单位设计了实用系统。
该项目整体达到国际先进水平,已经应用于中船重工七五〇试验场的湖上测试系统、中船705研究所的水下通信系统中。
应用范围深海载人潜水器、潜水员、蛙人作战部队、水下检测与维修、海底油气资源开发、海洋环境的监测、水下考古、潜水运动、旅游观光等领域。
哈尔滨工程大学科技成果——深海声通信系列换能器
项目概述
深海换能器是为适应我国走向远海和国家深海发展战略提出的。
各种深水潜航器、深海声学节点离不开能够适应深海压力环境的水声换能器,海洋工程领域中深海地质地貌普查及深海油气资源勘探需要深海低频大功率声发射设备支持。
深海换能器系列包含压电圆管深海换能器和Janus-Helmholtz深海换能器,可用于深海水声通信、低频主动声呐和深海资源勘探设备。
其中深水圆管换能器系列工作频率分别为5-11kHz和7-17kHz,最大声源级分别为194dB和191dB,工作深度6000米;深水Janus-Helmholtz 换能器工作频带500-2kHz,最大声源级200dB,工作深度3000米。
该产品解决了水声换能器高静水压环境下结构耐压问题,且该环境下仍具有良好的声学性能。
因此深海换能器市场前景广阔,具有较好的经济效益和社会效益。
项目成熟情况
该成果目前技术较为成熟,产品性能稳定,处于小批量生产阶段。
应用范围
压电圆管深海换能器具有水平无指向性、工作频带宽、声源级高的特点,可用于深海水声通信、声呐浮标、应答器等水下对抗设备中。
深水Janus-Helmholtz换能器具有低频、宽带、大功率深水工作等特点,可用于低频大功率主动声呐、远程水声通信、深海油气资源勘探设备等。
基于水声通信的水下机器人智能控制水下机器人是近年来广受欢迎的一种智能机器设备,它可以用于许多领域,例如海洋资源调查、海洋生物研究、海洋灾害应对等。
但是,水下机器人在水下环境中存在着许多挑战,例如水下环境的复杂性、通信距离的限制等等。
基于水声通信的水下机器人智能控制成为了一种重要的解决方案,可以有效地克服这些挑战。
一、水声通信技术的优势水声通信技术是一种在水下环境中进行通信的技术,它具有以下几个优点:1. 高隐蔽性由于水声通信的信号会随着水的传播而散射,所以外界的干扰较小,信号传输的安全性较高。
2. 低成本水声通信的设备成本相对较低,相对于其他通信方式,例如激光通信、无线电通信等,水声通信的设备成本低很多。
3. 适用环境广泛水声通信技术适用范围广泛,可以用于深海、河流、湖泊等不同的水下环境中。
二、水声通信技术的应用水声通信技术的应用非常广泛,其中包括水下测量、水下定位、水下探测等多个领域。
对于水下机器人来说,水声通信技术可以解决机器人与控制中心之间通信距离较短的问题,同时也可以使机器人实现更为复杂的任务。
三、水声通信技术在水下机器人中的应用水下机器人是一种具有高度智能化的自主机器人,它的智能控制需要稳定可靠的通信方式支持。
在水下环境中,水声通信技术可以实现机器人与控制中心之间的实时通信,使机器人的智能控制更为精准。
在实际应用中,水声通信技术主要应用在以下几个方面:1. 机器人的远程操纵在使用水下机器人进行深海探测、海洋监测等任务时,常常需要远程控制机器人进行复杂的操作。
通过水声通信技术,机器人与控制中心之间可以实现实时的通信,使操纵更为精准。
2. 机器人的自主导航水声通信技术还可以帮助机器人进行自主导航。
机器人内置传感器可以通过水声信号获取所处位置和环境信息,然后进行自主规划、自主导航,实现更为精准的自主控制。
3. 数据传输水下机器人的任务往往需要将采集到的数据及时传输到控制中心,以实现实时监测和数据分析。
哈工程水声培养方案一、前言水声工程是指通过水声传播技术在水下进行通信、探测、定位等工作。
现代水声工程在军事、海洋资源勘探、海底地质探测等领域有着广泛的应用。
哈工程作为国内一流的工科院校,在水声工程领域拥有很强的技术实力和科研实力。
水声培养方案的制定对于培养学生的水声工程专业能力,提高学生在水声工程领域的竞争力具有重要意义。
二、水声工程课程设置1.水声理论水声理论是水声工程专业的核心课程,主要内容包括水声波的传播、水声信号的特性、水声信号处理、水声传感器等方面的基本原理和技术。
学生要通过水声理论课程的学习,掌握水声工程的基本理论知识,为后续的专业课程学习打下基础。
2.水声信号处理水声信号处理是水声工程中的重要课程,主要内容包括水声信号的采集、处理、识别和分析等技术。
学生要通过水声信号处理课程的学习,掌握水声信号处理的基本原理和技术方法,具备水声信号处理方面的专业能力。
3.水声传感器水声传感器是水声工程中的关键技术,主要内容包括水声传感器的种类、原理、设计和应用等方面的知识。
学生要通过水声传感器课程的学习,掌握水声传感器的基本原理和设计方法,具备水声传感器方面的专业能力。
4.水声通信水声通信是水声工程中的重要应用领域,主要内容包括水声通信的原理、技术、系统设计和应用等方面的知识。
学生要通过水声通信课程的学习,掌握水声通信的基本理论和技术方法,具备水声通信方面的专业能力。
5.水声工程实践水声工程实践是水声工程专业的重要环节,主要内容包括水声工程的实际应用、工程项目的规划和实施等方面的实践能力培养。
学生要通过水声工程实践课程的学习,掌握水声工程实践的基本方法和技术,具备水声工程实践方面的专业能力。
三、水声工程实验室建设1.实验室设施水声工程实验室应该配置有先进的水声信号采集系统、水声信号处理系统、水声传感器测试设备、水声通信系统等实验设备。
实验室设施应该具备实际工程项目需要的水声数据采集、处理、传输和应用的能力。
哈尔滨工程大学科技成果——船舶动力定位系统项目概述哈尔滨工程大学从事动力定位技术研究已有三十年历史,创新研制了多项国内外领先的技术和产品,多次获得国家科技进步奖。
主要产品有:我国首台水面船动力定位系统:ROV工作母船“HDP301型动力定位控制系统”、装备在胜利油田“浅海海底管线电缆检测与维修装置”上的“IODP-I型智能综合操纵和动力定位系统”、海洋救助船“HDP501型动力定位控制系统”等。
该系列动力定位产品应用了差分全球定位系统,非线性滤波技术,以及最优控制、非线性控制等先进技术,其核心技术-动力定位技术是属于船舶及海洋平台的高新控制技术,涉及水动力学、操纵性理论、控制理论、自动控制、计算机技术和海洋环境等多个学科,可使处在风、海浪、海流环境中的船舶能完成以前不能(或很难)完成的水面和水下作业,产品的定位精度均在几米之内,达到国际主流水平,打破了动力定位技术长期受国外垄断的现状,对当今海洋开发和装备发展有重要意义。
专利获奖情况此系列产品共申报专利六项,一种基于推力分配管理的动力定位船推力分配方法(201210177475);基于在线可用功率的动力定位船推进器负载限制方法(201210177458);基于软件同步的可降级三模冗余计算机系统(201210166434);单自由度船用激光测距仪稳定平台及控制方法(201110325164.8);基于激光测距仪的两船相对位置测定方法(201110115222.4);单球壳对接裙(ZL200610151168.8)。
获奖情况:7103艇浮力微调和自动定深微机控制系统,国家科技进步三等奖,1985年;深潜救生艇动力定位和集中控制与显示系统,国家科技进步三等奖,1999年;双工型沉雷探测和打捞潜器,国防科技一等奖,2000年;援潜救生潜器六自由度动力定位技术和新型对接装置,国防科技一等奖,2002年。
市场前景由于国内配套动力定位系统船舶的需求越来越大,预期未来三年的我国DP产品销售量在100-200套,按每套(含推进系统)平均销售6000万人民币,总销售额达60亿-120亿,利润12亿-24亿。
水声通信技术在水下机器人控制中的应用在当今科技飞速发展的时代,水下探索和作业的需求日益增长,水下机器人作为重要的工具,在海洋科学研究、资源勘探、军事侦察等领域发挥着关键作用。
而要实现对水下机器人的精确控制和有效数据传输,水声通信技术成为了至关重要的一环。
水声通信,简单来说,就是以水为介质进行声音信号的传输和接收,从而实现信息的交流。
与我们熟悉的空气中的无线通信相比,水下环境有着巨大的差异,给通信带来了诸多挑战。
水的物理特性对声音的传播有着显著影响。
首先,水的密度比空气大得多,声音在水中传播时的衰减速度更快。
这就意味着,水声信号在传播过程中会迅速减弱,有效通信距离受到很大限制。
其次,水下存在着复杂的水流、温度梯度和盐度差异,这些因素会导致声音的折射和散射,使得信号的传播路径变得曲折和不稳定。
此外,海洋中的背景噪声,如海洋生物发出的声音、海浪和船舶的噪声等,也会对水声通信造成干扰。
面对这些挑战,水声通信技术在不断地发展和创新。
为了提高通信的可靠性和效率,研究人员采用了多种技术手段。
比如,采用合适的调制解调方式,来增强信号的抗干扰能力和传输效率。
常见的调制方式包括幅度调制、频率调制和相位调制等,它们可以根据不同的应用场景和需求进行选择和优化。
编码技术也是提高水声通信性能的重要手段之一。
通过采用纠错编码,可以在接收端检测和纠正传输过程中产生的错误,从而提高通信的可靠性。
此外,多输入多输出(MIMO)技术也被引入到水声通信中,通过使用多个发射和接收传感器,增加通信的空间自由度,提高信道容量和传输速率。
在水下机器人控制中,水声通信技术扮演着“桥梁”的角色。
它负责将控制指令从控制端准确无误地传输到水下机器人,同时将机器人采集到的数据和状态信息反馈给控制端。
这一过程的实现,需要通信系统具备低延迟、高可靠性和高带宽等特性。
低延迟对于实时控制至关重要。
想象一下,如果控制指令在传输过程中出现较大的延迟,那么水下机器人的动作就会滞后,可能无法及时应对复杂的水下环境变化,从而影响任务的执行效果甚至导致危险。
杨士莪,哈尔滨工程大学教授、中国工程院院士,全国最早的水声领域研究专家之一,现任中国声学学会名誉理事长。
杨士莪参与研制水声定位系统,并完成一系列长基线、短基线和超短基线水声定位系统,为中国水声学科建设、制定水声发展规划作出了贡献,专著有《水下噪声学》《水声传播原理》。
他积极推动我国大型深海水声综合考察任务,并获取了大批宝贵资料。
在杨士莪的倡导下,我国第一个理工结合的水声专业诞生了。
如今,哈尔滨工程大学创建的水声专业已成长为我国著名的水声科研基地和水声人才培养基地。
1981年,该学科获得国家第一批博士学位授予权;1987年,第一批成为国家重点学科并建立了博士后科研流动站;1993年,国家级国防科技重点实验室在此建立……从这里走出去的人才,为我国水声领域的科学研究发挥了重要作用。
人物解读角度一:“国家需要什么,我就研究什么”。
杨士莪的童年,正逢战乱、家境贫寒。
他曾跟随家人辗转多地,并逐渐在心里埋下了科研报国的种子。
1950年,正在清华大学物理系读书的杨士莪感受到国家的需要,心中暗想:“参与海军建设既能完成报国夙愿,又能在国家建设中找到一个适合自己并能胜任的岗位。
”于是,他毅然报名参军,提前告别了学生时代。
几年的军队生活后,杨士莪被抽调北上,参与哈尔滨军事工程院校组建,成为第一批教员。
水声工程,是对水下声学特性及其应用的研究。
光波、电磁波在水中都会有严重的衰减,只有声波可远距离进行信息传递而衰减较少。
因此,在探测海里情况方面,水声科技至关重要。
当时,我国水声科学研究仍很薄弱。
为此,杨士莪自学多门外语,一头扎进了这个陌生领域。
“国家需要什么,我就研究什么。
”回忆当时的选择,杨士莪这样说。
运用示例我们应将自我理想融入国家理想,以国家理想成就自我理想,这样不仅可院士杨士莪——倾听大海的声音34以激励我们成为更好的自己,还可以为国家富强贡献出自己的一份力量。
我国水声领域专家杨士莪从踌躇满志的学子到耄耋之年的科研泰斗,他用一甲子的悠长岁月守护祖国一片蔚蓝。
水面母船与水下用户双向水声通信方案分析+殷敬伟*赵安邦惠俊英(哈尔滨工程大学水声工程学院哈尔滨 150001)摘要:基于时间反转镜技术,提出了母船与水下用户双向水声通信方案。
上行通信采用虚拟式时间反转镜,可在接收机中通过数字卷积运算实现TRM;下行通信采用主动式时间反转镜,利用上行通信中接收到的探测码的时间反转作为信息码元载体,有助于减少水下用户端信道均衡设备复杂性并节省功耗。
通过计算机仿真研究,验证了系统能够有效地抑制声信道多途扩展产生的码间干扰,具有很好的鲁棒性。
关键词:水声通信;码间干扰;空间分集;时间反转镜The analysis of underwater acoustic bidirectional communication scheme between the surface depot-ship and underwater usersYin Jingwei*Zhao Anbang Hui Junying(College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin, 150001)Abstract: The underwater acoustic bidirectional communication scheme between the surface depot-ship and underwater users based on time reversal mirror is proposed in this paper. V irtual time reversal mirror is applied to upstream communication implemented by convolution in computer instead of ocean channel. For downstream communication, active time reversal mirror is adopted to reduce the complexity and power-cost, which makes use of the received probe-code at upstream communication. The results of computer simulations show that the underwater acoustic communication system could mitigate the intersymbol interference robustly caused by acoustic multipath channel.Key words: Underwater acoustic communication; Intersymbol interference; Space diversity; Time reversal mirror海洋资源开发和海洋环境立体监测系统大都包括海底传感器、自主式水下运载器(AUV)、水下试验仪器和水面母船等。
水声通信技术的发展及特性分析水声通信技术是一种利用水介质传输信息的通信技术。
它利用水的高传导性和低衰减特性,可以实现远距离的无线通信。
随着科技的不断发展,水声通信技术也取得了巨大的进展,并应用于海洋勘探、水下通信、海洋监测、水下无人机以及水下导航等领域。
水声通信技术发展的历程可以追溯到20世纪初,当时人们首次意识到水声可以用作信息传输的媒介。
在此基础上,人们开始研究水声信号的传输原理和技术,逐渐发展出了一系列水声通信设备和技术。
20世纪80年代以后,随着计算机和数字信号处理技术的不断发展,水声通信技术也进入了一个新的阶段。
目前,水声通信技术已经具备了高速率、高可靠性和高带宽的特点。
1.高传导性:水声通信技术利用水的高导电性和传导性,可以实现远距离的通信。
在水中的传输损耗相对较小,信号传输的损耗也较小,使得水声通信技术适用于远距离通信。
2.低频率:水声通信技术常常使用低频信号进行通信,通信频率一般在10Hz到100kHz之间。
低频信号传播损耗较小,传输距离较远,适用于海洋勘探和海洋监测等领域。
3.抗干扰性:水声通信技术在水环境中的抗干扰性较强。
由于水声信号的传播受到水体环境的影响比较大,其他类型的信号很难通过水传播,从而减小了干扰的可能性。
4.低带宽:水声通信技术的带宽相对较小,一般在几百到几千比特每秒之间。
由于水声信号的传播速度相对较慢,带宽受到限制,因此在传输大容量数据时存在一定的限制。
5.较高延时:水声通信技术的传播速度较慢,约为1500米/秒,相比于其他通信技术的传播速度较低,因此会产生较高的传输延时。
6.多径效应:在水声通信中,存在多径传播的现象,即信号会经过多个路径到达接收端,导致信号叠加和衰减。
这种多径效应对信号质量和通信性能有一定的影响。
水声通信技术的发展和特性使得它在海洋领域和水下通信领域具有重要的应用价值。
例如,在海洋勘探中,水声通信技术可以用于水下声纳、声呐和声学测深仪等设备,实现水下探测和定位。
13所撑起中华国防的军工院校哈尔滨工程大学前身是创建于1953年的中国人民解放军军事工程学院(“哈军工”)。
1994年,更名为哈尔滨工程大学;2007年,由国防科工委、教育部、黑龙江省政府、海军四方共建。
学校现隶属于国家工业和信息化部,是我国“三海一核”(船舶工业、海军装备、海洋开发、核能应用)领域重要的人才培养和科学研究基地。
学校是首批入选“卓越工程师教育培养计划”高校,并被教育部、总政治部列入“21世纪人才强军计划”。
不仅以国内第一艘实验潜艇、第一艘水翼艇、第一台舰载计算机、第一套条带测深仪等数十项填补国内空白的重大科研成果著称,而且还以双工型潜器、气垫船、梯度声速仪等成果摘取过世界第一的桂冠。
学校在船海核领域保持着很强的技术储备。
当前,学校是“深海空间站工程”六个系统中三个系统的牵头单位,是“蛟龙号”7000米载人潜水器水下导航定位系统国产化的装备提供方。
学校具有“三海一核”领域主体学科特色鲜明、相关学科支撑配套、专业结构布局合理的特色学科专业体系。
学校拥有国防特色学科11个、国防特色专业7个。
“现代舰船与深海工程”跻身国家“优势学科创新平台”行列,材料科学、工程学、化学进入ESI全球前1%行列。
学校拥有:“十一五”国防特色紧缺学科(3个):核能科学与工程、核技术及应用、隐身技术与工程“十一五”国防特色主干学科(3个):轮机工程、导航、制导与控制、通信与信息系统“十一五”国防特色骨干学科(2个):船舶与海洋结构物设计制造、水声工程“十一五”国防特色新兴交叉边缘学科(2个):船舶电磁兼容、熔体化学与物理“十一五”国防特色支撑性基础学科(1个):固体力学原国防科工委“十五”重点学科(7个):固体力学、导航制导与控制、船舶与海洋结构物设计制造、轮机工程、水声工程、核能科学与工程、辐射防护与环境保护北京航空航天大学成立于1952年,由当时的清华大学、北洋大学、厦门大学、四川大学等八所院校的航空系合并组建,是新中国第一所航空航天高等学府,现隶属于工业和信息化部。